Имитационное моделирование работы харвестера: алгоритмы и реализация

Автор: Суханов Юрий Владимирович, Селиверстов Александр Анатольевич, Соколов Антон Павлович, Сюнв Владимир Сергеевич
Журнал: Ученые записки Петрозаводского государственного университета @uchzap-petrsu
Рубрика: Технические науки
Статья в выпуске: 8 (129) т.2, 2012 года.
Бесплатный доступ
В статье приводится краткое описание алгоритмов работы колесных и гусеничных харвестеров и особенностей их программной реализации.
Сортиментная технология, харвестер, имитационное моделирование
Короткий адрес: https://sciup.org/14750297
IDR: 14750297 | УДК: 630.31
Simulation modeling of harvester's work: algorithm and realization
A short descriptions of the algorithm and a simulation modeling of the harvester’s work are presented in the article.
Текст научной статьи Имитационное моделирование работы харвестера: алгоритмы и реализация
Проведение имитационных экспериментов с компьютерными моделями, учитывающими особенности машин и природно-производственных условий, помогает решать проблемы оптимального выбора техники для проведения промышленных лесозаготовок или рубок ухода за лесом. Методикой моделирования операций лесных машин, оснащенных манипулятором, занимались в СПбГЛТУ им. С. М. Кирова [5]. Проблемы расчета производительности операций лесосечных работ изучали в Сибирском федеральном университете [6]. В Петрозаводском государственном университете были проведены значительные работы по созданию моделей лесозаготовительных машин [1], [2], [3]. Модели создавались с помощью методов имитационного моделирования, ГИС-технологий и системы управления базами данных. Проводились работы по созданию моделей процессов заготовки древесины комплексами машин с использованием теории очередей [4].
На лесоинженерном факультете в сотрудничестве с НИИ леса Финляндии METLA и в соответствии с Программой стратегического развития ПетрГУ проводятся исследования операций лесозаготовительных машин в рамках проектов «Технико-экономическая и эколого-социальная оценка перспективности заготовки древесной биомассы для нужд местной энергетики с использованием логистического подхода и ГИС-технологий», «Новые трансграничные решения в области интенсификации ведения лесного хозяйства и повышения степени использования топливной древесины в энергетике».
Модель позволяет имитировать работу специализированных лесосечных машин (колесных харвестеров) и переоборудованной для работы в лесу дорожно-строительной техники (харвестеров на базе гусеничных экскаваторов). Исходными данными для работы модели являются характеристики сгенерированной модельной делянки и характеристики имитируемой лесозаготовительной машины.
Для моделирования работы машины в цикле выполняются три подпрограммы: определения следующей технологической стоянки; движения; валки и обработки деревьев.
При моделировании расположение машины в пространстве характеризуется двумя координатами и углом между продольной осью машины и осью координат. Машина движется по оси технологического коридора, валит и обрабатывает назначенные в рубку деревья. В модели реализованы проверки возможности наведения манипулятора и захвата дерева, а также проверки на возможное опрокидывание машины.
Если дерево прошло все проверки, то оно назначается в валку. При моделировании производится учет повреждений оставляемым на доращивание деревьям, нанесенных им в ходе работы лесной машины:
-
• повреждение кроны и ствола при наведении манипулятора;
-
• повреждения при валке дерева;
-
• повреждения при подтаскивании дерева;
-
• повреждения при обработке дерева.
После того как произведен расчет временных затрат по операциям валки, обрезки сучьев и раскряжевки, отмечаем дерево как поваленное.
При моделировании учитывается:
-
• время на наведение и доставку харвестерной головки к дереву;
-
• время на зажим дерева рычагами;
-
• время на валку дерева;
-
• время на обрезку сучьев и время раскряжевки ствола;
-
• время на перемещение порубочных остатков.
Также на каждой технологической стоянке учитываются временные промежутки на перевод манипулятора из транспортного положения в рабочее и из рабочего в транспортное.
