Имитационное моделирование способов добычи полезных ископаемых на большой глубине

Автор: Конюх Владимир Леонидович, Окольнишников Виктор Васильевич
Журнал: Проблемы информатики @problem-info
Рубрика: Имитационное моделирование технических систем и технологических процессов
Статья в выпуске: 3 (4), 2009 года.
Бесплатный доступ
Разработаны модели роботоориентированных технологий выемки полезных ископаемых на большой глубине и проведения выработок, управления машинами с поверхности, выбора решения об окончании погрузки при дистанционном управлении машиной. В результате имитационных экспериментов оп- ределены характеристики подземных роботов, установлено число машин при интерактивном управлении, найдена степень заполнения ковша, при которой можно заканчивать погрузку. Показано, что для перехода к информационным технологиям добычи необходимо разработать высокоскоростную подземную информа- ционную сеть, устройства обмена информацией между стационарными и подвижными объектами, борто- вые системы управления, устройства получения информации для планирования добычи, системы автовож- дения машин в выработках.
Роботизация, манипулятор, обзорность, сеть петри, погрузочно-транспортная машина, заполнение ковша, крепепередвижчик, система массового обслуживания, оператор, интерактивное управление, информационная сеть
Короткий адрес: https://sciup.org/14319998
IDR: 14319998
Текст научной статьи Имитационное моделирование способов добычи полезных ископаемых на большой глубине
Предстоящий переход к добыче твердых полезных ископаемых на глубине более 1 км с повышенной температурой горных пород сделает невозможной работу людей в подземных условиях. С каждым годом увеличиваются затраты на жизнеобеспечение горнорабочих. Растут расходы на обеспечение безопасности, обучение, страхование, вентиляцию, компенсацию простоев, перемещение шахтеров под землей. До сих пор горное дело остается отраслью с самым низким уровнем автоматизации.
Целью настоящей работы является проверка стратегий подземной добычи полезных ископаемых, основанных на новых возможностях информационных технологий, без постоянного присутствия людей. Решение этой проблемы возможно с использованием следующих способов: 1) подземное выщелачивание полезных ископаемых; 2) разработка средств индивидуальной защиты горнорабочих от воздействий подземной среды; 3) замена горнорабочих манипуляторами с дистанционным управлением; 4) создание роботоориентированных технологий добычи; 5) переход к управлению подземными машинами с поверхности.
Некоторые виды полезных ископаемых могут подвергаться подземной химической обработке. В частности, успешно применяется подземное выщелачивание урановых руд. Выдача раствора полезного ископаемого на поверхность требует значительных затрат на закачиваемый реагент с учетом его потерь в недрах, экологическую защиту и предотвращение замерзания раствора. Реализация второй стратегии в форме создания "шахты будущего", обсуждение которой начато в 70-х гг. XX в. [1], потребует специального обучения горнорабочих и приведет к существенному ограничению их работоспособности.
