Информационное обеспечение полёта разгонных блоков при выведении космических аппаратов дальнего космоса с использованием спутникового контура передачи данных

Автор: Махалов Д.А., Усиков С.Б.
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Системный анализ, управление и обработка информации, статистика (технические науки)
Статья в выпуске: 3 (50), 2025 года.
Бесплатный доступ
В статье рассматривается реализация информационно-телеметрического обеспечения полёта разгонных блоков при выведении космических аппаратов дальнего космоса. Ключевой особенностью полёта разгонного блока является передача телеметрической информации на низкой скорости через многофункциональную космическую систему ретрансляции «Луч» при помощи низкоскоростной абонентской аппаратуры ретрансляции. Предложен подход к обработке и отображению телеметрической информации, позволяющий по измерениям аппаратуры спутниковой навигации на активном участке полёта определять перегрузку, действующую на разгонный блок, и углы его ориентации.
Телеметрическая информация, разгонный блок, многофункциональная космическая система ретрансляции «Луч», аппаратура спутниковой навигации
Короткий адрес: https://sciup.org/143185386
IDR: 143185386 | УДК: 629.78.058.76:629.056.8
Information support for upper stage missions to launch deep space spacecraft involving the use of a satellite data transmission circuit
The paper discusses implementation of information and telemetry support for missions of upper stages when they launch spacecraft into deep space. A key feature of an upper stage mission consists in relaying low-rate telemetry data via multifunctional space repeater system Luch using low data rate user relay equipment. The paper proposes an approach to processing and presenting telemetry data, which make it possible to determine g-loads acting on the upper stage and its attitude angles from measurement of the satellite navigation equipment during powered flight.
Текст научной статьи Информационное обеспечение полёта разгонных блоков при выведении космических аппаратов дальнего космоса с использованием спутникового контура передачи данных

МАХАЛОВ Д.А.

УСИКОВ С.Б.
Разгонные блоки (РБ), запускаемые с космодрома «Восточный», оснащаются высокоскоростной или низкоскоростной абонентской аппаратурой ретрансляции (НААР), предназначенной для передачи сокращённого потока телеметрической информации (ТМИ) через многофункциональную космическую систему ретрансляции (МКСР) «Луч» вне зоны видимости российских станций слежения. В центре управления полётами (ЦУП) осуществляются приём, обработка, отображение и выдача ТМИ РБ потребителям. В статье рассматривается информационно-телеметрическое обеспечение запусков космических аппаратов (КА) дальнего космоса, выполняемое в ЦУП на основе ТМИ РБ, получаемой от НААР через МКСР «Луч». Данная работа является развитием статьи [1], посвящённой информационно-телеметрическому обеспечению запуска КА ближнего космоса на основе информации от НААР.
Схема информационных обменов
Телеметрическая информация РБ передаётся двумя путями (рис. 1): в зоне радиовидимости российских станций слежения (помечены голубым цветом) ТМИ принимается наземными измерительными пунктами; в зоне видимости спутников-ретрансляторов (СР) «Луч» (помечены зелёным) НААР РБ передаёт ТМИ через СР «Луч» в Центр управления ретрансляцией и связи [1]. Корректирующий импульс на активном участке АУ2 (большой жёлтый прямоугольник), формирующий траекторию отлёта КА, выдаётся в зоне видимости СР «Луч-5Б» и контролируется в ЦУП по ТМИ, переданной НААР. На рис. 1 время указано в секундах от контакта подъёма ракеты-носителя.
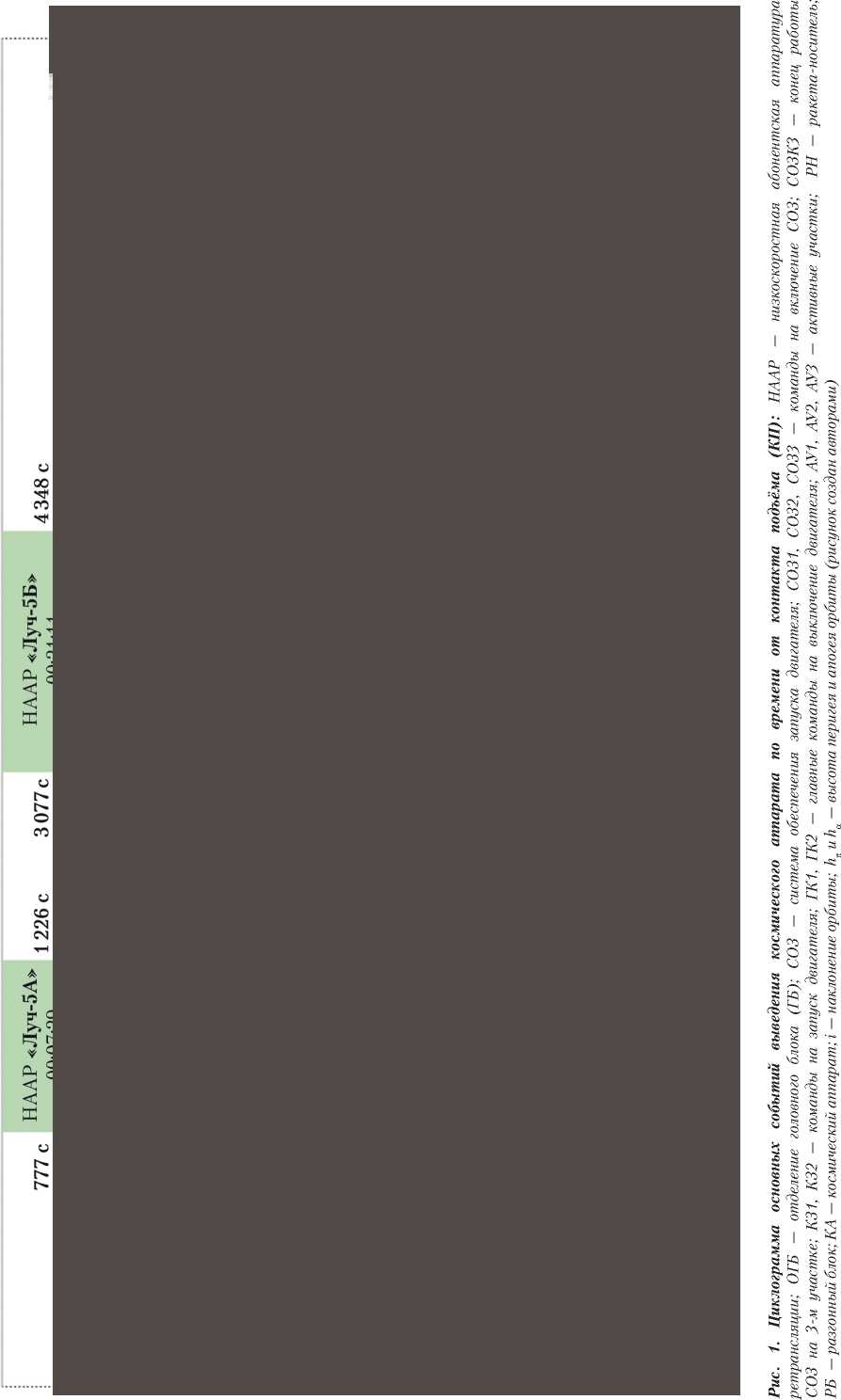
НААР, как правило, работает в режиме передачи малого кадра со скоростью 62,5 бит/с. На данной скорости один телеметрический кадр передаётся около 10 с. Кадр содержит вектор состояния РБ, несколько параметров системы управления, системы электропитания и двигательной установки, контакты отделения КА от РБ.
