Информационно-вычислительная система для работы доставки корреспонденции по всему миру

Бесплатный доступ
Программный комплекс (ПК) «Система поддержки принятия решений при управлении транспортировкой готовой продукции предприятия» (далее по тексту ПК СППР) представляет собой систему поддержки принятия решений при управлении транспортировкой корреспонденции. Он обладает возможностью выбирать оптимальный транспортный режим, графически представлять сформированную маршрутную карту, выбирать логистического перевозчика. Введение в эксплуатацию ПК СППР позволит сократить затраты на доставку корреспонденцию клиентам и время обслуживания клиентов. Задача повышения эффективности транспортировки позволяет снизить общие затраты предприятия, занимающегося доставкой продукции. Для решения этих задач используются системы управления транспортом, которые позволяют компаниям сократить простои транспортных средств, снизить количество необходимого для перевозки транспорта и снизить затраты, необходимые для транспортировки. Несмотря на значительные успехи в решении задач планирования транспортного процесса, по-прежнему актуальны исследования, направленные на комплексное планирование ТП, формирование рациональных маршрутов доставки грузов и организацию поддержки управленческих решений в данной области с использованием СППР.
Информационная система, информационно-вычислительная система, формирование рациональных маршрутов
Короткий адрес: https://sciup.org/140294611
IDR: 140294611 | DOI: 10.46566/2500-4050_2022_70_289
Information and computing system for correspondence delivery all over the world
The software package (PC) "Decision support system for managing the transportation of finished products of the enterprise" (hereinafter referred to as PC DSS) is a decision support system for managing the transportation of correspondence. It has the ability to choose the optimal transport mode, graphically represent the generated route map, choose a logistics carrier. The commissioning of the PC DSS will reduce the cost of delivering correspondence to customers and customer service time. The task of increasing the efficiency of transportation allows you to reduce the total costs of the enterprise engaged in the delivery of products. To solve these problems, transport management systems are used, which allow companies to reduce vehicle downtime, reduce the amount of transport required for transportation and reduce the costs required for transportation. Despite significant progress in solving the problems of planning the transport process, research is still relevant aimed at integrated planning of TP, the formation of rational routes for cargo delivery and the organization of support for management decisions in this area using DSS.
Текст научной статьи Информационно-вычислительная система для работы доставки корреспонденции по всему миру
В ходе статьи будет рассмотрено математическое обеспечение для выбора логистических перевозчиков (ЛП) для доставки готовой продукции (ГП), построен алгоритм, который лег в основу информационновычислительной системы «Система поддержки принятия решений при управлении транспортировкой готовой продукции предприятия».
Приведем математическую модель рассматриваемой задачи выбора ЛП.
Введем следующие обозначения:
— р - количество логистических перевозок ГП;
— K - количество критериев оценки перевозчиков,
— Zp — количественные или качественные значения по каждому критерию.
Для критериев, входящих в потребительскую оценку i -ого ЛП CEi(Zp,^, Zp0), где i = 1,...,P, введем обозначения для следующих множества:
— Zp = (Z p ,^, Z p } - стоимость услуги - перевозки;
— Zp = (Z2,..., Zp} - надежность соблюдения графика доставки груза;
-
— Zp = (Z 3 ,_, Z p } - врем оформления перевозки;
-
— Zp = (Z 4 ,_, Z p } - скорость доставки;
-
— Zp = (Z 5 ,_, Z p } - степень ответственности за груз;
-
— Zp = (Z 6 ,_, Z p } - отслеживание отправок;
-
— Zp = (Z 7 ,_, Z p } - частота отправок;
-
— Zp = (Z 8 ,_, Z p } - “рейтинг” предприятия;
-
— Zp = (Z 9 ,_, Z p } - готовность схем маршрутизации перевозок;
— Zp0 = (Z p0 ,^, Z p0 } - “коммуникабельность” предприятия.
Требуется выбрать перевозчика с наибольшей потребительской оценкой (1):
CEi(Zl ,„,Zp° ^ max).
Для получения сформированного решения в задаче планирования ТП необходимо решить три подзадачи, применяя следующие алгоритмы: Ch_transport, OPT_Route, Ch_carrier.
Алгоритм Ch transport используется для подзадачи Выбора TP, а именно выбор способа транспортировки и вида транспорта в системе планирования ТП при перевозках реагентов.
