Импульсные регуляторы тока в электроприводах переменного тока с импульсно-векторным управлением

Автор: Усынин Юрий Семнович, Валов Артем Владимирович, Козина Татьяна Андреевна
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электромеханика
Статья в выпуске: 34 (251), 2011 года.
Бесплатный доступ
Показана целесообразность применения в электроприводах переменного тока с импульсно-векторным управлением импульсных регуляторов тока, изменяющих свои свойства при переменных скоростях вращения.
Импульсно-векторное управление, синхронные двигатели, импульсные регуляторы, псевдочастотные характеристики
Короткий адрес: https://sciup.org/147158141
IDR: 147158141
Impulse current regulators in ac electric drive with impulse-vectorial control
The applying expediency of impulse current regulators with properties variation depending on rotation speed in AC (synchronous) electric drive with impulsevectorial control is shown in the article.
Текст научной статьи Импульсные регуляторы тока в электроприводах переменного тока с импульсно-векторным управлением
Введение. Есть схемы импульсно-векторного управления [2, 4, 5], которые характеризуются малыми затратами и неплохой энергетикой, но попытка применить для них привычные замкнутые системы управления не дает желаемых результатов. Это связано с импульсным режимом работы данных приводов и меняющейся от скорости переменной частотой квантования импульсов момента. В статье рассмотрены импульсные регуляторы тока и показана их эффективность в синхронных электроприводах с импульсно-векторным управлением.
Функциональная схема синхронного электропривода с импульсно-векторным управлением может быть выполнена в двух вариантах. В первом случае (рис. 1) в цепь трехфазной обмотки статора включен тиристорный коммутатор ТК, выполненный по мостовой трехфазной схеме, в замкнутую накоротко выходную цепь постоянного тока которого включен датчик тока ДТ.
Система управления электроприводом СУ обеспечивает, во-первых, поддержание тока статора, соответствующего сигналу uЗАД , а во-вторых, сопоставляя сигналы с выхода блока определения положения обобщенного вектора напряжения сети БОП UC и с датчика положения индуктора ДПИ, разрешает коммутатору открывать пару тиристоров, принадлежащих разным группам коммутатора, только в те периоды времени, которые соответствуют двигательному моменту синхронного двигателя СД.
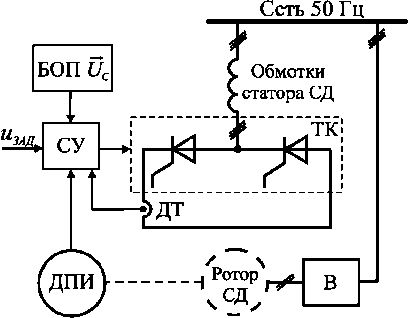
Рис. 1. Функциональная схема импульсно-векторного управления синхронным двигателем с тиристорным коммутатором ТК: ДПИ – датчик положения индуктора, ДТ – датчик тока, СУ – система управления, БОП U C – блок определения положения обобщенного вектора напряжения сети, В – возбудитель
Возбудитель В, подключенный к обмотке ротора СД, обеспечивает постоянный ток как при разгоне привода, так и в установившемся режиме работы.
По такому же принципу может работать и асинхронный двигатель с фазным ротором, переведенный в синхронный режим [4, 5].
Другая схема импульсно-векторного управления СД [2] отличается лишь элементной базой силовых цепей статора: вместо тиристорного коммутатора ТК включен диодный мост ДМ, а ток через обмотку статора регулируется транзисторным ключом КТ (рис. 2).
В импульсно-векторных системах управления создаваемый момент носит импульсный характер с переменной, зависящей от скорости частотой. Непрерывные регуляторы тока не могут приспосабливаться к переменной частоте следования импульсов тока статора, связанной с изменением скорости, а это требует применения адаптивных импульсных регуляторов.
Импульсный регулятор тока в системе импульсно-векторного управления синхронным двигателем с тиристорным коммутатором представлен на рис. 3. В обратной связи импульсного регулятора имеется ключ, который закорачивает конденсатор регулятора C ОС и устанавливает нулевые начальные значения по сигналу запрета работы регулятора U запр [4].