Целями и задачами информационнотелеметрического обеспечения запуска КА дальнего космоса, осуществляемого в ЦУП по ТМИ от НААР, являются:
-
• контроль приёма и выдачи ТМИ НААР в другие центры контроля полёта;
-
• контроль достоверности ТМИ НААР;
-
• контроль траектории полёта головного блока (ГБ), состоящего из РБ и КА;
-
• контроль запуска и останова двигательной установки;
-
• информирование руководства ЦУП, ЦНИИмаш и ГК «Роскосмос» о полёте ГБ;
-
• резервирование обработки РБ, выполняемой в других центрах контроля полёта.
Кроме того, получение оперативной и объективной информации о процессе выведения КА на требуемую траекторию необходимо для безусловного взятия этого КА на управление в ЦУП. При этом данных, передаваемых в составе ТМИ НААР, недостаточно для оперативной оценки полёта РБ, что создаёт объективные препятствия для достижения поставленных целей.
Таким образом, целью данной работы являлась разработка математического аппарата, позволяющего извлечь максимум сведений из имеющегося ограниченного состава ТМИ, и форм представления, позволяющих наиболее наглядно и ёмко отобразить полученные значения для оперативной оценки полёта РБ.
Для информационного обеспечения запуска КА дальнего космоса по ТМИ от НААР в телеметрическом информационно-вычислительном комплексе ЦУП было разработано три формата отображения ТМИ:
-
1) общая мнемосхема состояния РБ (рис. 2);
-
2) схема выведения КА на отлётную траекторию (рис. 3);
09:48:32
Время ДМВ
1035 с
Время от КП
00:03:10
До окончания зоны Луч 5-А
^
р.8 дб
62.5 бит/с
Скорость выдачи
64 слова
Размер кадра
100%
АПК ААР,
юо%
САО ЦУРС
кп ^
Лу^А
■
Луч5Б
Отделение КА А^
Реж. сохран. до конца акт. существ. РБ .
II
Активный участок 2
Контакты отделения КА
Опорная орбита Отлетная орбита
Элементы орбиты
©Время
02:28:08
1::, Мин. высота
207 км
207 км
397817 км
гй Высота
196.4 км
1". Макс, высота
190 км
189 км
343 км
И Наклонение
51.71°
Скорость
7.8 км/с
7.8 км/с
10.4 км/с
