Интеллектуальная робототехника. Ч. 1: креативный когнитивный образовательный процесс - синергетический эффект альянса сотрудничества "колледж - университет - компания - рынок"

Автор: Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2016 года.
Бесплатный доступ
Кратко обсуждаются основы методологии (up - down - up) автора разработки и примеры ИТ образовательного процесса в интеллектуальной робототехнике.
Ит проектирования, интеллектуальная робототехника, креативные образовательные процессы, альянс сотрудничества
Короткий адрес: https://sciup.org/14123268
IDR: 14123268
Intelligent robotics. Pt. 1: creative cognitive education process design - synergetic effects developed through "college - university - company - market" cooperation
The background of design methodology (up - down - up) and examples of education processes IT in intelligent robotics briefly is discussed.
Текст научной статьи Интеллектуальная робототехника. Ч. 1: креативный когнитивный образовательный процесс - синергетический эффект альянса сотрудничества "колледж - университет - компания - рынок"
Введение в РФ преподавания и чтения курса лекций «Робототехника» в общеобразовательной школе и колледже, а также расширение занимательных дополнительных внеклассных занятий по конструированию и увеличение олимпиад по робототехнике без подготовленной научно-технической базы привело к социальному перекосу в качестве преподавания и подготовке квалифицированных специалистов. Такой эффект объясняется отсутствием квалифицированных преподавателей-специалистов и соответствующего материально – технического базиса, что приводит к искажению смыслового содержания процесса моделирования, проектирования и конструирования робототехнических изделий у школьников. Такой же процесс наблюдается и в технических университетах.
Замена процесса обучения «геймизацией» и «виртуальной действительностью» без реального моделирования в такой междисциплинарной области как робототехника имеет печальные последствия и привело к существенному снижению умственной активности у детей [1]. Попытки исправить сложившуюся ситуацию приведены в [2-4].
Отсутствие продуманной и научно обоснованной отечественной программно-аппаратной платформы для целенаправленного формирования квалифицированных инженерно-технических работников приводит к копированию разработок 90-х годов прошлого столетия и сознательному сведению данного процесса к формальному образованию вакуума в подготовке необходимых на данном этапе экономического кризиса квалифицированных специалистов для развития промышленности и НИР.
Наступивший в 90-е годы разрыв связи университетов с промышленными предприятиями, с одной стороны, и непонимание университетов потребности промышленности в кадрах при наборе студентов на технические дисциплины, с другой стороны, привел к разрушению накопленного опыта и потери квалифицированных преподавателей, имеющих опыт работы в промышленной автоматизации производственных процессов и инновационных НИР. За последние годы это стало особенно ощутимо с развитием нанотехнологий и внедрения в робототехнические комплексы микро- и нанороботов.
В последнем случае, в связи со скачкообразным изменением идеологии построения процессов взаимодействия человека-оператора с роботом на основе нейроинтерфейсов, потребовалось в 2000 г. пересмотреть весь процесс подготовки кадров на основе проекта DARPA ( The Defense Advanced Research Projects Agency ) в рамках финансирования институтов НАТО [5].
В данной работе излагается опыт автора разработки и чтения лекций по курсу «Интеллектуальная робототехника» в Японии ( University of Electro-Communications, Tokyo, Yamaha Motor Co., Iwata, College, Hamamatsu ), Италии ( Milan University, Milano, ST Microelectronics, Agata Brianza, College, Crema ) и США ( CA University, San Diego ), МИРЭА (базовая кафедра ИФТП (ИПУ) АН СССР) и ГБОУ МО «Дубна» на протяжении последних 40 лет.
В качестве примера рассмотрена ИТ проектирования встраиваемых интеллектуальных когнитивных самоорганизующихся регуляторов в автономных и коллективах , взаимодействующих за счет обмена знаниями (в общем случае с человеком - оператором) роботов (активных агентов) на базе персонального интеллектуального тренажера. Выявлен синергетический эффект от целенаправленного взаимодействия в системе «колледж - университет - компания - рынок», возникающий при разработке интеллектуальной собственности на наукоемкие ИТ как коммерчески привлекательных интеллектуальных продуктов.
Модели робототехники и интеллектуальное когнитивное управление
Хронологически интенсивное развитие промышленной робототехники с 1980-х создало возможности разработки роботов для непромышленной сферы типа: медицина, сфера обслуживания, развлекательные роботы-игрушки, роботы для образовательных процессов, для обслуживания пожилых людей, роботы для людей с ограниченными физическими и умственными способностями, роботы для МЧС и медицины катастроф и т.д. Отличительной особенностью развития данного направления в робототехнике является появление новых видов нелинейного движения, координационного управления подсистемами с не доопределенными параметрами и необходимость развития новых видов интеллектуальных систем управления (ИСУ) для реализации рассматриваемого движения в условиях неопределенности, информационного риска и нештатных ситуаций.