Входными данными для алгоритма Chjransport являются N s = {N 1 ,…, N s } - способы транспортировки; V ^ = {V ^ ,..., V^T } - значение показателей для сравнения видов транспорта, где t = 1,…,T, l = 1,.., L.
Выходными данными является вид ТР, удовлетворяющий требуемым критериям: количество видов транспорта; единый оператор перевозки; оплата перевозки; схема взаимодействия участников ТП; количество договоров; ответственность за груз (обеспечение безопасности груза); количество ответственных лиц; время доставки; стоимость перевозки; надежность соблюдения графика доставки груза; частота отправлений; способность доставить груз в любую точку; возможность выбора логистического партнера; время оформления заявки на транспортировку.
Алгоритм OPT_Route используется для подзадачи формирования рациональных маршрутов, который базируется на процедурах локального поиска с чередующимися окрестностями [1].
Входные данные: интерактивная карта автомобильных дорог ; БД: внутренние данные (списочный парк TC V` = {1,…,k} с различной грузподъемностью Qv = {Q1,…,Qk}в каждом депо; матрица фиксируемой стоимости использования ТС cfv; набор (пунктов) клиентов E = {ei,...,^ } (спрос на ГП 1клиента qil, предпочтительное время обслуживания [ai,bi], сервисное время обслуживания клиентов s’);
информация о депо D ={d 1 ,...,dNprod} (вместимость депо R d , предпочительное время возвращения в депо maxTVv, время отправления Т^ TC v из депо); допустимый уровень риска ДТП на маршрутах R max , возможный уровень качества дорог W ij («возможный класс дорог на участках маршрута»); допустимая оплата за платные дороги на маршруте Сpmax; штрафная стоимость при нарушении времени обслуживания клиентов p i ; штрафная стоимость при нарушении времени обслуживания клиентов pi;штрафная стоимость pv для нарушения возвращения времени в депо); C6lst - стоимость пройденной единицы расстояния для любого TCv; стоимость С ^ пройденной единицы расстояния для любого TCv; стоимость C t пройденной единицы времени для ТС v; внешние данные (координаты клиентов на карте; координаты депо на карте; матрицы расстояний между пунктами; время в пути между пунктами f t ; матрица платы на участках дорог сp ij , матрица типов дорог на участках w ij , матрица КА ДТП на участках дорог pi j , ущерб dv от ДТП на участках дорог).
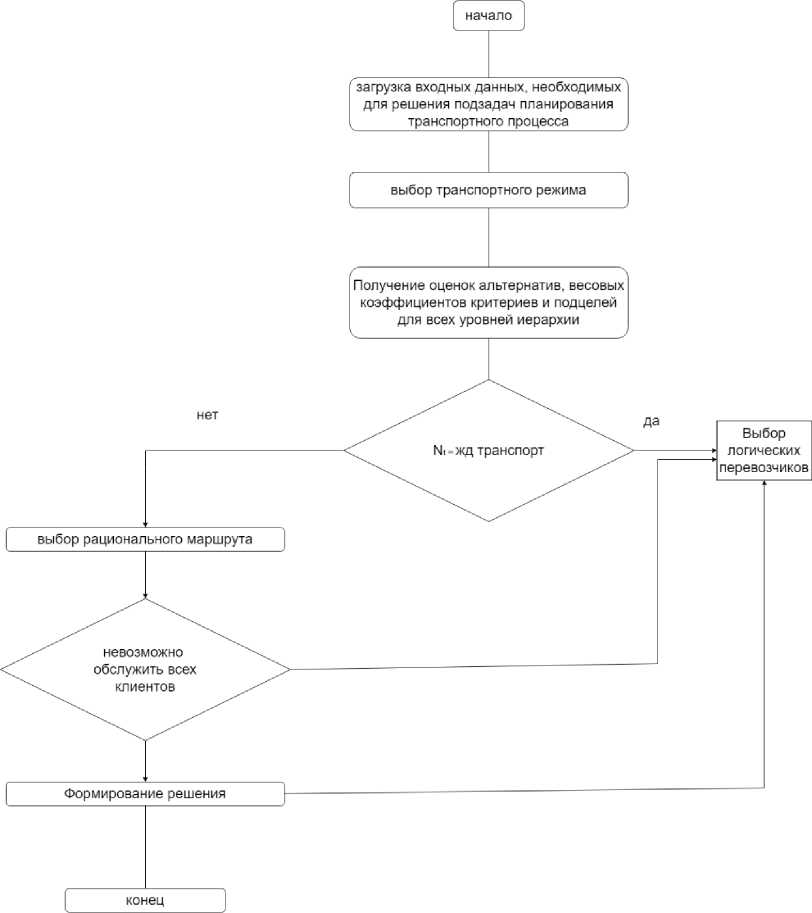
Рисунок 1 – Общая схема планирования транспортного процесса перевозки ГП
Выходными данными является набор rcost = {r 1 ,…,r i ,…,r l } рациональных маршрутов транспортировки готовой продукции автомобильным транспортом
Метод Chcarrier используется для подзадачи Выбора ЛП, который базируется на методе замещений и предпочтений Кини - Райфа [30,43].
