Интеллектуальная робототехника. Ч. 2: социо-экономико-техническая платформа когнитивного образовательного процесса

Автор: Ульянов Сергей Викторович, Решетников Андрей Геннадьевич, Тятюшкина Ольга Юрьевна
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2016 года.
Бесплатный доступ
Рассматриваются объективно необходимые и возможные социотехнические и социоэкономические условия для разработки научно-методологического, программно-алгоритмического и технического базиса в области разработки интеллектуальной робототехники.
Робототехника, интеллектуальные системы управления, когнитивное обучение, 3d-моделирование, робастные базы знаний
Короткий адрес: https://sciup.org/14123269
IDR: 14123269
Intelligent robotics. Pt. 2: socio-technical-economic toolkit of cognitive education processes
Necessary and possibly social-technical and social-economic objective conditions for development of scientific - methodological, computational intelligence toolkit and technical basis in the domain of intelligent robotics are described.
Текст научной статьи Интеллектуальная робототехника. Ч. 2: социо-экономико-техническая платформа когнитивного образовательного процесса
INTELLIGENT ROBOTICS Pt. 2:SOCIO-TECHNICAL-ECONOMIC TOOLKIT OF COGNITIVE EDUCATION PROCESSES
Ulyanov Sergey 1 , Reshetnikov Andrey 2 , Tyatyushkina Olga 3
1Doctor of Science in Physics and Mathematics, professor;
Dubna State University,
Institute of system analysis and management;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
2PhD in informatics, senior teacher;
Dubna State University,
Institute of system analysis and management;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
Введение: Эволюция моделей и развитие робототехнических систем – проблема образовательного процесса
Робототехника является одним из передовых и динамично развивающихся синергетических направлений науки и техники, предназначенная функционально обеспечить потребности социальной среды (социума). В частности, хронологически и традиционно робототехника – междисциплинарное направление на стыке многих научных и технических дисциплин, занимающаяся разработкой автоматизированных технических и производственных / непроизводственных систем.
В свою очередь, ИТ проектирования робототехнических сиcтем является важнейшей технической основой интенсификации производства, научных исследований, образовательных процессов, сфер обслуживания и др. Поэтому образовательные процессы в технических университетах РФ были до настоящего времени ориентированы на долгосрочные этапы внедрения такого рода макророботов в автоматизацию технологических процессов, хотя и отставали в период 1990 – 2000 гг. примерно на 60% от мирового стандарта по производству роботов. Но материальнотехническая база проблемно-ориентированных технических университетов позволяла проходить практику, создавать технологии исследования и разработки новых видов робототехнических систем.
Более того, ряд робототехнических систем таких как бортовые роботы вертикального перемещения (размещенные на борту автономного горизонтально перемещающегося робота) для дезактивации АЭС в Чернобыле, тушения пожаров танкеров с нефтью, покраски и очистки поверхностей и стекол высотных зданий, роботы для работы на Марсе, роботы для военнопромышленного комплекса и др., разработанные ранее в СССР и РФ, превосходили мировые аналоги и становились, например, в 1990г. олимпийскими чемпионами на Олимпийских играх роботов [1-3]. При этом по грузоводъёмности и бортовому набору технологического оборудования данный класс роботов входит до настоящего момента в число мировых стандартов.
Ввиду сложности и опасности выполняемых технологических операций, а также необходимости применения координационного управления несколькими подсистемами разработка такого класса роботов потребовала развития систем с искусственным интеллектом (ИИ) (для разработки алгоритмов интеллектуального управления на основе пространственно-временой нечеткой квантовой логики), разработки новых видов мехатроники и пневматических устройств, нового класса нечетких контроллеров, систем визуализации и планирования движения коллектива роботов и др.
Альянс сотрудничества с зарубежными университетами и компаниями усилил интерес на межгосударственном уровне (Япония, Италия, США и РФ) к промышленному освоению такого класса робототехнических систем, обеспечивающих интенсификацию производства и безопасность социально и экономически важных объектов. Такой подход позволил одновременно привлекать студентов и инженеров к инновационным разработкам и создавать предпосылки для создания роботов новых поколений. Именно так и был реализован образовательный процесс [4].
Учебники и учебные программы университетов РФ и переводы зарубежных изданий могли дать выпускнику платформу профессиональной подготовки на период 4-5 лет на этапе развития робототехники в период 1990-2000 гг., так как сама робототехника на этом периоде развития базировалась на законах аналитической механики (типа уранений Лагранжа 2-го рода для описания динамики промышленного робота-манипулятора и др. в общем случае при случайных возмущениях) и исполнительные устройства мехатроники имели промышленную апробацию. Был образован международный канал сотрудничества и обмена информацией между ведущими университетами и компаниями-производителями робототехники.
Поэтому традиционная схема образовательного процесса по принципу «от простого к сложному» позволяла подготавливать специалистов в области робототехники, опираясь на технологически оснащенную и развитую базу проблемно-ориентированных НИИ, и могла удовлетворять потребности промышленного производства. На современном этапе развития робототехники данный принцип имеет ограниченное применение.
Проблемы разработки моделей современной робототехники и трудности формирования инновационного образовательного процесса
Показатели производства, продажи и внедрения робототехнических комплексов свидетельствуют о состоянии и развитии экономики, разработки инновационных технологий повышения производительности промышленных предприятий и удовлетворения потребностей социума.
Одновременно развитие робототехники и прогноз в ее потребности социумом представляет одну из задач социотехнических систем. В этом случае исследуются проблемы эффективного взаимодействия человеко-машинных систем и ставится новая для социума задача сделать, например, робот мобильным помощником человека по типу пользователя мобильным телефоном или компьютером в сети Интернет. В результате имеем эффект прогноза и опережения потребностей социума и формирование новых синергетических эффектов от взаимодействия систем «человек-робот» и «интеллектуальный робот-человек» во всех сферах деятельности человека. При этом доступ к информационному пространству алгоритмов управления социумом роботов позволяет решать ранее алгоритмически неразрешимые задачи и создавать кластеры роботов для формирования необходимого полезного ресурса при ликвидации, например, последствий техногенных катастроф.
