Интегрирующая синхронизация тиристорных регуляторов как средство повышения электробезопасности обслуживающего персонала

Автор: Цытович Леонид Игнатьевич, Суворов Иван Флегонтович, Смирнов Юрий Сергеевич, Хусаинов Шамиль Нагимович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Электроэнергетика
Статья в выпуске: 2 т.14, 2014 года.
Бесплатный доступ
Дается краткий анализ причин отказов ведомых сетью вентильных преобразователей. Отмечается, что слабым звеном их структур являются устройства синхронизации, подверженные действию помех со стороны источника электроснабжения.Рассматривается принцип построения тиристорного регулятора переменного напряжения (ТРН) на базе синхрофазосдвигающего устройства (СФС), совмещающего в себе функции регулятора, устройства синхронизации (УС), фазосдвигающего устройства и генератора «пакета» высокочастотных импульсов управления тиристорами. Силовой блок ТРН выполнен по схеме «тиристор - диод». Приведены функциональная схема ТРН, предназначенного для дискретно регулируемых асинхронных электроприводов. ТРН работает по принципу ограничения пускового тока асинхронного электродвигателя на заранее заданном уровне. Представлена структурная схема системы управления и канала синхронизации, выполненных на базе интегрирующих развертывающих преобразователей (РП). Определены условия синхронизации РП гармоническим сигналом и биполярными прямоугольными импульсами со средним нулевым значением. Даны основные аналитические соотношения, описывающие статический режим работы РП. Отмечена способность синхронизированного РП адаптироваться к параметрам напряжения сети. Приведены диаграммы сигналов канала синхронизации и преобразователя аналогового сигнала в уголуправления силовыми тиристорами.Кратко изложены основные результаты промышленного внедрения ТРН. Отмечено, что в результате реконструкции прекратились аварийные отказы электрооборудования и травматизм обслуживающего персонала.
Регулятор переменного напряжения, асинхронный электропривод, развертывающий преобразователь, релейный элемент
Короткий адрес: https://sciup.org/147158259
IDR: 147158259 | УДК: 621.316.91
Integrating synchronization of the thyristor controller as the staff electrical safety increasing device
A brief analysis of the causes of failures of rectifier converters led by network is given. It is mentioned that the weak link of their structures is synchronizers subjected to interference effects from the power supply.The principle of thyristor AC voltage controller (TVC) based on synchro-phase-shifting device is considered. It combines the functions of controller, synchronizer, phase-shifting device and high-frequency pulse packet generator for thyristor controlling. TVC power unit is made on a “Thyristor - Diode” scheme. A functional diagram of TVC designed for discretely controlled induction motor drives is shown. TVC works on the principle of limiting the induction motor inrush current at a predetermined level. The article presents the block diagram of the control system and the synchronization channel based on integrating sweep converters (SC). The conditions of the SC synchronization by the harmonic signal and bipolar rectangular pulses with an average zero value are determined. The authors give the main analytical relations describing the SC static mode. The ability of the synchronized SC to adapt to the voltage parameters is mentioned. The paper also presents the signal diagrams of the synchronization channel and the analog signal to the power thyristors control angle converter.The main results of industrial application TVC are summarized. It is noted that due to the reconstructionelectrical equipment failures and staff injuries were stopped.
Текст научной статьи Интегрирующая синхронизация тиристорных регуляторов как средство повышения электробезопасности обслуживающего персонала
Современные системы электроснабжения промышленных предприятий характеризуются высоким уровнем коммутационных искажений и импульсных перенапряжений, что является одной из наиболее распространенных причин выхода из строя по каналам синхронизации ведомых сетью вентильных преобразователей и возникновения на объекте аварийной ситуации. В этих условиях необходимо особо тщательно подходить к проблеме минимизации количества элементов информационной и силовой электроники в системах регулирования электроприводами при одновременном повышении надежности их функционирования.