Третья и четвертая стратегии являются формами роботизации горных работ [2]. Это выбор между вспомогательными роботами, обслуживающими основное горное оборудование, и тех-
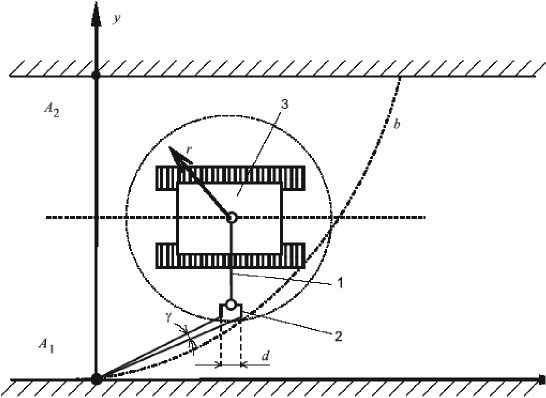
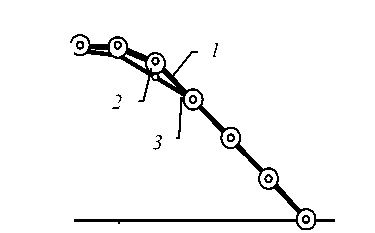
Рис. 1. Обзорность дистанционно управляемого манипулятора в подземной выработке
нологическими роботами, непосредственно выполняющими рабочие операции. Для реализации третьей стратегии в существующие технологии подземных работ можно ввести дистанционно управляемые манипуляторы, заменяющие горнорабочих. Сначала составляются математические модели двигательных действий горнорабочих. Затем разрабатываются варианты выполнения этих действий манипуляторами. Предстоит определить рабочие зоны манипуляторов, их кинематические схемы, усилия и нагрузки в звеньях манипулятора, размеры звеньев, скорости и ускорения перемещений звеньев, погрешности позиционирования и отработки траекторий, способы предотвращения столкновений манипуляторов и оборудования. Главной проблемой является обеспечение эффекта присутствия оператора дистанционного управления в зоне работы манипулятора. При удалении самоходного манипулятора от оператора, перемещающегося по линии А1 А2 в выработке (рис. 1), зона движений рабочего органа будет полностью перекрыта корпусом манипулятора на расстоянии
_ d + d2p - m2 + 2 md / tg у x, =
1 2, где m - ширина выработки; d – ширина захватного устройства; γ - минимальный угол зрения оператора в выработке, зависящий от освещенности и контрастности рабочего органа. Подъем телекамер или их установка на борту робота не приведут к значительному расширению зоны наблюдаемых движений рабочего органа [3]. Психофизиологические ограничения оператора не позволят полностью использовать такие возможности робототехники, как вращательное и телескопическое движение звеньев, измерение расстояний, высокие скорости манипулирования, работа в непрозрачной среде. При вводе дистанционно управляемых манипуляторов в приспособленную для горнорабочих технологическую инфраструктуру сложно совместить робототехнические системы с нероботизирован-ными звеньями добычи.
Для четвертой стратегии в качестве технологических роботов можно использовать самоходные горные машины, оснащенные бортовыми системами управления и средствами обмена информацией. В роботоориентированных технологиях добычи необходимо исключить ручные операции. Появляются задачи выбора и подготовки объектов роботизации, синтеза роботоориентированных технологий выполнения горных работ, распознавания ситуаций и адаптации к условиям работы.
Сопоставим третью и четвертую стратегии с позиции их перспективности (рис. 2).
На первом этапе вводится косвенное управление приводами горных машин и создаются самоходные манипуляторы. Затем для обеих стратегий реализуется дистанционное управление при прямой и вне прямой видимости. Развитие подземных манипуляторов ограничено сокращением ручного труда в традиционных технологиях добы-

Рис. 2. Развитие стратегий шахтной робототехники:
I - дистанционно управляемые манипуляторы (1 - механизация ручных операций; 2 - дистанционное управление при прямой видимости;
3 - дистанционное управление вне прямой видимости; 4 - сокращение ручного труда в традиционной технологии; 5 - работа в опасных местах);
II - роботизированные горные машины (1 - косвенное управление оборудованием; 2 - дистанционное управление при прямой видимости;
3 - дистанционное управление вне прямой видимости; 4 - автоматизация циклических операций; 5 - роботизированные технологии; 6 - адаптивное взаимодействие машин; 7 - гибкие технологии безлюдной добычи)
чи и возможностью работ в опасных местах. Испытания подземного самоходного манипулятора в шахтах Донбасса [4] показали, что многие операции рабочего цикла, такие как монтаж оборудования в забое, придется выполнять горнорабочим. Манипуляторы не смогут быть частью информационных технологий добычи, поскольку сложно автоматизировать множество выполняемых горнорабочими операций. Прогнозы мировых экспертов о замене к началу 90-х гг. XX в. подземных горнорабочих средствами робототех- ники не оправдались [5]. Это обусловлено как сложностью автоматизации в изменяющейся среде, так и консерва- тивностью горных инженеров.
