Идентификация параметров оптического потока в системах технического зрения в условиях помех измерения с неизвестными вероятностными характеристиками

Автор: Соколов С.В., Маршаков Д.В., Решетникова И.В.
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 1 т.26, 2026 года.
Бесплатный доступ
Введение. Методы обработки информации, содержащейся в изменении интенсивности оптического потока, регистрируемого в процессе движения объекта, широко востребованы в различных сферах деятельности: в космических исследованиях, технической диагностике, машинном (техническом) зрении, отслеживании объектов на цифровых изображениях, автономной навигации беспилотных объектов и др. В классе данных методов наибольшую эффективность на практике демонстрируют монокулярные методы оценки параметров собственного движения видеокамеры, как построенные на картографическом анализе подстилающей поверхности, так и использующие различные алгоритмы оценки параметров оптического потока (поля скоростей). Несмотря на то, что существующие алгоритмы оценки поля скоростей обладают такими преимуществами, как работоспособность при отсутствии карт местности и вычислительные затраты, легко реализуемые в бортовых процессорах, их применение на практике существенно осложнено неизбежными помехами оптических измерений, имеющих самую разную физическую природу и резко снижающих точность оценки параметров оптического потока. В связи с этим цель представленного исследования — решение задачи одновременной высокоточной оценки интенсивности оптического потока и идентификации его параметров в условиях помех измерения с неизвестными вероятностными характеристиками. Теоретическое решение данной задачи позволит сформировать оригинальный подход к синтезу робастных алгоритмов высокоточной обработки оптических потоков в системах видеомониторинга, что при практическом использовании данных алгоритмов обеспечит помехоустойчивость и требуемые точностные характеристики систем технического зрения, автономных навигационных систем беспилотных объектов и др. Материалы и методы. Решение основано на монокулярных методах определения собственного движения видеокамеры и минимизации регуляризованного квадратичного критерия. Его отправной точкой стала формулировка поставленной задачи как задачи стохастической оценки и параметрической идентификации дискретной линейной нестационарной системы при наблюдении ее вектора состояния в условиях помех с неизвестным вероятностным распределением. Синтез алгоритма оценки-идентификации в подобной постановке был реализован в виде процедуры, гарантирующей наивысшую точность в минимаксном смысле. Минимизация полученного минимаксного критерия позволила построить алгоритм оценки и параметрической идентификации оптического потока в виде устойчивой векторной рекуррентной процедуры, легко реализуемой в бортовых вычислителях подвижных объектов. Результаты исследования. Авторами решена задача одновременной высокоточной оценки интенсивности оптического потока и идентификации его параметров в условиях помех измерения с неизвестными вероятностными характеристиками, которая до настоящего времени не рассматривалась в научной литературе. Это решение позволит сформировать подход к синтезу робастных алгоритмов высокоточной обработки оптических потоков в системах видеомониторинга и обеспечить при практическом использовании помехоустойчивость и требуемые точностные характеристики систем технического зрения, автономных навигационных систем беспилотных объектов и др. Оценка возможности практического применения разработанного алгоритма оценки-идентификации параметров оптического потока была проведена в условиях негауссовских помех измерения путем численного моделирования. Несмотря на заданный высокий уровень помех измерения, погрешности оценки интенсивности оптического потока во всех протестированных координатных точках оказались как быстро сходящимися к стационарным значениям, так и весьма малыми в установившемся режиме (единицы процентов от максимального значения интенсивности оптического потока). Обсуждение. Полученные данные подтверждают, что предложенный алгоритм обладает такими преимуществами перед известными алгоритмами обработки оптического потока, как возможность оценивания интенсивности оптического потока и идентификации его параметров в условиях помех, вероятностные распределения которых априори неизвестны. Ему присущи высокая точность и устойчивость, и он не требует больших вычислительных затрат. Заключение. Практическая значимость разработанного алгоритма состоит, во-первых, в возможности высокоточной устойчивой обработки оптического потока в условиях неопределенного вероятностного характера помех измерения, во-вторых, в вычислительной эффективности разработанной процедуры оценки-идентификации. Это, в свою очередь, обеспечивает ее успешное использование при решении задач обработки оптической информации в системах машинного зрения, в задачах навигации автономных робототехнических комплексов, в космических исследованиях, технической диагностике и др.
