Идентификация электропривода постоянного тока с использованием интеллектуальных технологий

Автор: Бида П.И., Старчевский М.В.
Журнал: Форум молодых ученых @forum-nauka
Статья в выпуске: 4 (8), 2017 года.
Бесплатный доступ
В статье рассматривается применение интеллектуальных технологий для задач управления и идентификации электропривода постоянного тока. Описан выбор типа нейронной сети. Представлены результаты моделирования. Дана оценка пригодности данных методов для решения поставленных задач.
Электропривод, нейронные сети, многослойный персептрон, идентификация
Короткий адрес: https://sciup.org/140278084
IDR: 140278084
Identification of dc motor using intelligent technologies
The article discusses the application of intelligent technologies for solving management tasks and identification of a DC motor. Describes the selection of the type of neural network. Shows the simulation results. To assess the suitability of these methods for tasks.
Текст научной статьи Идентификация электропривода постоянного тока с использованием интеллектуальных технологий
Современный электропривод представляет собой конструктивное единство двигателя (электромеханического преобразователя энергии) и силового преобразователя с системой управления. Он обеспечивает преобразование электрической энергии в механическую в соответствии с алгоритмом работы технологической установки. Сфера применения электрического привода в промышленности, на транспорте и в быту постоянно расширяется.
Рост степени интеграции в микропроцессорной технике и переход от микропроцессоров к микроконтроллерам с встроенным набором специализированных периферийных устройств, значительные успехи силовой электроники, сделали необратимой тенденцию массовой замены аналоговых систем управления приводами на системы цифрового управления. Учитывая возрастающее количество регулируемого электропривода, требуются программно реализуемые, эффективные и универсальные методы. [2],[5].
Современный электропривод, удобно рассматривать в пространстве его состояний или в качестве объекта типа “черный ящик”. При этом существует задача его оптимизации по какому-то критерию. Для осуществления данной задачи требуются новые эффективные подходы. Сравнительно новый подход, это интеллектуальные методы, позволяющие построить модель технического объекта альтернативными способами на основе эмпирического опыта человека или наблюдения за параметрами объекта.
В данной статье рассмотрен нейросетевой подход в методах искусственного интеллекта применимо к техническим объектам управления. Он базируется на формализованных принципах построения связей в нервной системе живых организмов и воплощен в искусственных нейронных сетях. Данный метод позволяет построить модель объекта, имея некоторую выборку его входов и выходов. Согласно теореме об универсальной аппроксимации многослойной нейронной сети, утверждающей, что многослойной сети с одним скрытым слоем достаточно для получения равномерной аппроксимации с точностью для любого обучающего множества, представленного входами ■ I ■ - • ■ и желаемых откликов
■ I ■ - ■ . Теорема является математическим доказательством возможности аппроксимации любой непрерывной функции [1],[6], [4].
Данная работа посвящена вопросу применения искусственных нейронных сетей для решения задач идентификации и построения моделей линейных многомерных динамических систем. В рамках данной статьи рассмотрено применение нейронной сети для частного случая идентификации электропривода постоянного тока. Точность идентификации, в данном случае, зависит от количества обучающих примеров типа «вход-выход» применительно к параметрам конкретного электропривода. В работе используется структура сети прямого распространения, то есть многослойного персептрона, для построения математических моделей. Простота и универсальность персептрона являются основанием выбора его в качестве основы [7]. Многослойные персептроны применяют для решения задач аппроксимации, прогнозирования, управления классификации и т.д. Теоретической основой успешного применения нейросетей прямого распространения на практике являются их универсальные аппроксимационные способности. Уже стандартные сети являются аппроксиматорами непрерывных функций нескольких переменных, заданных на компактном множестве. Другими словами, они способны приблизить непрерывную функцию с любой заданной точностью. Эти возможности восходят к хорошо известным теоремам из теории аппроксимации (теорема Вейерштрасса о приближении полиномами, теорема Стоуна, результаты В.И. Арнольда и А.Н. Колмогорова) [1],[4].