Входные данные: Р - количество перевозчиков; К — количество критериев оценки перевозчиков; Zp - значения по каждому критерию к для каждого ЛП р, где к = 1,...,К, р = 1,...,Р.
Выходные данные: ЛП, удовлетворяющий требуемым критериям. В основу метода выбора транспортного режима (Ch_transport) положен метод Саати (рисунок 2). Метод обеспечивает выбор способа транспортировки и вида транспорта. При этом выбор должен удовлетворять критерию наилучшей интегральной оценки.
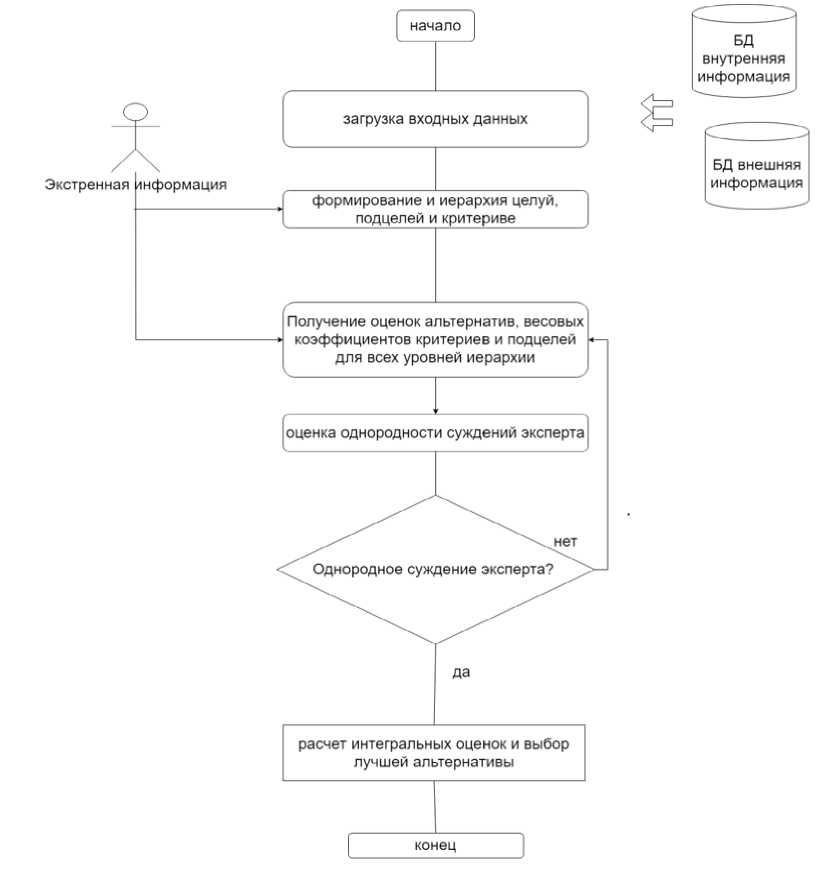
Рисунок 2 – Общая схема метода иерархии Саати
Вход :N s ={N t ….N s }; V s f = [V^….VQ, где 5 = 1….5, / = 1,..,F;
Nt = [Nx NT};Vtl = [Vl VkT], где t = 1 TJ = 1,..,1
Выход: вид транспортного режима.
Шаг 1. Формирование иерархии целей, подцелей и критериев.
