Имитационная математическая модель построения двумерных радиолокационных изображений воздушных объектов в интересах оценки качества распознавания

Автор: Бердышев В.П., Миронов А.М., Помазуев О.Н., Савельев А.Н., Копылов В.А., Лой В.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Статья в выпуске: 7 т.11, 2018 года.
Бесплатный доступ
В настоящее время задача распознавания целей вызывает повышенный интерес, особенно у разработчиков систем управления воздушным движением и противовоздушной обороны. Статья посвящена разработке имитационной математической модели построения двумерных радиолокационных изображений воздушных объектов в интересах оценки качества распознавания в обзорных РЛС. Предложенная имитационная математическая модель построения двумерных радиолокационных изображений воздушных объектов позволяет проводить всесторонние исследования портретов 19 типов воздушных объектов зарубежного и российского производства при изменении ракурсов локации, характера и параметров траекторных нестабильностей полета, отношения сигнал/шум, параметров зондирующих сигналов РЛС с учетом ошибок измерения радиальной скорости и дальности до цели. Показано, что в условиях отсутствия дестабилизирующих факторов (неравномерности поворота, радиального перемещения, наличия шумов и помех и т. п.) формируемое двумерное радиолокационное изображение воздушных объектов адекватно отражает структуру цели. Полученные результаты могут быть использованы при разработке и оценке качества систем распознавания классов и типов воздушных объектов по сигнальным признакам в существующих и перспективных РЛС.
Аzimuthal portrait, алгоритм, распознавание, радиолокационный портрет, дальностный портрет, азимутальный портрет, двумерное радиолокационное изображение, инверсное синтезирование апертуры, многочастотный зондирующий сигнал, вероятность распознавания
Короткий адрес: https://sciup.org/146279544
IDR: 146279544 | УДК: 621.396.69 | DOI: 10.17516/1999-494X-0090
Imitation mathematical model of construction of two-dimensional radar-image images of air objects in interest of assessment of quality of recognition
Currently, the task of target recognition is of increasing interest, especially among developers of air traffic control and air defense systems. The article is devoted to the development of an imitative mathematical model for the construction of two-dimensional radar images of airborne objects in the interest of assessing the quality of recognition in survey radars. The proposed simulation model for constructing two-dimensional radar images of airborne objects makes it possible to carry out comprehensive studies of portraits of 19 types of airborne objects of foreign and Russian production with a change in the angles of location, the nature and parameters of the flight instabilities of flight, the signal-to-noise ratio, the parameters of the radar probing signals, and range to the target. It is shown that in the absence of destabilizing factors (uneven rotation, radial displacement, presence of noise and noise, etc.), the two-dimensional radar image of air objects being formed adequately reflects the structure of the target. The obtained results can be used in developing and assessing the quality of systems for recognizing classes and types of air assets based on signaling characteristics in existing and prospective radars.
Текст научной статьи Имитационная математическая модель построения двумерных радиолокационных изображений воздушных объектов в интересах оценки качества распознавания
языке которых производятся как априорные описания классов ВО, так и апостериорное описание распознаваемых объектов. Связано это с тем, что рабочий словарь признаков определяет состав и технические характеристики измерительных средств системы распознавания, в данном случае РЛС, которые считаются наиболее ресурсоемкими элементами системы. Решение задачи распознавания и идентификация целей по их изображениям, в том числе и по радиоло -кационным, зависит от возможности выделения на изображении характерных признаков объекта наблюдения. Такими признаками объектов служат пространственные признаки (размер и форма объекта), а также яркостные признаки. Для увеличения числа распознаваемых классов целей и повышения достоверности получаемой информации необходимо увеличивать количество информативных признаков и соответствующие вычислительные ресурсы на их обработку [1-4, 8, 9].
