Информационно-управляющая система российского сегмента Международной космической станции

Автор: Воронин Федор Андреевич
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации
Статья в выпуске: 4 (31), 2020 года.
Бесплатный доступ
Рассматривается разработка информационно-управляющей системы (ИУС) Российского сегмента Международной космической станции (РС МКС). Информационно-управляющая система служит для обеспечения проведения космических экспериментов в автоматическом или ручном режиме управления от экипажа. В целях создания высокотехнологичных условий проведения научных исследований на РС МКС в РКК «Энергия» ведутся работы по модернизации ИУС на служебном модуле, созданию ИУС на планируемом многоцелевом лабораторном модуле «Наука» и научно-энергетическом модуле. В работе рассмотрены этапы и принципы модернизации ИУС. Практическим результатом модернизации ИУС служебного модуля стало проведение ряда высокотехнологичных научных экспериментов. В 2014 г. на МКС были установлены две съёмочные камеры. В настоящее время идёт подготовка к лётным испытаниям эксперимента с научной аппаратурой «Икарус». Опыт, полученный в ходе проведения экспериментов, позволяет утверждать, что ИУС РС МКС станет современной системой, позволяющей в автоматическом режиме реализовывать самые амбициозные космические эксперименты на базе МКС.
Информационно-управляющая система, мкс, космические эксперименты, научная аппаратура
Короткий адрес: https://sciup.org/143177938
IDR: 143177938 | УДК: 004.3:004.41:004 | DOI: 10.33950/spacetech-2308-7625-2020-4-104-111
Information control system of the Russian segment of the International Space Station
The development of Information Control System (ICS) of the Russian Segment of the International Space Station (ISS RS) is considered. This ICS is intended for automatic and manual control of space experiments. To create high-tech conditions for scientific experiments on the ISS RS, RSC Energia performs operations for the ICS modernization on the Service Module, as well as the creation of ICS on the planned Multipurpose Laboratory Module and Science Power Module. The ICS modernization phases and principles are reviewed. The conduct of a series of high-tech scientific experiments was a practical result of the Service Module ICS modernization. In 2014 two cameras were installed on the ISS. Today scientific experiment Icarus is being prepared for flight tests. The experience gained during experiments carried out allows to suggest that the ISS RS ICS will become a modern system allowing to implement the most ambitious experiments in the automatic mode on the ISS.
Текст научной статьи Информационно-управляющая система российского сегмента Международной космической станции
Со времен запуска первых орбитальных станций и до сегодняшнего дня одним из перспективнейших направлений использования ракетно-космической техники является проведение научных космических экспериментов (КЭ) [1]. Схема проведения экспериментов менялась с течением времени. Первые эксперименты, проводимые на орбитальной станции «Салют», представляли собой выполнение измерений, передачу данных на Землю и их запись на магнитные носители для дальнейшей передачи постановщику КЭ. С запуском станций «Салют-4» и особенно «Салют-6, 7» данный подход изменился, появились первые средства для управления, контроля, экспресс-обработки научной информации в Центре управления полётами (ЦУП), что привело к появлению термина «управляемый эксперимент» [2]. Данный подход позволил повысить качество получаемых научных данных. При выполнении экспериментов на орбитальном комплексе «Мир» появилась возможность передавать научную информацию некоторым постановщикам и участникам исследований благодаря наличию специальных каналов связи между ЦУП и, например, Институтом космических исследований РАН, европейскими центрами управления и др. [3].
Проведение управляемых экспериментов на мкС
В настоящее время главной площадкой для реализации управляемых экспериментов является Международная космическая станция (МКС). По сравнению со своими предшественниками (станции «Салют», «Мир») созданию МКС сопутствовало существенное развитие вычислительной техники, что значительно расширило возможности по реализации управляемых экспериментов [3].
Ранее процесс создания информа-ционно-управляющих систем (ИУС) и их программного обеспечения (ПО) для проведения научных экспериментов на долговременных орбитальных станциях не регламентировался формализованными технологиями. В связи с увеличением количества проводимых на борту МКС экспериментов необходимо было уйти от частного подхода при их реализации и разработать открытую автоматическую систему, позволяющую легко интегрировать новые эксперименты в её состав, унифицировав вопросы управления и контроля работоспособности экспериментальной аппаратуры.