При этом возникает ряд задач из смежных областей взаимодействия человека с роботом типа создания дружественных когнитивных интерфейсов, выявление условий психологической совместимости, безопасности человека при взаимодействии с роботом, наделение робота эмоциями, инстинктом, интуицией, организация передачи знаний роботу для принятия автономного или коллективного решения и мн. др.
Но проникновение в робототехнику новых прогрессивных идей и результатов, например, из квантовой теории информации типа телепортации, теории интеллектуальных когнитивных вычислений на основе нейроинтерфейсов для управления исполнительными устройствами, смена программно-аппаратной платформы информатики на элементную базу нанотехнологий и квантовых алгоритмов поиска в неструктурированной БД, квантового программирования и др. существенно опережает образовательные процессы. Если учесть, что упомянутые результаты ИТ усиленно растут, то в результате объективно создается постоянно увеличивающийся разрыв между подготовкой и потребностью в профессиональных специалистах. В этом случае также требуется разработка математических моделей новых видов интеллектальных вычислений типа Kansei / Affordance Computing , Personal Social Computing , Emotion Computing , Human Mobile Computing , Cognitive Computing и др., представляя дополнительные трудности для обучения разработчиков роботов.
На рис. 1 показана сложность и отчасти драматичность ситуации, сложившейся, например, при разработке исчисления Affordance Computing, которое было предложено Гибсоном и вызвало большой поток работ по созданию роботов с наделенными свойствами мироощущения.
Точное определение такого вида исчислений можно дать только на качественном и полуинтуитивном урвоне: исчисление Affordance Computing предназначено для формирования на интуитивном уровне подсознания «предчувствия» у интеллектуального робота о поведении внешней среды и позволяет планировать необходимое взаимодействие робота с пользователем, вызывая у него бессознательные необходимые эмоциии или желание, например, неосознанная ранее потребность приобрести предъявляемый товар.
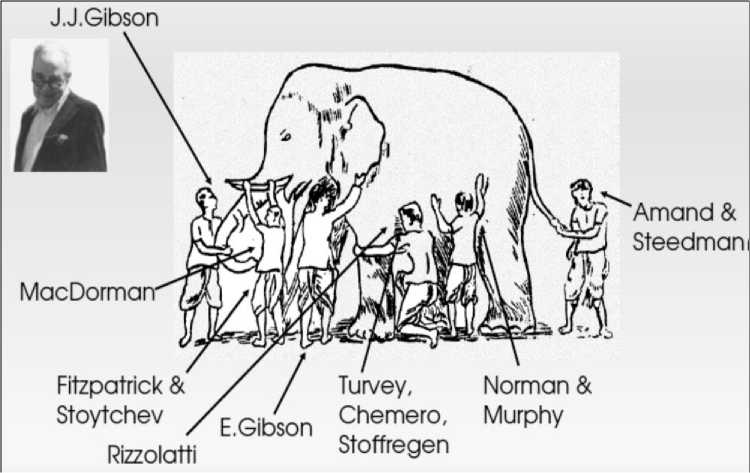
Рис. 1. Иллюстрация сложности разработки концепции исчисления Affordance Computing
Развитие ИТ привело, в свою очередь, к разработке квантового релятивистского Интернета на основе ИТ нанотехнологий и квантовой релятивистской информатики. На базе аппаратной части в виде квантового компьютера и методов квантового программирования возможно создать единую интеллектуальную программно-алгоритмическую платформу для роботов различного класса на основе, например, квантовых слепых облачных вычислений, что позволяет совместно с квантовыми алгоритмами квантовой криптографии решить одновременно задачу защиты информации от несанкционированного вмешательства и т.п.
В результате создается коллектив мобильных роботов, способных работать в самых различных сферах социума и интеллектуальное управление с передачей знаний от робота к роботу позволяет формировать гибкие кластеры для решения задач самоорганизации и саморазвития внутри кластера с наделением роботов форм эмоций, инстинкта и интуиции на основе новых видов интеллектуальных вычислений. Основную роль в решении такой проблемы играет ИТ проектирования различного класса и типа интеллектуальных робототехнических комплексов, способных погружаться в различные ИТ, а также подготовка соответствующих специалистов нового класса.
Следовательно, решая проблему развития интеллектуальной робототехники и «интеллектуализации» существующих робототехнических комплексов одновременно решается задача развития социума и его материально-технической базы.
Именно поэтому в развитых странах робототехника была воздвигнута в рамки национальных проектов и дан приоритет финансирования перспективных исследований [5-16]. К сожалению, в РФ состояние дел даже в развитии макроробототехники оставляет желать лучшего и далеко отстает от мирового уровня как в разработке, так и в инновациях образовательного процесса [6].
В данной части 2 работы (Часть 1 см. в [4]) рассматривается методология ИТ построения и развития современного этапа образовательных процессов на базе научных перспективных разработок ведущих компаний-производителей робототехники и создание условий в университетах РФ для разработки роботов нового поколения, что представляет собой задачу социотехнической системы [17].
Предварительно отметим, что отличительной чертой ИТ разработки и проектирования интеллектуального робота является создание программно-алгоритмической платформы с позиции теории самоорганизующихся интеллектуальных систем управления, позволяющая роботу гарантированно достигать поставленной цели управления с минимальной потерей полезного ресурса и минимумом требуемой исходной информации (см. часть 3 данной работы).