Работа одновыходной стандартной нейросетей прямого распространения описывается формулой [4]:

где q – количество нейронов единственного скрытого слоя;
wij – вес i-го нейрона скрытого слоя, идущий от j-го входа,
-
j = 1, . . n;
wi0 – вес фиктивного единичного входа;
wi – вес нейрона выходного слоя, идущий от i-го нейрона скрытого слоя.
В многовыходной стандартной нейросети прямого распространения (r > 1) соотношение (1) описывает работу каждого выхода. Схема многовыходной стандартной нейросети прямого распространения приведена на рисунке 1. [4].
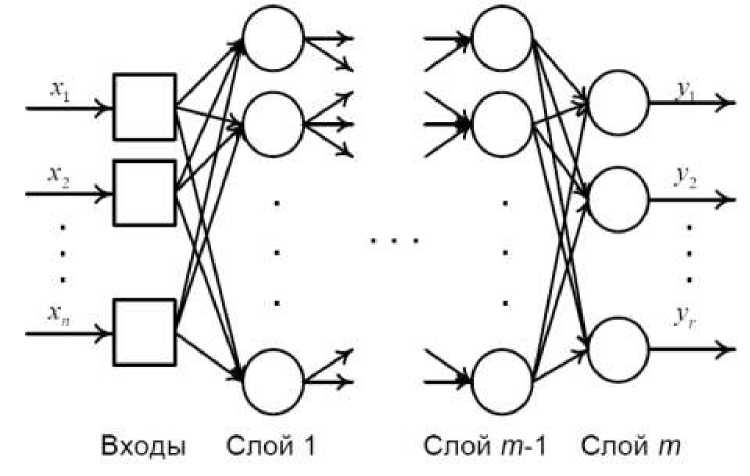
Рисунок 1. Многовыходная стандартная нейросеть прямого распространения.
Обучение нейронной сети производилось с помощью Neural Network Toolbox программной среды Matlab. Обучающее множество снято с модели электропривода постоянного тока при подаче на вход случайного сигнала. На рисунке 2 представлена нейросетевая модель двигателя постоянного тока. Для обучения использовался алгоритм Левенберга-Марквардта. Метод Левенберга-Марквардта - самый быстрый алгоритм обучения из всех, которые реализованы в пакете ST Neural Networks [3]. На 5 секунде подавался момент сопротивления. Результаты моделирования для двух величин ^Mtнапряжения задания представлены на графиках (Рис. 3).
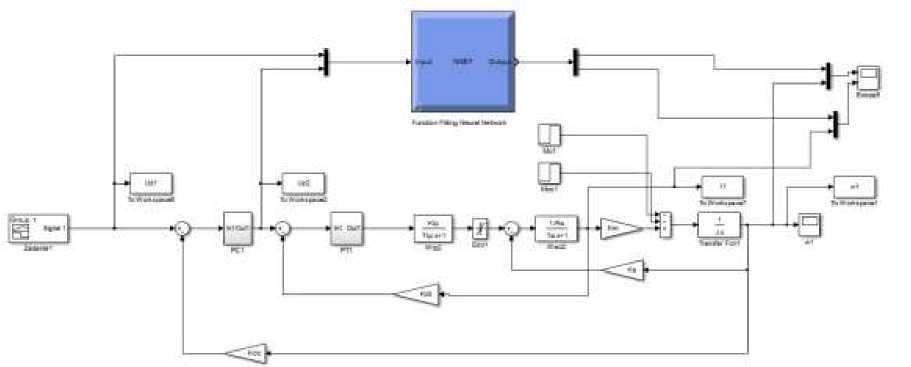
Рисунок 2. Нейросетевая модель ДПТ
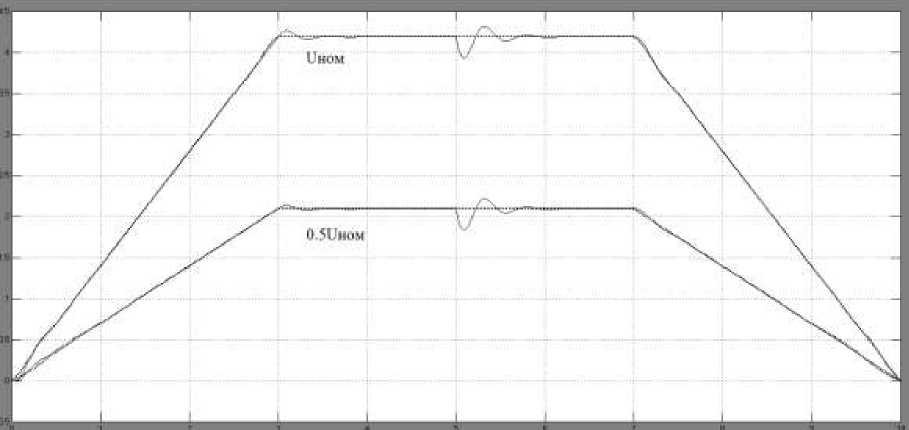
Рисунок 3. График сравнения скоростей модели электропривода и нейросетевой модели.