Ключевыми модулями Российского сегмента (РС) МКС для проведения КЭ являются служебный модуль (СМ) и планируемые многоцелевой лабораторный модуль «Наука» (МЛМ), научно-энергетический модуль (НЭМ) [1]. В целях создания высокотехнологичных условий проведения научных исследований на РС МКС в РКК «Энергия» ведутся работы по созданию информационно-управляю-щей системы на новых модулях, модернизации на уже существующих и объединению их вместе с бортовым комплексом управления (БКУ) в единую информационную среду [4, 5].
ИУС представляет собой отдельную по отношению к БКУ систему, которая непосредственно отвечает за выполнение целевой функции МКС. В целом управление научной аппаратурой на станции строится по иерархическому принципу.
Верхним уровнем управления по отношению к ИУС являются БКУ РС МКС и наземный комплекс управления. ИУС, в свою очередь, управляет непосредственно комплексом целевых нагрузок, являющимся самым нижним уровнем в данной иерархии. Другими словами, БКУ отвечает за функционирование и управление РС МКС в целом, а ИУС реализует целевую функцию станции — проведение научных экспериментов посредством комплекса целевых нагрузок.
Ключевым элементом ИУС, обеспечивающим координированное управление и контроль полезных нагрузок, является бортовая цифровая вычислительная система. В состав задач данной системы входят:
-
• получение управляющих команд и информационных ресурсов из БКУ, их дешифровка, обработка и маршрутизация в аппаратуру целевых нагрузок;
-
• предоставление вычислительных ресурсов для реализации алгоритмов управления оборудованием целевых нагрузок;
-
• сбор по цифровым интерфейсам телеметрической и статусной информации от аппаратуры целевых нагрузок, её кодировка и передача через БКУ по радиоканалам на наземные пункты управления;
-
• управление и контроль бортовыми средствами электропитания комплекса целевых нагрузок;
-
• приём информации о результатах работы научной аппаратуры, её временное хранение и маршрутизация для сброса на наземные станции с использованием имеющихся на борту МКС радио-
- средств, обеспечивающих возможности передачи больших массивов данных.
Следует отметить, что обеспечение работы полезных нагрузок имеет ряд ключевых особенностей. В первую очередь, это изменчивость состава аппаратуры — аппаратура одних экспериментов доставляется на борт, другая отключается в связи с окончанием тех или иных экспериментов. Таким образом, состав научной аппаратуры может значительно изменяться с течением времени.
Другой ключевой особенностью является то, что научная аппаратура в большинстве случаев поставляется сторонними организациями, имеет разные количественные и качественные составы, различные интерфейсы обмена данными и различную программную реализацию. Таким образом, ИУС должна иметь возможность интегрировать в состав комплекса целевых нагрузок абсолютно разную аппаратуру и уметь учитывать специфику её функционирования.
В качестве аппаратной платформы был спроектирован сотрудниками РКК «Энергия» и изготовлен в компании «Элкус» (г. Санкт-Петербург) компьютер БКИПН (блок контроля интерфейсов полезных нагрузок) (рис. 1). Компьютер обладает следующими характеристиками:
-
• процессор Celeron 400 МГц;
-
• оперативная память 512 Мб;
-
• твердотельные диски 8 и 32 Гб;
-
• две платы CAN-200РС104 (по два канала CAN -интерфейса на каждой плате);
-
• интерфейсная плата, обеспечивающая поддержку интерфейса MIL STD 1553B и выдачу 48 дискретных команд типа «сухой контакт» и восьми телеметрических сигналов типа «ключ»;
-
• два канала RS422 ;
-
• один канал интерфейса Ethernet 10/100 Base T ;
-
• два канала интерфейса USB1.1; 8-bit Digital I/O Port .
Семь компьютеров БКИПН планируется использовать в качестве вычислительных средств в ИУС СМ и МЛМ РС МКС. Следует отметить, что использование вычислительных средств одной модели позволит повысить аппаратную надежность системы и обеспечит её унификацию [4].
Программное обеспечение для компьютеров ИУС на новой аппаратной платформе было разработано в РКК «Энергия» с участием автора. Основными принципами разработки ПО являлись его модульность и возможность унификации для различных компьютеров ИУС.