Теоретическая часть
Вопросам обеспечения электробезопасности обслуживающего персонала за счет контроля параметров систем электроснабжения посвящено много работ [1–6]. Ниже приводятся методы и подходы обеспечения электробезопасности за счет развития новых методов управления электротехническими комплексами.
ТРН представляет собой традиционную синхронную трехканальную систему импульсно-фазового управления (СИФУ) с силовыми ключами VS, выполненными по схеме «тиристор – диод». Его отличительной особенностью является система импульсно-фазового управления, где каждый из каналов фаз А, В, С содержит интегрирующее СФС устройство (СФС-А, СФС-В, СФС-С), совмещающее в себе устройство синхронизации (УС), регулятор, фазосдвигающее устройство и формирователь импульсов управления силовыми тиристорами [7]. Контур обратной связи по току электродвигателя М реализован на трансформаторах тока ТТА, ТТВ, ТТС и демодуляторе ДМ [8].
СФС-А, СФС-В, СФС-С выполнены по идентичной схеме на базе интегрирующих развертывающих преобразователей (РП) [9].
Структурная схема синхрофазосдвигающего устройства, например, фазы А включает три РП, из которых два РП-1, РП-2 выполняют функции УС. В состав РП-1, РП-2 входят сумматоры Σ1, Σ2, интеграторы И1, И2, пропорциональные звенья К1, К2 и релейные элементы РЭ1, РЭ2.
С помощью К1, К2 устанавливается требуемый коэффициент передачи РП-1, РП-2. УС включает также инвертор Ин. и генератор импульсов малой длительности ГИ. Ин. передает на выход только «отрицательный» выходной импульс РЭ2 с одновременным его преобразованием в импульс положительной полярности. ГИ формирует на выходе импульс стабильной амплитуды и длительности. Запуск ГИ происходит по заднему фронту выходных импульсов инвертора Ин.
РП-3, с помощью которого сигнал управления преобразуется в угол управления силовыми ключами VS, реализован на сумматоре Σ3, интеграторе И3, релейном элементе РЭ-3 и канале динамической коррекции ДК, включающем нелинейный элемент НЭ и дифференцирующее звено Д с постоянной времени ТД. НЭ выполнен с порогом включе- ния –С. В дальнейшем коэффициент передачи РП-3 по каждому из входов принимаем равным 1,0.
Интеграторы И1–И3 имеют передаточную функцию вида W ( p ) = 1/ Т И р , где Т И - постоянная времени. Релейные элементы РЭ1–РЭ3 реализованы с неинвертирующей петлей гистерезиса, а их пороги переключения ± b симметричны относительно нулевого уровня. Выходной сигнал РЭ1-РЭ3 меняется дискретно в пределах ± А .
Работа канала синхронизации УС (рис. 1, а) системы управления ТРН базируется на следующих положениях [9].
РП-1 и РП-2 в исходном состоянии представляют собой автоколебательную систему с частотно- широтно-импульсной модуляцией. Особенностью таких систем является то, что при соблюдении определенных условий они могут переходить в режим вынужденных переключений (синхронизации) с внешним периодическим сигналом и преобразовываться из частотно-широтно-импульсной в широтно-импульсную систему.