Временные диаграммы непрерывного и импульсного регуляторов тока в схеме импульсновекторного управления синхронным двигателем представлены на рис. 4, а, б.
Предположим, что нужное значение тока статора устанавливается подачей отпирающего импульса UУПР, сдвинутого во времени относительно напряжения сети UСЕТИ на величину t1-t0. При использовании непрерывного пропорциональноинтегрального (ПИ) регулятора тока в момент времени t1 скачком подается задание UЗТ на регулятор тока, а конденсатор CОС ПИ-регулятора тока заряжается. Когда напряжение UРТ на выходе ре- гулятора становится равным напряжению открытия тиристоров, открывается пара тиристоров, принадлежащих разным группам коммутатора, и ток начинает протекать по соответствующей цепи. В период времени от 12 до 13 (рис. 4, а) напряжение сети отрицательно, векторы МДС якоря и индуктора создают тормозной момент, тиристоры закрыты, а сигнал с датчика тока равен нулю иДТ = 0. Но задание регулятора тока по-прежнему положительно и пропорционально UЗТ, поэтому конденсатор продолжает заряжаться до напряжения питания операционного усилителя. В результате на выходе регулятора тока формируется максимальное значение UРТ, превышающее напряжение открытия тиристоров. Поэтому, когда напряжение сети снова становится положительным (момент 13, рис. 4, а), отпирающий импульс соответствует положительной полуволне напряжения (отрезок 13 - 14), тиристоры открываются с нулевым углом. В результате тиристорный коммутатор теряет управляемость, а ток в силовой цепи поддерживается максимальным. Данную ситуацию легко исправить, если обнулять напряжение на конденсаторе в отрицательные полупериоды питающего напряжения. Для этого необходимо закорачивать конденсатор в те моменты времени, когда ему не следует заряжаться.
Временные диаграммы СД с импульсновекторным управлением и импульсным регулятором тока представлены на рис. 4, б. От предыдущего случая они отличаются наличием времени задержки А 1 подачи отпирающих импульсов. Эта задержка появляется благодаря тому, что в отрицательные полупериоды 1 2 - 1 3 питающего напряжения регулятор тока РТ обнуляется.
Итак, работу импульсного регулятора тока (см. рис. 3) можно разбить на два участка: первый участок, когда ключ ИЭ1 в обратной связи регулятора тока разомкнут; второй, когда ключ замкнут. На первом участке регулятор ведет себя как обычный непрерывный ПИ-регулятор, на втором - закорочен и на выходе дает ноль.
Чтобы исследовать свойства регулятора в
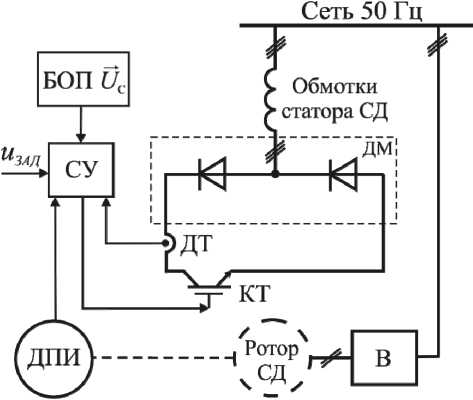
Рис. 2. Функциональная схема импульсновекторного управления синхронным двигателем с диодным мостом: КТ – ключ транзисторный; ДМ - диодный мост
Сеть 50 Гц
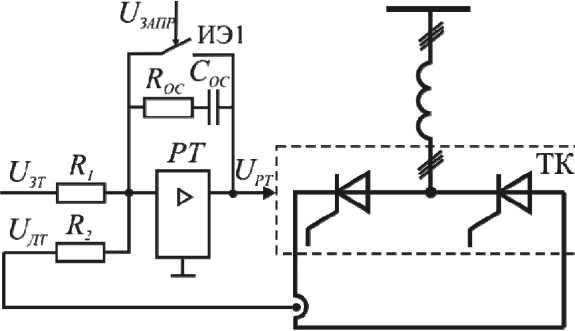
Рис. 3. Импульсный регулятор тока в схеме импульсно-векторного управления синхронным двигателем с тиристорным коммутатором
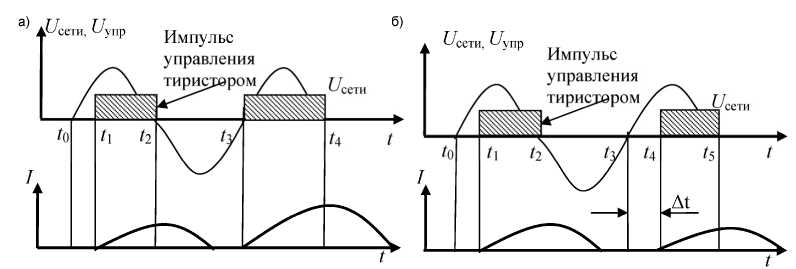
