Имитационное моделирование частотно-регулируемых электроприводных газоперекачивающих агрегатов компрессорных станций

Автор: Гуляев И.В., Крюков О.В., Хлынин А.С.
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электротехнические комплексы и системы
Статья в выпуске: 3 т.25, 2025 года.
Бесплатный доступ
Представленная статья имеет целью показать вариант реализации математической модели электропривода турбокомпрессора с частотным управлением для магистрального газоперекачивающего комплекса. Его преобразователь частоты выполнен по алгоритму ШИМ. Модель построена на базе современного программного обеспечения в среде MATLAB. Проанализированы результаты моделирования и доказано, что структура системы автоматического регулирования (САР) позволяет обеспечить высокую точность задания скорости электропривода, сохранение устойчивости при запуске и работу в различных установившихся режимах при воздействии внешних возмущений.
Асинхронный электропривод, турбокомпрессор, частотное регулирование, технологические возмущения, инвариантная система, компьютерное моделирование
Короткий адрес: https://sciup.org/147252017
IDR: 147252017 | УДК: 303.094.7 | DOI: 10.14529/power250305
Simulation modeling of variable-frequency electric drive gas pumping units of compressor stations
The article presents a method for creating a model of a frequency-controlled electric turbocharger drive of a mainline gas pumping complex with an algorithm for implementing pulse width modulation (PWM) for a three-phase autonomous voltage inverter, ensuring a minimum number of switches. It shows the results of the simulation in the MATLAB environment and demonstrates that the structure of the combined automatic control system (CAP) makes it possible to achieve high accuracy in regulating the speed of the electric drive and maintain stability during start-up and steady-state operation with changes in external disturbances.
Текст научной статьи Имитационное моделирование частотно-регулируемых электроприводных газоперекачивающих агрегатов компрессорных станций
Критерии разработки математической модели электроприводного газоперекачивающего агрегата (ЭГПА)
Для строящихся технологических установок систем объектов топливных энергетических комплексов (ТЭК) [1–3] необходимо обеспечить большие мощности подводимой электроэнергии с высоким напряжением питающей сети и созданию отдельных трансформаторных подстанций (ТП) (рис. 1) [4–6].
Реальный технологический процесс исключает возможность проведения экспериментов на работающем оборудовании, поскольку это может привести к неконтролируемым последствиям. Один из возможных выходов – это построение математических моделей по параметрам реальных объектов [7–9].
