Индукционный датчик линейных перемещений с отрицательной обратной связью по потокосцеплению обмотки возбуждения

Автор: Попов Анатолий Петрович, Чугулв Александр Олегович, Винокуров Михаил Романович
Журнал: Advanced Engineering Research (Rostov-on-Don) @vestnik-donstu
Рубрика: Технические науки
Статья в выпуске: 2-1 (63) т.12, 2012 года.
Бесплатный доступ
Рассмотрен индукционный датчик линейных перемещений, обладающий высокой температурной стабильностью выходной характеристики. Выполнено моделирование электромагнитного поля в датчике с помощью программы Elcut, в ходе которого доказана стабилизация его выходной характеристики в широком температурном диапазоне.
Индукционный датчик, обмотка стабилизации, потокосцепление, температурная стабилизация
Короткий адрес: https://sciup.org/14249796
IDR: 14249796 | УДК: 621.317
Induction gage of degenerative linear displacements on flux linkage of drive winding
The induction gage of linear displacements with high temperature stability of the output characteristic is presented. The electromagnetic field in the device is simulated through Elcut programme. As a result, the stability of its output characteristic over a wide temperature range is proved.
Текст научной статьи Индукционный датчик линейных перемещений с отрицательной обратной связью по потокосцеплению обмотки возбуждения
Введение. Существуют области техники, в которых требуется измерять малые перемещения различных объектов в условиях изменения температуры в широких пределах, при этом непрерывный режим работы может протекать в течение длительного времени, вплоть до нескольких месяцев. Для данных целей могут быть использованы индукционные датчики линейных перемещений, которые характеризуются простотой конструкции, высокой чувствительностью, надёжностью и, как будет показано ниже, могут обладать высокой температурной стабильностью.
Известно, что температура оказывает существенное влияние на полное потокосцепление обмотки возбуждения (ОВ) датчиков такого типа и, соответственно, на его выходной сигнал. Так, изменение сопротивления обмотки возбуждения может привести к изменению тока возбуждения, а изменение магнитной проницаемости и удельной проводимости материала магнитопровода влияют на индуктивность ОВ и взаимную индуктивность, определяющую выходной сигнал датчика линейных перемещений. Поэтому, если не принимать специальных мер по температурной компенсации, то получить достоверную информацию об измеряемом параметре будет невозможно.
Обычно возбуждение индукционных датчиков осуществляется с использованием операционных усилителей. При этом часто в таких устройствах предусмотрена стабилизация режима работы за счёт отрицательной обратной связи (ООС) по току. Однако такой способ не обеспечивает компенсацию влияния изменения температуры окружающей среды на выходной сигнал, что связано, как указывалось выше, с изменением индуктивности обмотки возбуждения L ОВ под влиянием температуры и, соответственно, потокосцепления Т ОВ (Т ОВ = к ОВчОВ ). Известен также другой способ осуществления ООС по напряжению на обмотке возбуждения, который позволяет стабилизировать лишь суммарное напряжение на обмотке возбуждения, составляющими которого являются величина ЭДС и напряжение, обусловленное активными потерями (сопротивление меди обмоток и гистерезистные явления).
Метод исследования. В данной работе предложен новый способ температурной компенсации выходного сигнала. Суть этого способа заключается в стабилизации потокосцепления обмотки возбуждения (ОВ) за счёт применения обмотки стабилизации (обмотки ООС), которая наматывается одновременно с ОВ двойным проводом, что обеспечивает коэффициент связи этих обмоток, близкий к единице, и тем самым позволяет обеспечить температурную компенсацию.
В состав такого устройства входят следующие элементы (рис.1): 1 – генератор возбуждения, вырабатывающий сигнал повышенной частоты иВ; 2 - операционный усилитель (ОУ); 3 - об- мотка возбуждения (ОВ); 4 – обмотка стабилизации (обмотка ООС) (обмотки 3 и 4 наматываются одновременно двойным проводом с целью получения равных по величине потокосцеплений обмотки ООС и ОВ); 5 – подвижный сердечник; 6 – сигнальная обмотка, которая состоит из двух секций, включенных последовательно встречно и смещённых относительно друг друга в осевом направлении.