Модели робототехники
Робототехника рассматривается с точки зрения теории управления как «мехатроника» («механика + электроника») аппаратной поддержки (HardWare) робота (объект управления), погруженная в структуру интеллектуальной системы управления (ИСУ). Поэтому сам робот является неотъемлемой частью ИСУ.
На рис. 1 приведена обобщенная структура когнитивной ИСУ .

Рис. 1. Структура интеллектуальной когнитивной системы управления (объект управления – робот)
Когнитивная ИСУ, через соответствующую базу знаний, реализует аппаратной частью робота заданную форму движения или технологическую операцию с учетом человеческого фактора или непредвиденных ситуаций управления.
В основе таких платформ ИТ проектирования лежит технология интеллектуальных вычислений и соответствующие оптимизаторы баз знаний (ОБЗ) на мягких, когнитивных, дробных и квантовых вычислениях [6-8]. В [9, 10] приведена хронология развития робототехники на основе опыта работы автора с 1967 по 2016 гг.
В зависимости от размеров аппаратной части робота различают макро-робототехнику, миниробототехнику и нано-робототехнику.
Примеры возможных реализаций аппаратной частью макро-роботами [8] приведены на рис. 2-5.
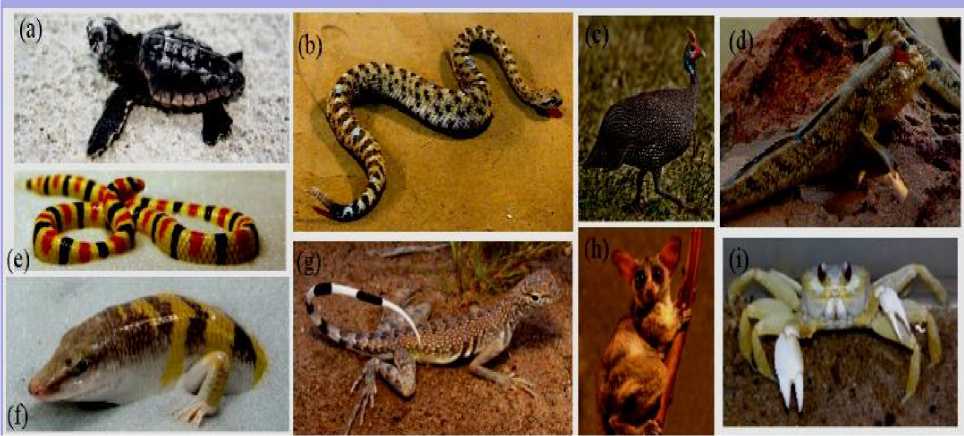
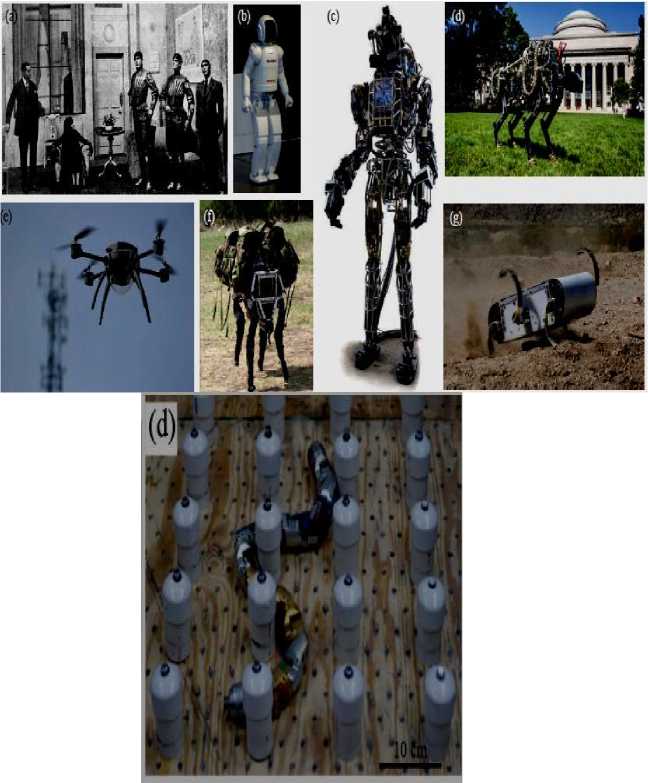