Один из вариантов разработки таких моделей можно проследить на базе газоперекачивающего агрегата как основного элемента ТЭК. В качестве примера моделирования выбран мощный электропривод ЭГПА [10–12] с частотным регулированием. Главные параметры ЭГПА сведены в табл. 1 [13–15].
Предлагаемая компьютерная модель строилась по описанию алгоритма работы реального электропривода в составе ЭГПА. Выбранный вариант программного обеспечения пакет MATLAB Simulink позволил выполнить разработку структурной схемы модели ЭГПА с частотным регулируемым приводом, который представлен на рис. 2.

Рис. 1. Внешний вид КТП
Fig. 1. General view of a complete transformer substation
Таблица 1
Table 1
Главные технические параметры ЭГПА
Main technical parameters of EGPA
|
Наименование параметра |
Ед. изм. |
Значение |
|
Номинальное напряжение на входе |
В |
10 000 |
|
Производительность объемная, отнесенная к начальным условиям 20°С и 0,1013 МПа |
МЛН м3/суг |
12,5 |
|
Степень сжатия |
о.е. |
1,26 |
|
КПД привода в номинальном режиме |
о.е. |
0,92 |
|
Мощность привода механическая номинальная |
кВт |
4 000 |
|
Частота вращения номинальная |
об/мин |
8 200 |
|
Диапазон рабочих частот вращения, % от номинальной |
% |
от 70 до 105 |
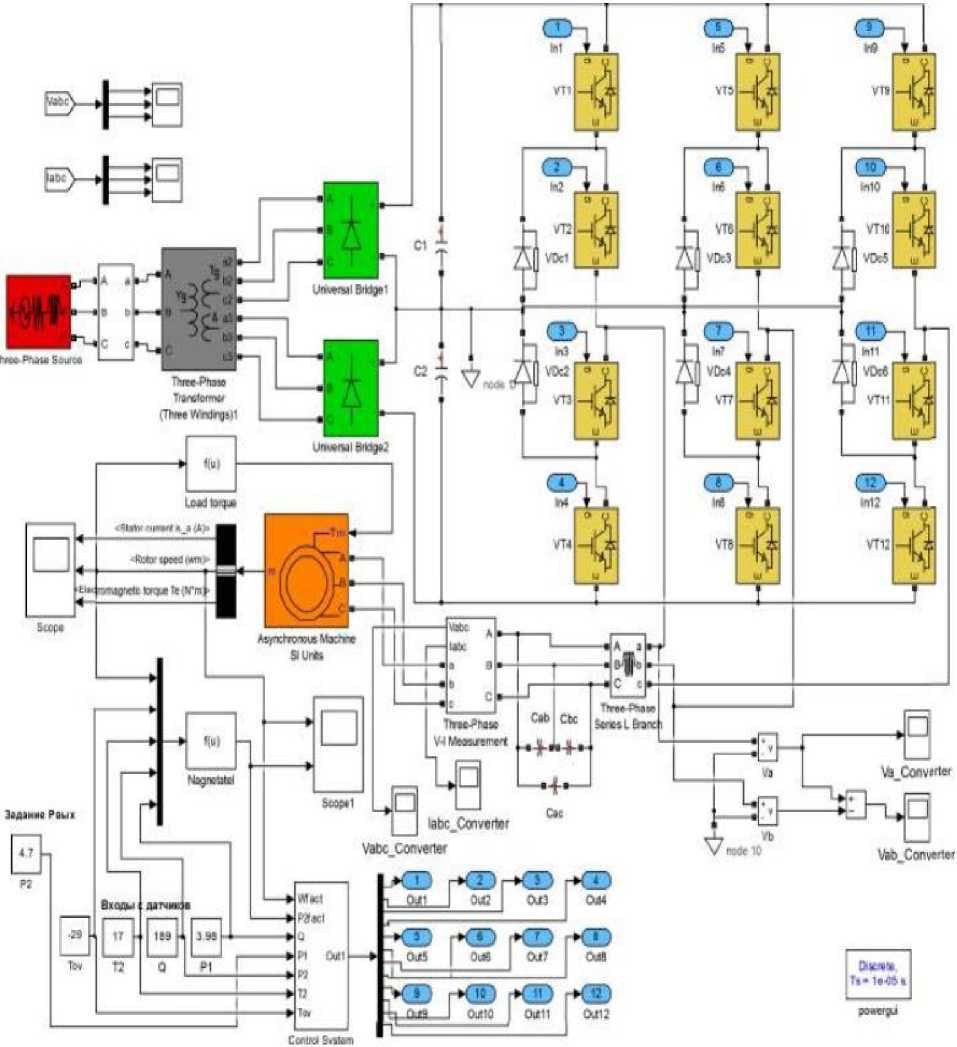
Рис. 2. Структурная схема модели Fig. 2. Structural diagram of the model
В разработанный вариант структурной схемы введены:
-
- трехфазный асинхронный электродвигатель (блок Simulink – Asinchronous Machine);
-
- силовой трансформатор на основе Simulink – Three-Phase Transformer;
-
- центробежный нагнетатель на базе функции MATLAB;
-
- трехфазный источник напряжения для моделирования промышленной сети с параметрами 10 кВ 50 Гц;
-
- преобразователь частоты созданный по клас-
- сической схеме из выпрямителя (блок Simulink – Universal Bridge) и автономного инвертора напряжения (проектируемый блок Simulink);
-
- на выходе ПЧ применён фильтр (блок Simu-link);
-
- САУ, в основу которой заложен проектируемый блок Simulink – Control System;
-
- блоки измерения и контроля электрических и механических параметров Simulink – Three-Phase V-I Measurement, Va, Vb Vс;
-
- для контроля и вывода цифровых параметров системы добавлен блок Simulink – Scope.
Центробежный нагнетатель
На основе метода регрессионного анализа по методике, изложенной в статьях [16–18], выведено уравнение работы центробежного нагнетателя. Этот подход дал возможность максимально точно учесть зависимость основных параметров центробежного нагнетателя от всех влияющих внешних факторов [19–21].
Моделирование электрической сети
Типовой блок библиотеки SimPowerSystem – Three-Phase Source позволил смоделировать силовую электрическую сеть трехфазного напряжения. Для его программирования использованы исходные параметры, представленные в табл. 2.