Оптический поток, параметры оптического потока, помехи измерения, неопределенные вероятностные характеристики, регуляризация, квадратичный критерий
Короткий адрес: https://sciup.org/142247503
IDR: 142247503 | УДК: 681.7 | DOI: 10.23947/2687-1653-2026-26-1-2220
Optical Flow Parameter Identification in Vision Systems under Measurement Noise with Unknown Probabilistic Characteristics
Introduction. Methods for processing information contained in variations in the optical flow intensity during object motion are widely used in numerous technical applications, including space research, technical diagnostics, machine (technical) vision, object tracking in digital images, autonomous navigation of unmanned vehicles, etc. Among these methods, monocular techniques for estimating the parameters of the video camera own motion have demonstrated the greatest practical efficiency, both based on a cartographic analysis of the underlying surface and using various algorithms for estimating optical flow (velocity field) parameters. Although existing velocity field estimation algorithms offer advantages such as operability in the absence of terrain maps and computational costs easily implemented in onboard processors, their practical application is significantly complicated by the inevitable noise in optical measurements, which can have a wide variety of physical origins and reduce dramatically the accuracy of optical flow parameter estimation. Therefore, the objective of the research discussed in this paper is to address the problem of simultaneous high-precision estimation of the intensity of optical flow and identification of its parameters under conditions of measurement noise with unknown probabilistic characteristics. A theoretical solution to this problem enables the development of a new general approach to the synthesis of robust algorithms for high-precision optical flow processing in video monitoring systems. This, when applied in practice, will ensure noise immunity and the required accuracy characteristics for machine vision systems, autonomous navigation systems of unmanned vehicles, and other applications. Materials and Methods. The solution was obtained by monocular methods for determining the camera proper motion and minimizing a regularized quadratic criterion. The starting-point for the solution was the formulation of the problem as one of stochastic estimation and parametric identification of a discrete linear nonstationary system while observing its state vector under interference with an unknown probability distribution. The synthesis of the “estimation-identification” algorithm in this formulation was implemented as a procedure that guaranteed the highest accuracy in the minimax sense. Minimizing the resulting minimax criterion allowed us to construct an algorithm for estimating and parametrically identifying the optical flow as a stable vector recurrent procedure, easily implemented in onboard computers of moving objects. Results. The problem of simultaneous high-precision estimation of the optical flow intensity and identification of its parameters under measurement noise with unknown probabilistic characteristics is solved. This problem has not been considered in the scientific literature to date. The solution will enable the development of an approach to the synthesis of robust algorithms for high-precision processing of optical flows in video monitoring system. In practical use, it will ensure noise immunity and the required accuracy characteristics of machine vision systems, autonomous navigation systems of unmanned vehicles, etc. The assessment of the practical applicability of the developed algorithm for estimating and identifying optical flow parameters was performed under conditions of non-Gaussian measurement noise through numerical simulation. Despite the specified high level of measurement noise, the errors in estimating the optical flow intensity at all tested coordinate points proved to be both rapidly converging to steady-state values and very small in the steady-state mode (a few percent of the maximum value of the optical flow intensity). Discussion. The obtained data confirm that the proposed algorithm has such advantages over known optical flow processing algorithms as the ability to estimate the intensity of the optical flow and identify its parameters under noise conditions, whose probability distributions are a priori unknown. It is characterized by high accuracy and robustness, and it does not require high computational costs. Conclusion. The practical significance of the developed algorithm consists, firstly, in the possibility of high-precision stable processing of the optical flow under the conditions of uncertain probabilistic nature of measurement errors, and secondly, in the computational efficiency of the developed “estimation-identification” procedure. This, in turn, provides its successful practical application in solving optical information processing problems in vision systems, navigation of autonomous robotic systems, space exploration, technical diagnostics, and other fields.
Текст научной статьи Идентификация параметров оптического потока в системах технического зрения в условиях помех измерения с неизвестными вероятностными характеристиками
Введение. Методы обработки информации, содержащейся в изменении интенсивности оптического потока, регистрируемого в процессе движения объекта, широко востребованы в различных сферах деятельности: в космических исследованиях, технической диагностике, машинном (техническом) зрении, отслеживании объектов на цифровых изображениях, автономной навигации беспилотных объектов и др. В классе данных методов наибольшую эффективность на практике демонстрируют монокулярные методы оценки параметров собственного движения видеокамеры, как построенные на картографическом анализе подстилающей поверхности, так и использующие различные алгоритмы оценки параметров оптического потока (поля скоростей). Несмотря на то, что существующие алгоритмы оценки поля скоростей обладают такими преимуществами, как работоспособность при отсутствии карт местности и вычислительные затраты, легко реализуемые в бортовых процессорах, их применение на практике существенно осложнено неизбежными помехами оптических измерений, имеющих самую разную физическую природу и резко снижающих точность оценки параметров оптического потока. В связи с этим цель представленного исследования — решение задачи одновременной высокоточной оценки интенсивности оптического потока и идентификации его параметров в условиях помех измерения с неизвестными вероятностными характеристиками. Теоретическое решение данной задачи позволит сформировать оригинальный подход к синтезу робастных алгоритмов высокоточной обработки оптических потоков в системах видеомониторинга, что при практическом использовании данных алгоритмов обеспечит помехоустойчивость и требуемые точностные характеристики систем технического зрения, автономных навигационных систем беспилотных объектов и др.
Материалы и методы. Решение основано на монокулярных методах определения собственного движения видеокамеры и минимизации регуляризованного квадратичного критерия. Его отправной точкой стала формулировка поставленной задачи как задачи стохастической оценки и параметрической идентификации дискретной линейной нестационарной системы при наблюдении ее вектора состояния в условиях помех с неизвестным вероятностным распределением. Синтез алгоритма оценки-идентификации в подобной постановке был реализован в виде процедуры, гарантирующей наивысшую точность в минимаксном смысле. Минимизация полученного минимаксного критерия позволила построить алгоритм оценки и параметрической идентификации оптического потока в виде устойчивой векторной рекуррентной процедуры, легко реализуемой в бортовых вычислителях подвижных объектов.
Информатика, вычислительная техника и управление
Результаты исследования. Авторами решена задача одновременной высокоточной оценки интенсивности оптического потока и идентификации его параметров в условиях помех измерения с неизвестными вероятностными характеристиками, которая до настоящего времени не рассматривалась в научной литературе. Это решение позволит сформировать подход к синтезу робастных алгоритмов высокоточной обработки оптических потоков в системах видеомониторинга и обеспечить при практическом использовании помехоустойчивость и требуемые точностные характеристики систем технического зрения, автономных навигационных систем беспилотных объектов и др. Оценка возможности практического применения разработанного алгоритма оценки-идентификации параметров оптического потока была проведена в условиях негауссовских помех измерения путем численного моделирования. Несмотря на заданный высокий уровень помех измерения, погрешности оценки интенсивности оптического потока во всех протестированных координатных точках оказались как быстро сходящимися к стационарным значениям, так и весьма малыми в установившемся режиме (единицы процентов от максимального значения интенсивности оптического потока).
Обсуждение. Полученные данные подтверждают, что предложенный алгоритм обладает такими преимуществами перед известными алгоритмами обработки оптического потока, как возможность оценивания интенсивности оптического потока и идентификации его параметров в условиях помех, вероятностные распределения которых априори неизвестны. Ему присущи высокая точность и устойчивость, и он не требует больших вычислительных затрат.
Заключение . Практическая значимость разработанного алгоритма состоит, во-первых, в возможности высокоточной устойчивой обработки оптического потока в условиях неопределенного вероятностного характера помех измерения, во-вторых, в вычислительной эффективности разработанной процедуры оценки-идентификации. Это, в свою очередь, обеспечивает ее успешное использование при решении задач обработки оптической информации в системах машинного зрения, в задачах навигации автономных робототехнических комплексов, в космических исследованиях, технической диагностике и др.