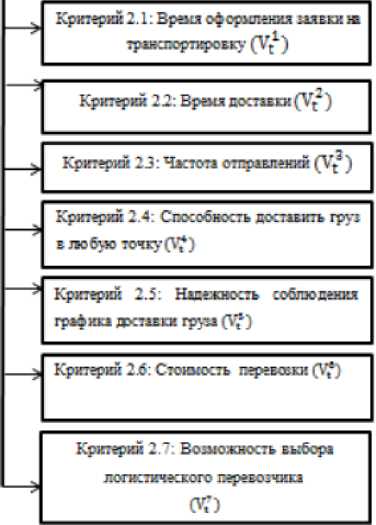
Построим иерархию выбора ТР (рисунок 3).
Цепь. Выбор транспортного режима
Подцель!: Выбор способа транспортировки
Критерий 1.1: Количество видов транспорта 1)
Критерий 1J: Количество операторов перевозки (Чу )
Критерий 13: Оплата перевозки Л/f)
Критерий 1.4: Схема взаимодействия участников ТП |VS4)
Критерий 15 Количество договоров (V,5)
Критерий 1.6: Ответственность за груз 1VS6)
Подпеть 2: Выбор вида транспорта
Критерий 1.7: Количество ответственных ™i(V,7)
Рисунок 3 - Иерархия выбора транспортного режима
Шаг 2. Получение оценок альтернатив (ТР), весовых коэффициентов критериев и подцелей для всех уровней иерархии.
Для формализации знаний эксперта по поводу сравнительной важности расположенных на одном уровне элементов иерархии относительно вышележащего элемента иерархии используется 5 - балльная шкала (таблица 1), в отличие от 9-балльной шкалы Саати [2] в предложенной шкале нет промежуточных оценочных значений [2, 3].
Таблица 1 – Шкала для парного сравнения подцелей, критериев и альтернатив ТР
|
Степень значимос |
Определение |
Объяснение |
|
1 |
Одинаковая значимость |
Две подцели, два критерия или две альтернативы вносят одинаковый вклад в достижение цели |
|
3 |
Некоторое преобладание значимости одного действия над другим (слабая значимость) |
Существуют соображения в пользу предпочтения одной из подцели, одного критерия, одной альтернативы однако эти соображения недостаточно убедительны |
|
5 |
Существенная или сильная значимость |
Имеются надежные данные или логические суждения для того, чтобы показать предпочтительность одной из подцели, одного критерия, одной альтернативы |
|
7 |
Очевидная или очень сильная значимость |
Убедительное свидетельство в пользу одной из подцели, одного критерия, одной альтернативы перед другой подцелью, критерием, альтернативы |
|
9 |
Абсолютная значимость |
Свидетельства в пользу предпочтения одной подцели, критерия, альтернативы другой подцели, другому критерию, другой альтернативы в высшей степени убедительны |
Таблица 2 – Сравнение экспертом альтернатив по критерию 1.1
|
№ альтернативы |
А1 |
A2 |
A3 |
A4 |
A5 |
A6 |
|
А1 |
1 |
k 1 /k 2 |
k 1 /k 3 |
k 1 /k 4 |
k 1 /k 5 |
k 1 /k 6 |
|
А2 |
k 2 /k 1 |
1 |
k2/k3 |
k 2 /k 4 |
k2/k5 |
k 2 /k 6 |
|
A3 |
k 3 /k 1 |
k3/k2 |
1 |
k 3 /k 4 |
k 3 /k 5 |
k 3 /k 6 |
|
А4 |
k 4 /k 1 |
k 4 /k 2 |
k 4 /k 3 |
1 |
k 4 /k 5 |
k 4 /k 6 |
|
А5 |
k 5 /k 1 |
k 5 /k 1 |
k 5 /k 3 |
k 5 /k 4 |
1 |
k 5 /k 6 |
|
А6 |
k 6 /k 1 |
k 6 /k 1 |
k 6 /k 3 |
k 6 /k 4 |
k 6 /k 5 |
1 |
Где отношение k i /k j - выражает мнение эксперта о том, во сколько раз альтернатива / лучше (хуже) альтернативы j.
Аналогичным способом необходимо сравнить альтернативы по всем критериям (критерии 1.2-1.7 и критерии 2.1-2.7). После получения всех сравнительных таблиц, необходимо рассчитать конкретные оценки альтернатив по каждому критерию, применяя для этого подсчет строчных сумм матрицы парных сравнений и нормирование полученных значений (таблица 3). Сумма весовых коэффициентов одного уровня иерархии равна 1.