О Восходящего
345.09°
Эксцентриситет
0.00118
0.00064
0.96800
угла
Период
88.34 мин
88.32 мин
15990 мин
г Перегрузка
0.001 g
01:28:20
01:28:19
266:30:00
Двигательная установка
q Давление горючего перед “ форсунками
g Давление окислителя за стабилизатором
g Давление окислителя на входе в насос

g Давление баллона высокое
Q Давление в баке 02
g Давление гелия в * ресивере

Q Давление гелия в ШБ1
q Давление топлива в магистрали бака БЗ

Элементы конструкции
Температура шаробаллона ДУ СОЗ
Запуск маршевой двигательной установки (МДУ)
Остановка маршевой двигательной установки (МДУ)
Напряжение по шинам
Напряжение по шине ККП
^■В I
26.5 32
эяжение по шинам СУ ББ
Нет отделения
Нет отделения
Нет отделения
Нет отделения
РАСЧЁТНОЕ ВРЕМЯ
00:23:42
Запуск системы обеспечения запуска (СОЗ)
ФАКТИЧЕСКОЕ ВРЕМЯ
РАСЧЁТНОЕ ВРЕМЯ
01:23:20
ФАКТИЧЕСКОЕ ВРЕМЯ
РАСЧЁТНОЕ ВРЕМЯ
04:44:20
ФАКТИЧЕСКОЕ ВРЕМЯ
ЦЕНТР УПРАВЛЕНИЯ ПОЛЁТАМИ
Рис. 2. Общая мнемосхема состояния разгонного блока по телеметрической информации низкоскоростной абонентской аппаратуры ретрансляции (рисунок создан авторами)
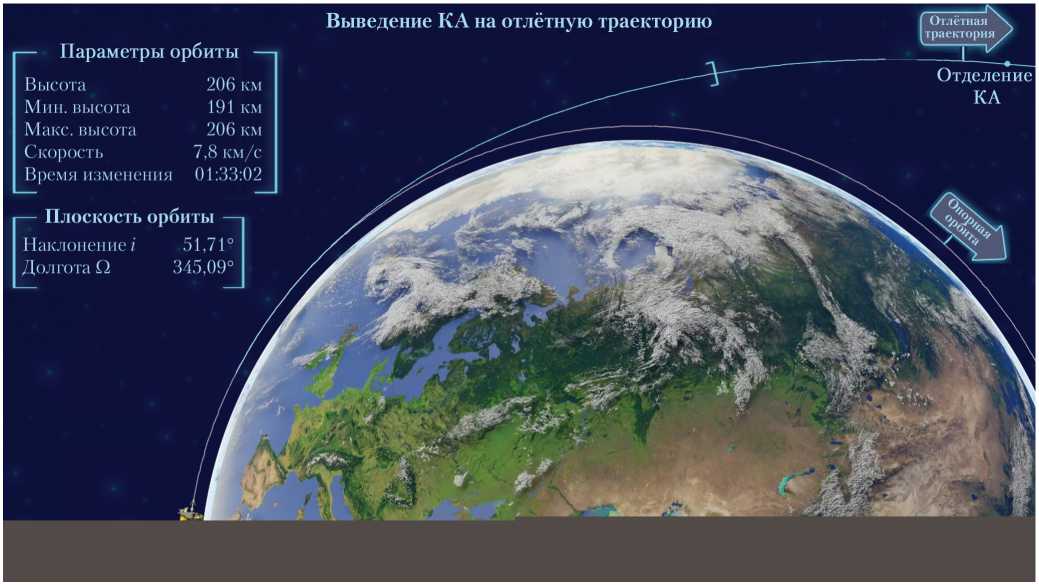
Рис. 3. Схема выведения космического аппарата (КА)
ТМИ — телеметрическая информация (рисунок создан авторами)
на отлётную траекторию в орбитальной плоскости:
-
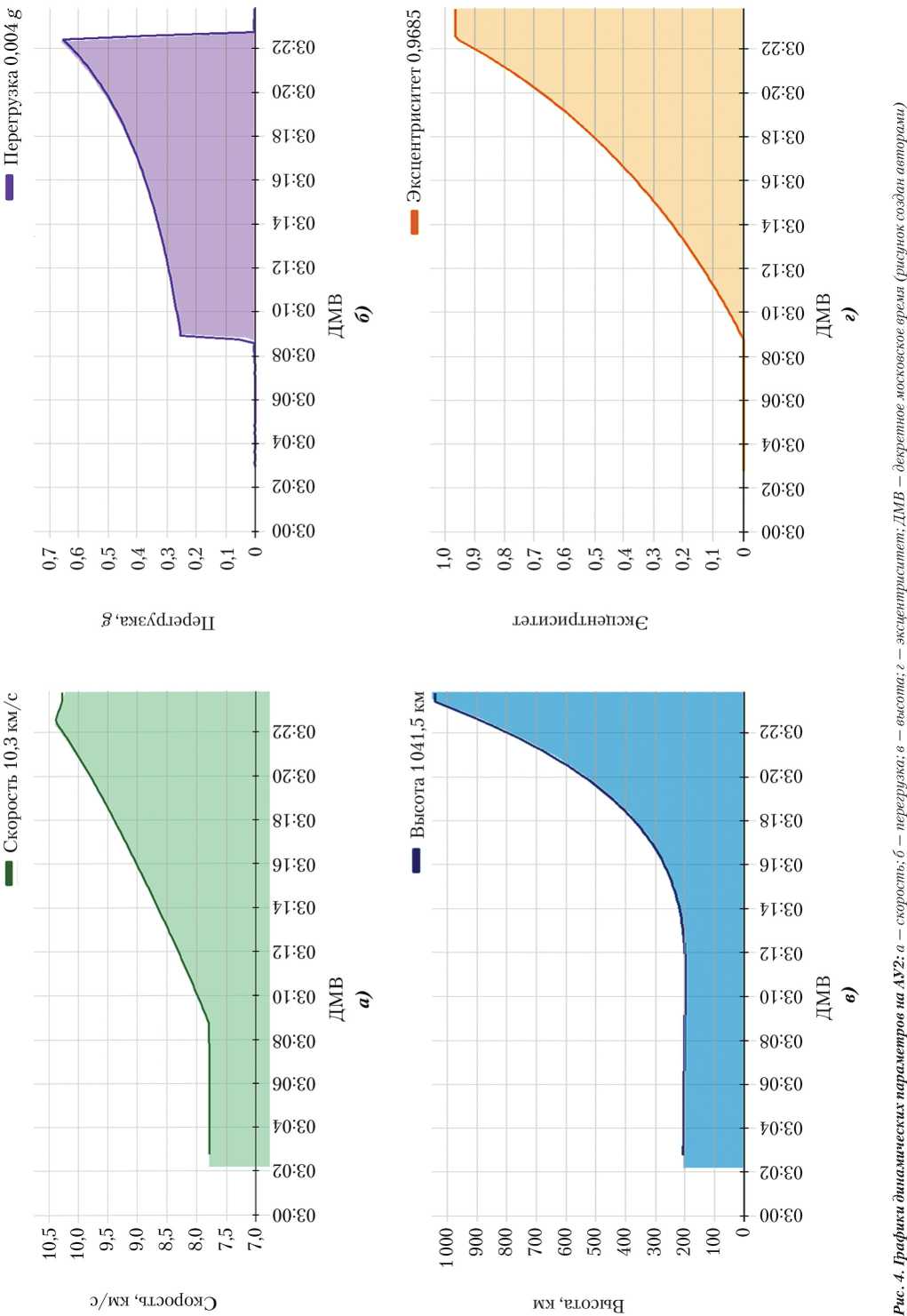
3) графики динамических параметров (рис. 4), по которым наиболее наглядно можно контролировать выполнение корректирующего импульса.
На рис. 2 приведена общая мнемосхема состояния РБ на первом сеансе связи. Верхняя область отображает общую информацию о приёме ТМИ. Слева направо: текущее декретное московское время (ДМВ), время в секундах от контакта подъёма РН, время до начала/окончания зоны видимости СР, график и текущее значение уровня принимаемого сигнала в децибеллах, скорость принимаемого сигнала, размер принимаемых кадров, качество информации, принимаемой разными приёмниками и передаваемой по двум разным трактам.