Original Theoretical Research
Optical Flow Parameter Identification in Vision Systems under Measurement Noise with Unknown Probabilistic Characteristics
Sergey V. Sokolov 1,2 ® , Daniil V. Marshakov 2 © H , Irina V. Reshetnikova 2,3 ©
-
1 Rostov State University of Economics, Rostov-on-Don, Russian Federation
-
2 Moscow Technical University of Communications and Informatics, Moscow, Russian Federation
-
3 Don State Technical University, Rostov-on-Don, Russian Federation
Abstract
Introduction . Methods for processing information contained in variations in the optical flow intensity during object motion are widely used in numerous technical applications, including space research, technical diagnostics, machine (technical) vision, object tracking in digital images, autonomous navigation of unmanned vehicles, etc. Among these methods, monocular techniques for estimating the parameters of the video camera own motion have demonstrated the greatest practical efficiency, both based on a cartographic analysis of the underlying surface and using various algorithms for estimating optical flow (velocity field) parameters. Although existing velocity field estimation algorithms offer advantages such as operability in the absence of terrain maps and computational costs easily implemented in onboard processors, their practical application is significantly complicated by the inevitable noise in optical measurements, which can have a wide variety of physical origins and reduce dramatically the accuracy of optical flow parameter estimation. Therefore, the objective of the research discussed in this paper is to address the problem of simultaneous high-precision estimation of the intensity of optical flow and identification of its parameters under conditions of measurement noise with unknown probabilistic characteristics. A theoretical solution to this problem enables the development of a new general approach to the synthesis of robust algorithms for high-precision optical flow processing in video monitoring systems. This, when applied in practice, will ensure noise immunity and the required accuracy characteristics for machine vision systems, autonomous navigation systems of unmanned vehicles, and other applications.
Materials and Methods. The solution was obtained by monocular methods for determining the camera proper motion and minimizing a regularized quadratic criterion. The starting-point for the solution was the formulation of the problem as one of stochastic estimation and parametric identification of a discrete linear nonstationary system while observing its state vector under interference with an unknown probability distribution. The synthesis of the “estimation-identification” algorithm in this formulation was implemented as a procedure that guaranteed the highest accuracy in the minimax sense. Minimizing the resulting minimax criterion allowed us to construct an algorithm for estimating and parametrically identifying the optical flow as a stable vector recurrent procedure, easily implemented in onboard computers of moving objects.
Results . The problem of simultaneous high-precision estimation of the optical flow intensity and identification of its parameters under measurement noise with unknown probabilistic characteristics is solved. This problem has not been considered in the scientific literature to date. The solution will enable the development of an approach to the synthesis of robust algorithms for high-precision processing of optical flows in video monitoring system. In practical use, it will ensure noise immunity and the required accuracy characteristics of machine vision systems, autonomous navigation systems of unmanned vehicles, etc. The assessment of the practical applicability of the developed algorithm for estimating and identifying optical flow parameters was performed under conditions of non-Gaussian measurement noise through numerical simulation. Despite the specified high level of measurement noise, the errors in estimating the optical flow intensity at all tested coordinate points proved to be both rapidly converging to steady-state values and very small in the steady-state mode (a few percent of the maximum value of the optical flow intensity).
Discussion. The obtained data confirm that the proposed algorithm has such advantages over known optical flow processing algorithms as the ability to estimate the intensity of the optical flow and identify its parameters under noise conditions, whose probability distributions are a priori unknown. It is characterized by high accuracy and robustness, and it does not require high computational costs.
Conclusion. The practical significance of the developed algorithm consists, firstly, in the possibility of high-precision stable processing of the optical flow under the conditions of uncertain probabilistic nature of measurement errors, and secondly, in the computational efficiency of the developed “estimation-identification” procedure. This, in turn, provides its successful practical application in solving optical information processing problems in vision systems, navigation of autonomous robotic systems, space exploration, technical diagnostics, and other fields.
Введение. Стремительное внедрение беспилотных технологий обусловило взрывной рост мирового рынка беспилотных летательных аппаратов. Прогнозы указывают на его увеличение более чем в 3–4 раза к 2030 году. Например, по данным GlobalData 1 , рынок вырастет с 32,2 в 2024 году до 89,8 млрд долларов к 2030 году. Отчет Research Nester 2 , в свою очередь, дает еще более масштабный прогноз на долгосрочную перспективу — рост с 42,39 в 2025 году до 191,89 млрд долларов к 2035 году.
Информатика, вычислительная техника и управление
При этом объемы применения автономных систем в различных отраслях увеличиваются более чем на 10– 20 % ежегодно. Так, по данным Market Report Analytics 3 , на январь 2026 года рынок автономной сельскохозяйственной техники растет с совокупным среднегодовым темпом (CAGR) почти на 18,5 % при том, что сегмент автономных сельскохозяйственных роботов демонстрирует динамику в 18–20 %. Согласно прогнозам Fortune Business Insights и GM Insights 4 , рынок автоматизированной логистики и автономных мобильных роботов в 2025– 2026 годах вырастет на 12,8–17,9 %, а рынок автономного строительного оборудования, по оценкам The Business Research Company 5 , к 2026 году покажет стабильный рост CAGR почти на 9,1 %.
Столь интенсивное применение беспилотных технологий требует высокой точности систем автономной навигации, ключевую роль в которой играет оценка параметров собственного движения видеокамеры [1 –3] , сопряженных с линейными и угловыми скоростями беспилотного объекта [4, 5] , используемыми для определения его положения и ориентации в пространстве, вычисления траектории движения на основе анализа смещения пикселей в видеопотоке.