При этом РП-1 синхронизируется с напряжением сети Х С ( t ) = А С sin го t , для чего необходимо выполнение условий:
2 T A
—C—— > 1, п dYИ(t)/dt < dXC(t)/dt,
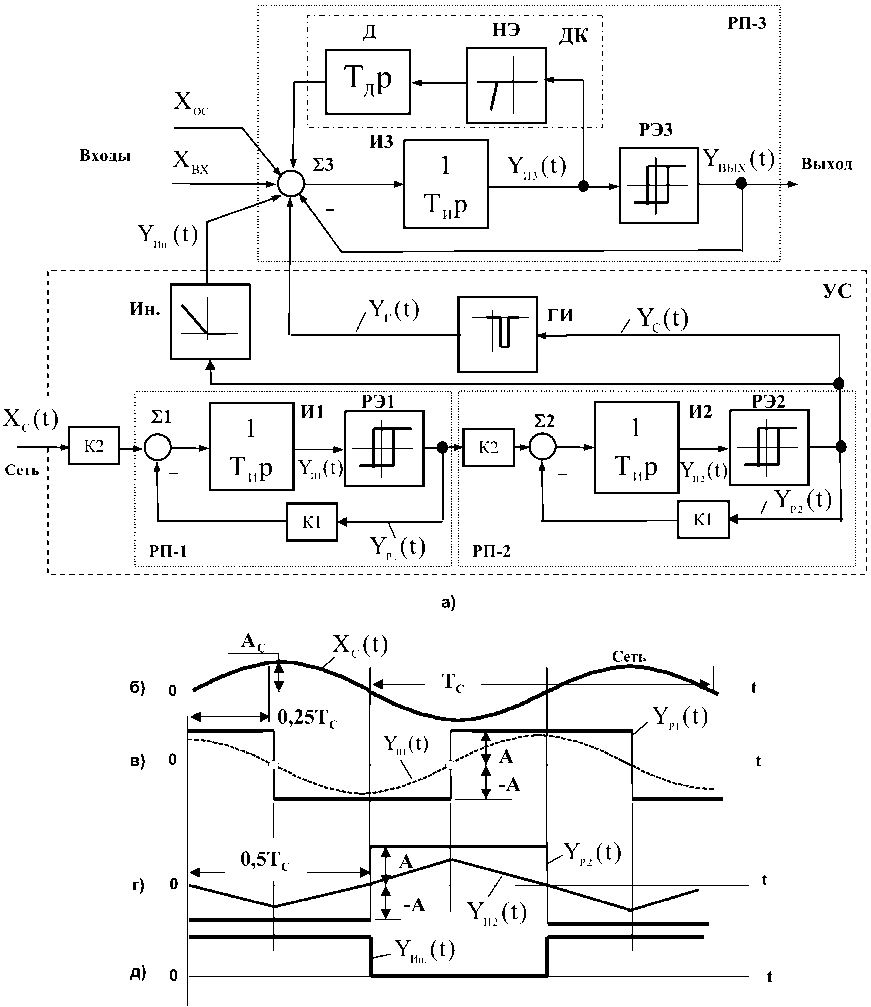
Рис. 1. Структурная схема СФС устройства управления ТРН (а) и временные диаграммы сигналов устройства синхронизации (б–д)
где Т С = Т C / Т 0 , А С = | А С/ А | - нормированные значения периода Т С и амплитуды А С сигнала Х С ( t ) соответственно; Y И1 ( t ) – выходной пилообразный сигнал развертки на выходе интегратора И1 при работе РП-1 в режиме собственных автоколебаний, ограниченный по амплитуде порогами переключения ± Ь РЭ1. При этом производная синхронизирующего воздействия Х С ( t ) при его переходе через нулевой уровень должна превышать производную пилообразного сигнала развертки Y И1 ( t ) , которую она имеет при работе РП-1 в режиме собственных автоколебаний с нулевым значением постоянной составляющей сигнала на его информационном входе. При синхронизации РП-1 сигналом Х С ( t ) = А С sin to t (рис. 1, б) выходной сигнал интегратора И1 имеет гармоническую форму (рис. 1, в) и сдвинут относительно сигнала синхронизации на –90 эл. град. Среднее значение выходных импульсов Y P1 ( t ) РЭ1 равно нулю (рис. 1, в).
