Импульсное управление асинхронным двигателем с фазным ротором

Автор: Усынин Юрий Семнович, Валов Артем Владимирович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 20 (92), 2007 года.
Бесплатный доступ
Приводятся принцип работы, расчетные характеристики, уравнения математической модели асинхронного электропривода с импульсным управлением. Обращается внимание на его высокие энергетические и благоприятные эксплуатационные характеристики.
Короткий адрес: https://sciup.org/147158029
IDR: 147158029 | УДК: 62-83.01
Текст научной статьи Импульсное управление асинхронным двигателем с фазным ротором
Принципиальная схема электропривода. В электроприводе, в котором используется асинхронный двигатель с фазным ротором, регулирование скорости производится с помощью тири сторного преобразователя, собранного по мостовой трехфазной схеме (рис. 1а). Входные цепи преобразователя подключаются к сети через обмотки статора двигателя АХ, BY, CZ. На выход выпрямленного напряжения преобразователя подключаются обмотки ротора двигателя ax, yb. Обмотка cz может подключаться параллельно или оставаться свободной.
Управление тиристорными мостами производится таким образом, что МДС, создаваемая током в обмотках статора, всегда создает вращающий момент двигателя. Сказанное подтверждают пространственные векторные диаграммы МДС двигателя (рис. 2).
Рис. 1. Схема функциональная электропривода: а) общая схема силовых цепей; б) схема подключения обмоток фаз А и В
Рис. 2. Пространственные векторные диаграммы электродвигателя при различных положениях ротора:
а) а = 240°; б) a = 300°; в) a = 0°; г) а = 60°; д) о = 120°; е) а = 180°
Переключая тиристоры моста, токами в обмотках статора в последовательности, указанной на рис. 2, создают МДС статора, вращающуюся дискретно с шагом 60°. Эти переключения производят тогда, когда ориентация векторов МДС обмоток статора и ротора соответствует двигательному моменту.
Уравнения состояния электропривода. Математическая модель электропривода составлена на основании схемы (рис. 16). Здесь принят ряд допущений: не учитывается рассеяние потока в зазоре электродвигателя, тиристоры считаем идеальными ключами, взаимные индуктивности между фазами статора и ротора изменяются по синусоидальному закону.
Ток /, протекающий через обмотки, рассчитывается на основании уравнения:
U АВ
ач-А i d4>B । ач-Р , dt dt dt ’ где rY, гг - активные сопротивления статора и ротора; Ч*А, Ч*в, Ч^Р - потокосцепления фазы А, В и ротора.
А = ^АА ’ г + ^АВ '1 + ^АР '! ’
В ~ ^ВВ ■1 + ^АВ ' * + ^ВР '1 ;
^р — Lp-i-¥ ЬАР ■ / + LBP • i, где LAA, Lbb, LP - собственные индуктивности фаз А и В и ротора; LAP, LBP - взаимные индуктивности между ротором и фазами; LAB - взаимная индуктивность между обмотками фазы А и В.
При этом взаимные индуктивности равны: lap = lm 'cos(a);
LBp= ^м "costa + 60°), где LM - максимум взаимных индуктивностей; a - угол поворота вала.
За начальный угол возьмем угол, когда потокосцепления обмоток фазы А статора и ротора направлены в одну сторону.
Из полученных выражений можно вычислить производную тока, а по ней любым численным методом определить и значение самого тока:
di _ U^ -2 z-(rj + r2) + 2 LM i-n'(sm(a) + sin(a + 60°))
dt LM + 2 Lab + LBB +LP+2-LM ■ (cos(cr) + cos(a + 60°)) da где n =-- скорость вращения вала.
dt
Для вычисления момента воспользуемся уравнением:
, . dW d .2 v-i . ,2х
М = ---=—(> Д -I + > L, -гЛ = .
da da^ ' % 4 у
7=1
'*7
= -LM • /2 ■ [sin(cz) + sin(a + 60)].
Наконец, запишем уравнения движения вала ротора:
•М-Мс , --------dt;
J a - jndt, где Me - статический момент; J - момент инерции.