В основе разработанной платформы находятся физический (термодинамический) и информационный законы интеллектуального когнитивного управления оптимального распределения показателей качества управления (устойчивости, управляемости и робастности [18]) динамическим поведением аппаратной (исполнительной) части робота (мехатроники) и соотношение между производимой роботом полезной работы и приобретенной в процессе обучения информацией. В результате извлеченное количество информации позволяет совершить полезную минимально необходимую работу ИСУ для гарантированного достижения роботом поставленной цели управления.
Рассмотрим предварительно состояние рынка робототехники и потребности социотехнической системы в образовательных услугах в области роботехники по заданной проблемно-ориентированной классификации [5-16].
Классификация и направления разработки моделей робототехники
Хронологически условно мировой рынок робототехники подразделяется на сектор промышленной (по отраслям) и сектор сервисной робототехники. При этом роботы сервисного обслуживания подразделяют по применению на профессиональные и персональные. Существует также более тонкая классификация роботов на классы с проблемной ориентацией, социальной направленности, особого применения в условиях нештатных ситуаций и техногенных катастроф, применения в военно-промышленном комплексе, применения в научных исследованиях и мн. др.
При этом роботы, с точки зрения физической реализации, делятся на макро-, микро- и нанороботы, для которых существуют свои сектора применения указанных направлений и реализации на рынке интеллектуальных продуктов. Модель образовательного процесса для указанных классов роботов носит принципиально отличный характер и требует привлечения новых знаний [19-25], ранее не используемые и не развиваемые в макроробототехнике, например, изучение технологий интеллектуальных вычислений, нейроинтерфейсов типа «мозг-исполнительное устройство», когнитивное интеллектуальное управление и др.
Внимание же образовательных процессов даже в соответствующих технических университетах сосредоточено на изучении «примитивных» или упрощенных моделей макророботов типа роботы-манипуляторы и простейшие автономные роботы. Ситуация подобна развитию нанотехнологий, когда образовательный процесс в университете отстает на 15-18 лет от достижений в НИР и производстве.
Поэтому любая классификация носит относительный характер и требует уточнения в зависимости от технологии разработки, применения и назначения робота. Так, например, взаимодействие человека с роботом или с коллективом роботов, а также взаимодействие индивидуальных роботов в коллективе роботов или коллектива людей с коллективом роботов стало предметом тщательного исследования, породило много новых научно-исследовательских задач социотехнического и социоэкономического характера, и относится, в общем случае, к классу проблем интеллектуального управления социотехническими системами [17, 18].
В результате возникло новое направление - когнитивное управление с учетом человеческого фактора в контуре управления. Техногенные катастрофы и катастрофы от возникновения ошибок из-за человеческого фактора подтвердили необходимость развития данного направления и остро поставило вопрос прогнозирования разработок нового класса интеллектуальных робототехнических комплексов и оценки роли человеческого фактора (влияние ошибок или учет когнитивных способностей человека-оператора принимать решение в нештатных ситуациях) при наделении роботов элементами ИИ. Данные проблемы и результаты полностью не отражены в образовательных процессах по макроробототехники и создают серьезное отставание выпускаемых специалистов в знаниях потребностей современного производства и инновационных НИР.
Проведенный еще в 1990 г. и в 2010 г. анализ в [19, 20] предсказал и подтвердил данный вывод и привел к разработке ИТ проектирования когнитивных интеллектуальных робототехнических комплексов на основе новых принципов интеллектуальных вычислений и квантовой самоорганизации знаний. Данный результат был положительно воспринят мировой академической средой на международных конгрессах высшей категории ( IEEE) и утвержден в качестве нового направления развития самоорганизующихся интеллектуальных систем управления (ИСУ) [18, 21-23].
Данный интеллектуальный продукт воспринят на рынке интеллектуальных продуктов как коммерчески привлекательный и была реализована взаимосвязь образовательного процесса в университете с исследованиями компаний [4].
Развитие смежных направлений в физике, математики, биокибернетики, теории и систем управления, нейрофизиологии, теории искусственного интеллекта, информатике и мн. др. существенно повлияло на изменение принципов и формирование научного базиса проектирования и разработки структур современных робототехнических комплексов с учетом взаимодействия с человеком. Поэтому появились новые результаты НИР и технологии проектирования робототехники, которые коренным образом изменили соответствующие принципы разработки и проектирования.
В свою очередь, аппаратная поддержка макро- и микророботов в настоящее время применяет гидравлические, пневматические, акустические, электрические приводы, материалы с различными свойствами, микроэлектронику, различное сочетание данных исполнительных устройств, которое требует для моделирования и расчета разрабатывать модели описания в рамках новой механики -порт-Гамильтоновой механики, в которой каждая подсистема описывается в рамках своей физической модели и затем физически разъединенные модели объединяются в единую модель.
Для описания движения и взаимодействия наноробота с внешней средой (например, движение медицинского наноробота в кровеноносных сосудах) требуется новая модель в виде неэрмитова уравнения Шредингера [24-26], а также квантово-механических и термодинамических ограничений на процессы измерений и точность квантового управления обобщенными координатами наноробота [27-30], аппаратная и алгоритмическая поддержка описывается моделями квантовой релятивистской информатики [26]. Такая база знаний может быть создана на основе взаимодействия университета и компании-разработчика, требует квалифицированных специалистов и находится на стыке многих научных и технических дисциплин [4].
Одновременно такая ситуация объективно приводит к постоянному существенному отставанию образовательного процесса от новых результатов при подготовке востребованных рынком интеллектуального труда квалифицированных кадров, в частности в РФ. Образовательные программы включают современные результаты научных исследований после их апробации примерно через 7-8 лет (из-за отсутствия необходимого научно-технического базиса и необходимых учебных пособий). Ситуация усложняется также тем обстоятельством, что достоверность прогноза удовлетворения потребности и коммерческой привлекательности робототехнических комплеков в социуме связана непосредственно с правильной оценкой рисков внедрения новых технологий и экономической возможностью освоения и реализации новых технологий типа нанотехнологий, квантовой информатики, квантового компьютера и др.