Шахтная робототехника приобретает форму автономных горных машин с адаптивным управлением, обеспечивающим автоматизацию повторяющихся операций в изменяющейся среде [5]. Внедрение дистанционного управления погрузочно-транспортной машиной (ПТМ) на руднике "Vihanti" (Финляндия) позволило окупить дополнительные затраты через 400 рабочих циклов вследствие дополнительного извлечения из очистных камер 20 000 т руды [6].
С целью сравнения роботоориентированных технологий добычи и обоснования требований к шести типам подземных роботов имитировалось взаимодействие роботов в новых технологических структурах, представленных временными сетями Петри.
Сеть Петри представляет собой ориентированный граф с вершинами двух типов: позициями p ∈ P и перехо- дами t ∈ T. Динамика технологического процесса отображается движением маркеров от начальной к конечной позициям. Маркеры задерживаются в промежуточных позициях на время выполнения соответствующих технологических операций. Это время может также соответствовать заданным величинам трудоемкости или стоимости выполнения отдельной операции. В технологии выемки угля выемочный робот РВ движется снизу вверх и снимает полосу угля (рис. 3,а). За ним движется транспортный робот РТ, доставляющий вынутый уголь к месту разгрузки. Информационно-вспомогательный робот РИВ предназначен для осмотра рабочей зоны и выполнения вспомогательных операций. По мере перемещения РВ робот-крепепередвижчик РКП перемещает секции крепи К.
При проведении имитационных экспериментов типа "Что, если…?" ставились задачи согласования работы роботов во времени и пространстве, оценки потерь производительности при отказах, обоснования параметров роботов.
Имитационная модель технологии разработана в виде сети Петри (рис. 3, б ). Перед снятием полосы все роботы
а
РВ
РТ
РИВ

|?1 ^
РКП
А К
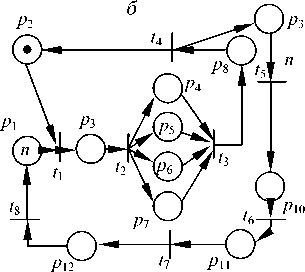
находятся в нижней части забоя, что соответствует наличию n маркеров в позиции р 1 и одного маркера в позиции р 2 разгрузки РТ. Движение РТ к месту выемки имитируется задержкой маркера в позиции р 3 . Переход маркеров в позицию р 4 соответствует выемке РВ, в позицию р 5 – заполнению РТ, р 6 – осмотру забоя РИВ, р 7 – передвижке крепи РКП, а срабатывание перехода t 3 – началу перемещения роботов на расстояние выемки, при котором емкость РТ становится заполненной. По-
Рис. 3. Роботоориентированная технология подземной выемки угля: а - технологическая структура; б - имитационная модель
сле движения РТ к месту разгрузки ( р 8 ) и сраба тывания перехода t 4 один маркер переходит в по
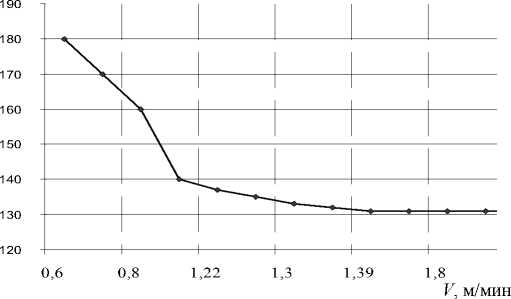
Рис. 4 . Зависимость трудоемкости выемки I от скорости роботизированного крепления V
зицию р 9 счетчика рейсов, а другой – в начальную позицию р 2 разгрузки. Вместе с ( n - 1)- м маркером из позиции р 1 он движется через переход t 1 . После перемещения роботов через n элементарных циклов к концу полосы и срабатывания перехода t 5 роботы РКП ( р 10 ) , РИВ ( р 11 ) и РВ ( р 12 ) возвращаются к началу
а
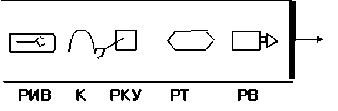
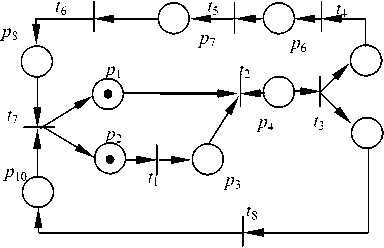
Рис. 5. Роботоориентированная технология проведения выработки: а - технологическая структура; б - сеть Петри
полосы. Затем n маркеров переходят в позицию p 1 , и вынимается следующая полоса угля. Расстояние между РВ и РКП не должно превышать величину, допустимую по горно-геологическим условиям. Таким образом, производительность выемки ограничивается скоростью крепления.