Тем самым обеспечиваются независимость от внешних датчиков и привязка к визуальным ориентирам на подстилающей поверхности (что критически важно, например, для точности зависания и посадки), мгновенное реагирование на изменения в движении аппарата, что наиболее значимо для высокоскоростных объектов, где малейшая ошибка в оценке собственного движения ведет к катастрофе. При этом требуемая погрешность определения параметров оптического потока [6, 7] для современных автономных объектов не превышает 1–2 %. Такие показатели точности позволяют удерживать траекторию в допустимых пределах на длинных дистанциях, выполнять безаварийный облет препятствий на высокой скорости, достигать стабильного положения в одной точке в режиме зависания без использования спутниковой навигации, что говорит о надежности функционирования в реальных, а не лабораторных условиях.
Достижение этого уровня точности требует продвинутых алгоритмов, устойчивых к шумам различного рода. В реальных же условиях измерения интенсивности оптического потока сопровождаются помехами с неизвестными вероятностными характеристиками, что существенно затрудняет идентификацию данных параметров, особенно в условиях искусственно созданных помеховых воздействий.
Современные подходы к идентификации оптического потока преимущественно ориентированы на оценку векторного поля скоростей в условиях известных помех. Так, стохастические методы, включающие в себя применение фильтров Калмана и байесовских оценок [8, 9] , требуют априорного знания характеристик помех, что снижает их практическую применимость. Робастные методы [10, 11] учитывают неопределенность, но не позволяют одновременно оценивать интенсивность и параметры поля скоростей.
Существующие монокулярные методы оценки параметров собственного движения видеокамеры условно могут быть разделены на методы картографического анализа подстилающей поверхности [12] и методы оценки параметров оптического потока (поля скоростей) [8] .
Методы картографического анализа подразумевают сравнение текущего кадра с хранящейся в памяти априорной картой, что требует предварительной геодезической разведки местности, значительных вычислительных ресурсов и делает их неприемлемыми для бортовой реализации.
В основе методов оценки параметров оптического потока лежит либо анализ особенностей изображения (например, выявлении особых точек или краев сцены [13] ), либо параметров потока по кадрам видеоизображения с применением математических моделей.
Базовым математическим выражением к построению алгоритмов оценки-идентификации оптического потока и его параметров u , v [2] является т. н. основное уравнение оптического потока [10] :
д I д I д I
+ u + v = д t д x д y
0 ,
где u ( x , y , t ), v ( x , y , t ) — текущие компоненты скорости яркостной картины в точке ( х, у ); ∂ I ( x , y , t ) , ∂ I ( x , y , t ) ,
∂ I ( x , y , t )
—
∂ y
частные производные функции яркости I ( x , y , t ) (интенсивности оптического потока) сканируемой сцены.
Отсутствие однозначного решения уравнения (1) относительно двух неизвестных переменных u , v привело к созданию целого ряда методов и алгоритмов, обеспечивающих требуемую точность только в конкретных практических ситуациях. Среди них наиболее распространены:
- градиентные методы, позволяющие в реальном времени вычислять вектор движения камеры на основе ана-
лиза градиентов интенсивности в каждом кадре;
-
- корреляционные методы, использующие прямой поиск похожих фрагментов среди соседних кадров с использованием функции корреляции или среднеквадратичного отклонения;
-
- вариационные методы, основанные на различных вариациях допущений о пространственно-временной ди
намике интенсивности оптического потока.
Основным подходом к построению этих алгоритмов является, как правило, введение различных ограничений, накладываемых на динамику изменения интенсивности оптического потока сканируемой подстилающей поверхности. Так, например, предположение об одинаковом смещении всех точек сканируемой поверхности при одновременной аппроксимации интенсивности окрестности каждого пикселя квадратичной формой обеспечивает заданную точность идентификации параметров оптического потока для низкоскоростного движения [4] , а дополнительное введение допущения о неизменной яркости сцены вдоль траектории движения объекта с использованием минимизации целевого функционала методом наименьших квадратов позволяет при малых смещениях повысить точность еще больше (метод Лукаса-Канаде) [3] . Более общим является предположение о «гладкости» оптического потока (об отсутствии резкого изменения поля скоростей), обеспечивающее с приемлемой для широкого ряда практических приложений точностью вычисление оптического потока на основе т. н. функционала энергии, предложенного Horn-Schunck [2] :
E ( u,v ) = J
D
+ д t
u
v
+ X (| V u |2 +|V v|2 ) dxdy ,
где D — область существования переменных x , y ; ∇ — оператор Гамильтона; λ — параметр регуляризации.
Но так как в данном методе используются алгоритмы оптимизации на основе или дискретных представлений интеграла и частных производных, или уравнений Эйлера-Лагранжа при граничных условиях с отражением, то вычислительные затраты такого подхода для бортовых вычислителей зачастую оказываются нереализуемыми [2] .
Проанализировав существующие методы оценки параметров оптического потока, можно резюмировать, что их основными недостатками являются, во-первых, большой объем вычислительных затрат, не позволяющий оценивать параметры оптического потока в реальном времени, а во-вторых, критичность к помехам измерения интенсивности оптического потока, неизбежным в реальных системах навигации.
Наличие подобных проблем говорит об отсутствии методического подхода, способного решать задачу совместной стохастической оценки интенсивности и идентификации параметров оптического потока в условиях неизвестных помех, что представляется существенным пробелом в научном знании.
Целью данной работы является решение задачи одновременной высокоточной оценки интенсивности оптического потока и идентификации его параметров в условиях помех измерения с неизвестными вероятностными характеристиками. Задачи исследования включают в себя:
-
1) создание алгоритма оценки-идентификации, способного работать без предварительного знания подстилающей поверхности;
-
2) обеспечение устойчивости и высокой точности оценки параметров оптического потока в условиях неизвестных помех;
-
3) реализацию метода, ориентированного на минимальные вычислительные затраты, делающие его пригодным для бортовой обработки данных.