В настоящее время значительное распространение получили цифровые методы моделирования вторичного излучения реальных воздушных целей с использованием компьютерной техники. Однако результаты, полученные при имитационном моделировании, должны уточняться в ходе натурных экспериментов. Как показывают исследования, степень совпадения результатов моделирования и натурных экспериментов при узкополосном зондировании для ЭПР составляет 0–2,5 дБ, для угловых и частотных корреляционных функций с точностью до 10–30 % (в зависимости от типа цели). Например, коэффициенты корреляции ДП при ЛЧМ-зондировании, полученные при моделировании и экспериментально, составили 0,88–0,97. Полученные результаты подтверждают целесообразность применения имитационного математического моделирования для исследований отражений радиоволн от ВО [4, 5]. В связи с этим в настоящей работе распознавание классов (типов) ВО предлагается проводить статистическими методами с использованием признаков, извлеченных из ДРЛИ. Указанные признаки должны отвечать следующим требованиям: наиболее полно характеризовать как геометрические, так и отражательные особенности ВО; не вызывать сложностей при определении их численных значений; обеспечивать вероятность распознавания целей в рамках принятого алфавита классов не ниже заданной.
Наиболее исследованными и отвечающими указанным требованиям признаками распознавания по ДРЛИ являются:
-
• количество разрешаемых рассеивающих центров (РЦ) в изображении;
-
• плотность расположения РЦ; максимальное расстояние между наиболее удаленными РЦ;
-
• сумма расстояний между всеми РЦ;
-
• усредненное расстояние между РЦ;
-
• площадь ВЦ, аппроксимированная кругом.
Результаты распознавания (оценки вероятностей) при использовании этих признаков достаточно высоки, однако они получены при следующих ограничениях [6, 7]:
-
• значения курсовых углов полета целей выбирались не менее 30°;
-
• отсутствовал учет возможных затенений РЦ крупными элементами конструкции планера;
-
• отсутствовал учет искажений, связанных с проявлением ТН полета, или возникающих ошибок их компенсации при угловых скоростях рысканий более 0,5°/с;
-
• отсутствовал учет ошибок измерения радиальной скорости, дальности до цели и др.
При решении задач распознавания целей по их ДРЛИ для получения адекватных оценок перечисленные выше факторы и условия должны быть обязательно учтены.
Порядок получения и анализа характеристик радиолокационных портретов (РЛП) ВО (дальностного, азимутального, двумерного и трехмерного) приведен в многочисленных публикациях, относящихся к теории распознавания, например [1-4, 6, 7].
Цель статьи - предложить имитационную математическую модель построения двумерных радиолокационных изображений воздушных объектов в интересах оценки качества распознавания.
В соответствии с целевым назначением к имитационной математической модели (ИММ) предъявлялись следующие требования: возможность проведения исследований при любых ракурсах локации; возможность имитации движения цели по различным траекториям (высота, скорость, дальность) при наличии помех и внутренних шумов приемника различного уровня.
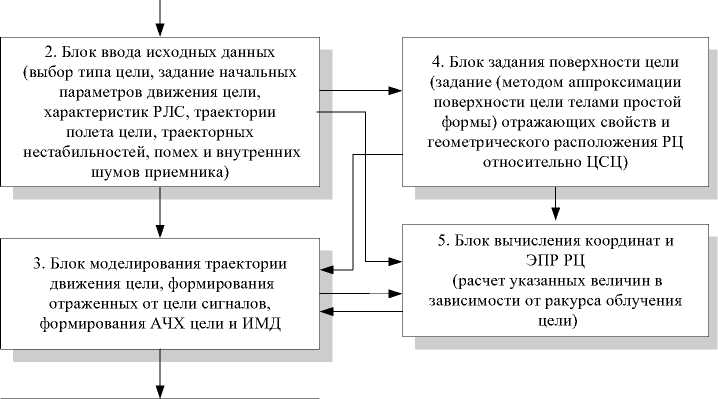
Рассмотрим назначение каждого блока ИММ и содержание проводимых в них операций (рис. 1).
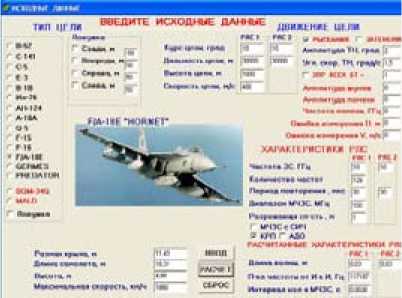
Блок 1 (заставка), вид которой показан на рис. 2 а .