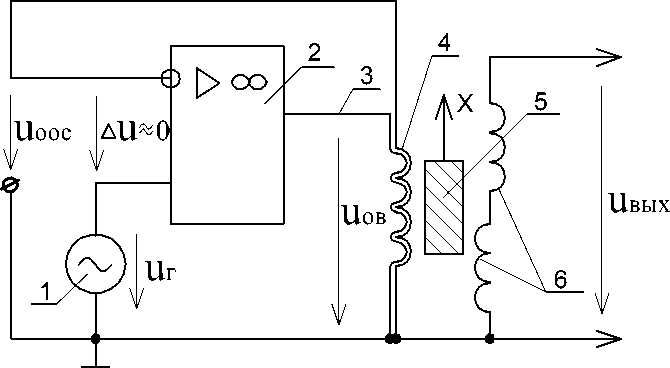
Рис.1. Принципиальная электрическая схема термостабильного индукционного датчика линейных перемещений
Стабилизация потокосцепления обмотки возбуждения датчика достигается путём введения 100% ООС с помощью обмотки стабилизации. Благодаря вышеуказанным особенностям конструкции обмоток датчика, ЭДС, наводимая в обмотке стабилизации, будет определяться выраже- нием:
u ООС —
d T ов dt .
С учётом того, что ОУ обладает коэффициентом усиления по напряжению KU>>1, управляющее напряжение этого усилителя, как известно [1], ∆u ≈ 0 (см. рис.1). Здесь необходимо отметить, что частота сигнала генератора возбуждения должна лежать в пределах полосы пропускания ОУ. Ис- ходя из этого справедливо выражение:
d T oB u ООС — u В = dt .
Данное равенство будет выполняться независимо от параметров датчика, изменяющихся под влиянием температуры или других факторов, путём соответствующего изменения тока в обмотке возбуждения за счёт введения обмотки ООС. Таким образом, обеспечивая стабильность выходного напряжения генератора возбуждения и Г , достигается постоянство потокосцепления обмотки возбуждения.
В данных условиях амплитуда ЭДС, индуцируемой на секциях сигнальной обмотки датчика, будет зависеть только от взаимного расположения сердечника и сигнальной обмотки (т.е. от коэффициентов магнитной связи обмотки возбуждения и секций сигнальной обмотки). Однако следует учитывать, что вышесказанное справедливо лишь в том случае, когда можно пренебречь влиянием тока сигнальной обмотки, т.е. для случая высокоомной нагрузки.
При симметричном размещении сердечника относительно обеих секций сигнальной обмотки коэффициент связи обмотки возбуждения с ними одинаков, при смещении сердечника коэффициент связи с одной из секций уменьшается, с другой – увеличивается, что и определяет выходной сигнал датчика линейных перемещений.
На рис.2 представлена модель датчика, созданная в современной версии программы ELCUT , в основе работы которой лежит метод конечных элементов [2, 3]. Рассматриваемая задача расчёта магнитного поля переменных токов является осесимметричной.
