Improved Classification Methods for Brain Computer Interface System

Author: YI Fang, LI Hao, JIN Xiaojie
Journal: International Journal of Computer Network and Information Security(IJCNIS) @ijcnis
Article in issue: 2 vol.4, 2012.
Free access
Brain computer interface (BCI) aims at providing a new communication way without brain’s normal output through nerve and muscle. The electroencephalography (EEG) has been widely used for BCI system because it is a non-invasive approach. For the EEG signals of left and right hand motor imagery, the event-related desynchronization (ERD) and event-related synchronization(ERS) are used as classification features in this paper. The raw data are transformed by nonlinear methods and classified by Fisher classifier. Compared with the linear methods, the classification accuracy can get an obvious increase to 86.25%. Two different nonlinear transform were arised and one of them is under the consideration of the relativity of two channels of EEG signals. With these nonlinear transform, the performance are also stable with the balance of two misclassifications.
Brain computer interface, signal processing, motor imagery, classifier, nonlinear transform
Short address: https://sciup.org/15011055
IDR: 15011055
Text of the scientific article Improved Classification Methods for Brain Computer Interface System
Published Online March 2012 in MECS DOI: 10.5815/ijcnis.2012.02.03
Brain computer interface (BCI) aims at providing a new communication way without depending on brain’s normal output through nerve and muscle [1]. Real-time interfaces between the brain and electro-mechanical devices could be used to restore people's motor functions whose lost from injury or disease. So the BCI is one of hot issues in the field of brain research, especially motor imagery.
BCI system bases on the electroencephalographic (EEG) signal processing. It consists of signal capturing module, signal processing module, feature extraction module and pattern recognition module.
Because of the complex of EEG signal both in time domain and frequency domain, a real-time system of BCI need a balance of calculating speed and the classifying accuracy. An ideal BCI system can response people’s motor imagery in a short time and need simple training.
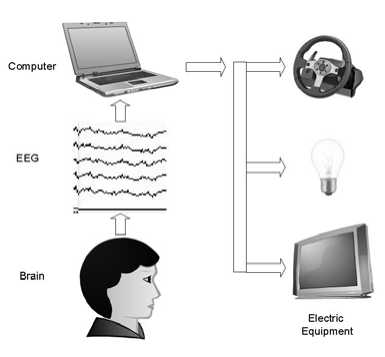
Figure 1 Sketch diagram of BCI system
EEG signals can be divided into δ(2-4Hz), θ(4-8Hz), α(8-13Hz) and β(13-30Hz) in frequency domain, so there are different methods for classification[2][3]. In this work, classification is based on the characteristics extracted from ERD and ERS[4][5]. Because of the nonstationarity and nonlinearity of EEG signals, the nonlinear transform was used in this paper, compared with the traditional method of linearity; it can increase the classification accuracy obviously.
-
II. Material
According to the International EEG Association, a standard EEG recorder should use the 10-20 system which has 75 electrodes to capture the signal on a subject’s scalp. The electrode positions are showed in Figure2.
As the EEG signal is extremely weak, BCI system need a high-gain amplifier to record the signal.
In these 75 electrodes, the C3 and C4 are most relative to the subject’s motor imagery of left and right hand [4][5]. The event-related desynchronization(ERD) and event-related synchronization(ERS) are used as classification features.
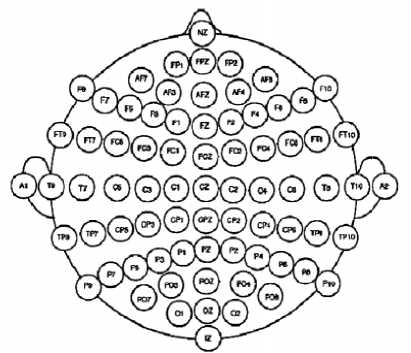
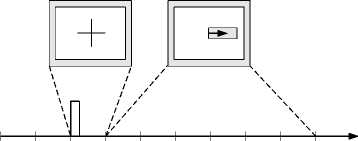
Figure 2 The electrode positions of 10-20 system indicates the beginning of the trial, and a cross“+” was displayed for 1s; Then at t=3s, an arrow (left or right) was displayed as cue. At the same time the subject was asked to do the motor imagery according to the cue.