Материалы и методы. Решение поставленных задач рассмотрено в системе координат изображения видеокамеры ( x , y ). Поскольку анализируемое изображение представляет собой матрицу пикселей, то, дискретизируя координатную плоскость, получаем основное уравнение оптического потока (1) в дискретной форме относительно координат сцены:
d I ( x i ,y i ,t ) d t
- u ( X 1 ,y 1 ,t )
I ( x I ,y I ,t ) --0
A x
- v ( x 1 ,У 1 ,t )
I ( x i ,У i ,t ) --0
A У
d I ( x 1 ,y 2 ,t ) I ( x 1 ,y 2 ,t ) I ( x 1 ,y 2 ,t ) - 1 ( x 1 ,y 1 ,t )
---= - u ( x 1 ,y 2 ,t ) - v ( x 1 ,y 2 ,t ) ;
dt Ax Ay dI (x1 ,y, ,t) dt
-
1 ( x 1 ,yt,t ) I ( x 1 ,yt,t ) - 1 ( x 1 ,y i - 1 ,t )
■ u ( x 1 ,y i ,t )------;-- v ( x 1 ,y i ,t )----------------;-----------------
A x A y

d t
I ( x 1 ,y n ,t ) I ( x 1 ,y n ,t )- I ( x 1 ,y n - 1 ,t )
■ u ( x 1 ,y N ,t )-----:-- v ( x 1 ,y N ,t )--------------:----------------
A x A y
d I ( x 2 ,y 1 ,t ) I ( x 2 ,y 1 ,t ) - I ( x 1 ,y 1 ,t ) I ( x 2 ,y 1 ,t )
---'—------ = - u ( x 2 ,y 1 ,t ) —----------■------- - v v ( x 2 ,y 1 ,t )
d t A x A y
d I ( x 2 ,y 2 ,t ) I ( x 2 ,y 2 ,t )- I ( x 1 ,y 2 ,t ) I ( x 2 ,y 2 ,t )- I ( x 2 ,y 1 ,t )
------ -------= - u ( x 2 ,y 2 ,t )---------------- v ( x 2 ,y 2 ,t ):-------------- d t A x A y
d I ( x 2 ,y i ,t ) d t
1 ( x 2 ,y i ,t )- 1 ( x 1 ,y i ,t ) 1 ( x 2 ,y , ,t )- 1 ( x 2 ,y , - 1 ,t )
■ u ( x 2 ,y i ,t )---------------;-- v ( x 2 ,y i ,t )----------------;------------------
A x A y
d I ( x 2 ,y N J ) I ( x 2 ,y N ,t )- I ( x 1 ,y N ,t ) I ( x 2 ,y N ,t )- I ( x 2 ,y N - 1 ,t )
------ -------= - u ( x 2 ,y n ,t )--------------;-- v ( x 2 ,y n ,t )---------------;---------------- d t A x A y
d I ( x j ,y 1 ,t ) I ( x j ,y 1 ,t ) - 1 ( x j - 1 ,y 1 ,t )
-----= - u (x j, y 1 ,t )^--------- dt Ax
-
I ( x j ,y 1 ,t ) v ( x j ,y 1 ,t ) *—
V ' A y
d I ( x j ,y i ,t ) I ( x j ,y i ,t ) - 1 ( x j - 1 ,y i ,t ) I ( x j ,y i ,t ) - 1 ( x j ,y i - 1 ,t )
—4;---= - u (xj ,yi ,t)^——^--------v (xj ,yi ,t)^-----^------- dt Ax Ay
d I ( x j ,y N ,t ) d t
1 ( x j ,y N ,t ) - 1 ( x j - 1 ,y N ,t ) 1 ( x j ,y N ,t ) - 1 ( x j ,y N - 1 ,t )
( x j , y N ,t ) —------------ v ( x j ,y N ,t ) —--------------------
A x A y
Информатика, вычислительная техника и управление
где j= 1,… N , ( x i ,y j ) — координаты ij -й точки в принятой системе координат; I ( x i ,y j ,t ) — текущая интенсивность оптического потока в ij -й точке; Δ x , Δ y — шаги пространственной дискретизации по осям Ох, Оу соответственно (размеры пикселя сканируемой сцены по соответствующим направлениям).
Для упрощения последующей записи введем следующие обозначения:
u ( X i ,y j ,t ) = U ij ,v ( X i ,y j ,t ) = V ij ,I ( X i ,y j ,t ) = I ij ,
|
I 11 — |
0......0 |
I 11 — |
0.... |
.. 0 |
|
Л х |
N 2 - 1 |
Л y |
--------V------- 1 N 2 - 1 |
|
|
0 |
- I 12 0......0 |
0 |
1 12 - 1 11 |
0......0 |
|
Л х |
Л y |
------V------ N 2 -2 |
||
|
D ( I ) = |
0......0 - I N 0......0 0......0 - 1 1 N 1 1 ( N - 1 ) 0......0 —— Л х —— —— Л y —— 00 - I 21 - 1 11 00 00 - I 21 00 —— Л х — — 1 —— Л y —— 0......0 - I 22 - 1 12 0......0 0......0 - I 22 - I 21 0......0 —— Л х —’—' —— Л y -—v—— N + 1 N 2 - N - 2 N + 1 У N 2 - N - 2 .................................................................. 0......0 - I 2 N ~ 1 1 N 0......0 0......0 - I 2 N ~ I 2 ( N - 1 ) 0......0 v — v — v — v — 2 N - 1 n 2 - 2 N 2 N - 1 ^y n 2 - 2 N |
|
0......0 - I j 1 I ( j - 1 ) 1 0......0 0......0 - j 0......0 -— Л х -— — Л y — N ( j - 1 ) N 2 - N ( j - 1 ) - 1 N ( j - 1 ) У N 2 - N ( j - 1 ) - 1 |
|
|
0......0 - I ji I ( j °i 0......0 0......0 - I ji I j ( i - 1 ) 0......0 -— - — — — N ( j - 1 ) + ( i - 1 ) Л х N 2 - N ( j - 1 ) - i N ( j - 1 ) + ( i - 1 ) Л y N 2 - N ( j - 1 ) - i |
|
|
0......0 - I j N I ( j - 1 ) N 0......0 0......0 - IJN I j ( N - 1 ) 0......0 — — Л х —— —— Л y — - - |
|
|
0......0 - IN 1 I ( N - 1 ) 1 0......0 0......0 - — 0......0 4---------— Ax 4--------- — 4---- V---- — Л у —---- V---- — N 2 - N N - 1 N 2 - N yy N - 1 |
|
|
0......0 - I N i I ( N - 1 ) i 0......0 0......0 - I N i I N ( i - 1 ) 0......0 N —— + i Л х — = r N —— + i Л y — = r |
|
|
0 0 - I NN I ( N - 1 ) N 0 0 - I NN I N ( N - 1 ) '—V—' Ax '—V—' Ay N 2 - 1 N 2 - 1 y |
Уравнение (2) представим в векторной форме:
— = D ( I ) dt v J
U V
При последующем синтезе алгоритма оценки-идентификации интенсивности оптического потока и его параметров будем использовать дискретное описание всех приведенных выше временных функций, что обусловлено цифровым характером обработки информации в бортовых вычислителях. В этом случае дискретная форма уравнения (3) принимает вид:
I k = I k - 1 +Л t • D ( I k - 1 )
U k - 1
Vk - 1
где I k — значение вектора интенсивности оптического потока в k -й момент времени ; U k , V k — значения векторов параметров оптического потока в k -й момент времени; Δ t — шаг временной дискретизации.