Данные о полученных сортиментах и порубочных остатках включаются в специальные таблицы, которые содержат данные об объемах, координатах расположения в пространстве. Для каждого сортимента учитываются его длина и концевые диаметры.
Алгоритм моделирования работы харвестера представлен на рис. 1.
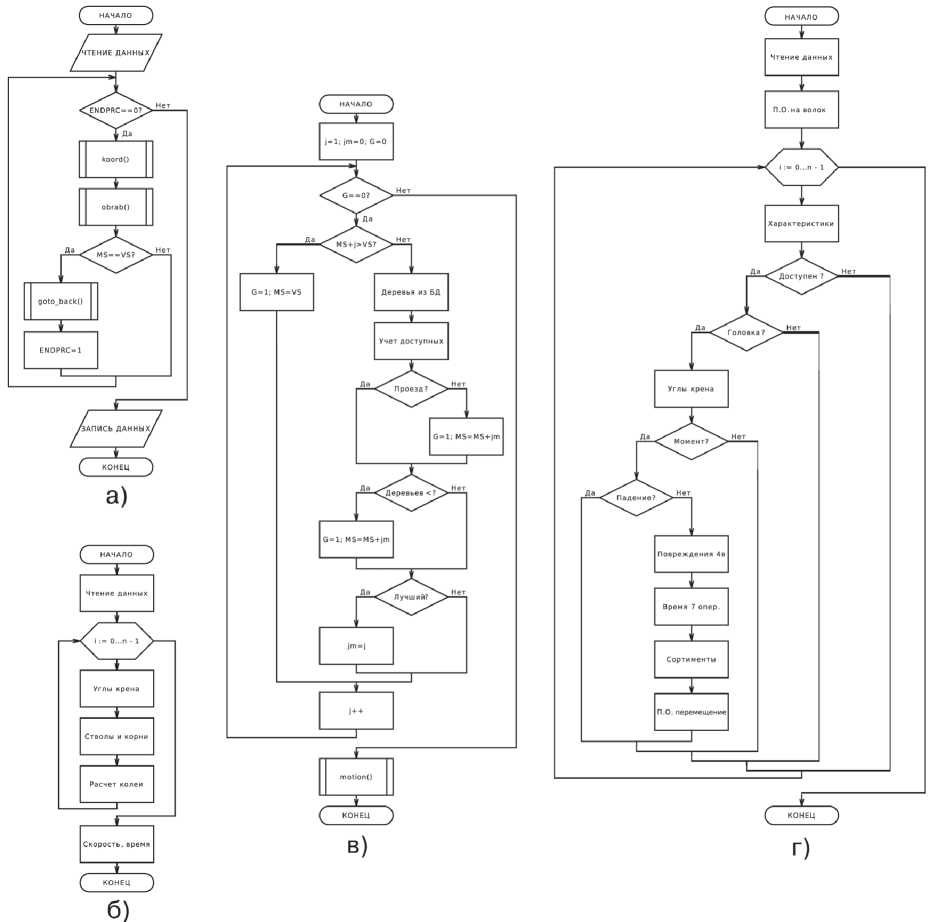
Рис. 1. Схема алгоритма моделирования работы харвестера:
а – основной цикл; б – подпрограмма движения; в – подпрограмма определения координат технологической стоянки; г – подпрограмма валки и обработки
Отличительными особенностями харвестера на базе экскаватора являются гусеничный движитель и поворотная платформа, на которой расположен как сам оператор, так и стрела с навешенной харвестерной головкой. Эти конструктивные особенности значительно влияют на мо-
делирование операций наведения харвестерной головки на дерево, подтаскивания дерева и перемещения порубочных остатков. При моделировании учитываются время поворота платформы
и время перемещения стрелы.
При наведении на дерево угол поворота платформы изменится и найдется как доля от полного оборота, а время на поворот платформы в секундах находится по формуле:
t pov
fabs ^yg i - yg 2 )
I 2 ■ n
■ 60
n
пл
леи с глубиной, равной клиренсу машины. Кроме этого, глубина колеи и уплотнение грунта могут ограничиваться экологическими условиями.