Рис. 1. Внешний вид компьютера БКИПН (блок контроля интерфейсов полезных нагрузок)
Так как ИУС состоит из совокупности однотипных взаимозаменяемых компьютеров, одним из ключевых требований при разработке ПО является его максимальная унификация. Ввиду вышеописанных особенностей ИУС, при проектировании ПО необходимо было обеспечить решение ряда ключевых задач. Во-первых , непостоянство целевой аппаратуры накладывает требование на обеспечение программной поддержки периодически меняющегося состава полезных нагрузок с минимальными затратами на создание и верификацию нового ПО. Во-вторых , имеющийся набор различных логических и физических интерфейсов диктует необходимость обеспечения программной поддержки каждого интерфейса. В-третьих , предъявляется одно из базовых требований для всех управляющих бортовых компьютеров — работа в режиме реального времени.
Для обеспечения унификации ПО между всей совокупностью имеющихся бортовых компьютеров ИУС на различных модулях МКС оно было разделено на две основные части: ядро ПО и функциональное ПО.
Ядро ПО представляет собой неизменное базовое ПО, одинаковое для всех компьютеров ИУС. В базовом ПО реализованы функционал приёма управляющей информации, базового конфигурирования для применения на различных компьютерах и различных модулях, служба времени, служба диспетчеризации компонентов ПО, формирование телеметрических массивов, обеспечение функционального ПО имеющимся набором интерфейсов.
Функциональное ПО, в свою очередь, является уникальным и используется для непосредственного управления и контроля каждой полезной нагрузки. Функциональное ПО разрабатывается индивидуально для каждой конкретной полезной нагрузки, учитывает специфику её функционирования и принципы управления.
Другими словами, базовое ПО создано безотносительно специфики управления конкретными полезными нагрузками, а непосредственно вся реализация определенного КЭ сосредоточена в функциональном ПО, которое отдельно создается для каждой полезной нагрузки. При таком разделении базовое ПО только предоставляет общие интерфейсы — обмен данными по интерфейсам MIL STD 1553B, CAN, Ethernet, RS-422 , маршрутизацию данных, приём команд управления, выдачу телеметрии и т. п. Эти программные компоненты предоставляют весь необходимый набор функций, которые используются ПО для управления конкретной специфической научной аппаратурой.
В новом компьютере ИУС СМ стала доступна информация о текущем угловом и пространственном положении МКС, которая поступает непосредственно из системы управления движением и навигации с минимальными задержками. Это открыло путь к проведению различных сложных КЭ по наблюдению за земной поверхностью и атмосферой, за Солнцем и другими космическими объектами. Следует заметить, что компьютер ИУС использует данную информацию не только в алгоритмах управления полезными нагрузками, но и передает её по каналу Ethernet всем заинтересованным потребителям, имеющим соответствующий интерфейс приёма и передачи данных.
Наличие базового ПО со стандартными интерфейсами для всех компьютеров ИУС РС МКС значительно упрощает и сокращает сроки его разработки и отработки, а также уменьшает затраты на последующее сопровождение. При этом значительно унифицируются и удешевляются наземные средства, необходимые для его отладки [5, 6].
этапы разработки иуС мкС
Запланирована поэтапная разработка ИУС. В настоящее время решаются задачи первого этапа — вопросы модернизации ИУС на СМ РС МКС. На СМ уже установлен компьютер ТВМ1-Н СМ – это компьютер БКИПН и разработанное ПО [7].
На втором этапе все существующие компьютеры ИУС СМ будут заменены на компьютеры БКИПН.
На третьем этапе должны быть решены задачи разработки ИУС МЛМ [1]. В состав ИУС МЛМ входят три компьютера ТВМ1-Н, ТВМ2-Н, ЦВМ-Н. Все приборы объединены в сеть Ethernet , обеспечивают обмен с научной аппаратурой по шине CAN внутри и снаружи гермоотсека. В отличие от СМ, где вопрос места установки научной аппаратуры прорабатывается индивидуально, в ИУС МЛМ предусмотрены универсальные места, предоставляющие механические, электрические и информационные интерфейсы специально для подключения научной аппаратуры.
Четвертый этап модернизации ИУС будет выполнен после введения НЭМ в состав РС МКС [1]. Таким образом, после запуска модулей МЛМ и НЭМ на РС МКС будет организована единая локальная вычислительная сеть управления научной аппаратурой и проведения экспериментов, которая обеспечит возможность использования аппаратных и информационных ресурсов одного модуля для проведения экспериментов на других.