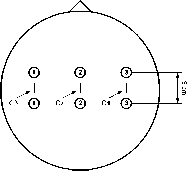
The recording was made using a G.tec amplifier and a Ag/AgCl electrodes. Three bipolar EEG channels(anterior ‘ + ’ , posterior ‘ - ’ ) were measured over C3, Cz and C4. The EEG was sampled with 128Hz, it was filtered between 0.5 and 30Hz. For each trial, there are 1152 sampling points.
0123456789sec
Feedback period with Cue
Trigger Beep
Figure 3 Electrode positions (up) and timing scheme (down)[7]
Dataset was provided by Department of Medical Informatics, Institute for Biomedical Engineering, University of Technology Graz[6].
This dataset was recorded from a normal subject (female, 25y) during a feedback session. The subject sat in a relaxing chair with armrests. The task was to control a feedback bar by means of imagery left or right hand movements. The order of left and right cues was random.
The experiment consists of 280 trials of 9s length. The first 2s was quite, at t=2s an acoustic stimulus
Ш Processing
-
A. Preprocessing of EEG signals
Because there is a lot of random noise in EEG signal, so a suitable filter is necessary.
As the motor imagery occurs at t=3s, which lasts for 6 seconds, so the data of 3s-9s a total of 768 sampling points are used. Because of the ERD and ERS of motor imagery are mainly in the range between 10Hz and 12Hz in frequency domain[4][7], so the signals are filtered by a Butterworth filter, which is designed by Matlab with FDAtool toolbox.
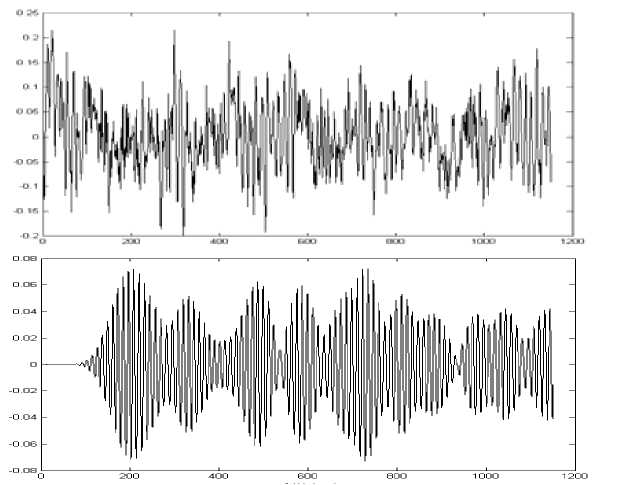
Figure 4 The original signal and the signal after the band-pass filter
-
B. Traditional second-order model
The EEG signals are nonstationary random signals. For each trial, it is a finite sequence which meets the condition of energy limited. So the method based on EEG’s discrete power is widely used. The power P is defined as
n
P = Z ^ (i )2 (1)
i = 1
According to the upper formula, the second-order characteristics of C3 and C4 were used as the criterion of classification. The elements of a two dimension vector are defined as
n
E c 3 = ^ C 3( i ) 2 (2)
i = 1
E c 4 = ^C 4( i )2 (3)
i = 1
-
C. Nonlinear transform of the original data
In practice, the second-order characteristics of EEG signals perform some nonlinear properties which limit the effects of the linear classifier. So the improved methods based on the nonlinear transform of the data can get better results. Figure5 shows a nonlinear transform can make linearly nonseparable data to linearly separable.
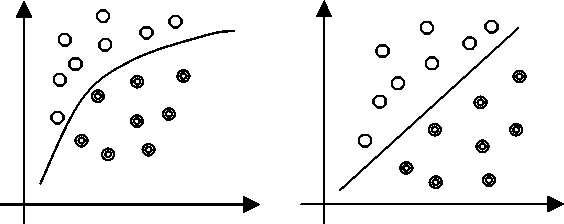
Figure 5 Nonlinear transform of original data
In this work, two different transform were taken.