Таблица 3 – Вычисления весовых коэффициентов для каждой альтернативы по критерию 1.1
|
№ П ТТТ ГТ.ГЬ^ТТП^ТГК.Т Т--- |
А1 |
А2 |
A3 |
А4 |
А5 |
А6 |
трочная сумма |
Нормированное значение критерия |
|
А1 |
1 |
k 1 /k 2 |
k 1 /k 3 |
k 1 /k 4 |
k 1 /k 5 |
k 1 /k 6 |
6 в1^ Ki j = 1 j |
В 1 /В sum |
|
At |
B q ^EK j=1 j |
В t /В sum |
||||||
|
А6 |
k 6 /k 1 |
k 6 /k 2 |
k 6 /k 3 |
k 6 /k 4 |
k 6 /k 5 |
1 |
B 6 ]EK 6 j=1 j |
В 6 /В sum |
|
Сумма1 |
Bsum = E n =1 B n |
|||||||
Для получения весовых коэффициентов альтернатив по критерию 1.1 при оценивании несколькими экспертами в качестве весового коэффициента для элемента иерархии рассматривается среднее геометрическое весовых коэффициентов Bi, полученных по матрицам парных сравнений каждого из
^11 О О экспертов В[ = В1 „В. „.В^, где Q - количество экспертов.
Получение сравнительных оценок, весовых коэффициентов критериев и подцелей происходит аналогично получению оценок альтернатив ТР (таблицы 3.2, 3.3).
Шаг 3 . Оценка однородности суждений эксперта.
Для оценки однородности суждений эксперта необходимо использовать отклонение величины максимального собственного значения Лтах от порядка матрицы п.
Однородность суждений оценивается индексом однородности ИО [или отношением однородности ОО: ИО = (X max — п)/(п — 1), ОО = ИО/М(ИО), где М(ИО) - среднее значение (математическое ожидание) индекса однородности случайным образом составленной матрицы парных сравнений, которое основано на экспериментальных данных.
В качестве допустимого значения используется значение ОО не более 0,1. Если для матрицы парных сравнений отношение однородности ОО больше 0,1, то это свидетельствует о существенном нарушении логичности суждений эксперта. Поэтому эксперту предлагается пересмотреть данные, использованные для построения матрицы. Оценка однородности производится для всех матриц парных сравнений.
Шаг 4 . Расчет интегральных оценок для альтернатив.
Основная идея данного метода заключается в следующем: вначале в процессе кластеризации все клиенты с учетом дистанции между депо и клиентами относятся к определенному кластеру; в каждом кластере с использованием процедур локального поиска с чередующимися окрестностями находится набор рациональных маршрутов, учитывающий условия и ограничения; последним этапом методики является нахождение показателей (расход бензина, пробег ТС) для найденных маршрутов (рисунок 4).

Рисунок 4 – Схема решения задачи формирования рациональных маршрутов в системе планирования транспортного режима при перевозках готовой продукции
Формирование рациональных маршрутов базируется на классических алгоритмах: алгоритм Кларка и Райта (Clarke and Wright Algorithm) и алгоритм локального поиска с чередующимися окрестностями (Variable Neighborhood Search). Классические схемы алгоритма Кларка и Райта и алгоритма локального поиска с чередующимися окрестностями для решения задач маршрутизации транспорта представлены в приложении Е и Ж соответственно. В связи с особенностями содержательной поставки задачи формирования рациональных маршрутов в работе данные алгоритмы были модифицированы.
Рассмотрим алгоритм ОРТ Route для выбора рациональных маршрутов в системе управления транспортным процессом при перевозке ГП.
Схема алгоритма ОРТ Route
Входные данные: Е = {e i ...,eNcust }, D = {d i ,..,% rod }, A = {Ab..., AN as },
V = {1,.., k], Q v = {Q t ,^,Q k }, q il , [a i , b i ], St v , R d , maxTV v , Rmax, Wy,
Cpmax, p i , pv, c ^ , t . , cp ij W ijt P ij , dv,cf v c dist , c^. , T^,
Выходные данные: rcost = {r1,…, ri,.., r1}.
Процедуры Кластеризации выглядит следующим образом:
Шаг 1 . Формирование списка всех клиентов CL и списка всех депо Dep.
Шаг 2 . Разделение списка Dep на N prod кластеров, где N prod -количество депо.
Шаг 3 . Формирование кластера К i выбираем клиента і из списка всех клиентов CL.
Шаг 4 . Ранжирование списка депо d по расстоянию от выбранного клиента і.