Также в подпрограмме передвижения учитываются повреждения, наносимые оставляемым на доращивание деревьям, которые возникают при перемещении лесной машины по технологическому коридору в условиях сложного рельефа местности. Рассчитываются обдиры коры от корпуса машины, а также процент повреждения корневой системы (за исключением зимнего времени).
Моделирование рассмотренных выше операций работы харвестера реализовано на языке С++ (компилятор MinGW, инструментарий Qt 4.5). Полученная программа позволяет работать в двух режимах: без визуального представления процесса моделирования и в графическом режиме (рис. 2).
где nпл – частота вращения платформы, мин. -1; yg1 – текущий угол поворота платформы, рад.; yg2 – новый угол поворота платформы, рад.
Время, затраченное на движение стрелы в секундах,
.fabs p(XД - Xмаш )2 + (Fd - Yмаш P - V(Xod - Xмаш P + (Yo-d - Yмаш P tper = , str
где Vstr – скорость перемещения стрелы, м/c; Xд,Yд – координаты дерева, м; Xмаш,Yмаш– координаты машины, м; Xold,Yold – координаты харве-стерной головки, м.
Общая скорость на операцию в секундах
op ( pov per ) ∙ sov ,
где k sov – коэффициент совмещения операций поворота и перемещения (по хронометражным наблюдениям за машиной).
В подпрограмме передвижения необходимо
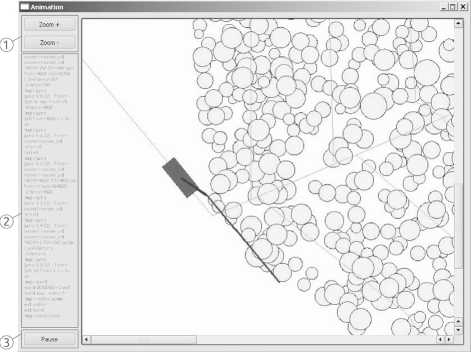
Рис. 2. Графический режим моделирования работы харвестера: 1 – управление масштабом; 2 – отладочная информация; 3 – кнопка «Пауза»
учитывать грунтовые условия, которые влияют на возможность перемещения машины. Граничным условием, по которому определяем, что движение машины невозможно, является наличие ко-
На программы, реализующие данные модели, получено свидетельство о регистрации в Реестре программ для ЭВМ № 2012615490 от 19 июня 2012 года.
* Работа выполнена при поддержке Программы стратегического развития (ПСР) ПетрГУ в рамках реализации комплекса мероприятий по развитию научно-исследовательской деятельности на 2012–2016 гг.
Список литературы Имитационное моделирование работы харвестера: алгоритмы и реализация
- Герасимов Ю. Ю. и др. Геоинформационные системы: теория и применение в лесном комплексе. Йоенсуу: Изд-во ун-та Йоенсуу, 2000. 201 с.
- Герасимов Ю. Ю., Сюнёв В. С. Лесосечные машины для рубок ухода: компьютерная система принятия решений. Петрозаводск: Изд-во ПетрГУ, 1998. 236 с.
- Кильпеляйнен С. А., Перский С. Н. Выбор системы лесозаготовительных машин на базе ГИС-технологий//Структурная перестройка лесного комплекса Республики Карелия: Материалы республиканской науч.-практ. конф. Петрозаводск: КарНИИЛПК, 2003. С. 28-29.
- Морозов Е. В., Шегельман И. Р., Будник П. В. Вероятностно-статистический анализ процесса заготовки сортиментов//Перспективы науки. 2011. № 7 (22). С. 183-186.
- Чайка О. Р. Моделирование работы манипуляторной машины на несплошных рубках в естественных лесах//Лесосечные, лесоскладские работы и транспорт леса. Л.: Ленинградская лесотехническая академия им. С. М. Кирова, 1991. С. 56-60.
- Ширнин Ю. А. Моделирование процессов заготовки сортированных деревьев и хлыстов. Красноярск: Изд-во Красноярского ун-та, 1992. 204 с.