В имитационных экспериментах оценивалось влияние скорости крепления на трудоемкость выемки. Так, при скорости выемки 2,4 м/мин и времени подготовки РВ к работе, равном примерно 45 мин, уменьшение скорости крепления до значений менее 1,2 м/мин приведет к росту удельной трудоемкости выемки (рис. 4).
Модель роботоориентированной технологии проведения подземной выработки представлена на рис. 5.
Выемочный робот РВ на базе проходческого комбайна нарезает массив по сечению выработки и загружает горной массой кузов транспортного робота РТ на базе самоходного вагона (рис. 5, а ). Движущийся за ними робот-крепеустановщик РКУ устанавливает крепь К . Осмотр выработки ведет информационно-вспомогательный робот РИВ. В начале работы маркеры находятся в позиции работы комбайна р 1 и загрузки самоходного вагона р 2 (рис. 5, б ). После заполнения вагона ( р 3 ) маркеры проходят через переход t 2 и задерживаются в позиции р 4 на время движения вагона к месту разгрузки. Затем осуществляются разгрузка вагона ( р 5 ) , его загрузка элементами крепи ( р 6 ) , движение к комбайну ( р 7 ) и перегрузка элементов крепи в крепеустановщик ( р 8 ) . Одновременно проводятся осмотр забоя ( р 9 ) и установка крепи ( р 10 ) . Если установка крепи и загрузка крепеустановщика закончены, разрешается переход маркеров через t 7 в исходные позиции р 1 и р 2 . С помощью имитационных экспериментов решались задачи согласования операций четырех машин во времени и пространстве и выбора параметров горных машин, таких как емкость самоходного вагона.
Более перспективной представляется пятая стратегия, основанная на управлении оборудованием с поверхности (рис. 6). Информация о состоянии погрузочно-транспортных, бурильных, зарядных и набрызг-бетонных машин и другого оборудования передается на поверхность через информационную сеть. При испытании системы управления погрузочно-транспортной машиной с поверхности на машине было размещено примерно 150 датчиков, измеряющих давление в гидроцилиндрах, пневмоцилиндрах и двигателе, скорость, ускорение, направление движения, расстояние до стенок выработки и другие параметры [7]. Наблюдая за поведением машин через бортовые телекамеры, операторы передают команды управления из имитаторов кабин на поверхности.
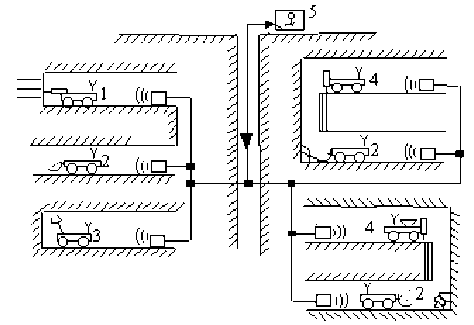
Рис. 6. Схема управления подземными машинами с поверхности:
1 - бурильная машина; 2 - погрузочно-транспортная машина; 3 - набрызг-бетонная машина; 4 - зарядная машина; 5 - кабина оператора
t
t
t7
t6
P 5
t9
t 10
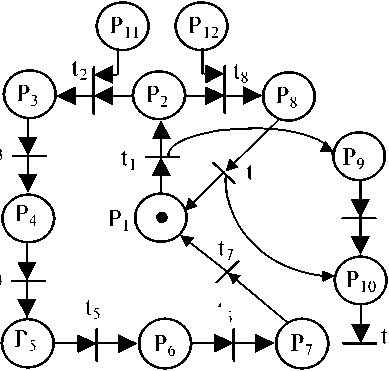
Рис. 7. Сеть Петри, имитирующая процесс погрузки ковшом подземной погрузочно-транспортной машиной
t 11
Система управления погрузочно-транспортными машинами с поверхности впервые испытана на руднике "Cooper Cliff North Mine" (Канада) [8]. Оператор управлял сложным для автоматизации процессом зачерпывания руды, наблюдая за машиной через телекамеры. Движение по выработке осуществлялось в автоматическом режиме. Переключая режимы управления, один оператор мог управлять несколькими машинами. Наряду с улучшением условий труда сократились затраты на доставку оператора к месту работы, уменьшились потери от простоев горных машин. Дальнейшее развитие этот подход получил в системах "Robominer" (фирма "Automated Mining Systems", Канада) на рудниках Канады и Германии, "AutoMine" (фирма "Sandvik Tamrock", Финляндия) на рудниках Швеции, Чили и ЮАР, "MINEGEM" (фирма "Сaterpillar", США), научного центра "CSIRO" (Австралия) на рудниках Австралии.