Рис. 2. Биоинспирированные виды движения и их аппаратная реализация роботами
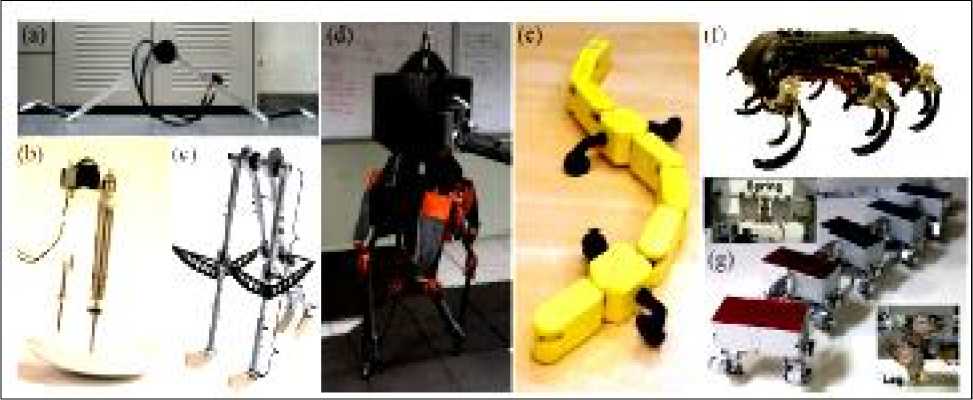
Рис. 3. Автономные роботы для перемещения по твердой поверхности
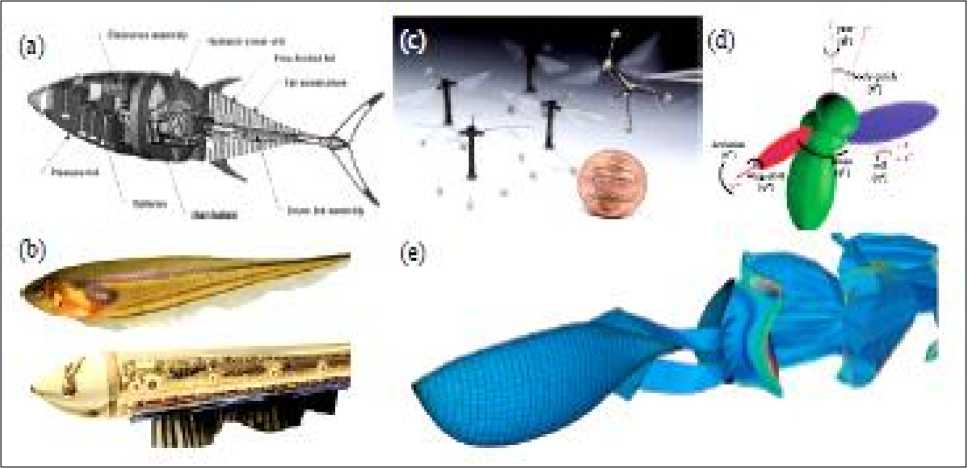
Рис. 4. Роботы для перемещения в жидкой среде
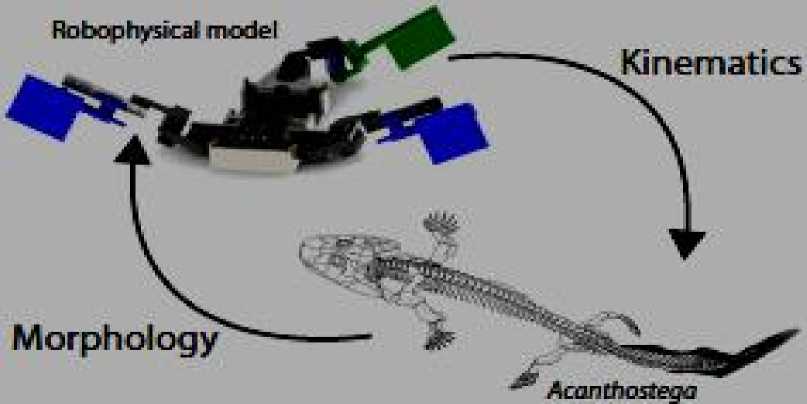
Рис. 5. Методология разработки биоинспирированных роботов
В зависимости от вида среды функционирования проектируется аппаратная часть робота – ме-хатроника и с помощью соответствующей системы управления осуществляется перемещение робота по заданной поверхности или внутри среды, используя пространственно-временную логику.
Динамика движения и функциональная способность робота, в зависимости от типа и среды функционирования, имитирует поведение заданного биообъекта управления, и подчиняется определенным законам классической механики и термодинамики.
Приведенные на рис. 2-5 роботы используют традиционные системы управления, движение самого объекта управления описывается в рамках классической механики, и имеют предельные аппаратные возможности [6-8, 10, 11].
Переход в проектировании от макро – к микророботам связан с процессом миниатюризации типа микромашин и существенно меняет технологию изготовления микродеталей микроробота.
На рис. 6 представлена модель аэромикроробота [12].