Шаг 5 . Выбор депо d, минимально отдаленного от клиента і.
Шаг 6 . Добавление клиента і в кластер K t .
Шаг 7 . Переход к следующему клиенту.
Шаг 8 . Выполнение шагов 3-7, пока список клиентов CL не будет равен «0».
Пошаговое описание Процедуры Rat Route представлено ниже.
Шаг 1 . Формирование ограничений для проверки допустимых найденных маршрутов из возможных ограничений, указанных в разделе 3.1, главы 3.
Шаг 2 . Формирование первоначального допустимого набора маршрутов для каждого кластера, с использованием модифицированного алгоритма Кларка и Райта.
Шаг 2.1. Построение матрицы выигрышей для всех клиентов, аналогично шагу 1 стандартного алгоритма Кларка и Райта.
Шаг 2.2. Нахождение максимального выигрыша в матрице выигрышей.
На матрице выигрышей находим ячейку (i*, j*) с максимальным выигрышем Smax (2):
^ тах = maxfj s(i,j) = s(i * ,j * ),
При этом должны соблюдаться следующие три условия:
-
— пункты i* j* не входят в состав одного и того же маршрута;
-
— пункты i* и j* являются начальным и/или конечным пунктом
тех маршрутов, в состав которых они входят;
-
— 6ij - логическая переменная - статус ячейки (i * ,j*), которая может
принимать следующие значения: 5 ф = 1, если ячейка (i * j*) посещена на предыдущих шагах, и 6 ij = О, если ячейка не была посещена ни разу. При этом считается, что ячейка (i*,j*) не заблокирована. Ячейка (i*,j*) является заблокированной, если спрос клиента і полностью удовлетворен qi j ' = 0, который вычисляется следующим образом q il ' = q il - i V ,
Где q ii - спрос на ГП I клиента i;
-
y iv - спрос i - ого клиента, удовлетворенного ТС v;
-
q il ' -обновленный спрос на ГП l клиента i.
Если удалось найти такую ячейку, которая удовлетворяет указанным условиям, то переход к шагу 2.3, иначе переход к шагу 2.16.
Шаг 2.3. Проверка грузоподъемности ТС (3.19)
^eeEqeiY = - R d X deo Х Ц < 0, где I = 1,™, L. (3.19)
Шаг 2.4. Сумма спроса q el клиентов на ГП I не может превышать вместимость R d обслуживающего депо d для ГП I (3.20):
Х И=1 ХЕ е ЕЧЕ 1 Ует - R d S den X S < о, где I = 1,-, L. (3.20)
Шаг 2.5. Вычисление времени прибытия в пункты потребления и отбытия из пунктов потребления.
Шаг 2.6. Назначение штрафной величины р., если временное окно [а е ,Ь е ] обслуживания клиента є было нарушено (3 – 4):
Да" > (a, - T") x У"
ДЬ" > (T"" - Ь,) x У"(4)
Шаг 2.7. Назначение штрафной величины pv, если время возвращения ТСv в депо d было нарушено (5)
ДТ^Г - maxTVv) x X^TVV > TVV - maxTVv) x Xva.(5)
Шаг 2.8. Выбранные маршруты могут включать в себя дороги типов
-
А, Р, М: wt j * Xj-j < wt j для всех v = 1,..,k; i,j е V, wt j e{N,K,A,P,M} ^ wt j е (1,2,3,4,5), W jj = 3.
Шаг 2.9. Плата за используемые дороги на выбранном маршруте не должна быть выше, чем максимально допустимая оплата за платные дороги (6)
Z iey Z iey ср^х % < Cp max , rgev= 1,_,k. (6)
Шаг 2.10. Риск ДТП маршруте должен быть не больше допустимого уровня риска (7)
R v = Z iev Z iev P iy * X^V = 1,..,k; ZievZievPij * X ^ < Rmax . (7)
Шаг 2.11. Объединение маршрутов.
Производим объединение маршрутов 1 и 2 в один общий маршрут. Будем считать, что пункт і * является конечным пунктом маршрута 1, а пункт j* - начальным пунктом маршрута 2. При объединении маршрутов 1 и 2 соблюдаем следующие условия:
-
— последовательность расположения пунктов на маршруте 1 от начала и до пункта і* не меняется;
-
— пункт і* связывается с пунктом j*;
-
— последовательность расположения пунктов на маршруте 2 от пункта j* и до конца не меняется;
-
— общий маршрут удовлетворяет ограничению на вместимость.