Развитие и коммерциализация робототехнических комплексов также существенно зависит от правильно сбалансированных программ развития смежных областей науки и техники .
Поэтому ведущие университеты осуществляют НИР в интересах ведущих компаний-разработчиков, которые поставляют новое оборудование и финансируют этапы исследований. Такой подход к разработке робототехники (особенно интеллектуальной робототехники) сокращает время разработки новой продукции и существенно экономит расходы на исследования. В результате университеты на собственной интеллектуальной платформе разрабатывают основы новых ИТ проектирования робототехнических комплексов и создают совместно с компанией -разработчиком коммерчески привлекательные наукоемкие и конкурентно способные продукты на собственном секторе рынка интеллектуальных продуктов за счет созданной интеллектуальной собственности [31].
В данной работе рассматриваются механизмы выявления (скрытых) возможностей и необходимые условия создания знаниевой платформы и материально-технической базы разработки нового класса робототехники - интеллектуальной робототехники в условиях конкуренции на мировом рынке [5-12, 32, 33].
В первую очередь обсудим состояние платформ создания робототехники на современном этапе.
Социотехническая и социоэкономическая платформы робототехники
Разнообразие производимых робототехнических комплексов в развитых странах [5-16] и высокая конкуренция на рынке [6, 10-16], а также различие культур и норм этики разработки роботов на
Западе и Востоке [34, 35] потребовали уточнения определения и переоценки критериев разработки, и проблемной ориентации коммерчески привлекательных изделий для оснащения различных видов технологических процессов, НИР и ОКР, а также инновационных образовательных процессов. В частности, практическое развитие микро- и нанотехнологий и появление новых видов программно – алгоритмической и аппаратной поддержки информатики на основе теории ИИ, законов термодинамики, теории квантовых вычислений и алгоритмов, квантовой теории информации привело к пересмотру приоритетных направлений в робототехнике [27, 28].
Так, например, развитие современной робототехники требует одновременного развития нескольких направлений, в том числе и одного из ключевых направлений – ИТ проектирования интеллектуальных систем управления (ИСУ). Это означает интенсивное погружение технологий теории ИИ в современные ИТ проектирования робототехнических комплексов на основе, например, квантового алгоритма самоорганизации знаний, нанотехнологий и квантового управления нанороботами [21-27].
Функциональные особенности тенденции развития робототехники
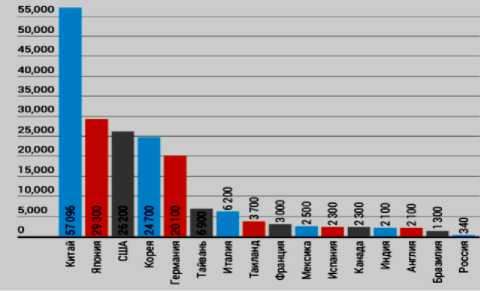
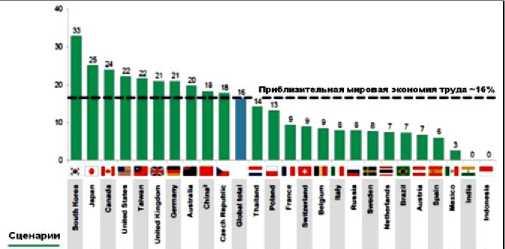
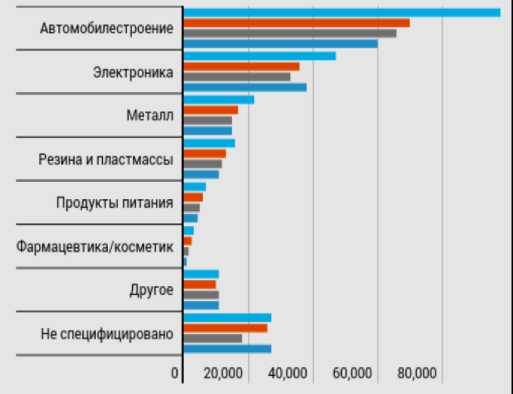
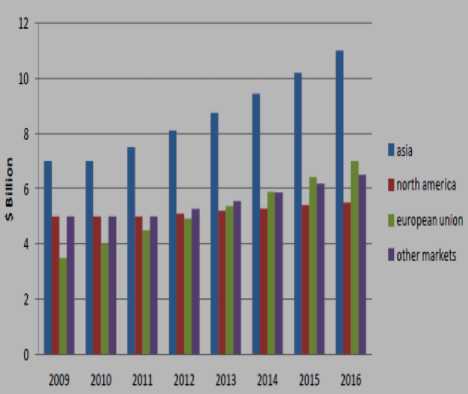
На рис. 2 показана диаграмма распределения продаж роботов и экономия труда по странам мира [6].
(а)
Агрессивным 4740ЯК»е«*М»еЛ2110ЭГ»14821»а11Г С О
Кемермтввиыв И 15 13 ^ И 10 « 4 • S t I е * < 1 6 4 1 114 4 ,00
(б)
(в) (г)
Рис. 2. Диаграмма распределения продаж роботов по странам мира (а), экономия труда (б), распределений продаж роботов по отраслям (в) и прибыль (г) от применения роботов
Эффект от применения роботов по состоянию на 2016 г. в различных проблемноориентированных областях промышленности очевиден, 11 ведущих стран мира повысили эффективность труда более чем на 16%, а Южная Корея, Япония, Канада, США и Тайвань добились повышения производительности труда выше 25%. Одновременно в результате применения результатов различных направлений науки и техники, как отмечалось, возникли новые синергетические «парадоксальные» эффекты [28-30] в теории и системах управления робототехническими комплексами.
