Интегрированный электромеханический комплекс

Автор: Прошина Р.Д.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Общие проблемы машиностроения
Статья в выпуске: 1-3 т.13, 2011 года.
Бесплатный доступ
Рассматривается интегрированный электромеханический комплекс, обеспечивающий проведение научных исследований при проектировании технических объектов машиностроения. Сочетает в себе методы и методики автоматизированного исследования управляемых вентильно- электромеханических систем на математических и физических моделях.
Автоматизация исследований, электромеханический комплекс, модель, управление
Короткий адрес: https://sciup.org/148199686
IDR: 148199686 | УДК: 62.83:621.314
Integrated electromechanical complex
Integrated electromechanical complex providing carrying out the scientific researches at designing of technical objects in machine building is considered. Combines methods and techniques of the automated research the operated valve-electromechanical systems on mathematical and physical models.
Текст научной статьи Интегрированный электромеханический комплекс
Структура интегрированного электромеханического комплекса (ИЭМК), представляющего собой многофункциональный объект исследований (МФО), основывается на концепции интегрированных комплексов сетевых автоматизированных лабораторий [1] (рис. 1).
Рис. 1. Структура интегрированного электромеханического комплекса
ИЭМК объединяет совокупность технических, математических, программных и методических средств, обеспечивающих научные исследования объектов машиностроения. Базовые компоненты ИЭМК – модели: математические (ММ) и физические. Физические модели включают в себя установки с машинами постоянного тока (МПТ), асинхронными (АМ) и синхронными (СМ) машинами. Математические модели электромеханических систем строятся на базе теории обобщённого электромеханического преобразователя (ЭМП) в двухфазных системах координат: u, v, α, β, d, q, x, y. Математическое моделирование и экспериментальные исследования вентильных (ВП) и электромеханических преобразователей и систем на их основе – управляемых вентильноэлектромеханических систем (УВЭМС) проводится на основе универсальной установки объединяющей системы “Г – МПТ”, “Г – АМ”, “Г – СМ”. Базой математического моделирования являются разработанные математические модели УВЭМС и программы на их основе [25] с использованием специализированных пакетов Mathcad, Matlab.
ММ непосредственных преобразователей энергии (НПЭ) строятся на основе разработанной концепции [2], суть которой состоит в представлении механизма управления НПЭ как процесса дискретного управления начальной фазой единственного гармонического колебания. Выходное напряжение U ( ω 2 t ) каждой фазы НПЭ при этом рассматривается как единственное гармоническое колебание с дискретно управляемой начальной фазой. Дискретность изменения фазы Δ φ =2 π / m определяется эквивалентным количеством фаз входного напряжения m , участвующих в формировании каждой фазы выходного напряжения (количеством пульсов входного напряжения в периоде выходного). На основе предложенной концепции введено понятие вектора фазового состояния (фазосмещения) (ФС), определяющего положение вектора выходного напряжения НПЭ на n -фазном симметричном ЭМП
0 ( t ) = ejH [ t N
.
Все возможные способы управления при этом задаются во времени t переключающей функцией амплитуды h i 1 [ t ] и фазы h j 2 [ t ], а процедура преобразования электрической энергии n- фазного НПЭ при раздельном управлении описывается моделью
U2 (ш21 ) = H [t ]• Ui (to1t)
h 1 [ 1 ] =
h , [ 1 ] 0 0
0 h 22 [ 1 ] 0
... 0
... 0
0 0 h pp [ 1 ] ... 0
в ф а зе А; ABC – отключены ПЭ в фазе В ; ABC – отключены ПЭ в фазе С ; ABC – отключены ПЭ в фазах А, В, С . Введён оператор поворота
- 1 при повороте на - 2п/3-
0 0 0
... h nn [ 1 ] _ -
w = < 0 при нулевом повороте-
;
+ 1 при повороте на +2п/3.
U 1 ( ® 1 1 ) = U m
sin ( rn , 1 + h 12 [ 1 ] • Аф ) sin ( to , 1 + h 22 [ 1 ] • Аф )
sin ( to 1 1 + h g [ 1 ] • Аф )
sin ( to , 1 + h m [ 1 ] • Аф ) ;
U 1 ( ® 2 1 )
U 2 ( ® 2 1 )
U 2 ( ® 2 1 ) =
На базе теории обобщённого ЭМП, предложенной концепции и модели НПЭ, разработан математический аппарат решения задач анализа, синтеза и моделирования управляемых ВЭМС с НПЭ. При представлении математических моделей ЭМП в двухфазной системе координат α,β напряжения, синтезируемые НПЭ, также должны быть приведены к общей системе координат.
При заданных значениях переменных x α, x β с учётом введённого оператора поворота w значения переменных x 1 , x ’ в новой системе координат могут быть вычислены так:
Up ( ®21)
x а