Transform (A) C3 s -th power and C4 t -th power were combined into a two-dimensional statistic for classification. The two-dimensional features are defined as
n
E c 3 = £ | C 3( i )Г1 + > ) i = 1
n
Ec4 = X I C4(i)|(1+tt i=1
0
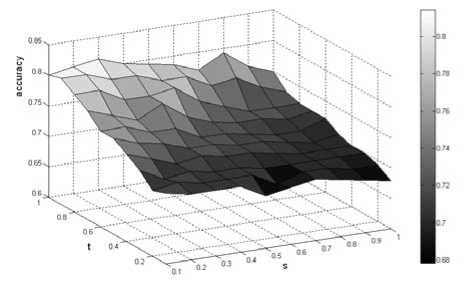
0 Transform (B) This transform is an improvement of the former method. Based on the research, the signals of C3 and C4 have relativity [8], for example, C3 signals have some component of C4. So for the C3 characteristics, multiplied by C4 (1-s)-th power to counteract the component of C4. The two-dimensional features are defined as n Ec3 = £ | C3(i) |(1+5) | C4(i) |(1-5) 0 i=1 n Ec4 = ^ | C4(i) |(1+t) | C3(i) |(1-t) 0 i=i The target of the transform above is to make the linearly nonseparable data to linearly separable. After the nonlinear transform, the data can be classified with a linear classifier (e.g. Fisher classifier). For the reasons of individual subjects' differences and the electrode contact state, s and t have different optimal values in each trial, but in a period of time, the s and t have a relatively stable optimal value. It can be obtained through training. D. Fisher classifier The general type of linear discriminant function is Sw = S12+ S 22 (11) Fisher criterion function is defined as (m2 m. - m3) J (w) 1 2 (12) F S12+ S 22 The w will make the JF(w) as large as possible[9]. For this experiment of the 140 trials, EC3 and EC4 which come from nonlinear transform are used to train the classifier. IV. Results In order to show how s and t influence the classification accuracy, a primary experiment was done which use 140 trials to train and to classify themselves. The relationship between s,t and the accuracy were shown in the following Figure6 (nonlinear transform A) and Figure7(nonlinear transform B). g (x) = WT X + W о (8) g (x) is a signed scalar, when g (x) is greater than zero, that for the left hand motor imagery, when g (x) is less than zero, that for the right hand motor imagery. The w and w0 are obtained through training. Fisher classifier is based on a projection which can lead the multi-dimensional to one-dimension. After the projection, the data are in one-dimension space Y, sample average is defined as m-=TrLx i=1,2 (9) Ni У e Yi The within-class scatter is defined as ~ si = ^ (У - m~i) i =1,2 (10) У eYi Figure 6 The relationship between s, t, and the accuracy (nonlinear transform A) The sum of the two within-class scatter is defined as Figure 7 The relationship between s, t, and the accuracy (nonlinear transform B) (SVM) For the left and right motor imagery classification, there are also many methods such as SVM, but the SVM with high computational complexity. This paper presents nonlinear transform methods with low computational complexity, which is more suitable for real-time systems. And the classification accuracy have already reached or even locally exceeded the SVM. The Table II shows the results of classification with SVM which is quoted from reference [10], and the dataset is the same one used in this paper. With different s and t, the accuracy are also different. The traditional method is only a particular case with s=1.0 and t=1.0 in the both two methods above. So the conclusion can be drawn that the nonlinear transform achieved better results. As the nonstationarity of the EEG signals, the s and t are time-varying, a further experiment was taken. In this time, 40 trials are used to train the classifier, and the next 40 trails are used to check the results. This is a model which can be realized in a real BCI system. With this model, this system needs a short training for each user. The results are showed in Table I, which compared with the traditional method. With the comparison, it is obviously to find that nonlinear transform get a better result, especially nonlinear transform (B). TABLE I. Compare different methods No. Num of test trials Classification accuracy(%) Traditional method Nonlinear Transform(A) Nonlinear Transform(B) 1 40 87.50 87.50 95.00 2 40 77.50 77.50 80.00 3 40 95.00 95.00 95.00 4 40 67.50 70.00 75.00 avg --- 81.88 82.50 86.25 TABLE II. Classification accuracy with SVM (quoted from Reference[10] ) No. Num of train trials Num of test trials Classification accuracy (%) 1 80 140 84.29 2 120 140 86.43 3 140 140 84.29 B. Analysis of misclassification In a real-time classification process, there are two kinds of classification errors, mistaking right to left and left to right. A good BCI real-time system not only requires a low misclassification rate, but also