Примечание 1. Опыт показал, что при корректном изложении и ясной физической интерпретации результатов в области аналитической и квантовой механики трудностей восприятия и понимания применения полученных знаний в указанных областях у студентов даже со слабой подготовкой, например, при подготовке бакалаврских и магистерских диссертаций не возникает [26 – 30]. Это позволяет студентам создавать новые классы макро- и нанороботов и приобретать необходимые профессиональные навыки. В этом случае доминирующую роль играет квалификация преподавателя.
Согласно [6] в качестве основных причин, сдерживающих развитие робототехники в РФ, были выделены отсутствие квалифицированных специалистов в области робототехники и слабость образовательной инфраструктуры (устаревшие образовательные программы, слабая учебная инфраструктура, отсутствие квалифицированных преподавателей и т.п.).
Среди других важных причин были названы: отсутствие собственных технологических решений, непонимание ситуации на международном и российском рынке робототехники и непонимание спроса на робототехническую продукцию, недостаточность финансирования, небольшой объём рынка венчурных инвестиций внутри РФ, затрудненность экспорта/импорта технологических продуктов и их комплектующих, отсутствие понятных и прозрачных механизмов финансирования исследований, бюрократические препоны, неумение разработчиков анализировать рынок интеллектуальных продуктов, создавать и защищать интеллектуальную собственность [31] и мн. др.
В результате интенсивное развитие указанных направлений и перечисленные причины существенно увеличили разрыв между современными ИТ и образовательными процессами в РФ, что привело к моральному устареванию компентенций, получаемых навыков и знаний, существенному пробелу в квалифицированных специалистах, не востребованности на современном рынке интеллектуального труда результатов российских специалистов и отсутствию конкурентной способности разрабатываемых в РФ наукоемких ИТ [6]. Сложность сложившейся ситуации усиливается оттоком «мозгов» из РФ, способных создавать программно-алгоритмическую поддержку робототехники. Потери подобного рода практически не восполнимы в течении 15-18 лет [6, 17, 31].
Сложность решения указанной проблемы зависит также от уровня экономического развития социотехнической системы, для которой разрабатываются робототехнические комплексы, потребности в производстве и подготовленной образовательной системы, которая удовлетворяет по качеству и количеству выпускаемых специалистов. При этом мировой рынок продаж робототехники ставит в существенную экономическую и научно-техническую зависимость промышленность и образовательную систему РФ по многим отраслям.
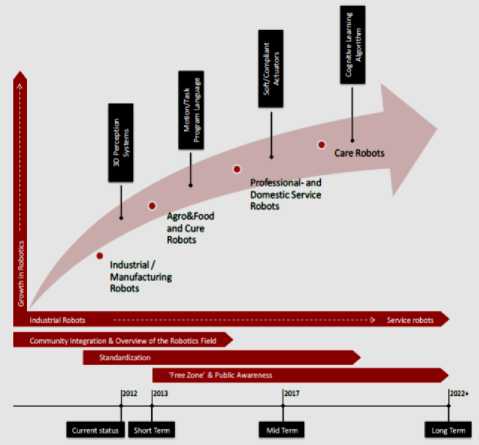
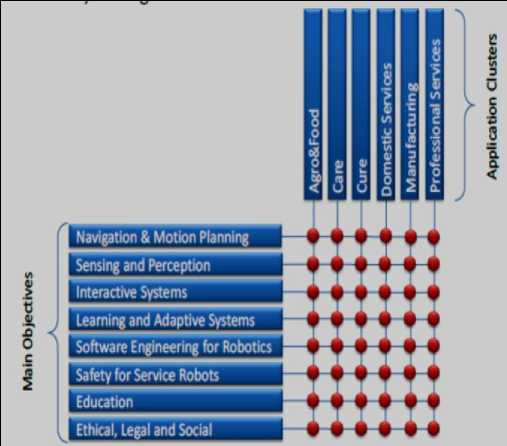
Тенденция развития робототехники и роль технологий интеллектуальных вычислений показаны на рис. 3 и 4.
Отметим некоторые особенности приведенных результатов анализа состояния робототехнике в мире. Из диаграммы на рис. 2 (а) следует, что в РФ продано на октябрь 2016 г. всего 340 – 350 роботов, тогда как в Китае – 57 096, Японии – 29 300, в США 26 200 и в Южной Корее – 24 700. При этом экономия труда (см. рис. 1(б)) в Южной Корее выросла на 33%, в Японии на 25 % и в США на 22 %. Прибыль от внедрения роботов приведена на рис. 2 (г). Приоритетной областью применения роботов остается автомобильная промышленность (см. рис. 2(в)). Роль РФ на мировом рынке ничтожно мала, а инновационные ИТ проектирования и производство роботов просто отсутствуют.
