Интеграция инерциальной, спутниковой и астроинформации в задаче коррекции навигационной системы

Автор: Числов Кирилл Александрович
Журнал: Космические аппараты и технологии.
Рубрика: Информационные технологии
Статья в выпуске: 2 (2), 2012 года.
Бесплатный доступ
В рамках концепции задачи коррекции инерциальной навигационной системы предложены и исследованы модели комплексирования инерциальной, спутниковой и астроинформации. Приведены результаты численных экспериментов, характеризующие вычислительную устойчивость и эффективность решения задачи в условиях конечной точности измерений.
Инерциальная навигация, астросистема, ньютонометр, гироскоп, обратная задача, навигационная спутниковая система
Короткий адрес: https://sciup.org/14117279
IDR: 14117279 | УДК: 629.058
The integration of the inertial, satellite and astroinformation in the problem of the navigation system correction
Within the framework of inertial navigating system correction problem the models of inertial, satellite and astroinformation integration are offered and investigated. The results of numerical experiments characterizing computational stability and efficiency of the problem solution in conditions of the measurements limited accuracy are presented.
Текст научной статьи Интеграция инерциальной, спутниковой и астроинформации в задаче коррекции навигационной системы
Как известно [1], автономные инерциальные навигационные системы (ИНС) предназначены для определения параметров местоположения и пространственной ориентации подвижных объектов, но неустойчивость таких систем является заметным препятствием для их широкого применения. Получившие в настоящее время распространение навига-
-
1 © Числов К. А., 2012
Исследование выполнено при поддержке РФФИ-ДВО (грант № 11-01-98501-р_восток_а) и ДВО РАН (грант № 12-1-0-03-005).
ционные спутниковые системы (НСС), например, типа ГЛОНАСС, вообще говоря, способны решать те же задачи, что и ИНС, но для решения второй из них (задачи ориентации) на борту объекта необходимо создать сеть пространственно разнесённых приёмников сигналов НСС [2]. Вместе с тем требования к сети, обусловливаемые требованиями к точности и надёжности решения задачи, далеко не всегда совместимы с возможностями их удовлетворения на подвижном объекте.
Объединение (интеграция) типа ИНС-НСС обеих систем в рамках концепции задачи коррекции ИНС при одном приёмнике НСС на борту объекта в принципе позволяет, как показано в этой статье ниже, устойчиво решать обе упомянутые выше навигационные задачи. Вместе с такой интегрированной системой исследуется навигационная система более высокой степени интеграции (типа ИНС-НСС-АС), включающая в свой состав наряду с ИНС и НСС астросистему (АС), причём к последней предъявляется в определённом смысле минимальное требование – обеспечение задачи коррекции ИНС угломерной информацией при наблюдении одной звезды. Такое дополнительное комплексиро-вание навигационной информации в рассматриваемом случае, когда задача определения места объекта, по существу, может быть качественно решена НСС, направлено не только на улучшение разрешимости задачи навигации в целом, но прежде всего её части, относящейся к задаче ориентации, качественное и надёжное решение которой приобретает особое значение, если подвижный объект является носителем информационных и силовых платформ.
Основные модельные представления
Переходя к формальным описаниям, отметим, что базовая модель метода инерциальной навигации (ИНМ) представляется двумя группами дифференциальных уравнений – динамической (ДГУ) и кинематической (КГУ) [1], где первая описывает траекторию, а вторая – эволюцию системы отсчёта, в которой траектория рассматривается. Тогда идеализированная модель обратной задачи, решаемой в рамках метода, может быть записана в следующем общем виде:
Dq = p , q (0) = q o ,
Dp = G + F , p (0) = p o ,
DA = 0, A(0) = Ao, z = J(q, p, A), где векторные переменные – q (радиус-вектор места носителя), p (удельный импульс, или, что то же самое, абсолютная линейная скорость носителя), G (напряженность GE-поля), F (удельная сила негравитационной природы) - записываются в проекциях на оси вращающейся с абсолютной угловой скоростью w = (Wj, ш2, ш3)Т правой ортогональной системы отсчёта 0q = 0q 1 q2q3 с началом в центре масс Земли, осью 0q3, направленной по радиус-вектору местоположения носителя, и осями 0q 1 и 0q2, направленными соответственно на географические Восток и Север; т - символ транспонирования векторов и матриц; A = (Aj) - матрица ориентации приборной системы отсчёта относительно выбранной инерциальной, (i, j) = 1,3 ; z - вектор измерений (дополнительных к инерциальным), доставляемых от НСС и астросистемы; J(q, p, A) - 51
функция связи «состояние-измерение»;
I) = d dr + co - оператор абсолютной производной; – кососимметрическая матрица, составленная из компоне нт вектора ω так, что ^^dk/'H, ( i , k , j ) = 1,3 ; eikj - опера тор Леви-Чивиты; инерциальные измерения значений компонент векторов w и F выполняются в приборной системе отсчёта с осями, параллельными соответствующим осям системы 0 q .