Обозначив для упрощения дальнейшего изложения вектор
U k
V k
как ξ k , k = 1… N , ξ 0 = 0, полученное дискрет-
ное уравнение запишем в виде:
I k = I k - 1 +Л t • D ( I k - 1 ) ^ k - 1 .
В каждой ij -й точке сканирования интенсивность оптического потока измеряется с погрешностью w ij , вероятностные характеристики которой (в частности, вид плотности распределения) в общем случае неизвестны. Вводя аналогично вышеизложенному вектор помех измерений W k,
Z k = I k + W k •
Таким образом, задача оценки интенсивности оптического потока и идентификации его параметров в используемых определениях представляет собой задачу стохастической оценки и параметрической идентификации дискретной линейной нестационарной системы (4) при наблюдении ее вектора состояния в условиях помех с неопределенной плотностью вероятностного распределения.
Важно отметить, что применение традиционных методов дискретного оценивания, в частности калмановской фильтрации, здесь невозможно из-за, во-первых, наличия неизвестного вектора параметров ξ k , а, во-вторых, из-за неопределенности вероятностного распределения помехи измерения W k [14] .
Полагая, что в рассматриваемой задаче вероятностное распределение помехи измерения интенсивности оптического потока относится к классу распределений с ограниченными квадратами в силу ограниченной мощности реальных помех [14], оценку интенсивности оптического потока Îk при одновременном определении вектора параметров ξk будем искать как оценку, гарантирующую наивысшую точность оценивания в минимаксном смысле (т. е. минимальную ошибку в наиболее неблагоприятной ситуации, определяемой заданным классом распределения), выбирая в качестве минимизируемой целевой функции квадратичную: [Zk – Îk]T[Zk – Îk]. Для обеспечения устойчивости разрабатываемого алгоритма при формировании критерия оптимальной оценки (Îk)-иден-тификации (ξk) используем регуляризующие аддитивные составляющие: по Тихонову по норме L2 — α⋅ξkT∆ξk и учитывающую естественное ограничение на непрерывность изменения вектора параметров ξk во времени: β⋅∆ξkT∆ξk, ∆ξk = ξk – ∆ξk–1, где α, β — параметры регуляризации, обеспечивающие адаптацию к конкретным усло- виям эксплуатации динамической системы.
В соответствии с изложенным минимаксный критерий оптимальности J k сформулируем в следующем виде:
[ T T
Z k - 1 k ] Т [ Z k - 1 k ] + a^ k - 1 ( I k ,I k - 1 ) ^ k - 1 ( I k ,I k - 1 ) + в •A ; k - 1 ( I k ,I k - 1 ) \ - k - 1 ( I k ,I k - 1 ) ,
( i i
I k ,I k - 1
) = ^ k - 1 ( I k ,I k - 1 ) - ^ k - 2 ( I k - 1 ,I k - 2 ) .
Для последующего определения вектор-функции ξ k –1( I ̂ k , I ̂ k –1), определяющей текущую оценку интенсивности оптического потока I ̂ k :
Ik = Ik-1 +At • D (Ik-1) ^ k-1,(6)
продифференцируем J k (5) по ξ k –1 :
Информатика, вычислительная техника и управление
dj. d (I Z k - Ik I Т1 Zk - Ik I) diT
Jr- = - [-----r ] [ dIr- + 2“^TT-1 (Ik,Ik-1) + 2в[^k-1 (Ik,Ik-1)-^k-2 (Ik-1 ,Ik-2)| = d^ k-1 d [ Zk - Ik ] d^ k-1 v [ v v/
= -2 [ Z k - I k ] Т A t D ( I k - 1 ) + 2 ( a + в ) ^ T - 1 ( ik I - 1 ) - 2в^ T - 2 ( I k - 1 ,I k - 2 ) •
Приравнивая полученное выражение к 0, приходим к равенству:
[Zk - Ik ] ТAtD (Ik-1 ) + КT-2 (Ik-1 ,Ik-2 ) = (a + в)^T-1 (ik ,Ik-1 ) , из которого определяем искомую рекуррентную вектор-функцию ξk–1(Îk, Îk–1):
— DТ (Ik_ , ) [ Zk - Ik ] + ~^^k_2 (Ik,Ik_ 2 ) = ^k_Ah ,Ik_ j . P k 1 k k k 2 k 1 k 2 k 1 k k 1
a + в
Подставляя найденное выражение ξ k –1( I ̂ k , I ̂ k –1) в уравнение оценки (6), имеем:
Ik = Ik_ ; + AtLD(It_ Ad т iik_} Zz- - AALD(Ik_ Ad Т [ikAik + ^ ^ D(Ik_A^k. 2(4 -i , 4_ A k k 1 k 1 k 1 k k 1 k 1 k k 1 k 2 k 1 k 2
a + в a + в a + в
Так как правая часть полученного уравнения зависит от текущей оценки, I ̂ k , то для окончательного определения I ̂ k преобразуем его следующим образом:
I Л/2 \1л Л/2
I E +— D ( I k - 1 ) )D Т ( I k - 1 ) I I k = I k - 1 +— D ( I k - 1 ) D Т ( I k - 1 ) Z k +— в D ( I k - 1 ) ^ k - 2 ( I k - 1 ,I k - 2 ) ,
^ a + в J a + в a + в где E — единичная матрица размерности N2, откуда окончательно имеем стохастическую оценку интенсивности оптического потока Îk :
-
2 Л 12
Iк = I E + -A— D(Ik_Ddт (ik_J I J Ik_J + -A—d!I \dt p Jz + d!I v p I U,(7)
k k 1 k 1 k 1 k 1 k 1 k k 1 k 2 k 1 k 2
^ a + p J [ a + pa где идентификация вектора параметров оптического потока ξk–2(Îk, Îk–1) осуществляется в соответствии с выражением:
DT (Ik—2) [Zk—1 — Ik—1 ] + k—3 = 5k—2.(8)
a + в a + в
Преимущественными особенностями алгоритма оценки-идентификации (7), (8) являются, во-первых, возможность построения поля скоростей не только для любого из участков сцены изображения, но и для всей сканируемой сцены, а, во-вторых, относительно небольшие вычислительные затраты, обусловленные определением векторной рекурсии вместо реализации многомерных алгоритмов нелинейной оптимизации в известных методах.