- 0.5
_Un ( ® 21 ) .
х в
.

x e
Для НПЭ с однократной модуляцией (ОМ) переключающие функции в каждой фазе взаимосвязаны и равны:
H 2 [ 1 ] = H 2 [ 1 ] + mln H 2 [ 1 ] = H 2 [ 1 ] + 2 m/n
; .
Следовательно, задание всех управляющих воздействий в этих НПЭ возможно заданием закона изменения одной ПФ фазы. Выходное напряжение НПЭ представим в виде произведения ПФ амплитуды, m -мерного вектора гармонического колебания S ( ю , 1 ) = Ume^ ^ 1 ' и вектора ФС, т.е.
U (to21 ) = H1 [ 1 ] S (to,1)®(1)
При переключениях НПЭ имеет мгновенную несимметрию. Следовательно, его моделирование целесообразно проводить в трёхфазной системе координат, но это требует пересчёта значений переменных из трёхфазной системы координат в двухфазную и обратно. Для обобщённой записи такого перехода введены множители K A , K B B , K C , равные единице при совмещении соответствующей фазы A , B или C с осью α, и – нулю в противном случае. Введём матрицы перехода от трёхфазной системы координат к двухфазной и обратно
Р = = 1 23
K A K B K C
( K C - K B ) ( K A - K C ) ( K B - K A )
В случае трёхфазного выхода в соответствии с принятой концепцией НПЭ любой сложности, независимо от количества фаз m входного напряжения U ( ω 1 t ), принципов и способов управления, может быть задан минимальным количеством структур, соответствующих количеству возможных состояний тиристорного коммутатора : ABC–ПЭ во всех фазах ( А, В, С ) включены; ABC – отключены ПЭ
K A
C
K B
K B
K A
K C
K C
K B
K A
.
Для перехода из трёхфазной системы координат в двухфазную получим
x а

xb
xc
При обратном переходе значения переменных в трёхфазной системе координат x a , x b , x c находятся из системы уравнений
a