(а)
Рис. 3. Тенденция развития робототехники (а) на технологиях интеллектуальных вычислений (б)
(б)
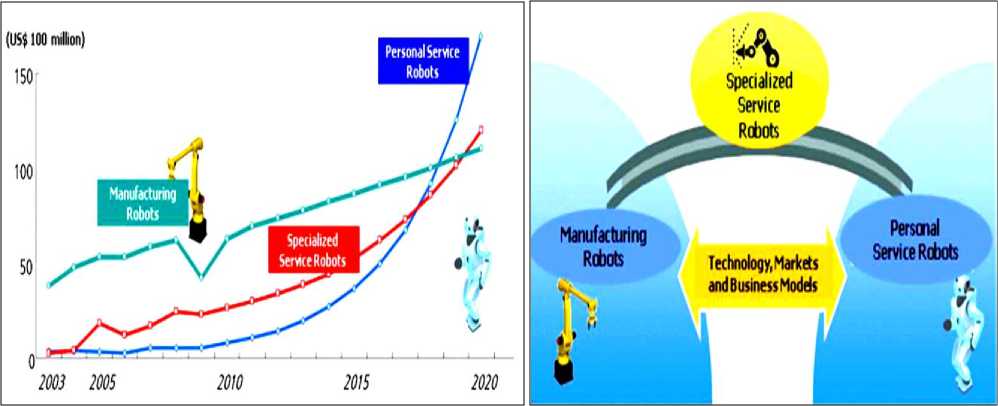
Рис. 4. Тенденция развития и взаимосвязь технологий робототехники [9]
Из графиков рис. 3 и 4 отчетлива видна тенденция перехода от промышленных роботов к роботам сервисного обслуживания с различной степенью социальной ответственности 1 : от бытового обслуживания к медицинским роботам и роботам обслуживания людей с физической или умственной недостаточностью, роботов ухода за детьми, ликвидации последствий техногенных катастроф, извлечение пострадавших людей или оборудования в непредвиденной (нештатной) ситуации и т.п.
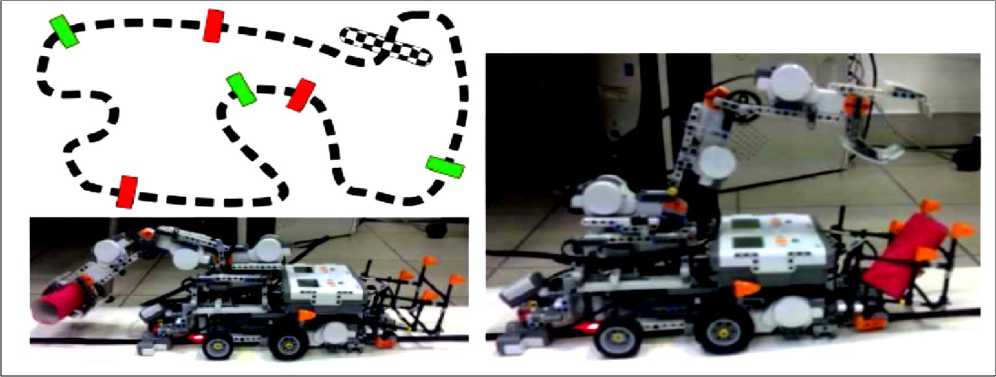
При этом ИТ проектирования промышленных роботов и ИТ проектирования роботов сервисного обслуживания опираются на единую интеллектуальную платформу применения технологий интеллектуальных вычислений и интеллектуального когнитивного управления. Такой подход позволяет создавать гибридные промышленные роботы сервисного обслуживания специального назначения [2, 6, 34-39]. В качестве примера на рис. 5 представлены примеры мобильных промышленных роботов сервисного обслуживания для ликвидации последствий землетрясений или техногенных катастроф в условиях преодоления существенных препятствий [15, 36-38].



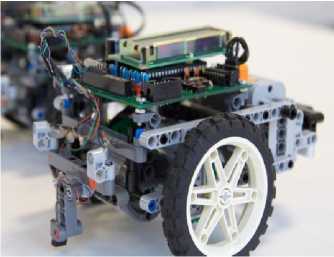
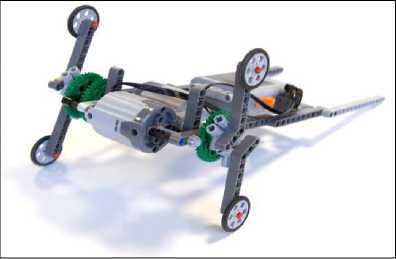
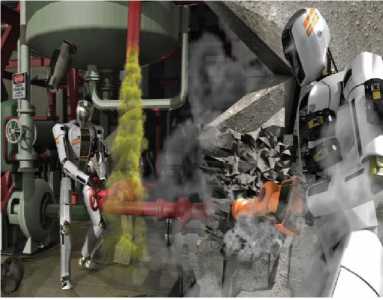
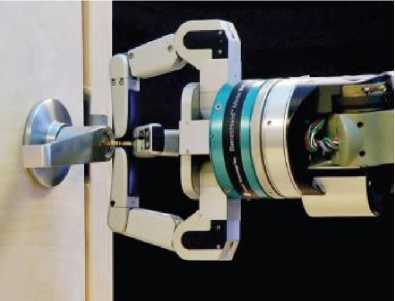
Рис. 5. Примеры мобильных роботов, работающих в условиях нештатных ситуаций
Такого рода роботам сервисного обслуживания приходится выполнять сложные технологические операции как цели управления в условиях неопределенности исходной информации, стремиться минимально расходовать полезный ресурс, формировать координационное управление в коллективе роботов и др. Выполнение поставленной задачи за счет только аппаратной части мехатроники практически ограничено, а выполнение последовательности комбинаций операций часто просто не выполнимо. С такой ситуацией пришлось иметь дело при выполнении задачи дезактивации АЭС после взрыва в Чернобыле и наружных стен жилых помещений в Припяти [1-3].
При этом необходимо было разработать новые структуры роботов вертикального перемещения с переменной структурой для перехода, например, со стены на потолок и наоборот, и которые находились на борту автономного робота [2, 3] и дополнительной технологической оснастки для снятия радиоактивного слоя, сбора радиоактивной пыли с помощью пылесоса специальной конструкции и др. Для таких (и им подобных) роботов необходимо разрабатывать соответствующие модели ИСУ [4]. Интеллектуальное управление и новое аппаратное решение мехатроники позволили завоевать роботу вертикального перемещения олимпийскую медаль на Олимпийских Играх в 1990г. в г. Глазго [1].