На рис. 2, во второй сверху области, между метками «КП» и «Реж. сохран. до конца акт. существ. РБ», в точном масштабе отображается временнáя диаграмма событий, где жёлтые метка и линия отмечают текущий момент времени. Синие прямоугольники с надписью «МПРС» показывают зоны видимости РБ наземными малогабаритными приёмными станциями, зелёные — спутниками-ретрансляторами. Прозрачные прямоугольники на схеме указывают на интервалы работы двигательной установки — АУ.
В правой части кадра выводятся контакты отделения КА от РБ. Если отделение проходит вне зоны видимости СР «Луч», эти контакты должны быть серыми (не сработавшими). Блок элементов орбиты (слева) содержит значения параметров, вычисляемых на основе получаемого в ТМИ вектора состояния РБ: время получения вектора состояния, текущая высота полёта над общеземным эллипсоидом, наклонение плоскости орбиты, долгота восходящего узла (Ω), текущая перегрузка, действующая на РБ. В следующем столбце выводятся максимальная и минимальная высота орбиты над поверхностью Земли, текущая скорость в гринвичской системе координат, эксцентриситет орбиты. Для удобства орбитальный период выводится как в минутах, так и в формате «чч:мм:сс». Правее для сравнения выводится два столбца с расчётными значениями орбитальных параметров до начала отлётного импульса (АУ2) и после его окончания. В процессе штатного исполнения отлётного импульса орбитальные параметры должны плавно меняться в указанных пределах. Рассмотрим особенности вычисления орбитальных параметров.
Вычислениеорбитальных параметров
Вектор состояния РБ, состоящий из радиус-вектора → r Г = ( x Г , y Г , z Г ), вектора скорости → v Г = ( vx Г , vy Г , vz Г ) и времени измерения, формируется аппаратурой спутниковой навигации (АСН) и передаётся в составе ТМИ в Геоцентрической экваториальной прямоугольной гринвичской системе координат. В процессе проведения сеансов связи в реальном времени по каждому вектору состояния выполняется вычисление орбитальных параметров движения РБ для их оперативной оценки.
rJ vJ
|
xJ |
cos S зв |
|
|
yJ |
sin S зв |
|
|
zJ |
0 |
|
|
v xJ |
= |
-® 3 sin S зв |
|
v yJ |
и, cos S З зв |
|
|
v J |
0 |
–sinS зв cosS зв
-и, cos S
З зв
-ffl 3 sin S зв
где S зв — угол текущего звёздного времени; ω З = 7,292115 · 10–5 рад/с — угловая скорость вращения Земли.
Оскулирующие элементы орбиты — это параметры, характеризующие форму и размер орбиты, её ориентацию в пространстве и положение КА на орбите в заданный момент времени. Для информационно-телеметрического обеспечения полёта вычисляются следующие элементы орбиты: T — орбитальный период; i — наклонение; e — эксцентриситет; a — большая полуось; Ω — долгота восходящего узла; ω — аргумент перигея; u — аргумент широты; v — истинная аномалия.
На рис. 5 приведена схема вычисления основных орбитальных параметров. Векторные величины здесь обозначены надстрочной стрелкой, например → c , та же векторная величина без стрелки означает модуль вектора.
На низких околокруговых орбитах на элементы орбиты оказывается существенное дополнительное влияние, вызванное полярным сжатием Земли. Элементы орбиты, вычисленные по полученным векторам состояния, будут иметь колебательный характер (рис. 6, фиолетовая линия).
Географические широта ϕ и долгота λ вычисляются по следующим формулам:
Ф = arcsin
X = arctg
f z \ z Г
|– r | Г
y Г x Г
и выводятся в градусах.
Для вычисления остальных параметров необходимо перевести вектор состояния в Геоцентрическую экваториальную инерциальную систему координат (ИСК) стандартной эпохи J2000 → rJ = ( xJ , yJ , zJ ); → vJ = ( vxJ , vyJ , vzJ ).
|
0 |
0 |
0 |
0 |
x Г |
|
|
0 |
0 |
0 |
0 |
y Г |
|
|
1 |
0 |
0 |
0 |
z Г |
|
|
0 |
cos S зв |
–sin S зв |
0 |
vx Г |
, (2) |
|
0 |
sin S зв |
cos S зв |
0 |
v y Г |
|
|
0 |
0 |
0 |
1 7 |
v z Г |
Возмущения оскулирующих элементов за счёт сжатия Земли имеют следующий вид [2–4]:
esin2 i
δ a = cos2 u ;
ц r
δΩ =–
sees i
Ц r2
u
sin2 u
2;
esin2 i
δ i = cos2 u ;
4 ц r 2
S δλ = 1
-
1 ц г2 V
S
δλ = 1
-
2 Ц r2 V
7 sin2 i
5 sin2 i
sin u + sin2 i sin3 u
cos u + sin2 i cos3 u
где ε = –1,5 C 20 μ r 0 2; λ 1 = e sinω; λ 2 = e cosω; μ — гравитационная постоянная Земли, μ = 398 600,4417 км3/с2; С 20 — старший коэффициент полиномиального уравнения модели гравитационного поля Земли; С 20 = –1,08247· 10–3.