b
- 0.5
- 0.5


x а
Проведено обобщение и разработка ММ управляемых ВЭМС на базе машин постоянного тока, синхронных и асинхронных машин [2]. Задание переключающей функции h j 2 [ t ] для НПЭ с ОМ определяется его характерной особенностью, состоящей в постоянстве шага переключения переключающих элементов НПЭ. Моделирование этих систем обеспечивается заданием цикла переключения n 1 и количества фаз входного напряжения, участвующих в формировании каждой фазы выходного напряжения. Мгновенное значение фазы входного гармонического колебания ω 1 t в момент коммутации изменяется на величину дискретности изменения начальной фазы Δ φ =2 π / m . На рис. 3-5 в качестве примера приведены результаты моделирования с использованием (1) – (9) системы “НПЭ – АМ” с ОМ.
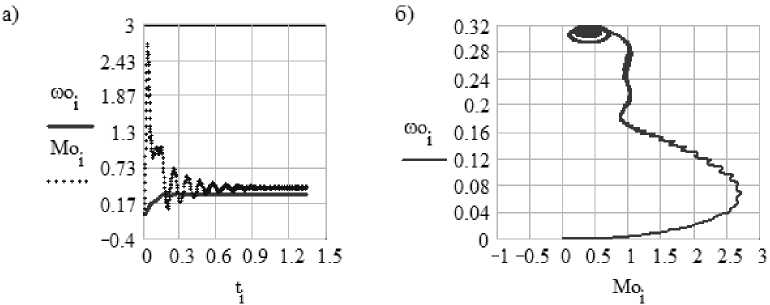
Рис. 3. Переходная характеристика момента и скорости (а), динамическая механическая характеристика (б) системы «НПЭ – АМ» при ОМ n 1=45 ( m =6) при f 2 =16,667 Гц, двигатель АО2 – 31 – 4
Взаимосвязь параметров НПЭ при заданных количествах шагов N на периоде T 1 входного m -фазного напряжения и n 1 в цикле переключения переключающей функции фазы h j 2 [ t ] с дискретностью Δφ определяется формулами
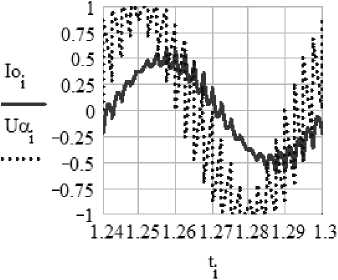
Рис. 4. Зависимости напряжения U α , тока I 0 , потокосцепления ψ α от времени n 1=45 ( m =6), f 2 =16,667 Гц, двигатель АО2 – 31 – 4

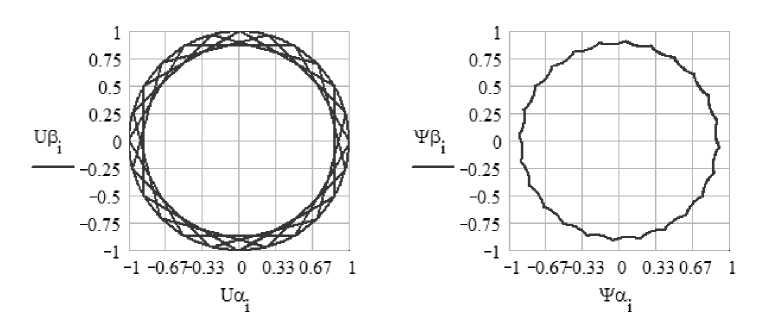
Рис. 5. Годографы напряжений U , и потокосцепления ψ α статора n 1=45 ( m =6), f 2 =16,667 Гц, двигатель АО2 – 31 – 4
Выводы: совокупность разработанных математических моделей, программных средств, экспериментальных установок, методического обеспечения по исследованию ЭМП, вентильных преобразователей и управляемых вентильно-электромеханических систем на их основе образует интегрированный электромеханический комплекс – элемент, обеспечивающий научные и учебные исследования УВЭМС.
Список литературы Интегрированный электромеханический комплекс
- Прошин, И.А. Концепция построения интегрированных комплексов сетевых автоматизированных лабораторий/И.А. Прошин, Д.И. Прошин, Р.Д. Прошина//Известия Самарского научного центра Российской академии наук. 2009. Т. 11, № 5 (2). С. 527-530.
- Прошин И.А. Управление в вентильно-электромеханических системах. Кн. 1. Управление непосредственными преобразователями электрической энергии. -Пенза: ПТИ, 2002. 333 с.
- Прошин И.А. Управление в вентильно-электромеханических системах. Кн. 2. Математическое моделирование вентильно-электромеханический систем. -Пенза: ПТИ, 2003. 306 с.
- Прошин И.А. Управление в вентильно-электромеханических системах. Кн. 3. Синтез управляемых вентильно-электромеханический систем. -Пенза: ПТИ, 2003. 320 с.
- Прошин И.А. Программное средство "НПЭ -АД" для исследования вентильно-электромеханических систем с асинхронным электродвигателем (Пакет расширения к системе Matlab 6.0)/И.А. Прошин, В.В. Бурков, Е.А. Кутузов, В.В. Усманов//Заявка №2004610841. Зарегистрировано в Реестре программ для ЭВМ 4-го июня 2004 г.