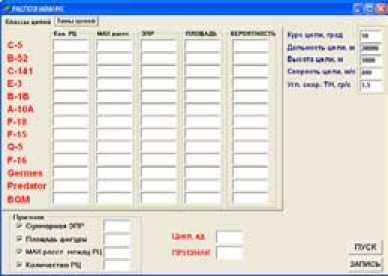
Блок 2 предназначен для выбора типа цели, задания начальных параметров движения цели, характеристик РЛС, траектории полета цели, траекторных нестабильностей, помех и внутренних шумов приемника. В этот блок вводятся следующие начальные данные (рис. 2 б ): тип цели; значения параметров траектории движения цели для РЛС (курс цели, наклонная дальность до цели, высота цели, скорость цели, амплитуда и угловая скорость рысканий); значения параметров РЛС: несущая частота, количество частот многочастотного зондирующего сигнала (МЧЗС), диапазон перестройки частоты, период повторения импульсов, время инверсного радиолокационного синтезирования апертуры (ИРСА), амплитуда внутренних шумов приемника. Исходные и рассчитанные данные из этого блока поступают в блок 3.
В блоке 3 (моделирование траектории движения цели) моделируется полет ВО в турбулентной атмосфере, т.е. рассчитываются координаты ВО относительно РЛС и углы, определяющие положение ВО в пространстве. Полет ВО имитируется в связанной с РЛС прямоугольной системе координат 0XYZ с осями 0X и 0Z, расположенными в горизонтальной плоскости (рис. 3).
Начало отсчета системы координат 0XYZ совпадает с точкой стояния РЛС. Геометрические и отражательные особенности цели определяются в подвижной системе координат oxyz, связанной с ЦСЦ ВО. Ось ox направлена вдоль фюзеляжа в сторону, противоположную линейной скорости цели, ось oz – по размаху крыла перпендикулярна оси ox , а ось oy составляет с остальными осями правую ортогональную систему координат. Ее ориентация и положение в пространстве относительно системы координат 0XYZ определяются координатами Х0, Y0, Z0, углами рыскания – ψ, тангажа – ϑ и крена – ξ. Угол ψ определяет поворот ВО в плоскости X0Z, угол 9 - в плоскости X0Y , угол ^ - в плоскости Z0Y.
При полете ВО в турбулентной атмосфере возникают ТН. Определяющее влияние на флюктуации ЭПР оказывают рыскания ВО (табл. 1). Максимальные спектральные плотности угловой скорости рысканий составляют величину порядка 4–4,5○/с.
1. Заставка
6. Блок вычисления коэффициентов корреляции одночастотных выборок отраженных сигналов, угловой скорости ТН
-
7. Блок проведения БПФ, формирования ММСР, дальностных, азимутальных портретов и ДРЛИ целей
-
8. Блок распознавания и статистических исследований ДРЛИ (построения гистограмм)
Рис. 1. Структурная схема имитационной математической модели
Fig. 1. Block diagram simulation mathematical model
Таблица 1. Влияние на флюктуации эффективной поверхности рассеяния рысканий воздушных объектов
Table 1. The effect on the fluctuations of the effective scattering surface of airborne objects
|
Режим управления самолетом |
Аэродинамическая характеристика, град |
||
|
σ ϑ (тангаж) |
σ ξ (крен) |
σ ψ (рыскания) |
|
|
Летчик |
0,82 |
3,43 |
3,52 |
|
Автопилот с корректором высоты |
0,99 |
0,67 |
0,37 |
|
Автопилот без корректора высоты |
1,28 |
0,85 |
0,53 |
*
σ – среднеквадратическое отклонение величины угла.

а)
в)
г)
Рис. 2. Вид интерфейса ввода исходных данных заставки (а), (в) и радиолокационных портретов воздушных объектов B-52 b F/A-18E (б), (г)
Fig. 2. View of the interface for input of the initial data of the screen saver (а), (в) and radar portraits of air objects B-52 b F/A-18E (б), (г)
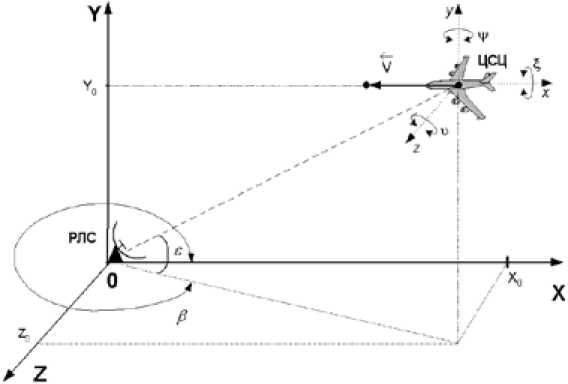
Рис. 3. Система координат при моделировании движения цели
-
Fig. 3. Coordinate system modeling traffic goals
Для задания траектории ВО выберем следующие значения параметров движения:
у = A • sin(Y • t+ф0), 9 = 0, ^ = 0, V = Vo = const, X = X0±Vt, Y = Yo, Z = Zo, где ф о — начальная фаза угла рысканий.