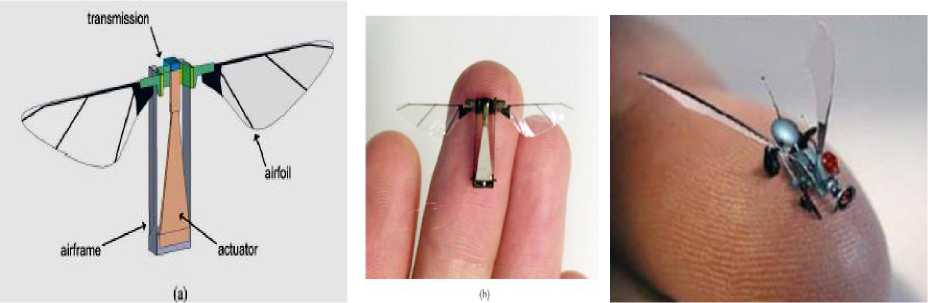
Рис. 6. Модель аэромикроробота.
Переход к описанию моделей нанороботов требует смены платформы физического описания в виде перехода от микро- к наномиру на основе законов квантовой релятивистской механики [13, 14].
На рис. 7 представлена обобщенная структура построения моделей и управления нанороботами [15].
Quantum Laws
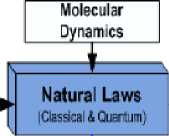
Design Philosophy and Logic
Classical Dynamics [
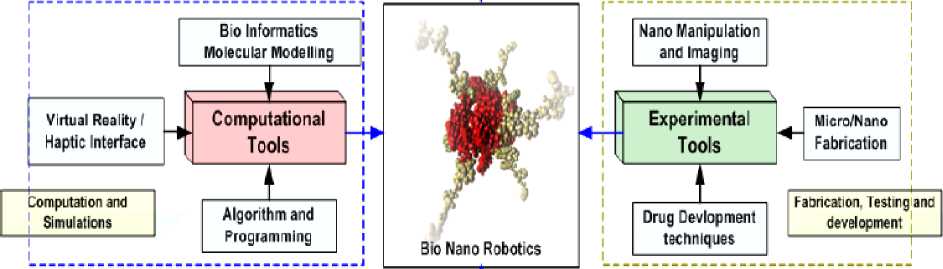
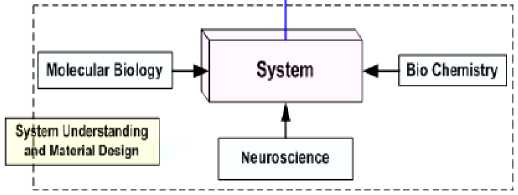
Рис. 7. Обобщенная структура построения моделей и управления нанороботами
Соответственно изменения аппаратной части нанороботов рассматриваются как предельный физический и информационный переход от макро – к микромиру и приводят к развитию биоинспириро-ванных самоорганизующихся моделей исполнительных устройств типа захватывающих устройств, редукторов, передающих устройств, шестеренок и т.п.
На рис. 8 приведены примеры нанороботов и исполнительных устройств нанороботов различного применения [16].
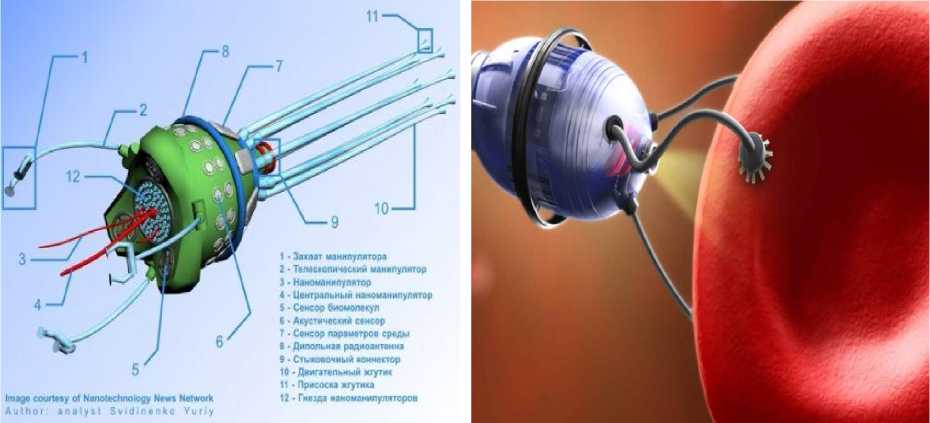


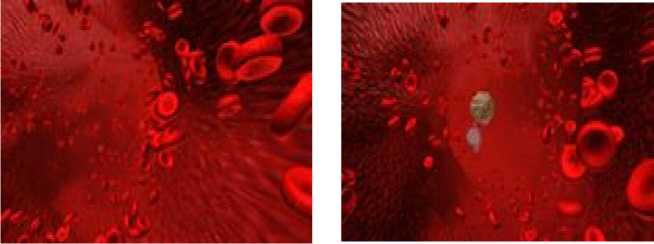
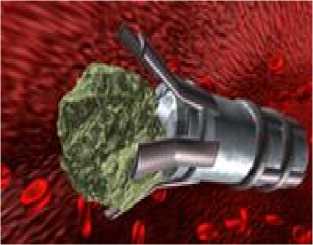
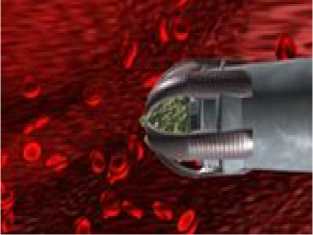


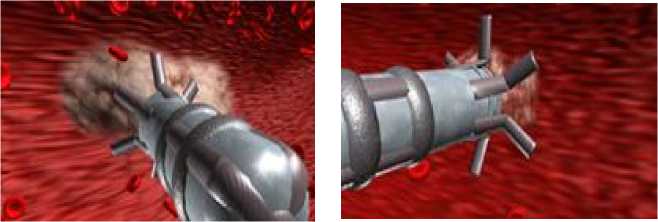