сигнальная обмотка
обмотка возбуждения
y/////X7>V////M/////
/, оооооооооооооооооооооооооооооооооозооооо /
оооооооооооооооооооорооооооооооооооооооо
Я iS
OOOOOOOOOOOOPOOOOOOOOQOOQOOOOOOOOOOOOOOO 00000000000060000оооооооооооооооооооо000
ОО OOOOOOOOOOQOO ОО ООООО 08000000ООООООО ООО
ooooooooooooopooo 00000000000000000 00000000000000000
ОООООOOOOOOOOOООО oocioooooooooooooo 00000000000000000
ось симметрии
6 8 10
X, мм
подвижный
сердечник
магнитопровод
Рис.2. Модель датчика линейных перемещений
В качестве исходных данных для моделирования заданы:
-
- частота тока в обмотке возбуждения (ОВ) f = 5000 Гц;
-
- амплитудное значение тока ОВ I ОВ = 0,015 А;
-
- количество витков обмотки возбуждения WОВ = 215;
-
- количество витков секций сигнальной обмотки W1 = 54; W2 = 54;
-
- сопротивление обмотки возбуждения Rов = 0,940 Ом (материал – медь);
-
- относительная магнитная проницаемость магнитопровода и сердечника μ = 1200 (материал – феррит 1000НМ при T = 0 °C);
-
- удельные проводимости магнитопровода и сердечника γ = 0 См/м;
-
- положение подвижного сердечника Х =0 (что соответствует симметричному его размещению относительно обеих секций сигнальной обмотки).
При моделировании численное значение обмотки возбуждения поддерживалось постоянным во всех режимах работы путём задания величины тока обмотки возбуждения.
С помощью созданной модели выполнен расчёт потокосцеплений обмоток датчика, а также значений ЭДС на выходе сигнальной обмотки в зависимости от положения подвижного сердечника для различных значений активного сопротивления обмотки возбуждения (соответствующих температурному диапазону от -40 до +150 °С) [4, 5] и магнитной проницаемости магнитопровода.
На рис.3 в качестве примера представлена картина силовых линий индукции магнитного поля датчика при смещении сердечника на величину Х = 6 мм, а на рис.4-6 даны графики выходных характеристик датчика при различных температурных режимах его работы. Результаты расчётов приведены в таблице.
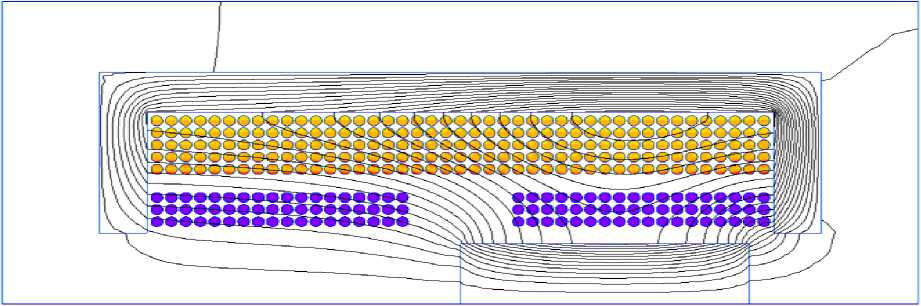