Далее с учётом физических реальностей, а это – наличие погрешностей в измерениях, в определении начальных значений q 0 и p 0, а также неполнота представлений о GE-поле (то есть о векторе G ( q, r ), r = | q |), осуществим переход от уравнений (1) к линейным уравнениям в вариациях. В итоге получим
D5q = op- vq, oq(0) = 5q0,
Dop = G^Sq + g + f- vp + G; e3, 5p(0) = 5p0, g = zM, g(O) = go,
Dp = v, p(O) = po,
^i = IIHC - Фнсс = -^-Pi + £i’
Г
Os2 = (aiihc — Хнсс)СО8ф = — —-— p2 + e2’ Г
З-з = 7imc "" 7нсс = ^з + £3’
-
6 - ? — e^jl]^ j + £3 , 5 — 4, 5.
где v и f - векторы инструментальных погрешностей гироскопов и ньютонометров; φ, λ и r – соответственно геоцентрические широта, долгота и радиус места объекта-носителя, вычисляемые ИНС (ф ИНС , Х ИНС , r ИНС ) и доставляемые НСС (фНСС, Х Н СС, r НСС); е,, i = 1,3 , - вектор инструментальных погрешностей НСС-определений; в = (в i ), i = 1,3, -вектор погрешностей интегрирования КГУ;
l = ( lрl 2, 1 3)T - орт визирования звезды в проекциях на оси приборного координатного трёх-
ИССЛЕДОВАНИЯ
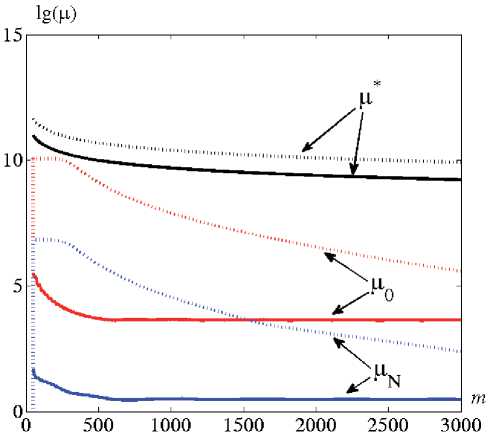
HAVKO____________ Ж ГРАДА гранника; £$. 5 = 4,5 - инструментальные погрешности визирования звезды; 8z = (Sz, ^ -вектор невязок измерений, причём κ = 3 для системы ИНС-СНС и κ = 5 для системы ИНС-НСС-АС; Sq и Sp - погрешности интегрирования ДГУ; G q = dG / dq и G r = dG / dr, в частности, при центральности GE-поля (именно для этого случая ниже будут представлены результаты вычислительного эксперимента) g:,=- Цель решения задачи (2) – это оценки 8q*, 8p*, в* векторов 8q, Sp, в и в конечном итоге оценки векторов q, p, и матрицы А, образуемые следующим образом: q* = q + ~q*, p* = ~ + 8p*, A = (E + M, где q , p и A -результаты интегрирования ДГУ и КГУ, или модельные значения, Е – единичная матрица. В модели (2) дополнительного разъяснения требуют два последних уравнения, характеризующие астроинформацию. Пусть L – орт направления на звезду в инерциальной системе отсчёта, тогда l = AL -орт этой же звезды в приборном трёхграннике. Числовым же образом l в этом трёхграннике является вектор 1 = AL = (1- /М, так что методологическая часть погрешности визирования звезды в нём есть Al = l -1 = l р. Перейдём к модели инструментальной погрешности. Обозначим через Y1 и Y2 «азимутальный» и «высотный» углы положения звезды в приборном трёхграннике, а через А1 и А2 - соответственно инструментальные погрешности измерений этих углов при наблюдении звезды. Тогда в (2) ts = gyAr gy = cl, m;, где с учётом индексации инструментальных погрешностей НСС можно было бы принять s = 4,6, j = 1,2. Вместе с тем, принимая во внимание линейную зависимость строк матрицыl , можем ограничиться значениями s = 4,5 и представить вектор невязок астроизмерений в виде Azs=Аls + £s, s = 4,5, что и отражено в модели (2). В общем случае l = l(t), в частном -при движении объекта вдоль параллели (в северном полушарии Земли), когда доступна наблюдению Полярная звезда l = (0, cos ф, sin ф)т (именно для такого случая в этой статье представлены вычислительные эксперименты). Модель (2) представляет собой систему уравнений «состояние-измерение»[3], и зада- № 2 (2) апрель-июнь 2012 ча может быть решена непосредственно, если обратиться к методу динамического обращения, реализовав его, например, с помощью алгоритма калмановского типа [4]. Наряду с этим, учитывая линейность уравнений, модель задачи весьма стандартным способом может быть приведена к системе линейных алгебраических уравнений с некоторым конечномерным оператором (матрицей) L размерности ктхn (dim L = ктхn), динамически расширяемым по m по мере накопления измерений, и n = dim(δqT, δpT, βT); в этом случае решение задачи интерпретируется в рамках представлений метода наименьших квадратов (МНК/LSM). Вычислительные эксперименты Основная цель выполненных экспериментов - верификация корректности математической постановки задачи в условиях конечной точности вычислений и измерений; достигается она при исследовании на невырожденность матрицы L (её можно отождествлять