Таким образом, в блоке 3 рассчитываются координаты ВО относительно РЛС и углы, определяющие положение ВО в пространстве.
В блок 4 (задания поверхности цели, согласно [5]) из блока 2 (исходных данных) поступает информация о типе выбранной цели. В блоке 4 содержится описание поверхности цели совокупностью расположенных определенным образом в пространстве тел простой формы. Информация представляет собой перечень элементов, составляющих поверхность ВО: геометрические размеры тел простой формы; исходные значения для расчета их ЭПР; начальные координаты, определяющие положение РЦ на поверхности ВО, углы видимости РЦ и координаты вершин экранов затенения.
В блок 5 (вычисления координат и ЭПР РЦ) из блока 2 поступают заданные характеристики РЛС. Из блока 3 - координаты ВО относительно РЛС и углы, определяющие положение ВО в пространстве. Из блока 4 - описание совокупности расположенных определенным образом в пространстве тел простой формы. На основе поступивших данных методом аппроксимации поверхности цели телами простой формы проводится расчет координат и ЭПР каждого РЦ на основе выражений, зависящих от вида аппроксимирующего тела. Затем ЭПР РЦ (тел простой формы) и их координаты пересчитываются в систему координат РЛС с учетом траектории полета и углового положения цели относительно РЛС. Рассчитанные в соответствии с ракурсом координаты и ЭПР РЦ поступают в блок 3. В этом блоке рассчитываются значения амплитуд и фаз, отраженных от ВЦ сигналов путем векторного сложения отражений от РЦ. По рассчитанным значениям амплитуд и фаз формируется КЧХ цели, ИМД и одночастотные выборки отраженных сигналов.
В блок 6 (вычисления коэффициентов корреляции, оценки угловой скорости ТН) из блока 3 поступают иммитационная матрица данных (ИМД) и одночастотные выборки отраженных сигналов РЛС. С полученными данными проводится корреляционный анализ.
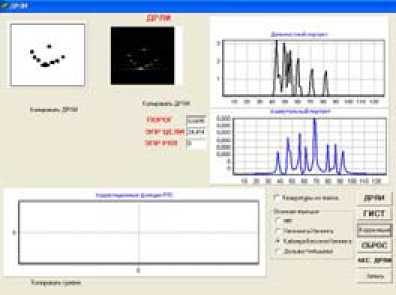
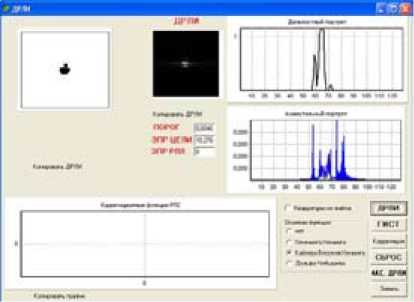
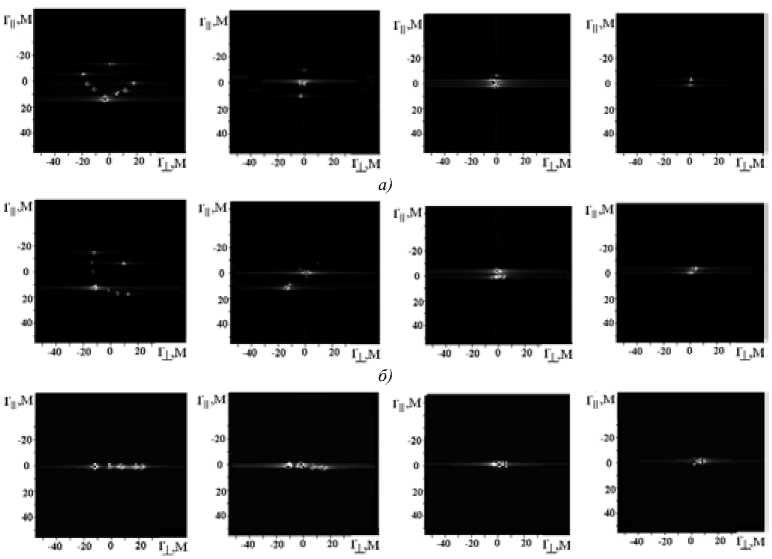
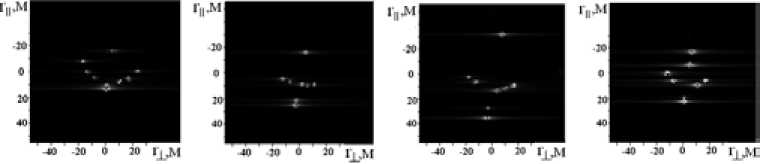
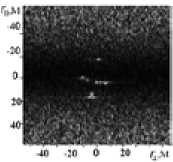
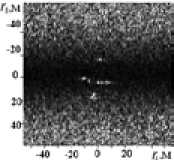
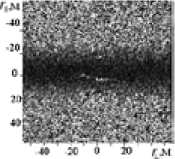