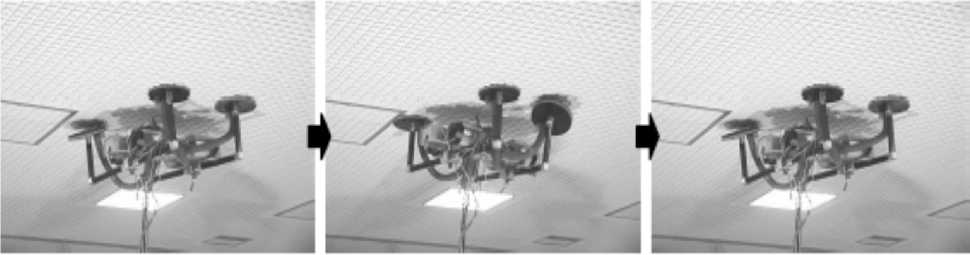
На рис. 6 приведены примеры других моделей роботов вертикального перемещения [39-41].

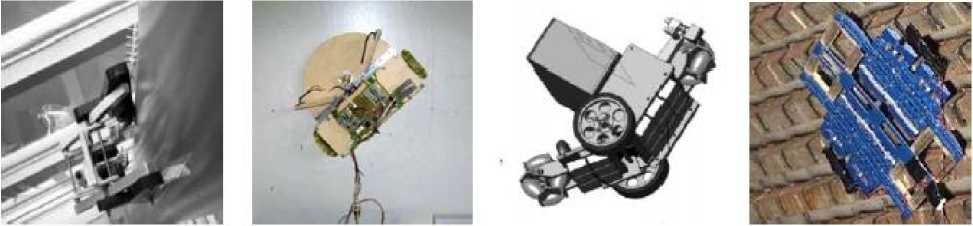

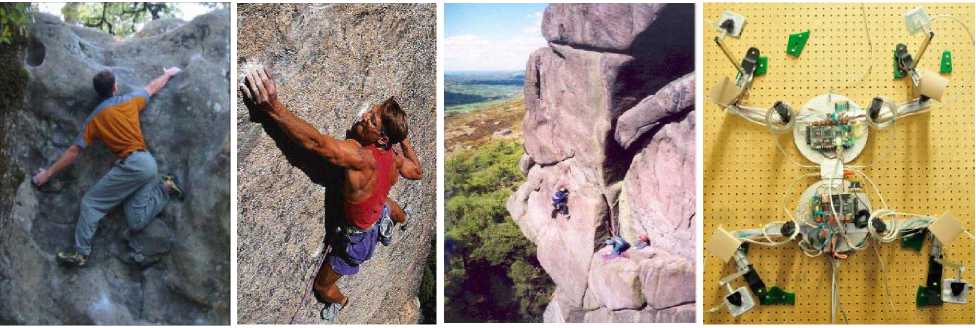
Рис. 6. Примеры проблемно-ориентированных роботов вертикального перемещения
Роботы вертикального перемещения выполняют операции очистки стекол в высотных зданиях, контроль швов в танкерах нефтехранилищ, доставки оборудования на разные высоты с шероховатой поверхностью, контроль высотных зданий, газопроводов и др. Разработка таких моделей роботов требует привлечение новых методов нелинейной механики и разработки новых материалов для сцепления с поверхностью в зависимости от проблемной ориентации применения робота.
На рис. 7 приведены примеры новых видов роботов для премещения по потолку, перемещения антропоморфного робота-скалолаза по стене и доставки роботов вертикального перемещения для очистки стекол с помощью дрона [42-46].

Shand hooks VI R hand looks V7 R hand hooks V16 R hand hooks VIS R hand hooks W2
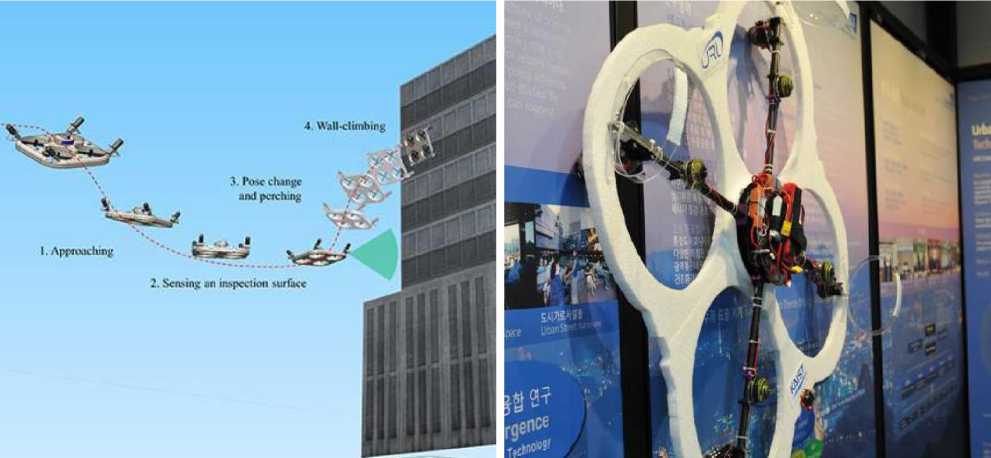
Рис. 7. Примеры роботов вертикального перемещения
Данный класс роботов имеет также большое применение в задачах стоительства больших высотных сооружений, очистки днищ больших судов, безопасных ремонтных работах высоковольтных линий электропередач и др.