Модель силового электродвигателя
В промышленном варианте ЭГПА используется асинхронный электродвигатель 1TA 2832-4AU01-Z. Его производство осуществляет фирма Siemens. В математической модели он взят в качестве прототипа. Основные его электрические и механические параметры представлены в табл. 3. Нагрузка привода принята как вентиляторная.
Моделирование ПЧ
Для моделирования ПЧ выбрана реальная схема с явно выраженным звеном постоянного тока. Схема включает в себя нерегулируемый выпрямитель с двумя конденсаторами на выходе и автономный инвертор напряжения.
Таблица 2
Таблица 3
Таблица 4
Параметры модели электрической сети
Table 2
Parameters of the electrical network model
|
Параметр |
Ед. изм. |
Значение |
|
Действующее значение линейного напряжения |
В |
10000 |
|
Частота |
Гц |
50 |
|
Мощность к.з. в точке подключения |
МВА |
300 |
Параметры асинхронного двигателя 1ТА 2832-4AU01-Z
Table 3
Parameters of asynchronous motor 1TA 2832-4AU01-Z
|
Наименование параметра |
Единицы измерения |
Значение |
|
Номинальное напряжение питания |
В |
3300 |
|
Мощность электродвигателя номинальная |
кВт |
4000 |
|
Мощность максимальная длительная |
кВт |
4200 |
|
Номинальная скорость вращения |
Об./мин |
8200 |
|
КПД номинальный |
о.е. |
0,958 |
|
Коэффициент мощности номинальный |
о.с. |
0,75 |
|
Момент номинальный |
Нм |
4658 |
|
Ток номинальный |
А |
970 |
|
Максимальный длительный ток |
А |
1008 |
|
Момент инерции ротора |
КТ NT |
48 |
|
Масса |
КГ |
15500 |
Параметры трансформатора
Transformer Parameters
Table 4
|
Наименование параметра |
Единицы измерения |
Значение |
|
Номинальная мощность |
кВА |
6300 |
|
Номинальное напряжение первичной обмотки |
В |
10000 (с возможностью регулирования ±2x2,5% |
|
Номинальные напряжения вторичных обмоток |
В |
1700 |
|
Напряжение КЗ |
% |
7 |
Выпрямитель смоделирован на основе стандартных блоков штатной библиотеки SimPowerSystem. Электрические параметры реального электрического трехфазного трансформатора взяты из табл. 4.
Инвертор напряжения выполнен по классической мостовой схеме Математическая модель в программном комплексе пакета MATLAB Simulink выполнена по такой же структуре. В разработанную модель вошли:
-
– блоки VT 1– VT 12 (блок Simulink – IGBT/Diode), выполненные на IGBT-транзисторах. Их параметры U н = 1 700 В, I н = 1200 A. Схема выполнена с обратными диодами;
-
– силовые диоды VD с 1 – VD с 6 .