При дистанционном управлении подземной погрузочно-транспортной машиной возникает задача выбора опе- ратором решения о повторении зачерпывания до полного заполнения ковша или выезде с места погрузки с компенсацией неполного зачерпывания дополнительными рейсами. Степень заполнения ковша после каждого зачерпывания зависит от множества случайных факторов, таких как распределение отбитой горной массы. В работе [9] предложены способы измерения степени заполнения ковша по времени свободного опускания ковша или давлению в поршневой полости гидроцилиндра стрелы. Решение о продолжении погрузки или выезде из камеры зависит от результата измерения, времени повторного зачерпывания и расстояния до места разгрузки. Применение аналитических методов потребует предварительной оценки вероятности полного заполнения ковша за одно зачерпывание и среднего числа повторных зачерпываний до полного заполнения.
Для сравнения двух стратегий разработана имитационная модель процесса погрузки в виде сети Петри (рис. 7). Отдельное зачерпывание имитируется задержкой маркера в позиции P 1 . После этого происходит измерение степени заполнения ковша массы ( P 2 ) . Если заполнение ковша больше заданного, то процесс погрузки заканчивается, ковш поворачивается в транспортное положение, машина выезжает из камеры ( P 3 ) и движется к месту разгрузки ( P 4 ) , где ковш разгружается ( P 5 ) . После разворота ( P 6 ) машина движется к месту погрузки и въезжает в камеру ( P 7 ) . Если заполнение ковша после зачерпывания меньше заданного, машина отъезжает назад ( P 8 ) и повторяет зачерпывание ( P 1 ) . Время задержки маркеров в позиции Р 9 имитирует степень случайного заполнения ковша, представляющую собой случайное число в интервале (0 ÷ 1,0) с равномерным законом распределения. Заданная степень заполнения ковша изменялась с шагом 0,025. В позиции P 10 происходит сравнение фактической и заданной степеней заполнения ковша. Если фактическое заполнение меньше заданного, то маркер появляется в позиции Р 12 и открывается переход t 8 . Если фактическое заполнение больше заданного, то маркер появляется в позиции Р 11 и открывается переход t 2 .
В имитационных экспериментах для каждой стратегии задавалась одна и та же степень заполнения ковша, после чего оценивалась сменная производительность для расстояний доставки 45, 90 и 120 м. Результаты имитационных экспериментов показали, что для выезда из камеры достаточно заполнять ковш на 65-70 % его объема (рис. 8).
Время, остающееся на дополнительные рейсы, компенсирует потери времени на повторные зачерпывания, а сменная производительность становится на 17 % выше, чем при полном заполнении ковша (при расстоянии доставки 45 м и времени зачерпывания 10 с). В работе [10] предложено автоматически изменять заданную степень заполнения ковша в зависимости от расстояния доставки.