Рис. 4. Осциллограммы работы ПИ-регулятора тока: а – непрерывного; б – импульсного
«большом», т. е. на протяжении нескольких периодов работы регулятора в системе импульсновекторного управления, целесообразно применить аппарат псевдочастотных характеристик [1]. Суть данного метода заключается в том, что циклическую частоту сигнала ω , используемую для построения частотных характеристик, заменяют на псевдочастоту:
А = 2/ T,
2 л где T =— - период квантования импульсной системы.
Структурная схема контура тока с импульсным регулятором тока приведена на рис. 5. Здесь ЯЦ – эквивалент электрической цепи якоря синхронного двигателя, который можно выразить апериодическим звеном; ТК – тиристорный коммутатор, который для простоты рассуждений заменялся простым пропорциональным звеном; ДТ – датчик тока, коэффициент пропорциональности которого принимался равным единице; РТ – непрерывный ПИ-регулятор тока. Элементы ИЭ1 и ИЭ2, изображенные в виде контактов, отражают прерывистый характер протекания тока в цепи якоря: ИЭ1 характеризует импульсный режим работы регулятора тока; ИЭ2 учитывает од-нополупериодный режим выпрямления напряжения питающей сети тиристорным коммутатором.
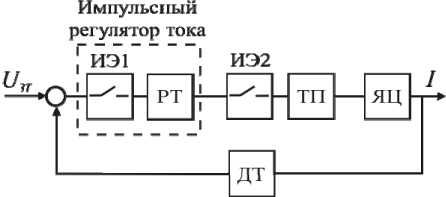
Рис. 5. Структурная схема контура тока с импульсным регулятором тока
В импульсно-векторной схеме частота квантования импульсных элементов переменна и зависит от скорости вращения двигателя, поэтому был произведен расчет для трех фиксированных скоростей (10, 40, 100 рад/c), для каждой из которых период квантования импульсного элемента ИЭ2 можно принять постоянным. Так как рассматриваемая система импульсная, то накладываются два дополнительных условия (по [1]): 1) «хвост» частотной характеристики всегда должен быть ниже прямой lg(М/(М+1)), где М – показатель колебательности нескорректированной импульсной системы; 2) частота среза замкнутой системы должна быть меньше чем 2/T. Псевдочастотные характеристики контура регулирования тока системы импульсно-векторного управления синхронным двигателем представлены на рис . 6, где на графиках изображены псевдочас-тотные характеристики разомкнутой нескорректированной системы (кривые 1) и желаемые псевдо-частотные характеристики разомкнутой скорректированной системы (кривые 2).
Характеристики нескорректированной системы (кривые 1) имеют следующие особенности: их псевдочастота среза больше псевдочастоты 2/ Т ; высокочастотный «хвост» лежит выше прямой М/ ( M + 1 ) . В результате нескорректированная импульсная система неустойчива и испытывает незатухающие колебания. Желаемые псевдочас-тотные характеристики разомкнутой скорректированной системы имеют следующие особенности: они должны пересекать ось абсцисс при псевдочастоте А ср < 2/ Т ; высокочастотный «хвост» должен лежать ниже прямой М/ ( М + 1 ) и стремиться к бесконечности при приближении псевдочастоты А к нулю. Такая характеристика соответствует астатической устойчивой системе.