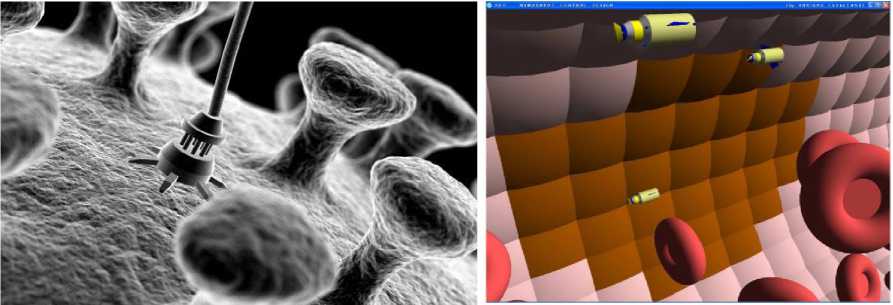
Рис. 8. Нанороботы – манипуляторы медицинского назначения
На рис. 9 представлены возможные модели исполнительных биоинспированных устройств нанороботов [16].
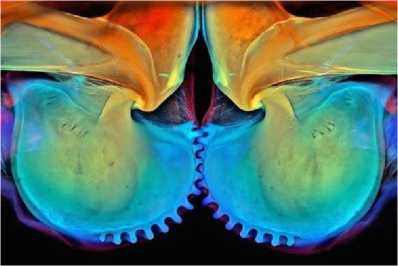
(а)
Рис. 9. Сустав прыгательной ноги цикады (а) – пример использования шестеренок в природе; и биоинспирированная шестеренка (б)
(б)
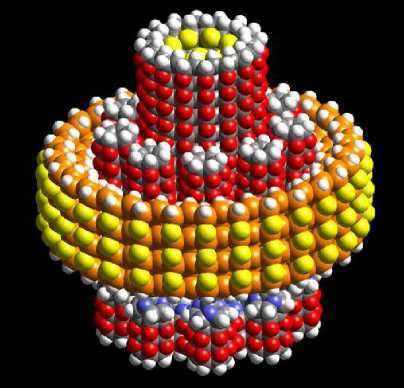
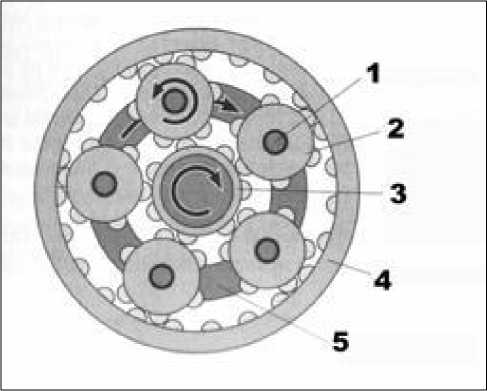
Рис. 10. Схема устройства планетарного редуктора: 1– Подшипник планетарной передачи, 2– Планетарная передача, 3– Солнечная передача, 4– Кольцевая наружная передача, 5– Несущее кольцо планетарных передач
Поэтому рассмотрены новые проблемы проектирования мини- и нано-роботов, описание движения которых требует привлечения законов термодинамики и квантовой механики. Переход от макророботов к мини- и нано-роботам аналогично переходу от классической механики к квантовой механики и требует проверки корректности описания соответствующих моделей. Методы квантовой релятивистской информатики [13] позволяют разрабатывать корректные модели мини- и нанороботов, используя методологию робастного интеллектуального управления для компенсации ошибки аппроксимации.