РП-2 канала синхронизации СФС также работает в режиме внешней синхронизации, только синхронизирующим воздействием являются прямоугольные биполярные импульсы с выхода РП-1 (рис. 1). При этом должно соблюдаться условие foAo > 1, (2)
где Т o = Т o / Т о - нормированное значение периода Т П прямоугольных импульсов синхронизации; Т о = 4 ЬТ И - период выходных импульсов РП2 при его работе в режиме собственных автоколебаний; Ь = |Ь/А | - нормированное значение порогов переключения РЭ2; ± А - амплитуда выходных импульсов РЭ2; А П = А П / А | - нормированное значение амплитуды импульсов синхронизации (кратность синхронизации); Т И – постоянная времени интегратора И2. Иными словами, синхронизация РП-2 биполярными прямоугольными импульсами с выхода РП-1 наступает при условии превышения модулем вольт-секундной площади синхронизирующего воздействия значения модуля вольт-секундной площади выходных импульсов РП-2 за период его собственных автоколебаний.
Фазовый сдвиг между синхронизирующим воздействием Х С ( t ) и выходными импульсами РП-1 зависит от нормированной частоты f C = f с К f о = Т - 1) сигнала синхронизации и А С . Равенство а с = -90 эл. град., которое наиболее приемлемо для построения каналов синхронизации вентильных преобразователей на основе РП, достигается при условии равенства частоты собственных автоколебаний РП-1 (РП-2) и частоты сигнала синхронизации Х С ( t ) ( Y P1 ( t )).
РП-2 также имеет передаточную функцию вида W ( p ) = К П2 /(1 + Т Э p ), но постоянная времени Т ^
зависит только от частоты напряжения сети, так как амплитуда выходного сигнала Y P1 ( t ) РЭ1, которым синхронизируется РП-2, имеет постоянное значение, пропорциональное напряжению питания УС. Выходной сигнал Y И2 ( t ) интегратора И2 близок по форме к симметричной «пиле» (рис. 1, г), а на выходе РЭ2 импульсы Y P2 ( t ) сдвинуты относительно сигнала Х С ( t ) на –180 эл. град. Величина К П2 определяется звеньями К1, К2 канала РП-2. Сделать РП-2 адаптивным к амплитуде сигнала Х С ( t ) с технической точки зрения не представляет затруднений, однако, как показала практика, в промышленных технологических системах в этом нет необходимости.
С помощью инвертора Ин. выходной сигнал РП-2 преобразуется в импульс положительной полярности Y Ин. ( t ) , длительность которого соответствует длительности положительной полуволны напряжения сети (рис. 1, б, д).
Результаты экспериментальных исследований показали, что кратность синхронизации для РП-1 должна выбираться в пределах | А С / Х д | > 2,5 ^ 10,0, что в каждом конкретном случае определяется уровнем помех и коммутационных искажений напряжения сети. Здесь Х д = А /К П1 - допустимый входной сигнал РП-1, при котором в нем сохраняется режим автоколебаний. Что касается РП-2, то здесь глубина синхронизации может быть выбрана на уровне 1,5–2,5, так как амплитуда выходного сигнала РП-1, синхронизирующего РП-2, фиксирована и вероятность срыва режима синхронизации в РП-2 практически равна нулю.
Таким образом, УС представляет собой каскадное включение двух замкнутых интегрирующих систем с параметрами, частично или полностью адаптируемыми к параметрам напряжения сети. Это является основным отличительным признаком такой синхронизации по сравнению с традиционными техническими решениями типа «фильтр – релейный элемент».
Рассмотрим работу канала РП-3.
При отсутствии звеньев Ин. и ГИ устройство представляет собой частотно-широтноимпульсную систему с периодом автоколебаний Т 0 = 4 ЬТ И/ (1 - Х В2Х ), где Ь = \Ь/А\ - нормированная величина порогов переключения РЭ3; Х вХ = Х ВХ / А | - нормированное значение входного сигнала управления Х ВХ . Среднее значение выходных импульсов Y ВЫХ ( t ) РП-3 за период его автоколебаний пропорционально значению Х ВХ .