В блоке 7 (проведения БПФ, формирования ММСР, ДП, АП и ДРЛИ целей) формируется матрица многочастотно-синтезированного рассеяния (ММСР), проводится двумерное быстрое преобразование Фурье (БПФ). В результате формируются дальностные портреты (ДП) и азимутальные (АП), ДОР и ДРЛИ цели (рис. 2 г ). На рис. 4 представлены ДРЛИ B-52, B-1B, F-18E и Predator при ракурсе q=10º (а), 50º (б) и 90º (в) соответственно, а на рис. 5 – ДРЛИ B-52, С-141, С-5 и Е-3 при ракурсе 10º (а) и 50º (б).
В блок 8 (распознавания и статистических исследований ДРЛИ) из блока 7 поступают значения, выражающие собой ММСР, на основе которых производится распознавание цели и построение гистограмм распределения (рис. 6).
Изучение особенностей различных признаков позволило для проведения дальнейших исследований и получения оценок распознавания предложить следующую признаковую совокупность (рис. 4 и 5): площадь многоугольной фигуры, образованной ДРЛИ, – S; количество разрешаемых РЦ на ДРЛИ – М; расстояние между наиболее удаленными РЦ – R; ЭПР как сумма ЭПР всех РЦ – σ.
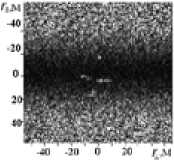
ИММ позволяет проводить оценку качества ДРЛИ. На рис. 7 представлены ДРЛИ цели С-141 при ракурсе q=10º при отношении сигнал/шум: 4 дБ, 2 дБ, 0 дБ и -2дБ соответственно – 770 –
в)
Рис. 4. Двумерные радиолокационные изображения B-52, B-1B, F-18E и Predator при различном ракурсе
Fig. 4. Two-dimensional radar images of the B-52, B-1B, F-18E and Predator at different perspective
а)
в)
Рис. 5. Двумерные радиолокационные изображения B-52, С-141, С-5 и Е-3 при различном ракурсе
Fig. 5. Two-dimensional radar images of the B-52, С-141, С-5 and the Е-3 with a different perspective

а)
Рис. 6. Вид интерфейса построения гистограмм (а) и распознавания классов и типов воздушных объектов (б)
б)
Fig. 6. View of the interface for constructing histograms (a) and recognizing the classes and types of air objects (б)
а)
б)
в)
г)
Рис. 7. Двумерные радиолокационные изображения цели С-141 при различном отношении сигнал/шум
Fig. 7. Two-dimensional radar images of the target C-141 for a different signal-to-noise ratio
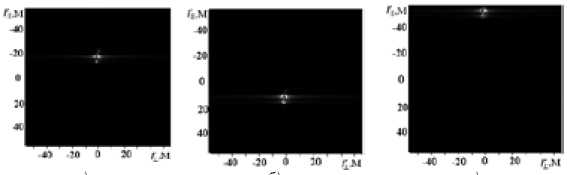
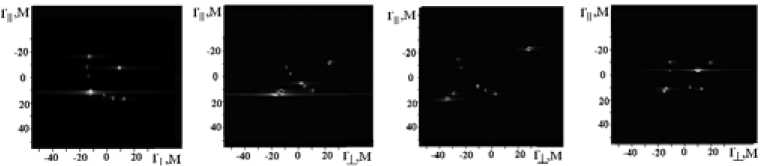
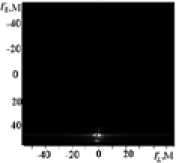
Рис. 8. Двумерные радиолокационные изображения цели А-10А при различных ошибках измерения дальности
г)
Fig. 8. Two-dimensional radar images of the target A-10A for various errors of range measurement слева направо. Видно, что при отношении сигнал/шум – 2дБ распознавание становится проблематичным.