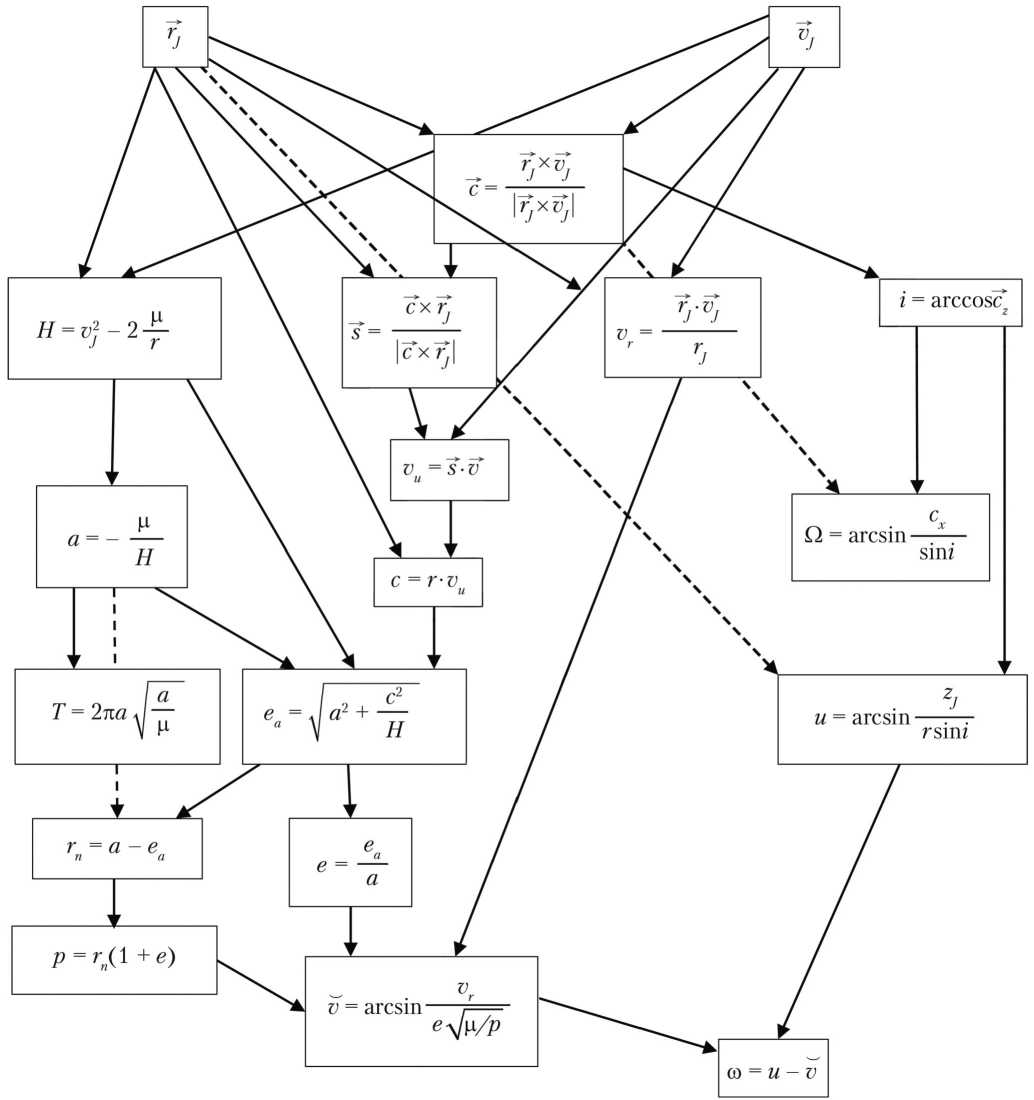
Рис. 5. Схема вычисления основных орбитальных параметров (рисунок создан авторами)
Используя соотношения (3), вычислим скорректированные оскулирующие элементы:
–a = a – δ a ;
Ω = Ω – δΩ;
i = i – δ i ;
– λ 1 = λ 1 – δλ 1 ;
– λ 2 = λ 2 – δλ 2 .
При этом
-
- = Т^+^Т;
-
T = 2п- ^ а /ц .
Скорректированные оскулирующие элементы орбиты, вычисленные для последовательных векторов состояния, будут иметь устойчивые значения (рис. 6, зелёная линия), что упрощает их оперативный контроль и сравнение с расчётными параметрами орбиты.
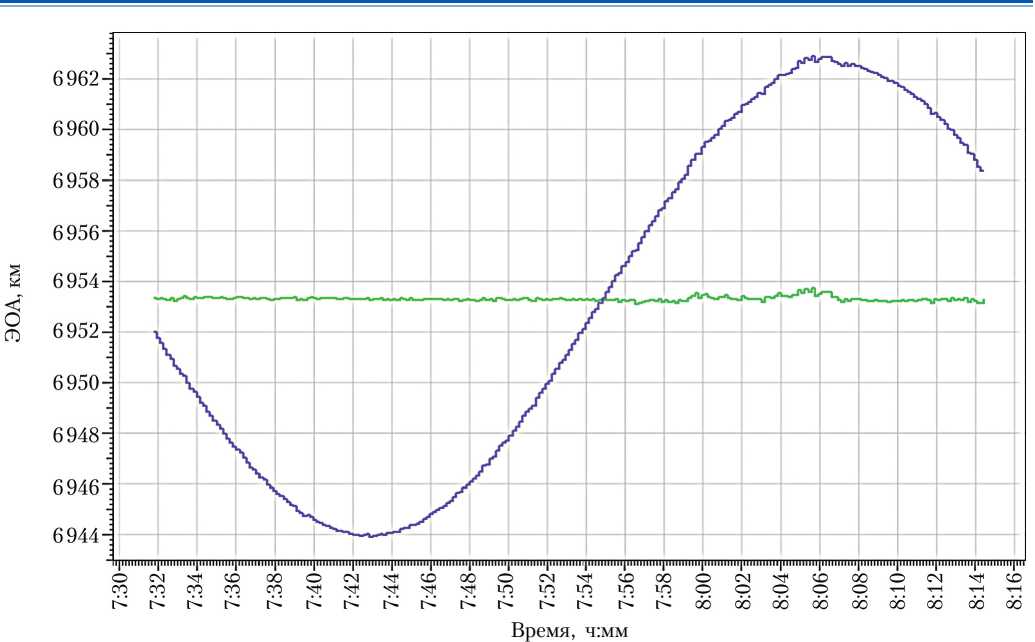
Рис. 6. Элементы орбиты «возмущённая ( ™ — ЭОА1) и невозмущённая ( ™ — ЭОА2) большая полуось», вычисленные по телеметрической информации с запуска 27.12.2018 (рисунок создан авторами)
Если в качестве модели Земли использовать эллипсоид вращения, то уравнение эллипсоида в полярных координатах можно записать в следующем виде:
ρ = r 0 (1 – αsin2ϕ),
где r 0 — радиус Земли на экваторе, r 0 = 6 378,137 км; α — коэффициент сжатия эллипсоида Земли, α = 1/298,257. Высоту полёта РБ над поверхностью земного эллипсоида определим по формуле (6):
H = rJ – ρ = rJ – r 0 (1 – αsin2ϕ) =
= rJ – r 0 1
z 2
- а ~ 4~ rJ
Минимальная H min и максимальная H max высоты орбиты вычисляются путём прогнозирования движения РБ из текущего вектора состояния на один период обращения вперёд методом Рунге–Кутты 4-го порядка с использованием модели гравитационного поля Земли 8×8 и вычисления высоты прогнозного положения РБ через небольшие равные интервалы времени.