Если вышеуказанные условия выполняются, то переход к шагу 2.12, если нет-к шагу 2.13.
Шаг 2.12. Повторение шагов 2.1-2.11.
Повторяем шаги 2.1 - 2.11 до тех пор, пока при очередном повторении не удастся найти Smax который удовлетворяет условиям из шага 2.2.
Шаг 2.13. Вычисление ущерба компании от ДТП на выбранном маршруте определяется следующим образом Dv = dvRv.
Шаг 2.14. Вычисление пройденного расстояния вычисляется согласно формулам (2.6) - (2.9)
Шаг 2.17. Расчёт целевой функции.
Шаг 3 . Поиск рационального маршрута с помощью процедур локального поиска с чередующимися окрестностями.
Введем дополнительные параметры: количество итераций k в кластере, время итерации t max , окрестности Nk,k = к 1 , .^,ктах различных структур с : = i, i = 1,2,3,4,5.
Выходным параметром будет набор маршрутов rcost =
-
{7 1 , ^ ,7 ^ , ^ ,7 1 } со значением целевой функции L.
Шаг 3.1. Использование полученного решения на предыдущем шаге - набора маршрутов rcost = {7 1 , ..., rit ..., 7 1 } со значением целевой функции L.
Шаг 3.2 . Выбор случайным образом тип структуры окрестностей с : = і, і = 1, 2, 3,4, 5 для построения окрестности решений:
-
с: = 1 (Demand move);
-
с : = 2 (Swap Move);
-
с : = 3 (Shift Move);
-
с : = 4 (Swap);
-
с : = 5 (opt2).
-
3.2.1 положить k :=1;
-
3.3.2 повторять до момента, пока k < k max .
Стратегии построения представленных типов окрестностей решения для нахождения маршрута минимальной стоимости отражены в приложении И.
Шаг 3.3. Применение процедур локального поиска для поиска допустимых маршрутов rcost = {7 1 , .„, 7t, .„, 7 1 }.
Выбрать случайным образом из окрестности Nk решение r' Е Nk(r). Применить методы локального поиска от начального решения r`, найти решение r``, полученный локальный оптимум обозначить r``. Если L(r``) < L(r`) , то полагается r:= r``, при k:= 1, иначе k := k + 1.
Шаг 3.4. Проверка «новых», улучшающих первоначальное решение, маршрутов rcost = {7 1 , ^ ,7 [ , ^ ,7 1 } из окрестностей, на нарушение выбранный ограничений в 3.1.
Шаг 3.5. Выбор лучшего решения, используя критерий – Best Improvement.
После нахождения набора маршрутов необходимо рассчитать следующие показатели с помощью Процедуры Activities Route:
-
— расходная стоимость потраченного топлива;
-
— амортизационные затраты;
-
— расходы на резину;
-
— расходы на материалы, запасные части и техобслуживание;
-
— дополнительная плата за маршрут водителей;
-
— накладные расходы;
-
— пробег ТС;
-
— время отправления и время прибытия.
Пошаговое описание Процедуры Activities Route представлено ниже. Шаг 1. Вычисление расходной стоимости потраченного топлива (8):
Cost Fue i r = Fuelr. x Cost Fuel , (8)
где CostFuel - цена 1 литра дизельного топлива
Fuel ri . - расход топлива в литрах
Шаг 2. Вычисление фиксированной стоимости использования ТС cfv , которая включает в себя амортизационные затраты, расходы на резину, расходы на материалы, запасные части и техобслуживание.
Шаг 3. Дополнительная плата водителей Costadd вычисляется по формуле 9:
Список литературы Информационно-вычислительная система для работы доставки корреспонденции по всему миру
- Кочетов, Ю. Локальный поиск с чередующимися окрестностями/ Ю. Кочетов, Н. Младенович, П. Хансен// Дискретный анализ и исследование операций. Серия 2. - 2003. - Т. 10, № 1. - С.11 - 43.
- Саати, Т. Л. Принятие решений. Метод анализа иерархий/Т.Л. Саати. - М.: Радио и связь, 1989. - 316 с.
- Николаева, М. А. Методы и алгоритмы принятия решений в примерах и задачах: учебное пособие/ М.А. Николаева, О.Ф. Зотова. - Уфа.2010. - 110 с.