В соответствии с законами ШИМ управляющие сигналы IGBT модулей формируются системой автоматического управления.
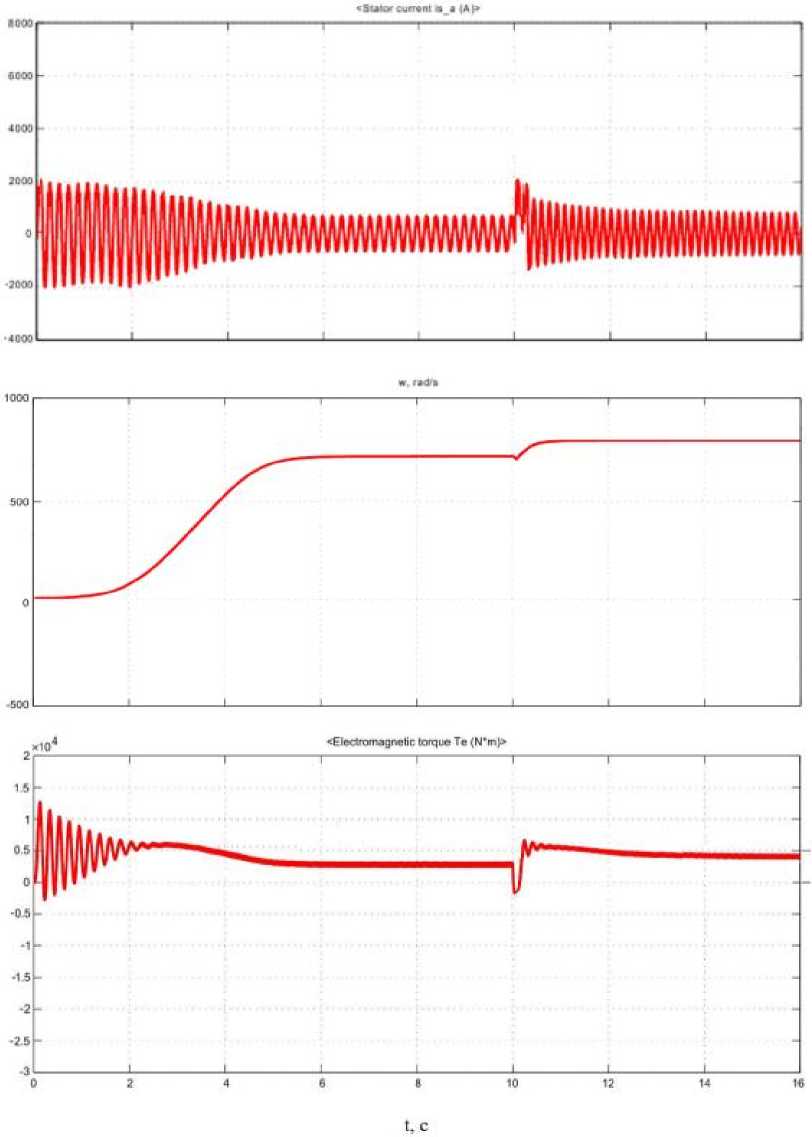
Рис. 3. Результаты моделирования пуска и регулирования скорости Fig. 3. Simulation results of start-up and speed control
Моделирование системы автоматического управления
Согласно исследованиям учёных П.А. Захарова и А.С. Хлынина удобнее всего выбрать схему системы регулирования скорости ЭГПА со стабилизацией давления на выходе с комбинированной структурой [22–25]. Главным параметром, подлежащим контролю, является давление на выходе ЭГПА.
В математической модели для реализации регулирования величины выходного напряжения инвертора выбран вариант стандартного блока ШИМ. В качестве алгоритма работы системы выбран следующий закон управления: при снижении частоты питающего напряжения выходное напряжение инвертора уменьшается пропорционально квадрату изменения частоты.
Блок MATLAB Simulink – Fcn осуществляет задание скорости и выполняет расчет по регрессионному уравнению. Регулирование скорости осуществляется с использованием в схеме ПИД-регулятора. В качестве такого регулятора применен стандартный блок MATLAB Simulink – PID Controller. Выходной сигнал задания скорости поступает на вход блока векторной ШИМ.
Результаты моделирования
По оценке результатов математического моделирования можно сделать ряд выводов по пред- ставленным графикам изменения тока статора, скорости вращения электродвигателя и электромагнитного момента. Результаты расчетных динамических характеристик ПЧ ЭГПА приведены на рис 3.
Из графиков хорошо видны момент пуска двигателя и набор скорости. Все процессы происходят плавно, без существенных колебаний и скачков, перерегулирование отсутствует. Можно наблюдать стабилизацию скорости и давления на выходе. При анализе графиков режимов работы ПЧ с ШИМ выполнены показатели качества электроэнергии питающей сети [21].
Коэффициент гармонических искажений питающей сети составляет 6 %, при допустимом значении – 10 % (рис. 4, 5).
Для улучшения гармонического состава выходного тока и напряжения возможно применение фильтров. Расчет фильтров осуществляется исходя из резонансной частоты 500 Гц. Возможно применить следующие параметры фильтра: С = 0,1 мкФ, L = 4 мГн. Полученный суммарный коэффициент гармонических искажений выходного напряжения ПЧ в статическом режиме с использованием LC-фильтра составляет 0,17 %, что не превышает допустимый порог в 5 %.