Оценка эффективности предложенного подхода была получена в ходе серии численных экспериментов с разнообразными нелинейными функциями и различными значениями среднего и дисперсии распределения Лапласа, совокупность результатов которых позволила выявить устойчивую тенденцию. В качестве иллюстрации используем один из характерных сценариев.
Моделирование пространственно-временного изменения интенсивности оптического потока I ( x , y , k ) осуществлялось в координатной сетке { х :[0;5], y :[0;5]} с равномерным шагом, равным 0,5, на временн о м интервале [0;600] секунд с шагом Δ t = 0,1 с в соответствии с выражением:
I ( x,y,k ) = 0 , 33 e -( x — 2 ' 7 ) 2 —( y — 2 ' 7 ) 2 ( cos ( 0 , 9 k A t ) + 1 ) лм . (9)
Формирование вектора помех измерений W k осуществлялось на основе моделирования пространственно-временного случайного поля, описываемого как
G (x,y,k) = (cos (1, 3 x) cos (0, 97 y) sink At +1) Lt, где Lt — случайная последовательность с распределением Лапласа с нулевым средним и дисперсией D = (8,7 ⋅ 10–2)2 (лм)2.
Оценка интенсивности оптического потока Iˆ k проводилась в реальном масштабе времени в соответствии с алгоритмом (7) при параллельной реализации процедуры идентификации (8) вектора параметров оптического потока ξ k при значениях коэффициентов регуляризации α = 0,033, β = 0,0017. Анализ точности алгоритма оценки-идентификации (7), (8) производился путем сравнения значений вектора оценки интенсивности оптического потока I ̂ k с истинными значениями интенсивности оптического потока, определяемыми выражением (9).
На рис. 1, 2 представлены графики изменения параметров оптического потока u , v , характерных для выбранного пространственно-временного изменения интенсивности оптического потока (9) и приведенных для точки { х= 4, y= 3}, а на рис. 3, 4 — графики ошибок при оценке компонентов вектора интенсивности оптического потока для двух произвольно выбранных точек координатной сетки { i , j }: {1,4},{5,2}.
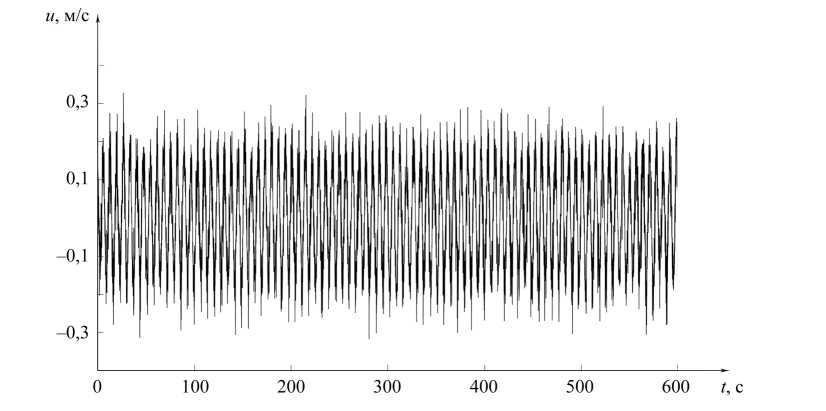
Рис. 1. График изменения параметра оптического потока u
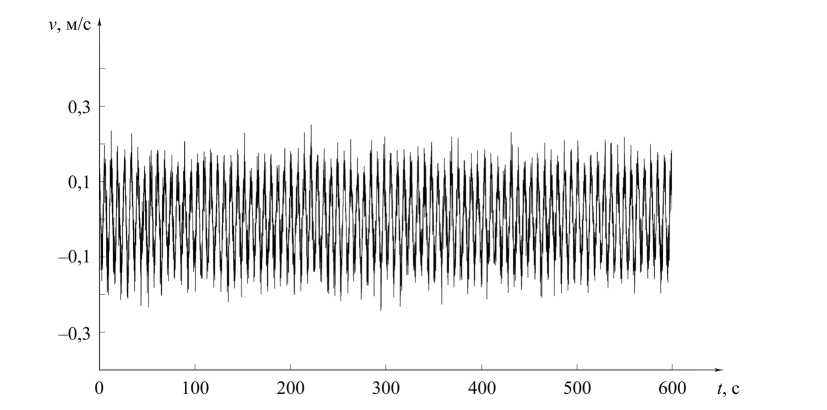
Рис. 2. График изменения параметра оптического потока v
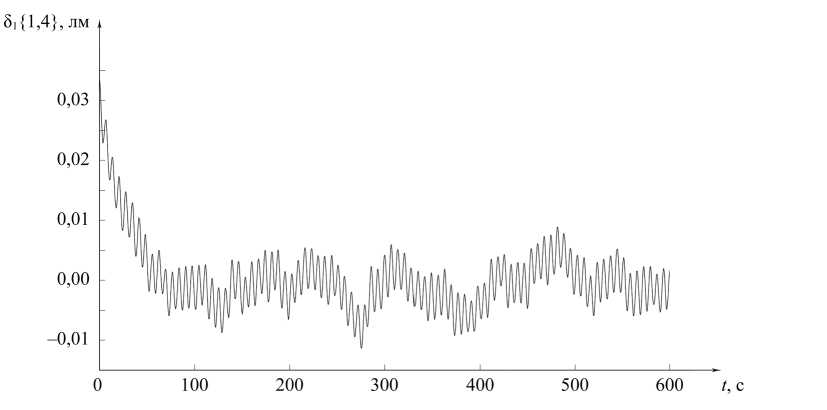
Рис. 3. График ошибок при оценке интенсивности оптического потока в координатной точке {1,4}
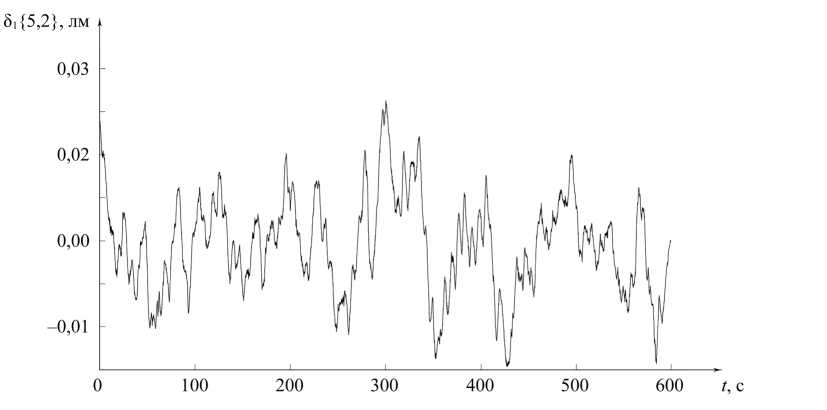
Рис. 4. График ошибок при оценке интенсивности оптического потока в координатной точке {5,2}
Приведенные результаты позволяют сделать вывод о том, что, несмотря на достаточно большой уровень помех измерения, погрешности оценки интенсивности оптического потока во всех протестированных координатных точках оказались, во-первых, быстро сходящимися к стационарным значениям, а, во-вторых, в установившемся режиме весьма малыми: в точке {1,4} — не более 0,7 % от максимального значения интенсивности оптического потока I k , в точке {5,2} — не более 2,1 %.
Информатика, вычислительная техника и управление
Для анализа вычислительной эффективности разработанного алгоритма была проведена сравнительная оценка вычислительных затрат с методом Лукаса-Канаде [3] , для которого вычислительные затраты оказались в 6,7 раза выше.
Результаты исследования . Таким образом, можно заключить, что основная цель работы, состоящая в разработке метода, решающего ранее не рассматриваемую в литературе задачу одновременной стохастической оценки интенсивности оптического потока и идентификации его параметров в условиях помех измерения с неизвестными вероятностными характеристиками, достигнута. Основными результатами работы являются:
