Интегрирующий аналого-цифровой датчик нулевого тока

Автор: Цытович Леонид Игнатьевич, Дудкин Максим Михайлович, Брылина Олеся Геннадьевна, Мацин Валерий Павлович
Журнал: Вестник Южно-Уральского государственного университета. Серия: Энергетика @vestnik-susu-power
Рубрика: Преобразовательная техника
Статья в выпуске: 37 (296), 2012 года.
Бесплатный доступ
Рассматривается новый принцип построения аналого-цифрового датчика нулевого тока (ДНТ) на основе интегрирующего развертывающего преобразователя (РП), предназначенного для систем управления реверсивными тиристорными преобразователями (ТП) с раздельным управлением. Приведены структурная схема и временные диаграммы его сигналов. Показано, что применение интегрирующего развертывающего преобразователя позволяет обеспечить высокую помехоустойчивость, а цифровой алгоритм обработки данных - повышенную точность работы.
Датчик нулевого тока, развертывающий преобразователь, тиристорный преобразователь, частотно-широтно-импульсная модуляция (чшим), интегратор, релейный элемент, аналого-цифровое преобразование
Короткий адрес: https://sciup.org/147158206
IDR: 147158206 | УДК: 62-83:681.51(075.8)
Integrating analog-digital zero current sensor
The new principle of constructing analog-digital zero current sensor (ZCS) on the basis of integrating scanning converter meant for control systems of reversed thyristor converters with separate control is considered. The structure chart and its timing diagrams of signals are given. It is mentioned that the application of the integrating sweep converter allows to provide high noise stability and digital algorithm of data processing allows to provide higher accuracy of operation.
Текст научной статьи Интегрирующий аналого-цифровой датчик нулевого тока
Высокий уровень помех в каналах передачи информации систем управления технологическими процессами является одной из причин сбоев в работе силовой преобразовательной техники [1], в частности, реверсивных тиристорных преобразователей (ТП) постоянного тока с раздельным управлением. Здесь одним из наиболее чувствительных к внешним помехам элементом системы управления ТП являются датчики нулевого тока (ДНТ), построение которых традиционно базируется на том или ином варианте схем компараторов [2]. При этом уровень фильтрации сигналов помех на входе ДНТ зачастую ограничивается требованиями к быстродействию системы управления технологическим объектом.
Одним из эффективных путей повышения помехоустойчивости систем управления ТП является применение методов аналого-цифрового интегрирующего развертывающего преобразования [3–5].
Ниже рассматривается принцип построения интегрирующего ДНТ повышенной помехоустой- чивости на базе частотно-широтно-импульсного развертывающего преобразователя (РП) с цифровым методом обработки выходного сигнала.
ДНТ на рис. 1, а отличается от известной аналоговой схемы [6] способом фиксации нулевого значения входной координаты, для чего период выходных импульсов РП преобразуется в цифровой код, который сравнивается с заранее заданным значением, пропорциональным периоду автоколебаний РП при нулевом уровне входного сигнала.