Получение желаемой характеристики РТ достигается выбором типа регулятора и его параметров так, чтобы псевдочастотная характеристика разомкнутой нескорректированной системы (кривая 1) приняла вид желаемой (кривая 2). Импульсный регулятор тока является последовательным корректирующим устройством с передаточной функцией W к (р ) = (1 +Т 1 р ) /Т 2 р. Параметры Т i и Т 2 следует подбирать таким образом, чтобы псевдо-частотная характеристика произведения звеньев W к (р ) и W(р ) совпадала с желаемой псевдочастот-ной характеристикой.
Заключение. В синхронном электроприводе с импульсно-векторной системой управления момент
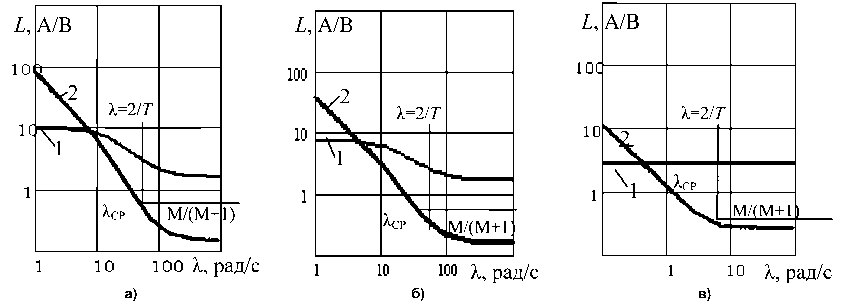
Рис. 6. Псевдочастотные характеристики контура регулирования тока КРТ при скоростях вращения: а) ш = 10 рад/с; б) ш = 40 рад/с; в) ш = 100 рад/с
носит прерывистый характер с переменной, зависящей от скорости частотой квантования. Непрерывные регуляторы тока не могут приспосабливаться к изменениям скорости, поэтому в данных электроприводах целесообразно применять импульсные регуляторы с переменной частотой квантования. Свойства такого регулятора подобны свойствам непрерывного регулятора для частот меньших половины частоты квантования. Так как в импульсных регуляторах тока параметры регулятора подстраиваются под изменяющиеся свойства системы, то они дают лучшие показатели процессов регулирования по сравнению с непрерывными регуляторами.
Список литературы Импульсные регуляторы тока в электроприводах переменного тока с импульсно-векторным управлением
- Бесекерский, В.А. Динамический синтез систем автоматического регулирования/В.А. Бесекерский. -М.: Наука, 1970. -576 с.
- Давыдкин, М.Н. Векторно-импульсный способ плавного пуска синхронных электродвигателей: автореф. дис.... канд. техн. наук/М.Н. Давыдкин. -Магнитогорск, 2010. -16 с.
- Джури, Э. Импульсные системы автоматического регулирования/Э. Джури; пер. с англ. М.А. Берманта, Ж.Л. Грина; под ред. Я.З. Цыпкина. -М.: Гос. изд-во физ.-мат. лит., 1963. -453 с.
- Пат. № 2337466 Российская Федерация, МПК Н02Р 27/05. Асинхронный электропривод с фазным ротором/Ю.С. Усынин, А.В. Валов, С.А. Чупин. -Заявл. 09.07.2007; опубл. 27.10.2008, Бюл. № 30.
- Усынин, Ю. С. Асинхронный электропривод с импульсно-векторным управлением/Ю.С. Усынин, А.В. Валов, Т.А. Козина//Электротехника. -2011. -№ 3. -С. 15-19.
- Цытович, Л.И. Элементы аналоговой и цифровой электроники в автоматизированном электроприводе: учебник для вузов/Л.И. Цытович. -Челябинск: ЮУрГУ, 2001. -С. 37.