Имитационная модель системы " N операторов на поверхности – M машин под землей" разработана на специализированном языке GPSS/H ® в виде замкнутой системы массового обслуживания с тремя состояниями машин: управление погрузкой с поверхности, автоматическое движение к месту разгрузки и обратно, ожидание высвобождения оператора [11]. Одной из задач исследования является выбор дисциплины обслуживания машин несколькими операторами. В результате имитационных экспериментов установлено, что в системе с N = 3, M = 7 при времени цикла 5 мин и автоматизированных операций K менее 60 % коэффициент загрузки операторов η практически не зависит от закона распределения времени погрузки, движения и разгрузки (рис. 9).
Простои машин в ожидании освобождения операторов составят 15-60 % времени смены. При доле автоматизированных операций 45÷75 % закрепление операторов за машинами уменьшит производительность на 3,0 – 4,5 % по сравнению с вариантом, когда освободившийся оператор управляет любой машиной.
Для реализации стратегии управления машинами с поверхности необходимо разработать:
-
- распределенную информационную сеть, связывающую сеть выработок с поверхностью;
-
- устройства связи стационарных узлов информационной сети с самоходными машинами;
-
- бортовые системы автоматического управления машинами;
-
- систему автовождения машин в выработке;
-
- бортовые видеодатчики рабочей зоны, датчики положения механических элементов и контроля нагрузок на рабочих органах;
-
- систему оперативного планирования добычи с учетом текущего состояния горных работ и оборудования;
-
- систему контроля и диагностики горных машин.
Рассредоточенные в выработках машины соединяются между собой и с поверхностью высокоскоростной информационной сетью для контроля и планирования процессов добычи. Создание автоматизированных систем управления технологическими процессами (АСУ ТП), применение систем машинного зрения, интеллектуальных датчиков, систем радиочастотной идентификации в промышленной автоматизации открывают новые приложения информационных технологий в горном деле [12] .
η
1,0б
0,5
0,5
1,0 K
0 0,2 0,4 0,6 0,8 1,0 k
Рис. 8. Зависимость сменной производительности Q погрузочно-транспортной машины от заданной степени заполнения ковша k при различных расстояниях доставки L :
1 - L = 45 м, 2 - L = 90 м, 3 - L = 120 м
Рис. 9. Загрузка операторов при различных законах распределения времени технологических операций: 1 - нормальный со стандартным отклонением 5 % от среднего; 2 - нормальный со стандартным отклонением 20 % от среднего; 3 - экспоненциальный закон
В отличие от горнорабочих, технические устройства не требуют затрат на жизнеобеспечение, способны накапливать информацию, точно измерять физические величины и стабилизировать качество технологических операций. Однако автоматизированное оборудование не способно выполнять интеллектуальные функции человека, такие как распознавание объектов или выбор решения в непредвиденных ситуациях. Так, выбор направления движения в местах пересечения выработок потребует значительного усложнения алгоритма управления. Кратковременная потеря команды с поверхности приведет к неуправляемому движению машины в выработке. Поэтому новые технологии добычи должны быть ориентированы на автоматизированное и роботизированное оборудование с дистанционным управлением. Реализация малооперационных технологических процессов в стабилизированной технологической среде позволит повторять операции с фиксацией начальной и конечной точек перемещения рабочих органов, т. е. создаст благоприятные предпосылки для автоматизации и роботизации горных работ.
В России опыт разработки подземных информационных сетей и устройств адаптивного управления горными машинами отсутствует. На самоходных машинах не предусмотрено электрогидравлическое управление приводами, не разрабатываются датчики состояния рабочих органов и бортовые контроллеры.
Дальнейшим развитием имитационного моделирования добычи полезных ископаемых на большой глубине является переход от набора автономных моделей отдельных участков технологического цикла добычи и транспортировки полезных ископаемых к комплексу взаимосвязанных моделей всего технологического цикла. Данная взаимосвязь может осуществляться при использовании единой базы данных, единой формы представления хода и результатов моделирования, единой формы визуально-интерактивного взаимодействия с моделью. Такое единство может обеспечить специализированная визуально-интерактивная система имитационного моделирования [13].