с матрицей наблюдаемости [4]) и при непосредственном построении решения с использованием алгоритма динамического обращения Калмана [3, 4]. Упоминаемая здесь матрица L имеет вид L = (НФ(г0. т, ))"=„, т - целое число, причём m > n; t = mh; h - шаг дискретизации задачи по времени t, dim L = кт хn; Н - матрица связи «состояние-измерение», так что 8z = Hx + £, dim Н = кхn; Ф(10, t) - фундаментальная матрица решения однородного дифференциального уравнения, соответствующего дифференциальному уравнению в модели (2), dim Ф(t0, t .) = n хn. На рис. 1 приводятся графики (сплошные линии – для систем типа ИНС-НСС-АС, прерывистые – для ИНС-НСС) значений сингулярных чисел обусловленности р0, рN и р*, где р0 и рN - вычисленные при относительной машинной (компьютерной) точности вычислений e 1 = 2,2А0-16 числа обусловленности соответственно исходной (L) и нормированной по столбцам (N = LD-1) матриц; D = diag(||Li|1, ||L2||,^,||LnИ), ||L.|| -евклидова норма i-го столбца матрицы L; – критическое число обусловленности [5]. Условие разрешимости задачи (2) в вычислительной среде, а именно: р* > р0 и/или p* > pN, что хорошо видно из рис. 1, выполняется для обоих типов систем. Последнее Таблица 1 В таблице представлены наибольшие абсолютные значения погрешностей оценивания соответствующих переменных (где |Ааi| = |Аq.|/r, i = 1,2) за пределами первой 1000 с. решения задачи для обоих типов систем (верхние строки – для системы ИНС-НСС-АС, нижние – для ИНС-НСС) при среднеквадратических значениях компонент погрешностей измерений ε, f, ν, соответственно равных гт, =1м, i = 1,3; <т^=1(г° рад, i = 4,5 g t = ЦГ3 м с2, i = 1,3; gVi = КГ^ град час, i = 1,3 , и при различных представлениях о модели напряженности GE-поля для случаев g = |g| = const. Как видно из результатов вычислительных экспериментов, имеет место весьма несущественное качественное различие исследованных двух типов интегрированных систем. Выполненное исследование указывает на достаточно высокую эффективность и перспективность рассмотренных типов интегрированных систем для решения задач построения информационных и силовых платформ для подвижных объектов широкого профиля назначения. Автор благодарит доктора технических наук, главного научного сотрудника, заведующего Сектором управления и навигации ИАПУ ДВО РАН профессора А. С. Девятисильного за помощь в работе над статьёй. Рис. 1. Графики значений чисел обусловленности
g = 10-5 м/с2
g = 10-4 м/с2
g = 10-3 м/с2
1 Ав,|
7,31·10-8
7,41·10-8
7,42·10-8
4,22·10-7
4,72·10-7
8,91·10-7
1 Ав21
3,71·10-7
3,80·10-7
7,25·10-7
5,25·10-7
7,62·10-7
9,36·10-7
1 Авз1
3,68·10-7
3,75·10-7
6,89·10-7
4,27·10-7
4,88·10-7
8,84·10-7
|AaJ
1,16·10-7
1,16·10-7
1,19·10-7
4,12·10-7
4,69·10-7
8,89·10-7
|Аа2
3,67·10-7
3,76·10-7
7,24·10-7
5,27·10-7
6,83·10-7
9,43·10-7
означает сходимость (по m) алгоритмов МНК и асимптотическую устойчивость (по t) алгоритмов динамического обращения калма-новского типа. Отметим, что графики рис. 1 построены для случая движения объекта по географической параллели ф = 45° в восточном направлении с относительной (к Земле) скоростью V = 100 м/с, h = 1 с; однако вывод о разрешимости задачи сохраняется и для других значений φ и V.
Список литературы Интеграция инерциальной, спутниковой и астроинформации в задаче коррекции навигационной системы
- Андреев В. Д. Теория инерциальной навигации. Корректируемые системы. - М.: Наука, 1967. - 648 с.
- Девятисильный А. С., Крыжко И. Б. Исследование модели навигационных определений с помощью спутниковой системы типа «ГЛОНАСС» // Космические исследования. - 1999. - Т. 37, № 3. - С. 261-266.
- Калман Р., Фалб П., Арбиб М. Очерки по математической теории систем. - М.: Мир, 1971. - 400 с.
- Осипов Ю. С., Кряжимский А. В. Задачи динамического обращения // Вестник РАН. - 2006. - Т. 76, № 7. - С. 615-624.
- Девятисильный А. С., Крыжко И. Б. Исследование обусловленности задачи численного определения квазистационарной орбиты ИСЗ по наземным наблюдениям // Космические исследования. - 1997. - Т. 35, № 1. - С. 99-101.