График сравнения тока нейросетевой модели и модели ДПТ представлен на рисунке 4.
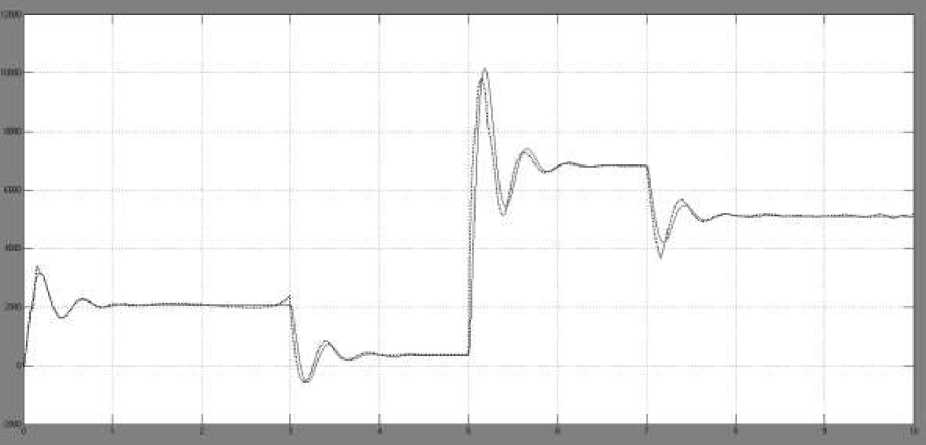
Рисунок4. График сравнения тока модели электропривода и нейросетевой модели.
Из представленных графиков видно, что нейронная сеть справляется с задачей идентификации, с высокой точностью повторяя динамику модели электропривода во всем диапазоне его работы.
Данный метод может быть применен к электроприводам любой сложности. Недостатком метода является необходимость после обучения модели проверки ее на адекватность новыми данными, не участвовавшими в обучении. Это связано с опасностью переобучения сети [6]. Эта проблема может быть решена программным контролем результата обучения перед применением.
Таким образом, применение нейронных сетей в качестве альтернативы существующим алгоритмам идентификации и построения линейных многомерных математических систем, вполне возможно.
Список литературы Идентификация электропривода постоянного тока с использованием интеллектуальных технологий
- Горбань А.Н. Обобщенная аппроксимационная теорема и вычислительные возможности нейронных сетей // Сибирский журнал вычислительной математики/РАН. Сибирское отделение. - Новосибирск, 1998. -Т.1,№1.-стр.11-24
- Колпаков А. Перспективы развития электропривода.//Силовая электроника. -№1-2004. -стр.46.
- Нейронные сети [электронный ресурс]. URL: http://tchsp.ru/h/biz/stat/49/modules/stneunet.html (дата обращения 03.04.2017)
- Сараев П.В. Идентификация нейросетевых моделей [Текст]: монография.-Липецк: Изд-во ЛГТУ, 2011.- 94 с.
- Фролов Ю.М. Состояние и тенденции развития электропривода//Современный электропривод.-№1.-2006.-стр.4.
- Хайкин С. Нейронные сети: полный курс, 2-е издание: Пер. с англ. - М.: Издательский дом «Вильямс». 2006. - 1104с
- Щеголькова Д.В., Орешкина Е.И., Липинский Л.В. О подходах к выбору структуры нейронной сети на примере многослойного персептрона // Актуальные проблемы авиации и космонавтики. №10.-2014. -стр.305-306.