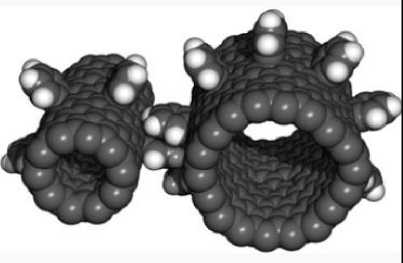
На рис. 11 приведена квантовая модель нано-робота, способного перемещаться в молекулярных мембранах на основе самоорганизующейся ИСУ [17, 18].
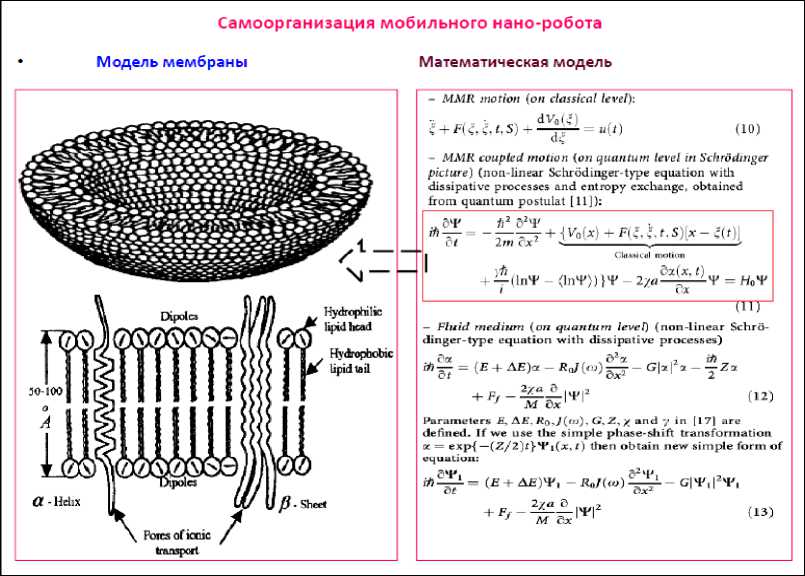
Рис. 11. Нано-робот на основе самоорганизующейся ИСУ
Примеры роботов из разных проблемно-ориентированных областей (man - made robots) и принципы построения структур ИСУ показали взаимную зависимость и влияние на выбор уровня корректных моделей и описания поведения робота. Корректность построения моделей роботов зависит от применения законов физики для описания движения и классификации типов движения, биоинспири-рованных природой. Поэтому для преодоления ограничений осуществляют «интеллектуализацию» системы управления. Так были рассмотрены новые типы макро-роботов, разработанные группой исследователей под руководством автора: робот сервисного обслуживания, одноколесный робот -велосипед, робот-мотоцикл, роботы вертикального перемещения, взаимодействующие в пространстве и времени, и микро-нано-роботы и др. Данные типы роботов реализованы на новых видах ИСУ. Рассмотрим кратко особенности ИТ интеллектуального управления
Интеллектуальное когнитивное управление
Одним из основных назначений и преимуществ эффективного применения ИСУ является возможность гарантированного достижения цели управления с максимальным качеством управления на верхнем уровне и минимальным расходом полезного ресурса системы « объект управления (ОУ) + регулятор » на нижнем (исполнительском) уровне иерархической системы автоматического управления. На содержательном уровне данная возможность отражает назначение целенаправленной деятельности ИСУ в общем случае непредвиденных ситуаций управления.
При этом эффективность применения ИСУ зависит от уровня интеллектуальности разработанной системы (формы, вида и глубинного представления знаний). Важную роль при формировании уровня интеллектуальности САУ играет выбор используемого инструментария технологии ИВ для проектирования соответствующей базы знаний (БЗ) при заданной цели управления.
Отметим особенности выбора и применения на практике технологии и методов ИВ.
Особенности технологии ИВ и принципы ИСУ . Из многочисленных моделей ИВ выбраны технологии мягких, дробных и квантовых вычислений, не случайно. Данные инновационные технологии вычислений составляют программно-алгоритмическую платформу для ИТ проектирования самоорганизующихся ИСУ, способных функционировать и гарантировать достижение цели управления в условиях непредвиденных (нештатных) ситуаций и информационного риска с требуемым уровнем робастности. Именно задача разработки самоорганизующихся ИСУ слабо структурированными объектами управления (ОУ), способных функционировать и гарантировать достижение цели управления в условиях непредвиденных (нештатных) ситуаций и информационного риска, является наиболее актуальной (и трудно решаемой) в теории и систем управления. Решение такой задачи связано с необходимостью реализации ряда новых (для робастного интеллектуального управления) физических и информационно-термодинамических принципов:
-
- принцип компенсации информационной неполноты описания модели (слабоструктурированных) ОУ выбором соответствующего уровня ИВ;
-
- принцип соответствия алгоритма интеллектуального управления уровню сложности и неполноты представления знаний о внешней среде функционирования ОУ (связь информационной энтропии с мерой алгоритмической сложности Колмогорова);
-
- принцип минимума потерь полезного ресурса (минимум обобщенной энтропии - физический закон оптимального управления) в системе «ОУ + регулятор»;
-
- принцип не разрушения и повышения эффективности нижнего исполнительского уровня системы управления за счет самоорганизации БЗ интеллектуального регулятора;
-
- принцип синергизма извлекаемой скрытой квантовой информации из классических состояний спроектированных процессов управления.