Для этой цели здесь служат ключевой элемент Кл., одновибраторы ОВ1, ОВ2, генератор счетных импульсов стабильной частоты G , элемент задержки DL , счетчик СТ , регистр памяти RG , цифровой компаратор ЦК, элемент Л1 «2И», элемент Л2 « n И-НЕ», блок Л3 функции «2ИЛИ» и источник опорного цифрового кода ИК.
В основе ДНТ лежит интегрирующий РП (рис. 1, а), состоящий из сумматора Σ, интегратора И, релейного элемента РЭ с неинвертирующей петлей гистерезиса и симметричными относительно
Преобразовательная техника
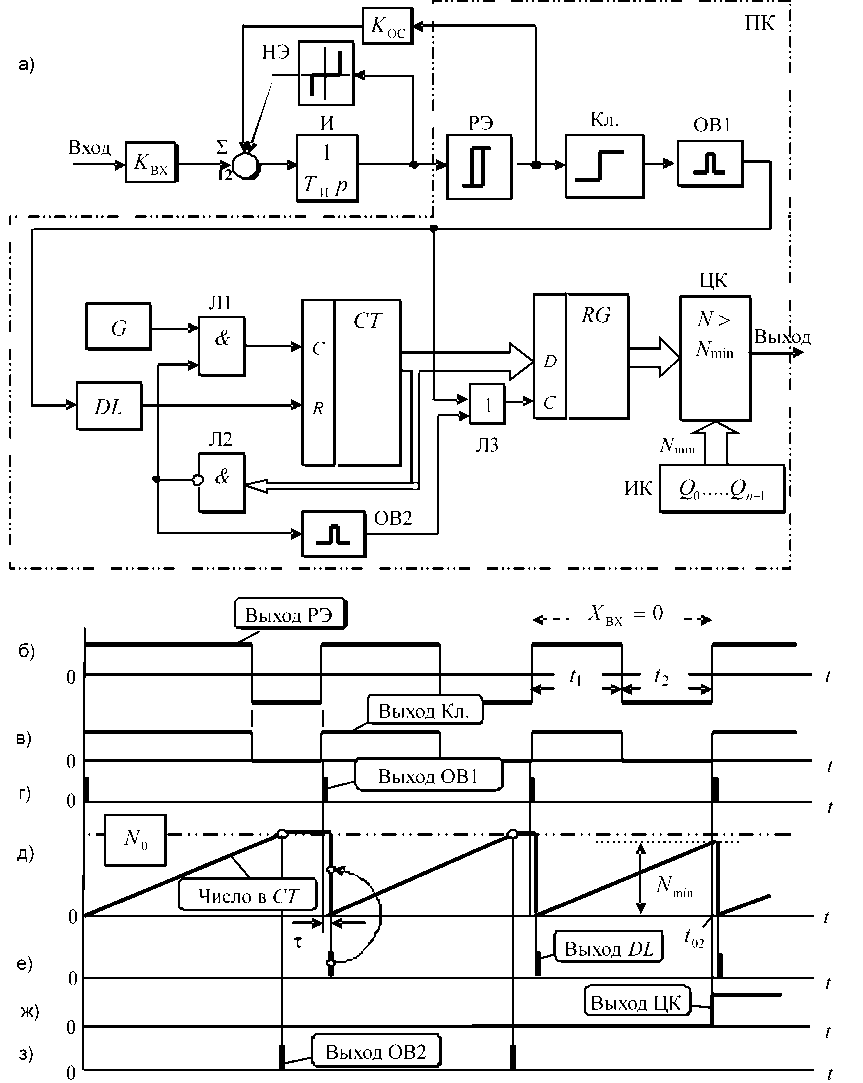
Рис. 1. Структурная схема (а) и временные диаграммы сигналов (б–з) интегрирующего аналого-цифрового датчика нулевого тока
нулевого уровня порогами переключения ± b , а также пропорциональные звенья К ВХ и К ОС на входе и в цепи обратной связи, определяющие величину коэффициента передачи К П РП со стороны информационного входа.
В исходном состоянии при входном сигнале, удовлетворяющем условию | Х ВХ | < (| ± Х д | = 1±А / K П |), РП работает в режиме автоколебаний с ЧШИМ. Здесь ± А - амплитуда выходных импуль
сов РЭ; ±Х д - допустимый уровень сигнала Х ВХ, соответствующий линейному участку модуляционной характеристики. Период автоколебаний оп-
ределяется соотношением
Т о =
4 bТ И
1 - Х ВХ
где b = | b / A - нормированное значение порогов переключения РЭ; T И – постоянная времени инте-
гратора И; Х ВХ = | Х ВХ К П / А\ - нормированное значение входного сигнала ДНТ.
Наличие тока в цепи нагрузки ТП переводит РП в заторможенный режим, когда выходной сигнал РЭ принимает одно из статических положений ±А . Для этого параметры звеньев К ВХ и К ОС подбираются таким образом, чтобы входной сигнал X ВХ ДНТ значительно превышал бы допустимое значение ±Х Д . Как правило, для этого необходимо обеспечить К П = 100 … 300.
По мере снижения тока нагрузки РП стремится перейти в режим автоколебаний (рис. 1 б), что происходит, когда входной сигнал становится меньше величины ± Х Д .
Нелинейный элемент НЭ с зоной нечувствительности | ± b 0 | > |± b | в цепи обратной связи интегратора И (рис. 1, а) уменьшает время задержки выхода ОУ интегратора из режима «насыщения» при выполнении условия (| ± Х ВХ | < | ± А / K П|), что повышает быстродействие ДНТ.
Ключ Кл. предназначен для преобразования биполярных выходных импульсов РЭ в однополярный сигнал (рис. 1 б, в), что необходимо для «стыковки» выхода РЭ с элементами цифровой электроники. ОВ1 формирует импульсы малой длительности синхронно с передним фронтом сигнала на выходе Кл. (рис. 1, в, г), а импульс на выходе ОВ2 появляется при достижении в счетчике заранее заданного числа N 0 (рис. 1, д, з), когда Л2 переходит в нулевое состояние и накопление числа в счетчике СТ прекращается. Запись данных в регистр памяти RG производится выходными импульсами ОВ1, а «обнуление» СТ осуществляется с задержкой τ , формируемой с помощью DL (рис. 1, г–е).
При уменьшении ХВХ до нулевого значения период следования импульсов на выходе РЭ становится минимальным (рис. 1, б, t1 = t2) и соответствует числу Nmin = TХВХ = 0 / ТG , которое задается источником ИК. Здесь TG – период счетных импульсов с выхода генератора G, причем TG << T0.
В этом случае ЦК переключается в состояние логической «1», фиксируя тем самым факт нулевого значения входной координаты.