Считаем, что входной сигнал Х ВХ и сигнал обратной связи Х ОС равны нулю (рис. 1, а; 2, а). Амплитуда импульсов Y Ин. ( t ) (рис. 2, б) должна удовлетворять условию А С 1 > Х д , где Х д - до-
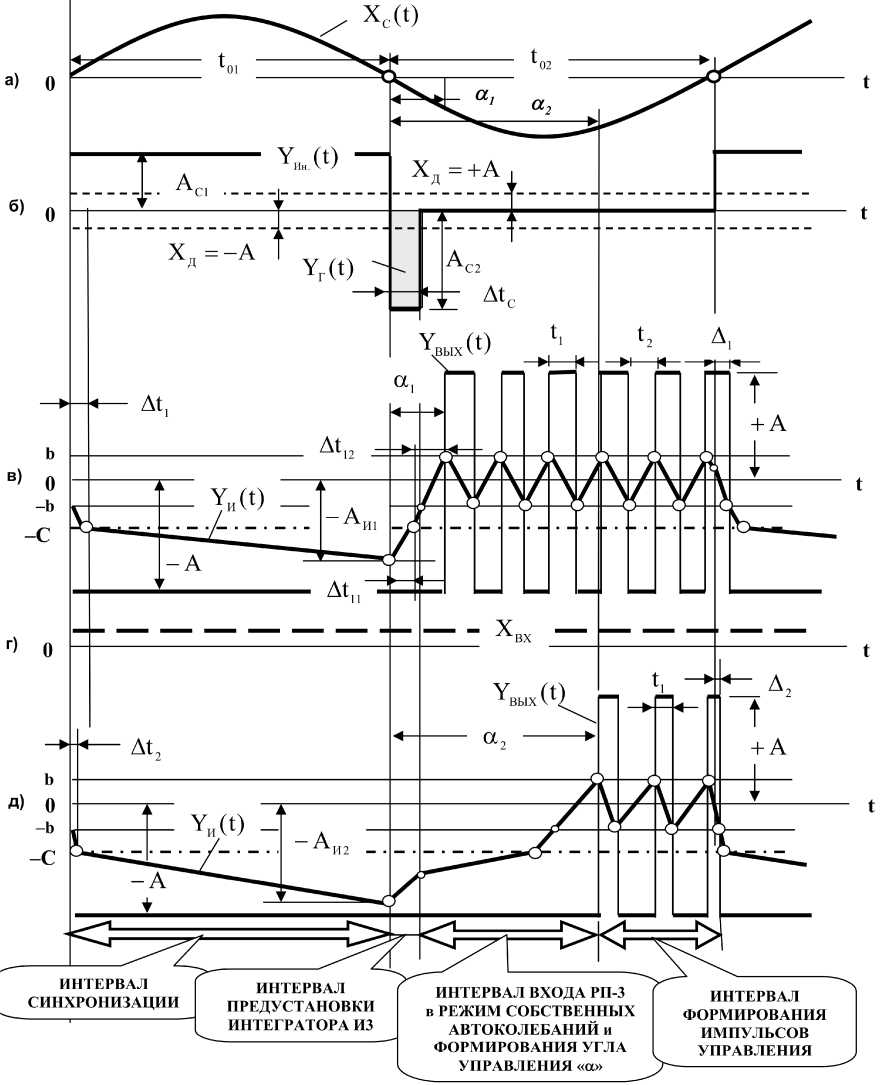
Рис. 2. Временные диаграммы сигналов синхрофазосдвигающего устройства управления ТРН
пустимый уровень входного сигнала РП-3, при котором в нем сохраняется режим устойчивых автоколебаний. При коэффициенте передачи РП-3 (рис. 2, а), равном единице, ХД = А . Полагаем также, что момент подачи на вход РП-3 импульса Y Ин. ( t ) (рис. 2, б) совпадает с моментом переключения РЭ3 в состояние –А , когда сигнал развертки на выходе интегратора И3 Y И3 ( t ) = - b (рис. 2, в).