Визуализация движения по орбите
С целью наглядного отображения движения ГБ в плоскости орбиты была разработана мнемосхема, содержащая в масштабе изображение земного шара, расчётные траектории движения ГБ по опорной и отлётной орбитам (см. рис. 3, с. 116). Плоскость орбиты определяется расчётными углами наклонения i и долготы восходящего узла Ω орбиты. В системе координат, связанной с плоскостью орбиты СК орб , существенными будут только две координаты ГБ — x орб и y орб , а третья координата z орб должна быть близка к нулю, но не равна строго нулю, так как, в силу неравномерности гравитационного поля Земли и влияния притяжения других небесных тел, движение ГБ происходит не строго в одной плоскости, но для визуального представления движения это несущественно.
Для перевода векторов состояния РБ из ИСК в плоскость орбиты СК орб используется матрица, состоящая из двух поворотов [3]:
|
0 |
cosQ |
sinQ |
0 |
cosQ |
sinQ |
0 |
|||||
|
1 |
0 |
||||||||||
|
М орб = Е 1 ( 1 ) Е э ( « ) = |
0 |
cos i |
sin i |
-sinQ |
cosQ |
0 |
= |
-cos i sinQ |
cos i cosQ |
sin i |
. (7) |
|
0 |
–sin i |
cos i |
0 |
0 |
1 |
sin i sinQ |
-sin i cosQ |
cos i |
|||
|
< |
7 |
7 |
|||||||||
По сути, матрица M орб определяет инерциальную орбитальную систему координат.
Вектор состояния РБ → rJ в ИСК переводится в орбитальную систему координат при помощи матрицы M орб следующим образом:
получится, если из зарегистрированного ускорения (изменения скорости за единицу времени) вычесть силу земного притяжения в ИСК:
→ аJ =
A Vj At
GM., →
---— r. rJ ,
→ r о = ( xо , yо , zо ) = M орб · → rJ . (8)
При этом достигается z о ≈ 0.
Полученные координаты пригодны для изображения на плоскости мнемосхемы. Масштаб, смещение центра Земли и поворот вокруг центра Земли на мнемосхеме подбираются таким образом, чтобы изображение было максимально крупным и чтобы расчётное положение РБ в моменты начала и конца сеанса связи, а также отделения КА от РБ, было в зоне видимости. Для наглядности в свободной области экрана выводятся основные параметры орбиты, а также информация о поступлении в настоящий момент времени ТМИ.
Методика вычисления перегрузки
Разработана методика вычисления по измерениям АСН перегрузки, действующей на КА. В основе мето-
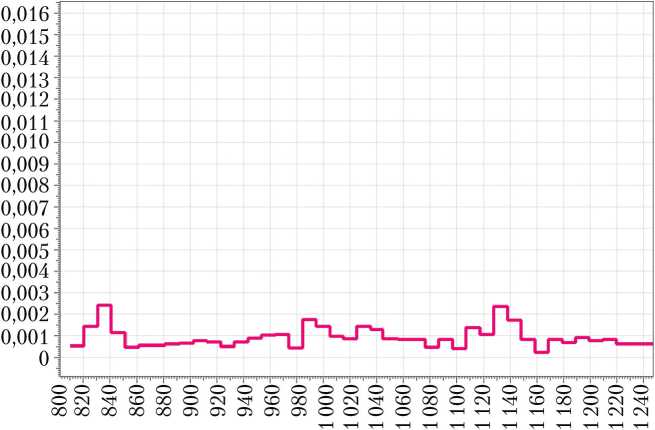
Время от контакта подъёма, с
щее искомую перегрузку, Рис. 7. Перегрузка на пассивном участке (рисунок создан авторами)
где G — гравитационная постоянная, G = 6,6740831 · 10–11 м3/(с2 · кг); M З — масса Земли, M З = 5,97219 · 1024 кг .
Следует отметить, что в реализованном алгоритме вместо второго слагаемого в формуле (2) используется сила притяжения Земли, определённая по модели гравитационного поля Земли порядка 8×8 [3], что даёт существенно более точные результаты определения микроускорений. Под перегрузкой понимается отношение ускорения, испытываемого РБ, к ускорению свободного падения на поверхности Земли g = 9,81 м/с2:
—— aJ
→ gJ
g
Результаты расчёта перегрузки по измерениям АСН на участке пассивного полёта, где перегрузка должна быть нулевой, приведены на рис. 7.
Из рис. 7 видно, что измерения АСН, установленной на РБ, позволяют проводить достаточно точную оценку перегрузки (порядка 0,002 g ). Для сравнения — штатный аппаратный датчик перегрузки РБ имеет погрешность порядка 0,1 g , т. е. в 50 раз хуже.
На втором сеансе приёма ТМИ НААР выполнялся второй АУ работы маршевой двигательной установки (МДУ) по следующей схеме: сначала несколько секунд работает система обеспечения запуска (СОЗ) двигательной установки, затем — МДУ. В задачу СОЗ входит создание небольшого ускорения, обеспечива- ющего разделение компонентов топлива и газа наддува в баках РБ. Поскольку в малых кадрах, передаваемых НААР, отсутствуют параметры бортовой системы управления и СОЗ, для регистрации включения СОЗ была разработана мето- дика, использующая вычисленную перегрузку →gJ.
Определим скоростную систему координат, связанную с вектором скорости РБ →vJ. Ось Oxc направлена вдоль вектора скорости →vJ, ось Ozc перпендикулярна плоскости орбиты, а ось Oyc дополняет тройку векторов до правой, т. е.