-
- алгоритм оценки-идентификации, реализующий комплексный подход к оценке параметров оптического потока и отличающийся от уже известных ранее рекуррентной структурой с регуляризационными ограничениями;
-
- устойчивые оценки параметров u ( x , y , t ), v ( x , y , t ) оптического потока с уровнем погрешности не более 2,1 % в условиях неполной априорной информации без точных сведений о распределении помех и характеристиках подстилающей поверхности;
-
- эффективная алгоритмическая реализация метода, обеспечивающая снижение вычислительных ресурсов до 17 % (более чем в шесть раз) от затрат известных градиентных методов.
Обсуждение. Полученные результаты подтверждают целесообразность применения метода одновременной оценки интенсивности оптического потока и идентификации его параметров в условиях неизвестных помех. Предложенное решение позволяет обеспечить устойчивость оценки параметров оптического потока даже при отсутствии точной информации о вероятностных характеристиках помех, что особенно важно в условиях реальных наблюдений, когда помехи измерения имеют неизвестные характеристики и традиционные методы оказываются неприменимы.
Практическая значимость решения состоит в отсутствии необходимости предварительной геодезической разведки местности и обеспечении высокой точности и устойчивости оценки параметров оптического потока в условиях неизвестных помех, что согласуется с теоретическими предпосылками, указанными в работах [10, 11] . Вычислительная эффективность предложенного алгоритма соответствует теоретическим ожиданиям, а его рекуррентная структура обеспечивает минимальные вычислительные затраты, что делает его пригодным для бортовой реализации в условиях ограниченных ресурсов, подтверждая корректность предложенного подхода.
Особенность алгоритма — реализация минимаксного критерия оптимальности, который обеспечивает наивысшую точность оценивания в наиболее неблагоприятной ситуации, определяемой заданным классом распределения помех. Важным элементом является использование регуляризации по Тихонову и учет ограничений на непрерывность изменения вектора параметров во времени, что позволяет алгоритму адаптироваться к изменяющимся условиям наблюдения. Вместе с тем, использование данных регуляризующих составляющих и ограничений на непрерывность изменения параметров требует подбора и предварительной оценки коэффициентов регуляризации, что может несколько увеличить вычислительные затраты.
Заключение . Состоятельность предложенной концепции практически доказывают проведенные численные эксперименты с разнообразными нелинейными функциями, различными значениями среднего и дисперсии распределения Лапласа, включая описанный в работе частный случай с фиксированными условиями помех и ограниченным числом точек. Перспективы дальнейших исследований в данном направлении включают в себя тестирование предложенных решений на реальных наборах данных [15] , расширение фреймворка синтеза алгоритма для практической реализации в конкретные системы автономной навигации, требующие высокоточной и устойчивой оценки параметров оптического потока, включая космические исследования, машинное зрение [16] и техническую диагностику.
Список литературы / References