requires balance of the two kinds of misclassifications. A balance of the two kinds of misclassifications means the system's performance is more stable. The test results of misclassifications are shown in Table III. V. Discussion C. Comparison with Support Vector Machine TABLE III. The misclassifications of traditional METHOD AND NONLINEAR TRANSFORM No. Num of test trials Traditional method Nonlinear transform(B) L→R R→L L→R R→L 1 50 7 2 3 4 2 50 8 3 4 3 3 50 4 8 3 3 4 50 4 9 6 7 It is obviously to find that nonlinear transform (B) has a better balance of the two misclassifications. C. Further improvement In a real-time classification process,the optimal s and t will be obtained with training, but the nonstationarity of EEG leads to a decline of accuracy over time. So a further improvement was raised. With a feedback adjustment, the s and t will be adjusted dynamic. As the EEG signals are extremely weak with noise, and even any prior information of the noise cannot be informed, in this case, an adaptive filter can provide an excellent performance in noise elimination [11]. VI. Summary The methods in this paper give nonlinear models for BCI system with low a computational complexity which meet the need of real-time system. As the methods in this paper take into account of the linear inseparability and the relevance of C3 C4, so the methods get higher accuracy. The EEG signals are nostationary random signals, so the classification for them relate to many factors like filter design, nonlinear transform methods selection and parameters determination. And any factor can influences the other factors, therefore, in a real-time BCI system, the consideration must be integrated. Acknowledgment We are most grateful to Professor Huang Liyu, whose useful suggestions; incisive comments and constructive criticism have contributed greatly to the completion of this paper. He devotes a considerable portion of his time to reading this manuscripts and making suggestions for further revisions. We are also greatly indebted to all our teachers Ren Aifeng, Liu Yanming, Xie Kai, Fu Shaofeng and Kuo Yonghong. They have helped us directly and indirectly in this study. Any progress that we have made is the result of their profound concern and selfless devotion.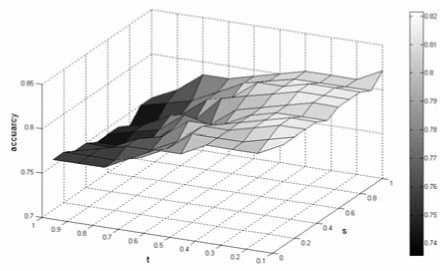
References Improved Classification Methods for Brain Computer Interface System
- Paul Sajda, Klaus-Robert Müller and Krishna V. Shenoy, “Brain-Computer Interfaces, ” IEEE Signal Processing Magazine, 2008. January. pp.16-28.
- Muhammad Bilal Khalid, Naveed Iqbal Rao, Intisar Rizwan-i-Haque, Sarmad Munir, Farhan Tahir, “ A Brain Computer Interface (BCI) using Fractional Fourier Transform with Time Domain Normalization and Heuristic Weight Adjustment”, Proceedings of ICSP(2008) China.
- Wu Bian,Zheng Xiaoxiang,Su Yu,Zhang Jianhui,Li Xin,Zhang Jicai, Cheng Weidong , “A Virtual Chinese Keyboard BCI System Based on P300 Potentials ”, Acta Electronica Sinica, vol.37, no.8, 2009.
- Steven Lemm, Christin Schäfer, and Gabriel Curio.“ BCI Competition 2003—Data Set III: Probabilistic Modeling of SensorimotorμRhythms for Classification of Imaginary Hand Movements”. IEEE Transactions on Biomedical Engineering , vol.51, no.6, June 2004.
- Zhao Qibin, Zhang Liqing,CIichocki Andrzej,“EEG-based asynchronous BCI control of a car in 3D virtual reality environments”, Chinese Science Bulletin, vol.54, no.1, pp.78-87, January 2009.
- Alois S, “Data set:BCI-experiment”, http://www.bbci.de/ competition/ii/Graz_description.doc, 2003.
- Arnaud Delorme,Scott Makeig. “EEG changes accompanying learned regulation of 12-Hz EEG activity”. a Center of the Institute for Neural Computation,the University of California San Diego.
- Pei Xiaomei, Zheng Chongxun, Bin Guangyu, “Classification of the Mental Tasks Based on Multichannel Electroencephalogram Features”, Journal of Xi'an Jiaotong University (in Chinese), vol.39, no.8, 2005.
- Pei Xiaomei, Zheng Chongxun, “Feature Selection and Optimization of Movement-Related EEG Based on Fisher Criterion Time Frequency Analysis, ” Journal of Xi'an Jiaotong University (in Chinese), vol.42, no.8, 2008.
- Ying Jiguang, Wan Xingyu, “Analysis of Right and Left Motor Imagery Based Empirical Mode Decomposition”, Progress in Biomedical Engineering (in Chinese), vol.30, no.3 pp.125-130, 2009
- Sykacek Peter, Roberts Stephen J, Stokes Maria, “Adaptive BCI based on variational bayesian Kalman filtering: An empirical evaluation, ” IEEE Transactions on Biomedical Engineering, vol.51, no.5, pp. 719-727. 2004