Тогда на интервале времени Δ t 1 (рис. 2, в) развертка Y И3 ( t ) под действием разности сигналов
АС1 - А (рис. 2, б, в) будет линейно изменяться в отрицательном направлении до тех пор, пока не достигнет порога –С звена НЭ. При включении НЭ в цепь обратной связи И3 включается звено Д, что приводит к увеличению постоянной времени интегратора РП-3 до величины ТИ∗ и снижению производной сигнала YИ3(t) на интервале t01 -∆t1 (рис. 2, а, в). В результате за время t01 внешней синхронизации РП-3 выходной сигнал интегратора И3 достигает амплитуды -АИ1 . На этом этап син- хронизации РП-3 внешним гармоническим воздействием заканчивается.
После изменения знака сигнала Х С ( t ) (рис. 2, а) и выключения Ин. (рис. 2, б) запускается ГИ, формирующий в течение времени A t C импульс Y r ( t ) отрицательной полярности с амплитудой | АС 2| ^ А С1 . При этом РП-3 переходит на этап установки «нулевых» условий в интеграторе И3. При этом в течение времени A t 11 темп нарастания сигнала Y И3 ( t ) определяется постоянными времени Т И и Т И , а в интервале A t 12 зависит от собственной постоянной времени интегратора И3 (рис. 2, в). После этого РП-3 входит в режим собственных автоколебаний с частотой, намного превышающей частоту гармонического сигнала Х С ( t ) , формируя тем самым «пакет» импульсов управления силовым тиристором. Так как сигнал управления отсутствует, интервалы t 1 = t 2 , а выходной сигнал И3 ограничен по амплитуде порогами переключения РЭ3. Начальный угол управления силовым тиристором составляет а 1 (рис. 2, а, в).
При наличии входного сигнала, например, Х ВХ > 0 (рис. 2, г) интервал A t 1 (рис. 2, в) уменьшается до значения A t 2 (рис. 2, д), а сигнал У И3 ( t ) за интервал синхронизации t 01 достигает амплитуды А И2| > А И1| (рис. 2, в, д), так как на вход интегратора действует результирующий сигнал А С 1 + Х ВХ — А (рис. 2, б, г, д). На интервале A t C и далее до момента времени выполнения условия У И3 ( t ) > - С (рис. 2, б, д) происходит снижение амплитуды развертки Y И3 ( t ) с производной меньшей, чем в случае Х ВХ = 0 (рис. 2, в), что обусловлено наличием на входе РП-3 постоянной составляющей Х ВХ . В результате угол управления увеличивается до величины а 2 (рис. 2, а, д). Здесь следует учитывать, что одновременно уменьшается длительность импульса Y ВЫХ ( t ) положительной полярности при работе РП-3 в режиме собственных автоколебаний.
Начало следующего интервала синхронизации РП-3 может происходить с ошибкой по времени A 1 (рис. 2, в) или A 2 (рис. 2, д) относительно переднего фронта импульсов Y C ( t ) (рис. 2, б). Однако при достаточно высокой собственной частоте автоколебаний РП-3, отличающейся от частоты сигнала синхронизации Х С ( t ) , например, на два порядка, величины A 1 , A 2 являются пренебрежимо малыми и существенно не влияют на асимметрию импульсов управления силовыми тиристорами.
Практическая часть
На основе рассмотренного ТРН в 2004 г. была реализована система управления оборотным циклом водоснабжения промышленного предприятия, содержащая 3 асинхронных электропривода по 75 кВт каждый. Два канала регулирования являлись рабочими, один – резервным.