В результате первого этапа модернизации ИУС появилась возможность проведения ряда высокотехнологичных научных экспериментов.
результаты эксплуатации иуС
В 2013 г. был проведен эксперимент «Дальность», целями которого являлись исследование и использование сигналов системы глобального времени с борта МКС для уточнения параметров орбитального движения [8]. Результаты эксперимента применяются при создании наземных систем определения параметров орбитального движения космического аппарата, использующих беззапросные измерения наклонной дальности и радиальной скорости. Управление и контроль аппаратуры эксперимента «Дальность» осуществлялись с компьютера ТВМ1-Н СМ. Дополнительно компьютер ТВМ1-Н СМ осуществлял обработку баллистиконавигационной информации в формат, необходимый для аппаратуры эксперимента «Дальность».
В 2014 г. совместно с канадской компанией UrtheCast начался эксперимент по дистанционному зондированию Земли с помощью системы оптических телескопов «Напор-МиниРСА» [9]. Система оптических телескопов представляет собой две камеры, установленные на борту РС МКС. Первая камера среднего разрешения устанавливается неподвижно на внешней поверхности СМ по направлению в надир. Камера предназначена для съёмки поверхности и получения изображений в виде полос шириной 37,7 и 47,4 км с проекцией пикселя на поверхность Земли 5,4 м (для высоты орбиты 350 км). Вторая камера высокого разрешения устанавливается на двухосную платформу наведения (ДПН) (рис. 2). Данная камера предназначена для видеосъёмки участка подстилающей поверхности размером 5,36x3,56 км с проекцией пикселя на поверхность Земли 1,15 м (для высоты орбиты 350 км) со скоростью три кадра в секунду (время экспозиции одного кадра 0,3 с). Установка на поворотной платформе позволяет осуществлять слежение за точкой на земной поверхности, небесным телом и снимать видеоизображения выбранного объекта. При реализации данного эксперимента ТВМ1-Н СМ осуществляет наведение ДПН на цели съемки, обеспечивает управление и контроль аппаратуры системы оптических телескопов.
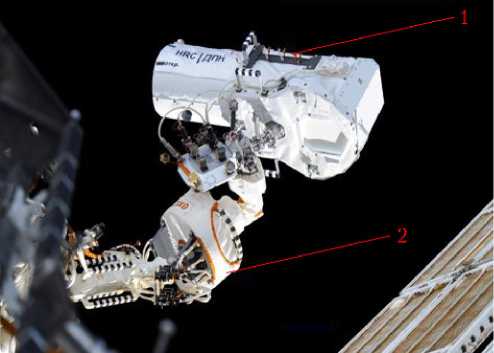
Рис. 2. Двухосная платформа наведения и камера высокого разрешения: 1 — камера высокого разрешения; 2 — двухосная платформа наведения
В настоящее время совместно с Германским центром авиации и космонавтики ( DLR ), институтом орнитологии Макса Планка, немецкой компанией SpaceTech GmbH проводятся лётные испытания научной аппаратуры «Икарус» КЭ «Ураган» [10]. Главной задачей эксперимента является слежение за перемещением животных, на которых закреплены датчики. На внешней поверхности МКС установлена антенна, предназначенная для приёма информации от датчиков с их местоположением. Компьютер ТВМ1-Н СМ отвечает за управление приборами, принимающими данные от датчиков.
заключение
В статье была рассмотрена модернизация информационно-управляющей системы Российского сегмента МКС. В процессе проведения экспериментов компьютер ТВМ1-Н СМ зарекомендовал себя как надёжное вычислительное средство, предоставляющее широкий набор интерфейсов для подключения научной аппаратуры, а выбранный подход к проектированию ПО позволит интегрировать в него алгоритмы по управлению будущей научной аппаратурой и обеспечит проведение модернизации ИУС.
Разработана архитектура ИУС на основе унифицированных аппаратно-программных средств с возможностью её последующего расширения на новых модулях РС МКС, что существенно отличает её от средств контроля и управления научной аппаратурой, существующих на МКС, где каждый компьютер был уникальным и не предполагал унификации.
Разработаны универсальные протоколы обмена между научной аппаратурой и компьютерами ИУС РС МКС.
Разработано программное обеспечение для компьютеров ИУС на новой аппаратной платформе с учётом принципов его модульности и возможности унификации для различных компьютеров ИУС. Новизной, относительно программного обеспечения, разрабатываемого для компьютеров МКС, является возможность использования «ядра» ПО ИУС на всех компьютерах без его повторной разработки.