РБ в момент выполнения корректирующего импульса. Например, если даётся импульс на торможение, продольная перегрузка будет отрицательной. Таким образом, за момент запуска СОЗ для выполнения отлётного импульса РБ принимается момент, когда gxc > 0,0025 (величина определена опытным путём по серии предыдущих запусков РБ). Время запуска МДУ определяется более простым способом — фиксируется момент превышения давления окислителя за стабилизатором и горючего перед форсунками значения 50 кгс/см2.
Кроме того, приведённые соображения подсказывают методику вычисления ориентации РБ на основе вычисленного вектора ускорения, определённого по измерениям АСН. Поскольку вектор тяги, создаваемый МДУ, направлен строго в ту сторону, в которую развёрнут РБ, направление вектора ускорения позволяет определить ориентацию РБ.
Вектор →a в скоростной системе ко- ординат обозначим
Тогда угол тангажа проекцией вектора кости орбиты и (осью Oхc ) (рис. 9):
→ ac = ( axc , ayc , azc ). — это угол между ускорения в плос-вектором скорости
Oxc ↑↑ → vJ ;
Ozc ↑↑ → rJ × → vJ .
Переведём ускорение в скоростную систему координат:
gc = ( gxc , gyc , gzc ) = Mc · gJ , (12) где M c — матрица перехода из инерциальной в скоростную систему координат.
На рис. 8 показано, как возрастает продольная составляющая вектора перегрузки gxc в момент запуска СОЗ. Следует отметить, что направление ускорения зависит от ориентации ay θ c = arctg yc .
axc
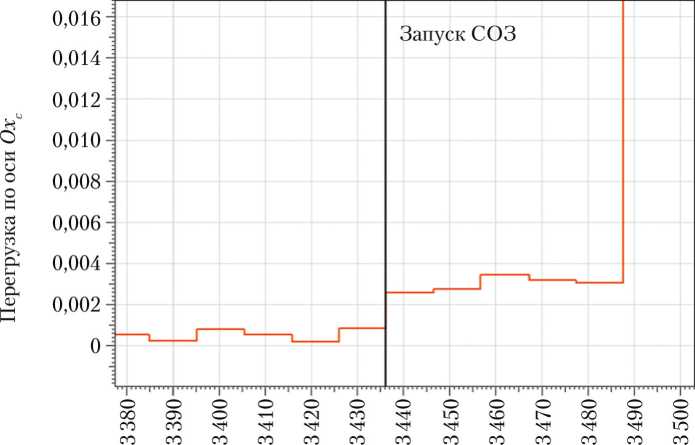
Рис.
Перегрузка при
c создан авторами)
g x
Время от контакта подъёма, с включении системы обеспечения запуска (рисунок
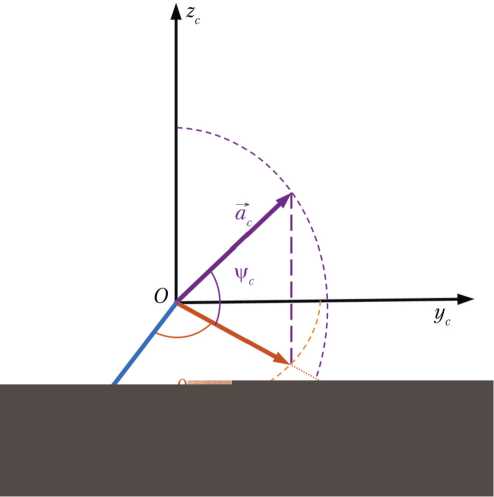
Рис. 9. Углы тангажа 6 с и рыскания V с разгонного блока в скоростной системе координат Ox c y c z c : v — скорость; а с — ускорение (рисунок создан авторами)
Система управления РБ управляет ориентацией в начально-стартовой инерциальной системе координат (НССК), связанной с азимутом запуска РБ и фиксированной на момент времени окончания точного приведения (ОТП) гиростабилизиро-ванной платформы. Требуемые углы тангажа и рыскания на время активных участков в баллистических расчётах заданы, как правило, в НССК. Для определения их фактических значений по ТМИ необходимо век-
тор ускорения → aJ перевести в НССК. Сначала поворачиваем вектор из ИСК J2000 в ИСК на момент времени ОТП:
[ а ОТП ] =
А синус угла рыскания равен отношению проекции вектора ускорения на ось Ozc и самим вектором ускорения:
V
a zc
= -arcsin —г.
| ac|
—— аНССК
cosS зв.ОТП
–sin S зв.ОТП 0
где S зв.ОТП
sin S зв.ОТП 0
cos S зв.ОТП 0
— a J ,
звёздное время на мо-
мент ОТП. Далее поворачиваем полученный вектор из ИСК в НССК [3]:
-sina s sin! s - cosa s sinф s cos! s sina s cos! s - cosa s sinф s sin! s
cos ф s cos! s
cos ф ssin! s
cosa s cosф s sinф s
—— а ОТП ,
-cosa s sin! s + sina s sinф s cos! s cosa s cos! s + sina s sinф s sin! s
здесь a s — геодезический азимут направления стрельбы; Z s — геодезическая долгота точки старта; ф s — геодезическая широта точки старта.
Тогда получаем фактические углы тангажа и рыскания в НССК:
-sina s cosф s
|
Параметр |
Заданный |
Вычисленный |
|
6нсск в начале импульса |
138,0 ° |
138,5° |
|
Скорость изменения 6 НССК |
-0,05 ° /с |
-0,05 ° /с |
|
v hcck |
0 ° |
±0,2 ° |
a y НССК
6НССК = arctg ^ ’ xНССК
v hcck
–arcsin
a z НССК
\ а
НССК
|
На одном из прошлых запусков РБ
были получены данные, очень близкие
к требуемым (таблица).
На рис. 10 приведён график 6 НССК , а на рис. 11 — график 6 c в процессе выполнения отлётного импульса.