До реконструкции электроприводов, которые также были оснащены ТРН известной зарубежной фирмы, в среднем за год возникали 2–3 аварийные ситуации, сопровождающихся срабатыванием силовых защит и остановкой технологического процесса. Анализ причин возникновения аварийных отключений однозначно указывал, что в большинстве случаев причиной была неудовлетворительная работа УС, выполненных по традиционной схеме «фильтр – компаратор». Из личных бесед с персоналом цеха установлено, что при этих авариях были случаи травматизма персонала, но конкретные данные по причинам и частоте таких случаев, когда пострадали люди, предоставлено не было. За 9 лет эксплуатации электроприводов после их реконструкции не было зафиксировано ни одного случая аварийного останова технологического процесса по вине силового или информационного электронного оборудования.
Выводы
-
1. Определены условия синхронизации РП гармоническим сигналом и биполярными прямоугольными импульсами со средним нулевым значением. Даны рекомендации по выбору глубины синхронизации РП гармоническим сигналом и биполярными импульсами.
-
2. Предложено интегрирующее устройство на базе РП, совмещающее в себе регулятор, формирователь «пакета» импульсов и усилитель мощности, что существенно упрощает систему управления ТРН.
-
3. Кратко изложены результаты промышленного внедрения ТРН, что позволило значительно повысить надежность работы электроприводов и исключить тем самым вероятность травматизма обслуживающего персонала.
Список литературы Интегрирующая синхронизация тиристорных регуляторов как средство повышения электробезопасности обслуживающего персонала
- Серёжин, К.С. Способ автоматического контроля параметров нулевого провода воздушных линий 0,4 кВ/К.С. Серёжин, И.Ф. Суворов, А.И. Сидоров//Вестник ЮУрГУ. Серия «Энергетика». -2009. -№ 15 (148). -С. 23-26.
- Пат. 2351048 Российская Федерация. Способ функциональной диагностики асинхронных электродвигателей/В.А. Пономарев, И.Ф. Суворов, А.С. Юдин, А.В. Портнягин. -Заявл. 09.01.2008; опубл. 27.03.2009, Бюл. № 9.
- Пат. 2356151 Российская Федерация. Способ автоматического контроля параметров нулевого провода воздушных линий 0,4 кВ/К.С. Сережин, И.Ф. Суворов, А.И. Сидоров. -Заявл. 15.02.2008; опубл. 20.05.2009, Бюл. № 14.
- Хусаинов, Ш.Н. Исследование влияния величины проводимости изоляции в месте повреждения на точность её определения косвенным методом/Ш.Н. Хусаинов, Р.Р. Нараева//Вестник ЮУрГУ. Серия «Энергетика». -2008. -№ 11 (111). -С. 9-15.
- Хусаинов, Ш.Н. Улучшенный метод определения проводимостей изоляции участка сети, содержащего линию с отпайкой, по результатам измерения режимных параметров/Ш.Н. Хусаинов, А.В. Сидоров, Н.А. Хусаинова//Вестник ЮУрГУ. Серия «Энергетика». -2002. -№ 2. -С. 24.
- Цытович, Л.И. Система управления группой асинхронных электроприводов с самодиагностированием и автоматическим резервированием каналов регулирования/Л.И. Цытович, О.Г. Терещина, М.М. Дудкин//Электротехника. -2006. -№ 11. -С. 38-44.
- А.c. 515117 СССР, МКИ G06G7/12. Релейный операционный усилитель/Г.В. Суворов, О.И. Осипов, Л.И. Цытович, В.Г. Маурер. -№ 2055243/24; заявл. 20.08.74; опубл. 25.05.76, Бюл. № 19.
- Системы управления электроприводами буровых cтанков с источниками электропитания ограниченной мощности/Р.Х. Гафиятуллин, Л.И. Цытович, В.Г. Маурер, Р.М. Рахматулин//Тез. докл. I Междунар. конф. по автоматизированному электроприводу «AED-95». -СПб., 1995. -C. 95.
- Качалов, А.В. Интегрирующие устройства синхронизации для систем импульсно-фазового управления вентильными преобразователями/А.В. Качалов, Л.И. Цытович, М.М. Дудкин//Практическая силовая электроника. -2010. -№ 1 (37). -С. 42-51.