Производилась оценка влияния ошибок измерения дальности до цели на качество ДРЛИ. Моделировалось движение цели типа А-10А. Использовались предыдущие исходные данные за исключением: ракурс цели – 10°; скорость полета цели – 200 м/с; ошибки измерения дальности ± 20 и ± 70 м. На рис. 8 представлены ДРЛИ цели типа А-10А при отношении сигнал/шум – 772 –
13 дБ, ракурс q=10º и ошибках измерения дальности: +20, -20 м, +70 и – 70 м соответственно слева направо, которые свидетельствуют о том, что среднеквадратические ошибки измерения дальности до цели приводят к смещению ДРЛИ по радиальной координате, что может быть скомпенсировано.
Заключение
Предложенная имитационная математическая модель построения двумерных радиолокационных изображений воздушных объектов позволяет проводить всесторонние исследования портретов 19 типов воздушных объектов зарубежного и российского производства при изменении ракурсов локации, характера и параметров траекторных нестабильностей полета, отношения сигнал/шум, параметров зондирующих сигналов РЛС с учетом ошибок измерения радиальной скорости и дальности до цели. Показано, что в условиях отсутствия дестабилизирующих факторов (неравномерности поворота, радиального перемещения, наличия шумов и помех и т.п.) формируемое двумерное радиолокационное изображение воздушных объектов адекватно отражает структуру цели.
Полученные результаты могут быть использованы при разработке и оценке качества систем распознавания классов и типов воздушных объектов по сигнальным признакам в существующих и перспективных РЛС.
Список литературы Имитационная математическая модель построения двумерных радиолокационных изображений воздушных объектов в интересах оценки качества распознавания
- Steinberg B.D. Formation of the radar plane in the microwave frequency range. TIIJeR, 1988, 76(12). 26-46
- Patent 2180445 (RF), dated 06.06.2000, MPK6 G 01 S 13/89. A method of constructing a two-dimensional radiolocation image of air aim based on flight path instability./Mitrofanov D.G., Gusev M.D, Denisov A.V., Bortovik V.V. Zaajvka 2000114138/09. Prioritet 06.06.2000
- Patent 2234110 (RF), MPK7 G 01 S 13/89. Method of constructing a two-dimensional radiolocation image of air aim./Bortovik V.V., Mitrofanov D.G. et. al.
- Shirman J.D., Gorshkov S.A., Leshchenko C.P., Orlenko V.M. Radar recognition Methods and modeling. Foreign Electronics: Achievements of modern electronics. Kiev, 1996, 11, 3-62
- Suhkarevskiy O.I. Scattering of electromagnetic waves by radar air and surface targets. Kharkov, 2009
- Mironov A.M., Mitrophanov, D.G., Pomazuev O.N., Bortovik V.V., Berdishev V.P., Tsyganov A.A. Mathematical model building and Simulation study of radar portraits air objects for recognition. Certificate of registration of an electronic resource no. 20498, date of register. 19.11.2014
- Berdishev V.P., Mironov A.M, Pomazuev O.N., Stuchilin A.I., Kosolapov, A.V. Program that implements the work of mathematical model building radar portraits air targets. State registration Certificate of а computer programs no. 2015615457 date of registering. 18.05.2015
- Radiolokacionnie sistemi, V.P. Berdyshev, V.P. Berdyshev, E.N. Garin, A.N. Fomin e.al./ed. by V.P. Berdyshev. Krasnoajrsk, Sib. Feder. Un-t, 2011, 400 p.
- Basics of creation RLS RTT./V.N. Tajpkin, V.P. Berdyshev, E.N. Garin et. al./ed. by V.N. Tajpkin. Krasnoajrsk, Sib. Feder. Un-t, 2011, 536 p.