Перечисленные принципы рассмотрены в [6-8, 10] с позиции проектирования робастных интеллектуальных нечетких регуляторов (НР) в структуре системы управления физическим экспериментом.
Базис реализации ИТ проектирования ИСУ и парадоксы ИВ . Выполнение и реализация новых физических (информационно-термодинамических) принципов интеллектуального робастного управления в робототехнике осуществляются на основе решения следующих трех принципиальных проблем.
-
А . В первом случае, в отличие от прямой задачи (описания знаний количественными характеристиками), рассматривается решение обратной задачи теории искусственного интеллекта: извлечение, обработка и формирование знаний из количественных данных эксперимента. В этом случае разрабо-
Сетевое научное издание «Системный анализ в науке и образовании» Выпуск №4, 2016 год танная технология проектирования объективных БЗ на основе оптимизаторов БЗ на мягких (и далее на квантовых вычислениях) исключает субъективизм экспертных оценок, обеспечивает достижение требуемого уровня робастности ИСУ.
Б . Во втором случае рассматривается проблема разработки и физического обоснования математической модели квантового алгоритма управления самоорганизацией знаний для формирования робастных БЗ в реальном времени. В [13] показана роль прямых аналогов физических (квантовых и термодинамических) эффектов в реализации процесса гарантированного достижения качества управления на основе технологии квантовых, мягких и дробных вычислений. При этом основное внимание уделяется описанию и интерпретации качественных особенностей биологически воспроизводимой (так называемой синергетически биоинспирированной) эволюции самоорганизации, основные компоненты которой описываются квантовыми операторами и составляют физическое содержание разработанной модели квантового алгоритма управления процессом самоорганизации. Рассматривается задача робастного управления в непредвиденных ситуациях на основе квантовых стратегий принятия решений в виде программного инструментария квантового нечеткого вывода как частного случая разработанного квантового алгоритма управления самоорганизацией знаний.
-
В . Решение третьей проблемы демонстрирует результаты эффективного применения ИТ проектирования робастных БЗ непосредственно в структуре контуров управления ИСУ. Показаны особенности проектирования робастных БЗ для непредвиденных ситуаций управления и в условиях информационного риска для ИСУ, включающих в свою структуру оптимизаторы БЗ.
Синергизм неточной ( imperfect ) информации и синергетический эффект квантовой самоорганизации БЗ в условиях непредвиденных ситуаций рассмотрен в данном пособии и основан на технологии извлечения скрытой в классических состояниях (неизмеримой в общем виде классическими приборами) квантовой информации (дополнительный информационный ресурс).
В качестве классических состояний рассматриваются законы управления изменениями во времени коэффициентов усиления исполнительных автоматических устройств, которые формируют оптимальную управляющую силу (с минимальными потерями полезного ресурса в системе « ОУ + регулятор »).
Обоснование необходимости данной методологии . Необходимость в появлении данной методологии обусловлена повышенным интересом широкого круга студенческой, инженерной и исследовательской аудитории самых различных специальностей к разработке современных технологий ИВ [19] и их практического применения для повышения эффективности исследуемых или действующих робототехнических объектов и систем управления. Проблема созрела давно и объясняется следующим, установленным за долгий период времени (1970 – 2016гг.), фактом: из-за предметной новизны применения интеллектуальных систем и математической сложности описания многие из результатов носят для инженерной аудитории в основном методологический или теоретический характер. Так, например, выбор оптимального типа и параметров функции принадлежности, проектирование БЗ в теории нечетких систем (нечетких регуляторах) носит до сих пор эвристический характер, что вызывает трудности при исследовании и разработке ИСУ.
Поясним некоторые общие особенности данной проблемы.
-
1 . Как правило, в публикациях отсутствует необходимая (для инженерной аудитории или начинающих исследователей) корректная физическая интерпретация разработанных моделей мягких вычислений и получаемых на их основе результатов. В частности, учебные университетские программы обучения (как в РФ, так и за рубежом) поверхностно освещают (или совсем не включают) перечисленные вопросы.
-
2 . Отмеченный выше факт объясняется наличием неполного описания практического опыта обучения, проектирования и промышленной эксплуатации интеллектуальных систем, а также отсутствием принципиального решения одной из основных задач теории искусственного интеллекта: извлечение, обработка и формирование объективных знаний из количественных данных физических экспериментов или динамического поведения системы.