Учитывая, что при t 1 ≠ t 2 соблюдается условие N 0 > N min , цифровой компаратор ЦК сохраняет на выходе логический «0», запрещающий реверс ТП. Периодический запуск ОВ1 (рис. 1, г) дублирует перенос числа N 0 в RG .
Если ДНТ вновь переходит в статический режим (рис. 2, а), то число в счетчике достигает уровня N 0 (рис. 2, в). Под действием импульса с выхода ОВ2 (рис. 2, в) данные переносятся в RG , а компаратор ЦК формирует сигнал логического «0» (рис. 2, г). При этом счет прекращается, так как состояние N 0 в СТ обеспечивает статический «0» на выходе Л2, блокируя прохождение счетных импульсов через Л1 с выхода G на счетный С- вход счетчика СТ .
Основные преимущества аналого-цифрового ДНТ сводятся к следующему. Он является системой с двойным интегрированием, что повышает степень помехоустойчивости ДНТ как к внешним, так и внутренним помехам (первый канал интегрирования – интегратор И, второй «интегратор» – счетчик СТ ). Повышенная точность ДНТ обусловлена цифровым алгоритмом фиксации значения N min , что позволяет увеличить быстродействие процесса обнаружения «нулевого тока» в контролируемой цепи. Сохранение статического состояния счетной схемы в периоды срыва автоколебательного процесса во входном контуре датчика уменьшает вероятность самопроизвольного перехода цифрового компаратора ЦК в состояние «1» под действием внешних помех, а также снижает уровень внутренних помех в ДНТ от РП, который тот генерирует, например, через каналы источника электропитания, работая в режиме автоколебаний.
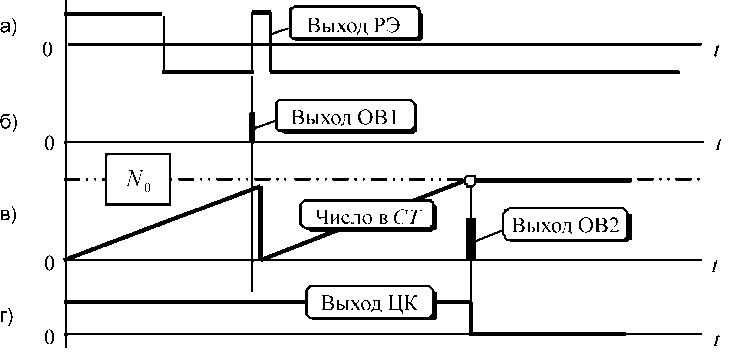
Рис. 2. Временные диаграммы сигналов интегрирующего аналого-цифрового датчика нулевого тока при срыве автоколебаний в развертывающем преобразователе
Преобразовательная техника
Кроме того, дискретно-цифровая часть ДНТ, в которую целесообразно включить также РЭ (см. рис. 1, а), достаточно просто реализуется на программируемом контроллере ПК. Интегрирующий канал ДНТ в большинстве практических случаев целесообразно выполнять на аналоговой основе, так как цифровое интегрирование не приводит к повышению точности ДНТ, а лишь неоправданно увеличивает объем программной части устройства.
Список литературы Интегрирующий аналого-цифровой датчик нулевого тока
- Осипов, О.И. Промышленные помехи и способы их подавления в вентильных электроприводах постоянного тока/О.И. Осипов, Ю.С. Усынин. -М.: Энергия, 1979. -80 с.
- Чернов, Е.А. Комплектные электроприводы станков с ЧПУ: справочное пособие/Е.А. Чернов, В.П. Кузьмин. -Горький: Волго-Вят. кн. изд-во, 1989. -320 с.
- Цытович, Л.И. Реверсивный тиристорный преобразователь для систем управления с питанием от сети с нестационарными параметрами/Л.И. Цытович, Р.М. Рахматулин, М.М. Дудкин, А.В. Качалов//Практическая силовая электроника. -2009. -№ 2 (34). -С. 35-41.
- Качалов, А.В. Интегрирующие устройства синхронизации для систем импульсно-фазового управления вентильными преобразователями/А.В. Качалов, Л.И. Цытович, М.М. Дудкин//Практическая силовая электроника. -2010. -№ 1 (37). -С. 42-51.
- Интегрирующие развертывающие преобразователи с повышенной температурной стабильностью характеристик/Л.И. Цытович, М.М. Дудкин, А.В. Качалов и др.//Приборы и системы. Управление, контроль, диагностика. -2010. -№ 10. -С. 38-43.
- Пат. 2390906 РФ, МПК7 Н 02 М 1/08, G 06 G 7/12. Датчик нулевого тока/Л.И. Цытович, М.М. Дудкин, А.В. Качалов, Р.М. Рахматулин. -№ 2009114056/09; заявл. 13.04.09; опубл. 27.05.10, Бюл. № 15.