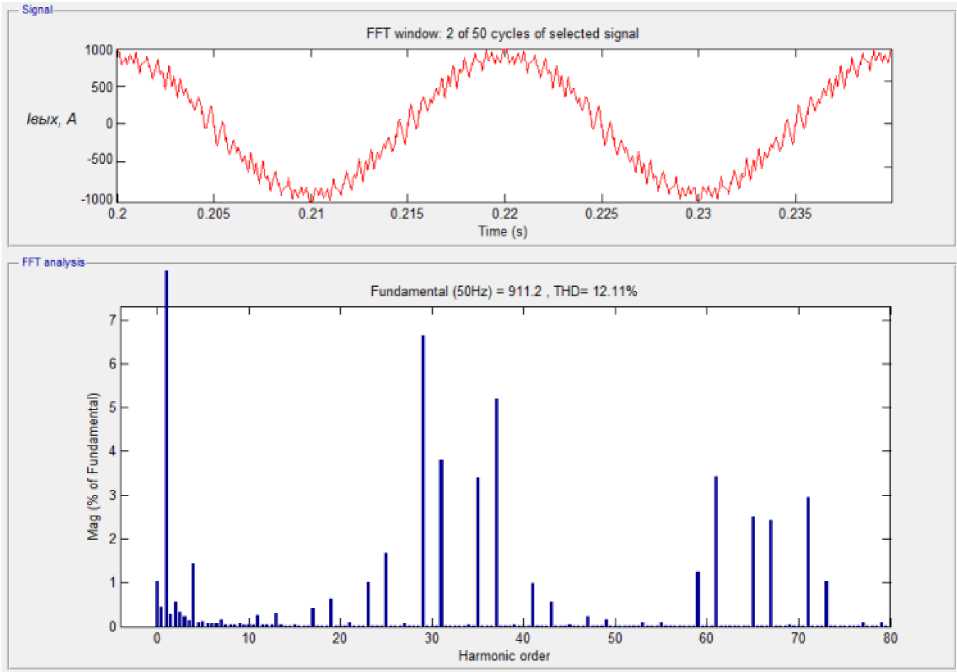
Рис. 4. Гармонический анализ сигналов
Fig. 4. Harmonic signal analysis
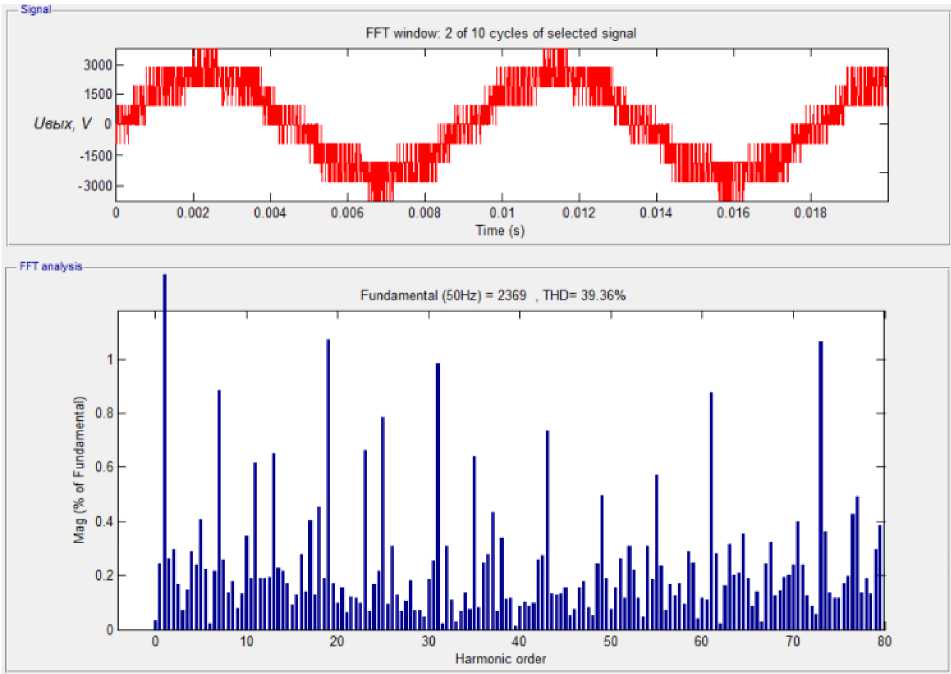
Рис. 5. Гармонический анализ сигналов
Fig. 5. Harmonic signal analysis
Выводы
-
1. Разработанная математическая модель на базе MATLAB Simulink описывает все электромеханические процессы системы частотного регулируемого ЭГПА с представленной САР и стабилизацией давления КС.
-
2. Предложенная САР обеспечивает высокую точность регулирования ЭГПА. Интеграл квадрата ошибки составляет 0,014–0,015 %. Точность регу-
- лирования выходного давления имеет интеграл квадрата ошибки не более 0,098 %. Из результатов можно сделать вывод о том, что полностью сохранена устойчивость в статике и динамике.
-
3. Выбранный вариант инвертора напряжения с векторной ШИМ подтверждает возможность получения значения коэффициента гармонических искажений напряжения не более 0,17 % при допустимом пороге в 5 %.