Рис.3. Картина магнитного поля датчика при положении сердечника Х = 6 мм
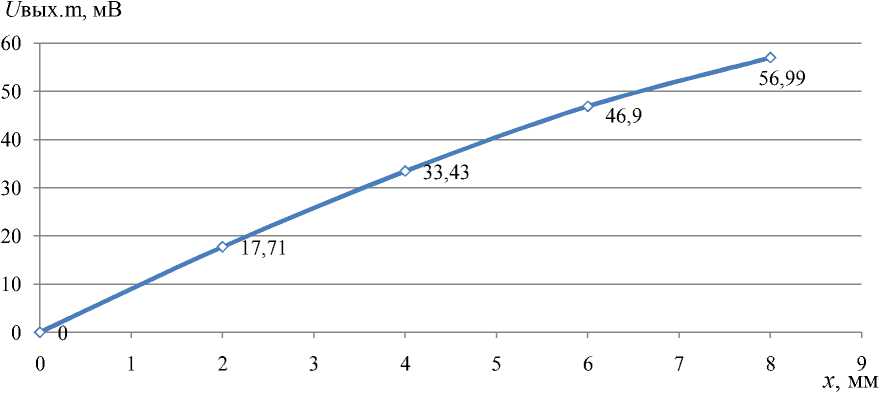
Рис.4. Зависимость выходного напряжения сигнальной обмотки при R ов = 0,778 Ом; μ отн = 900 ( T = –40 °C); U вых.т = ω ( ψ 2 - ψ 1 )
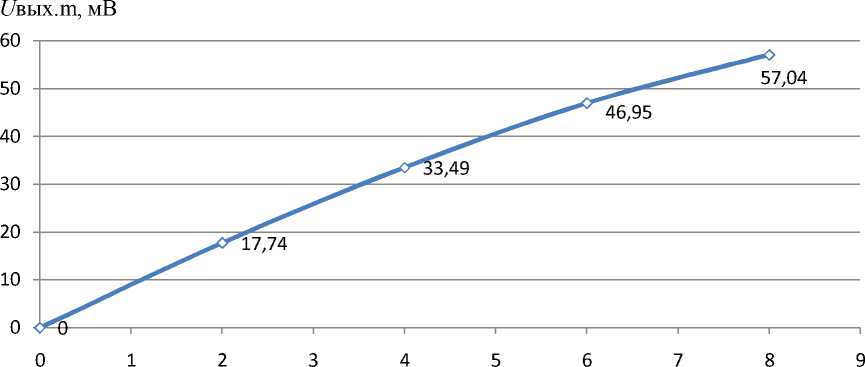
Рис.5. Зависимость выходного напряжения сигнальной обмотки при R ов = 0,940 Ом, μ стали = 1200 ( T = 0 °C)
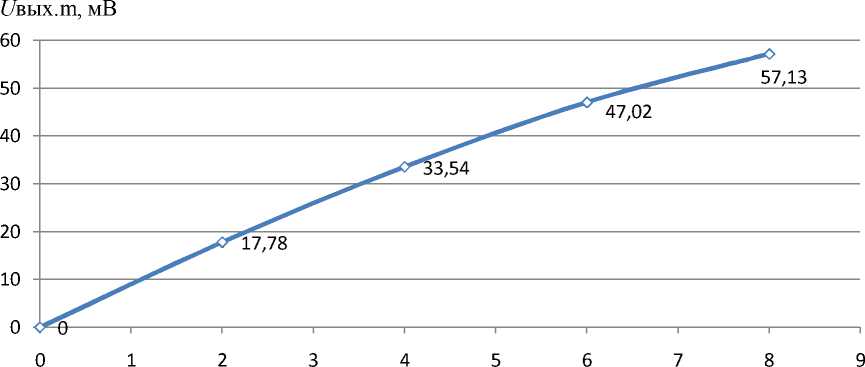
Рис.6. Зависимость выходного напряжения сигнальной обмотки при R ов = 1,546 Ом, μ стали = 2000 ( T = 150 °C)
Значения потокосцеплений обмоток датчика в зависимости от положения сердечника, проводимости материала обмоток и относительной магнитной проницаемости магнитопровода
|
Х , мм |
Активное сопротивление обмотки возбуждения R ов , , Ом |
Относительная магнитная проницаемость материала магнитопровода и сердечника μ стали |
Амплитудное значение силы тока в обмотке возбуждения I ОВ , А |
Амплитудное значение потокосцепления обмотки возбуждения Ψ ОВ , Вб |
Амплитудное значение потокосцепления 1-й секции сигнальной обмотки Ψ1, Вб |
Амплитудное значение потокосцепления 2-й секции сигнальной обмотки Ψ2, Вб |
Амплитудное значение ЭДС сигнальной обмотки *U вых.m , мВ |
|
T = –40 °C |
|||||||
|
0 |
0,778 |
900 |
0.01500 |
9.034e-6 |
1.241e-6 |
1.241e-6 |
0 |
|
2 |
0,778 |
900 |
0.01499 |
9.035e-6 |
9.790e-7 |
1.543e-6 |
17.71 |
|
4 |
0,778 |
900 |
0.01491 |
9.035e-6 |
7.932e-7 |
1.857e-6 |
33.43 |
|
6 |
0,778 |
900 |
0.01457 |
9.035e-6 |
6.840e-7 |
2.177e-6 |
46.90 |
|
8 |
0,778 |
900 |
0.01413 |
9.033e-6 |
6.200e-7 |
2.434e-6 |
56.99 |
|
T = 0 °C |
|||||||
|
0 |
0.940 |
1200 |
0.01499 |
9.034e-6 |
1.241e-6 |
1.241e-6 |
0 |
|
2 |
0.940 |
1200 |
0.01497 |
9.034e-6 |
9.790e-7 |
1.544e-6 |
17.74 |
|
4 |
0.940 |
1200 |
0.01488 |
9.035e-6 |
7.928e-7 |
1.859e-6 |
33.49 |
|
6 |
0.940 |
1200 |
0.01455 |
9.035e-6 |
6.837e-7 |
2.178e-6 |
46.95 |
|
8 |
0.940 |
1200 |
0.01411 |
9.034e-6 |
6.196e-7 |
2.435e-6 |
57.04 |
|
T = 150 0C |
|||||||
|
0 |
1.546 |
2000 |
0.01497 |
9.035e-6 |
1.240e-6 |
1.240e-6 |
0 |
|
2 |
1.546 |