Для достижения поставленных целей специализированная визуально-интерактивная система имитационного моделирования должна иметь следующие возможности:
-
- выполнение имитационных моделей;
-
- визуализация хода и результатов имитационных экспериментов;
-
- связь с базой данных;
-
- интерактивное взаимодействие экспериментатора с моделью в процессе построения и исполнения моделей;
-
- моделирование технологического оборудования;
-
- моделирование внешней среды;
-
- моделирование алгоритмов управления или использование реальных программ автоматического управления;
-
- моделирование нештатных ситуаций.
С использованием специализированной визуально-интерактивной системы моделирования предполагается решить следующие задачи:
-
- определение оптимальной функциональной структуры и параметров робототехнической системы;
-
- количественная оценка эффективности робототехнической системы и границ целесообразности ее создания;
-
- определение источников эффективности и вариантов построения робототехнической системы;
-
- оценка соотношения дистанционного и автоматического управления самоходными машинами;
-
- оценка загруженности оператора по управлению группой самоходных машин;
-
- имитация отказов оборудования и возникновения аварийных ситуаций;
-
- разработка интерфейса оператора с подземным оборудованием и др.
Разработка визуально-интерактивной системы имитационного моделирования с указанными свойствами ведется в Конструкторско-технологическом институте вычислительной техники СО РАН в рамках проекта "Разработка методов и средств создания комплексно-испытательного моделирующего стенда для автоматизированных систем управления технологическими процессами предприятий горнодобывающей промышленности" Программы фундаментальных исследований Президиума РАН "Интеллектуальные информационные технологии, математическое моделирование, системный анализ и автоматизация".
Список литературы Имитационное моделирование способов добычи полезных ископаемых на большой глубине
- КУРЛЕНЯ М. В. Развитие технологии подземных горных работ/М. В. Курленя, В. И. Штеле, В. А. Шалауров. Новосибирск: Наука. Сиб. отд-ние, 1985.
- KONYUKH V. Shapes of robotization in mining//Proc. of the 26th Intern. symp. on computer applications in the mineral industries (APCOM-XVI), 16-20 Sept., 1996. S. l.: UniversityPark, Pennsylvania State University (USA), 1996. P. 197-200.
- КОНЮХ В. Л. Предпроектный анализ шахтных робототехнических систем/В. Л Конюх, О. В. Тайлаков. Новосибирск: Наука. Cиб. отд-ние, 1991.
- КИКЛЕВИЧ Ю. Н. Шахтная робототехника/Киев: Техника, 1987.
- КОНЮХ В. Л. Шахтная робототехника/Кемерово: Кузбассвузиздат, 2000.
- LAATIO E., HURSTI H. Remote control loading at Vihanti base metal mine/World Mining 3. 1980. № 12. P. 32-34.
- DEGASPARI J. Armchair mining//Mech. Engng. 2003. № 2. P. 24-26.
- BAIDEN G. Combining teleoperation with vehicle guidance for improving LHD productivity an Inco-limited//CIM Bullettin. 1994. V. 981, № 87. P. 36-39.
- КОНЮХ В. Л., ЧАЙКОВСКИЙ Э. Г., РУБЦОВА Е. В. Способы контроля заполнения ковша погрузочно-транспортной машины при выемке руды в опасных местах//Физ.-техн. проблемы разработки полезных ископаемых. 1988. № 2. C. 67-73.
- KONYUKH V. Use of intelligent automation for mine robot cars//Proc. of the 3rd Intern. symp. on mine mechanization and automation. S. l.: Golden, Colorado School of Mines (USA), 1995. V. 1. P. 1.45-1.56.
- КОНЮХ В. Л., РАМАЗАНОВ Р. А. Управление подземными погрузочно-транспортными машинами с поверхности//Физ.-техн. проблемы разработки полезных ископаемых. 2004. № 4. С. 61-66.
- КОНЮХ В. Л. Промышленная автоматизация в концепции рудника будущего//Горн. информационно-аналитический бюл. 2007. № 6. С. 39-44.
- НЕЧЕПУРЕНКО М. И., ОКОЛЬНИШНИКОВ В. В., ПИЩИК Б. Н. Моделирование сложных технологических объектов управления//Сиб. журн. вычисл. математики. 2007. Т. 10, № 3. С. 299-305.