Описанная методика была проверена на серии запусков РБ и показала высокую точность расчётов. Для коррекций орбиты, выполняемых с постоянными углами тангажа и рыскания, погрешность определения составила менее 0,5°. Например, при выведении одного из КА ДЗЗ при заданных 6 Н ссК = 113,08°; V hcck = 0° по результатам вычислений были получены значения 6 НССК = 113,03^113,17°; v hcck = 0,2...0,5°.
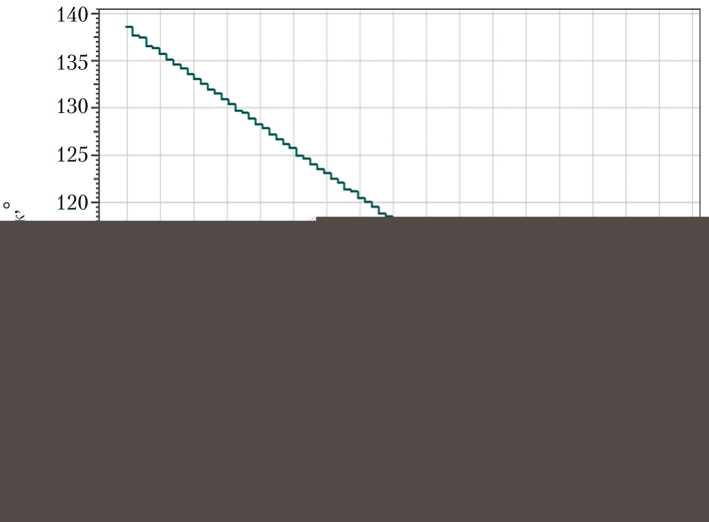
Рис. 10. График угла тангажа в начально-стартовой системе координат θ НССК (рисунок создан авторами)
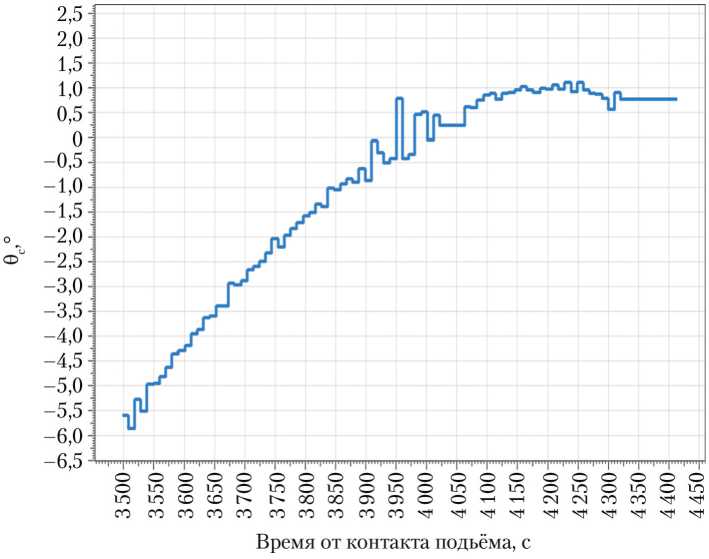
Рис. 11. График угла тангажа в скоростной системе создан авторами)
координат θ c (рисунок
Разработанная методика вычисления ускорения (перегрузки) и ориентации КА по измерениям АСН может применяться на других КА и средствах выведения, например для выявления нештатных ускорений, вызванных утечкой рабочих газов или жидкостей или в случае неисправности штатных датчиков для проведения дублирующих оценок.
Расчётные данные
Для отладки программного обеспечения, определения расчётных траекторий движения ГБ по опорной и отлётной орбитам (см. рис. 3, с. 116), а также получения расчётных значений основных орбитальных параметров (см. рис. 4, с. 117), формируется файл с модельной ТМИ, содержащий векторы состояния РБ, взятые из баллистического расчёта и переведённые в гринвичскую систему координат. Полученные значения вводятся в исходные данные на обработку и отображение ТМИ для обеспечения визуальной оценки фактических значений, получаемых в процессе полёта. На мнемосхеме выведения КА на отлётную траекторию (см. рис. 3, с. 116) обозначены расчётные траектории. В процессе сеанса в реальном времени на мнемосхеме выводится изображение РБ с КА по полученным координатам, переведённым в плоскость орбиты. В случае отсутствия включения МДУ схема показывает, что РБ продолжает движение по опорной орбите. В случае отклонения ориентации РБ от заданной, мы увидим движение РБ по траектории, отличной от расчётной.
Для вывода на третьей мнемосхеме графиков основных параметров, характеризующих выполнение корректирующего импульса, было выбрано четыре параметра:
-
• скорость РБ в ИСК | → vJ |;
-
• действующая на РБ перегрузка | → gJ |;
-
• высота полёта над поверхностью земного эллипсоида H ;
-
• эксцентриситет орбиты e .
Расчётные значения параметров выведены на графики в виде затенённых областей, а фактические рисуются яркими линиями, что обеспечивает удобную и наглядную оценку полученных значений в реальном времени.
Выводы
Для информационно-телеметрического обеспечения запуска КА дальнего космоса по ТМИ, получаемой от НААР разгонного блока в ЦУП, был разработан математический аппарат, позволяющий по измерениям АСН с высокой точностью определять ускорение, действующее на ГБ, фиксировать включение и отключение МДУ, а также определять ориентацию ГБ во время работы МДУ. Кроме того, было разработано программное обеспечение, реализующее вывод результатов обработки и автоматизированного анализа ТМИ на трёх наглядных мнемосхемах.
Первая мнемосхема отображает состояние приёма ТМИ, циклограмму основных полётных операций, значения орбитальных параметров, вычисленных по векторам состояния РБ, полученным от АСН, и значения остальных телеметрических параметров.
На второй мнемосхеме в орбитальной плоскости в строгом масштабе выводится изображение Земли, опорная и отлётная траектории ГБ, а также его фактическое положение.
На третьей мнемосхеме рисуются четыре графика значений динамических параметров, вычисляемых по вектору состояния РБ и характеризующих выполнение корректирующего импульса.
Таким образом, в работе реализовано информационно-телеметрическое обеспечение полёта РБ при выведении КА дальнего космоса на основе данных от НААР, передаваемых через МКСР «Луч».