2000 |
0.01494 |
9.034e-6 |
9.790e-7 |
1.545e-6 |
17.78 |
|
4 |
1.546 |
2000 |
0.01484 |
9.035e-6 |
7.924e-7 |
1.86e-6 |
33.54 |
|
6 |
1.546 |
2000 |
0.01456 |
9.035e-6 |
6.837e-7 |
2.178e-6 |
47.02 |
|
8 |
1.546 |
2000 |
0.01412 |
9.033e-6 |
6.196e-7 |
2.435e-6 |
57.13 |
Выводы. В результате моделирования электромагнитного поля рассматриваемого индукционного датчика линейных перемещений в программе Elcut доказана температурная стабилизация его выходной характеристики за счёт применения ООС по скорости изменения потокосцепления ОВ. Температурная нестабильность выходного сигнала датчика при неизменном положении сердечника в температурном диапазоне от –40° до +150° не превышает 4·10–3 % на 1 °С (при использовании в качестве материала магнитопровода и сердечника феррита 1000 НМ). Указанная температурная погрешность обусловлена зависимостью магнитной проницаемости материала магнито- провода и, соответственно, потока рассеяния от температуры. Таким образом, одним из основных способов получения максимальных показателей температурной стабильности датчика при использовании ООС по скорости изменения потокосцепления ОВ является минимизация воздушных зазоров в устройстве.
Список литературы Индукционный датчик линейных перемещений с отрицательной обратной связью по потокосцеплению обмотки возбуждения
- Хоровиц П. Искусство схемотехники/П. Хоровиц, У. Хилл: пер. с англ. -5-е изд., перераб. -М.: Мир, 1998.
- Сильвестр П. Метод конечных элементов для радиоинженеров и инженеров-электриков/П. Сильвестр, Р. Феррари: пер. с англ. -М.: Мир, 1986. -229 с.
- Попов А.П. Расчёт электрических и магнитных полей методом конечных элементов с применением комплекса программ ELCUT: учеб. пособие/А.П. Попов [и др.]. -Омск: Изд-во ОмГТУ, 2010. -84 с.
- Пасынков В.В. Материалы электронной техники: учебник/В.В. Пасынков, В.С. Сорокин. -3-е изд. -СПб.: Издательство «Лань», 2001. -368 с.
- Преображенский А.А. Магнитные материалы и элементы: учебник/А.А. Преображенский, Е.Г. Бишард. -3-е изд., перераб. и доп. -М.: Высш. шк., 1986 -352 с.