Электромеханика
Результаты расчета. Расчет проводился для двигателя MTF111-6 (Рн = 3.5 кВт; (/н = 380 В, 7Ш = 10,4 А; Му= 40 Нм; ин = 895 об/мин; /2н = 15А; т) = 70 %; J = 0,05 кг м2) который имеет следующие параметры электрической схемы: Z^ = LBB = Lcc= =0,116 Гн, Zp = 0,027 Гн, ZM = 0,098 Гн,/= 50 Гц -частота сети, LAB = LAC = LCB —0,045 Гн, Мс = 0, У = 1 кг-м2, Г) = 2,1 Ом, г2 = 0,6Ом.
За прототип были приняты естественная механическая и электромеханическая характеристики электропривода (кривые 1 на рис. 3 а, б).
с постоянным моментом статической нагрузки, близким к номинальному моменту (кривые 3), это отношение остается близким к единице. При малых нагрузках относительное значение тока возрастает, т.к. относительно большая доля приходится на намагничивающую составляющую. Так, при Мс = 0,1 величина тока статора увеличивается до 0,6...0,7 от номинального значения. Наоборот, в зоне пониженных скоростей электропривод способен развивать момент, больше критического. При этом приращение моментов опережает прираще-
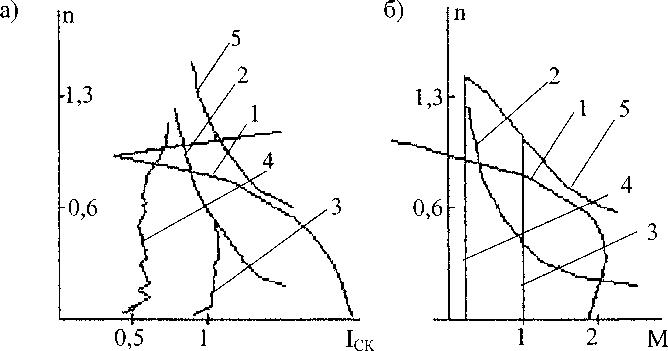
Рис. 3. Электромеханические (а) и механические (6) характеристики
Для удобства расчета все величины на рис. 3 представлены в относительных единицах: за базовое значение скорости принята синхронная скорость двигателя, за базовое значение тока статора - их номинальные значения.
Предельные механическая и электромеханическая характеристики при импульсном регулировании соответствует максимально возможным импульсам напряжения, подаваемым на статор (кривые 2 на рис. 3 а, б). Величины предельных тока и момента снижаются по мере увеличения скорости из-за влияния ЭДС вращения двигателя. Возможен разгон двигателя до скорости выше синхронной, правда, при этом существенно снижается величина момента, развиваемого электродвигателем. Обращает на себя внимание малая величина отношения тока статора к моменту (при номинальном моменте это отношение IJM =1,1), что следует объяснить близкой к ортогональной взаимной пространственной ориентации векторов МДС обмоток статора и ротора в схеме импульсного регулирования. При регулировании скорости ние токов статора: например, при М = 2,5 наблюдаем / =1,5. В районе средних скоростей кривые 2 располагаются ниже, чем 1. Это следовало предвидеть: к сети 380 В подключаются две последовательно соединенные обмотки вместо одной, как в естественной схеме. Характеристики 2 поднимаются вверх, если статорные цепи двигателя вместо Uc =380 В подключить к сети 660 В (кривые 5).
Заключение. Несмотря на импульсный характер регулирования, необходимо отметить хорошие энергетические характеристики электропривода, о чем свидетельствуют малые величины отношения ИМ. Наибольшую выгоду следует ожидать в электроприводе механизмов с тяжелыми условиями пуска и малыми затратами на обслуживание. В качестве примера можно указать на электропривод ленточных транспортеров, у которых в зимнее время резко увеличивается момент трогания, а часто требуется прокрутка механизма на пониженной скорости, чтобы предотвратить смерзание смазки в подшипниках рабочего механизма.
Усынин Юрий Семёнович в 1959 г. окончил Челябинский политехнический институт, в 1964 г. - очную аспирантуру при кафедре электропривода Московского энергетического института. Профессиональные интересы: металлургический, общепромышленный, автономный, следящий электроприводы. Доктор технических наук, профессор. Работает на кафедре электропривода ЮУрГУ.