-
3 . В инженерном программном инструментарии компании MathWorks (МатЛаб) не представлен должным образом раздел проектирования ИСУ и БЗ. В результате, на практике используется по существу инструментарий экспертных систем или элементы технологии мягких вычислений (упро-
- щенные модели генетических алгоритмов и нечеткие нейронные сети типа ANFIS) без обеспечения, например, необходимого уровня робастности и полноты БЗ.
-
4 . В инженерной аудитории, поэтому, часто бытует мнение об «экзотическом» виде других новых типов ИВ, имеющих ограниченное применение в практике системной инженерии.
Разработанная ИТ проектирования позволяет использовать данный дополнительный информационный ресурс для повышения уровня робастности ИСУ. Само свойство робастности определяется как следствие самоорганизации БЗ в НР (нижний исполнительский уровень управления).
Спроектированная робастная БЗ позволяет ОУ гарантированно достичь поставленной цели управления в условиях информационного риска и непредвиденных ситуаций управления.
Синергетический эффект альянса сотрудничества «колледж – университет – компания – рынок» в образовательном процессе
Рассмотренные модели робототехники создавались по принципу альянса сотрудничества специалистов из разных областей науки и техники с различными уровнями профессиональных знаний. Прообразом такого подхода послужил проект разработки робота сервисного обслуживания [9].
С апреля 1992 г. по март 1997 г. разрабатывался в рамках R&D центров промышленных компаний Seiko-Epson, Dynax-Corp., Nitto-Seiko, Murata Mfg . Corp, Ricoh Corp., Sankyo-Seiki and Shimizu Corp . совместно с Токийским университетом ( University of Electro-Communications , Chofu , Tokyo ) проект создания интеллектуального робота сервисного обслуживания ночью высотных офисных зданий как социально значимого продукта с высокой степенью коммерческой привлекательности.
Параллельно была разработана и реализована программа обучения школьников и студентов, и подготовки специалистов высокой квалификации через участие в реальном проекте. Распределение работ осуществлялось через сборку макета школьниками и студентами, моделирование и разработка программного продукта студентами магистрами, дизайн и испытания макета специалистами компаний и студентами. Поскольку при разработке робота были поставлены новые для робототехники задачи, то участие каждого сотрудника регламентировалось совместным выполнением ТЗ, извлечением и приобретением новых знаний из процессов моделирования и разработки ИСУ.
Синергетический эффект альянса сотрудничества проявился в разработке оптимизатора баз знаний на мягких вычислениях, создании алгоритма координационного управления в системе «автономный робот - манипулятор с 7-ю степенями свободы», создания нового алгоритма ускоренного интегрирования дифференциальных уравнений для вычисления функции пригодности в генетическом алгоритме, выполнения новых технологических операций типа «открыть дверь», «выйти в коридор», «найти лифт», «войти в лифт» и др.
Разработанный программный продукт интеллектуального управления является универсальным и применяется в 9-ти коммерческих проектах.
Созданный интеллектуальный тренажер проектирования робототехники [20] содержит необходимые элементы синергетического эффекта и позволяет ускорить проектирование новых видов робототехнических изделий.
Заключение
Создание новых видов интеллектуальной робототехники сопровождается двумя параллельными путями: «сверху - вниз ( up - down )», исходя из потребностей рынка интеллектуальных продуктов, и «снизу - вверх ( down - up )», исходя из потребностей подготовки кадров и выполнения проектов с минимальным риском и затрат. Синергетический эффект от взаимодействия указанных направлений позволяет создавать новые виды интеллектуальной когнитивной робототехники на основе разработанного интеллектуального тренажера.
Список литературы Интеллектуальная робототехника. Ч. 1: креативный когнитивный образовательный процесс - синергетический эффект альянса сотрудничества "колледж - университет - компания - рынок"
- The human machine interface as an emerging risk // European Agency for Safety and Health at Work - 2006. (-13: 978-92-9191-300-8 ).
- DOI: 10.2802/21813 ISBN: 978-92-9191-300-8
- Chaudhary V., Agrawal V., Sureka A. An experimental study on the learning outcome of teaching elementary level children using Legmo mindstorms EV3 robotics education kit // arXiv:1610.09610v1 [cs.CY], 30 Oct 2016.
- Yu J., Han Sh., Rus D. A portable, 3D-printing enabled multi-vehicle platform for robotics research and education // arXiv:1609.04745v1 [cs.RO], 15 Sep 2016.
- Davison D., Schindler L. Reidsma D. Physical extracurricular activities in educational child-robot interaction // arXiv:1606.02736v1 [cs.RO], 8 Jun 2016.
- Miranda R. A., Casebeer W. D., Hein A. V. et all. DARPA-funded efforts in the development of novel brain-computer interface technologies // J. Neurosci. Methods. - 2015. - Vol. 244. - Pp. 52 - 67.