Ключевой особенностью и новизной является то, что новый компьютер ТВМ1-Н СМ передаёт информацию о текущем угловом и пространственном положении МКС по каналу Ethernet всем заинтере- сованным потребителям. Практика проведения научных экспериментов на борту МКС показала, что указанный набор данных достаточен практически для любого проводимого эксперимента. Передаваемые параметры движения МКС позволяют определять её текущее положение и ориентацию, а также экстраполировать данные параметры на заданное время.
Разработка новой ИУС позволила эффективно выполнить ряд новых приоритетных КЭ на РС МКС и получить научные результаты исследований.
Опыт, полученный в ходе первого этапа модернизации, позволяет утверждать, что созданная на новых принципах и оборудовании ИУС Российского сегмента МКС станет современной системой, позволяющей в автоматическом режиме реализовывать самые амбициозные космические эксперименты на МКС, которая является уникальной космической лабораторией. Эффективность проведённой модернизации подтверждается результатами, полученными в ходе сопровождения космических экспериментов с использованием ИУС.
Список литературы Информационно-управляющая система российского сегмента Международной космической станции
- Микрин Е.А. Перспективы развития отечественной пилотируемой космонавтики (к 110-летию со дня рождения С.П. Королёва) // Космическая техника и технологии. 2017. № 1(16). С. 5-11.
- Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. М.: Машиностроение, 1984. 264 с.
- Беляев М.Ю. Пути и методы повышения эффективности целевого использования орбитальных станций / В сб. "Проблемы и задачи повышения эффективности программ исследований на космических кораблях и орбитальных станциях" // Ракетно-космическая техника. Труды. Королёв: РКК "Энергия". 2011. Сер. XII. Вып. 1-2. С. 16-27.
- Микрин Е.А., Марков А.В., Сорокин И.В., Гусев С.И., Путан Д.Б., Дунаева И.В. Применение новых информационных технологий для повышения эффективности целевого использования Российского сегмента МКС / Материалы XXXVI академических чтений по космонавтике // Комиссия РАН по разработке научного наследия пионеров освоения космического пространства. М.: 2012. С. 449-450.
- Воронин Ф.А., Пахмутов П.А., Сумароков А.В. О модернизации информационно-управляющей системы Российского сегмента Международной космической станции // Вестник МГТУ им. Н.Э. Баумана. Сер. Приборостроение. 2017. № 1. C. 109-122. DOI: 10.18698/0236-3933-20171-109-122
- Воронин Ф.А., Харчиков М.А. Сопровождение проведения научных экспериментов на Международной космической станции (на примере эксперимента "Напор-Мини РСА") // РАН, ГК "Роскосмос", Комиссия РАН по разработке научного наследия пионеров освоения космического пространства, МГТУ им. Н.Э. Баумана. М.: МГТУ им. Н.Э. Баумана, 2015. 363 с.
- Воронин Ф.А., Дунаева И.В. Информационно-управляющая система для проведения научных экспериментов на Международной космической станции // Вестник Самарского университета. Аэрокосмическая техника, технологии и машиностроение. 2017. Т. 16. № 1. С. 20-30. DOI: 10.18287/2541-7533-2017-16-1-20-30
- Харчиков М.А., Воронин Ф.А., Карташев С.В. Программно-математическая модель прибора GTS-2, установленного на РС МКС // Молодежный научнотехнический вестник. Электронный журнал. Издательство МГТУ им. Н.Э. Баумана. 2014. № 7. С. 489-495.
- Микрин Е.А., Гусев С.И., Дунае -ва И.В, Воронин Ф.А., Пахмутов П.А., Карташев С.В. Реализация на РС МКС эксперимента по дистанционному зондированию Земли с помощью системы оптических телескопов // Труды ХХХ1Х Академических чтений по космонавтике. Москва, январь 2015 г. С. 402.
- Беляев М.Ю., Викельски М., Лампен М., Легостаев В.П., Мюллер У., Науманн В., Тертицкий Г.М., Юрина О.А. Технология изучения перемещения животных и птиц на Земле с помощью аппаратуры ICARUS на Российском сегменте МКС // Космическая техника и технологии. 2015. № 3(10). С. 38-51.