Робоэтика: формы взаимодействия человека с роботами сервисного обслуживания
Рассмотрим кратко вопрос робоэтики, возникающий при попытках создать роботов, близких к человеку по внешности, поведению или другим параметрам. Взаимодействие промышленного робота с человеком-оператором в нештатных ситуациях, распространение робототехнических изделий в качестве игрушек или в сферу обслуживания, медицину и др. породило необходимость рассматривать такой процесс с точки зрения поведения социотехнической системы [17, 20] и учитывать влияние различного рода отрицательных психофизиологических факторов на человека-пользователя от взаимодействия с новыми типами роботов с различной эмоциональной окраски. Это особенно ярко выражено при взаимодействии детей с роботами-игрушками и лицами пожилого возраста или с физическими / умственными недостатками. Рассмотрим некоторые особенности социальной этики взаимодействия человека с роботом сервисного обслуживания.
Эффект «зловещей долины ( Bukimi no tani - The uncanny valley)»
Стремление многих компаний-производителей роботов-игрушек выпускать коммерческие игрушки с «устрашающей» или негативной выразительностью лица и внешностью отрицательно сказывается на психофизиологическом и умственном развитии детей. Особенно это явление стало ощутимым при переносе в Японии популярных героев комиксов на роботы-игрушки для детей дошкольного и школьного образования. В 1970 г. японский исследователь Мори [48-52], опираясь на накопленный опыт, описал эмпирический эффект «зловещей долины – Bukimi no tani », который отразил следующий факт: чем больше стараться делать роботов похожими на людей, тем большее отторжение они вызовут.
Для наглядности был описал это явление следующим гипотетическим графиком на рис. 8.
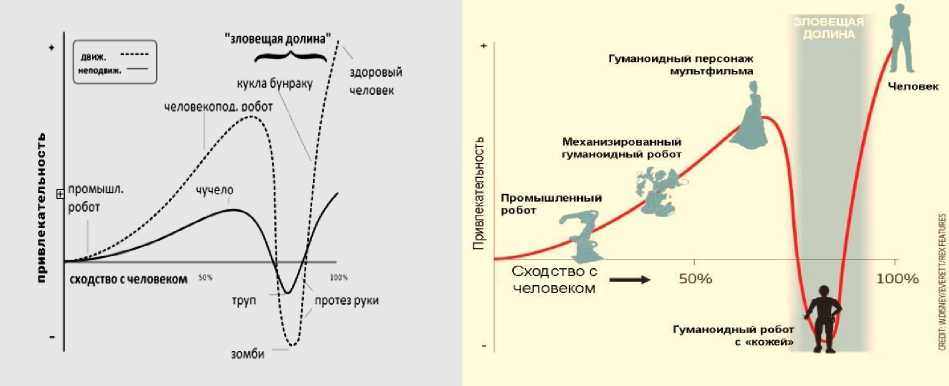
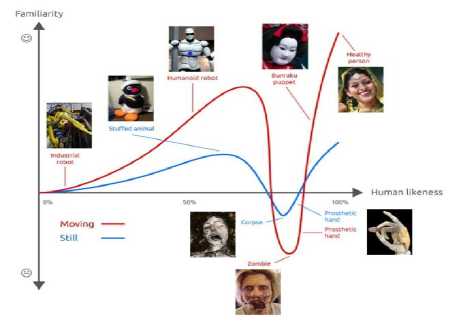

Рис. 8. Иллюстрация эффекта «зловещая долина»
На оси абсцисс рис. 8 «сходство с человеком», на оси ординат – «ощущение близости, привлекательности». Непрерывная линия обозначает неподвижные объекты (на ней отмечены чучело животного, неподвижный ручной протез и труп), пунктир – движущиеся (на нем отмечены промышленный робот, человекоподобный робот, зомби, подвижный ручной протез, кукла традиционного японского театра бунраку и здоровый человек). На графике видно, что плавное нарастание привлекательности по мере того, как нарастает сходство создания с человеком, сменяется резким провалом — «зловещей долиной» (она на графике отмечена фигурной скобкой). Упоминание «трупа» и «зомби» здесь неслучайно: сам Мори считает, что неестественность человекоподобных роботов напоминает человеку о смерти и именно в этом причина «зловещего», незнакомого чувства, например, восприятие «Двухсотлетний человек» ( Columbia Pictures , 1999) на рис. 8.
Эффект эмоционального взаимодействия робота (андроида) с человеком обсуждался многими исследователями [34, 35, 47-52] и мн. др. с разных точек зрения. Применение технологии ИВ при разработке интеллектуальных роботов позволяет избежать отмеченного отрицательного эффекта, контролируя эмоции с помощью когитивного управления фомированием БЗ для соответствующего когнитивного регулятора. В данном случае в процессе проектирования когнитивных регуляторов учитываются факторы компенсации отрицательных эмоций за счет повышения интеллектуальности робота сервисного обслуживания на основе методологии и принципов ИТ Kansei / Affective Engineering [53, 54]. В данной работе обсуждаются необходимые предпосылки и условия для организации когнитивного образовательного процесса, позволяющего разрабатывать и проектировать новый класс робототехнических систем – интеллектуальные роботы.
Пример: Роботы сервисного обслуживания пожилых людей и людей с физи ческими или умственными недостатками
В силу специфики и сложности объекта управления, проектирование и разработка роботов сервисного обслуживания для людей пожилого возраста породило много новых задач как в сфере мехатроники (новые виды безопасных и комфортных захватывающих устройств, сенсоры, видеокамеры, пневматические, гидравлические и др. исполнительные сервомеханизмы, протезирование и др.), так и в разработке новых видов систем управления (управление по обработке изображений, навигация робота, управление роботом манипулятором и автономным роботом с применением нейроинтерфейсов и др.). Одновременно необходимо было пересмотреть взгляды отношения социоума к поддержке жизнеобеспечения инвалидов, людей пожилого возраста и людей с физическими или умственными недостатками.
На рис. 9 приведены результаты оценки повышения возраста работающих по отношению к популяции населения в Японии.
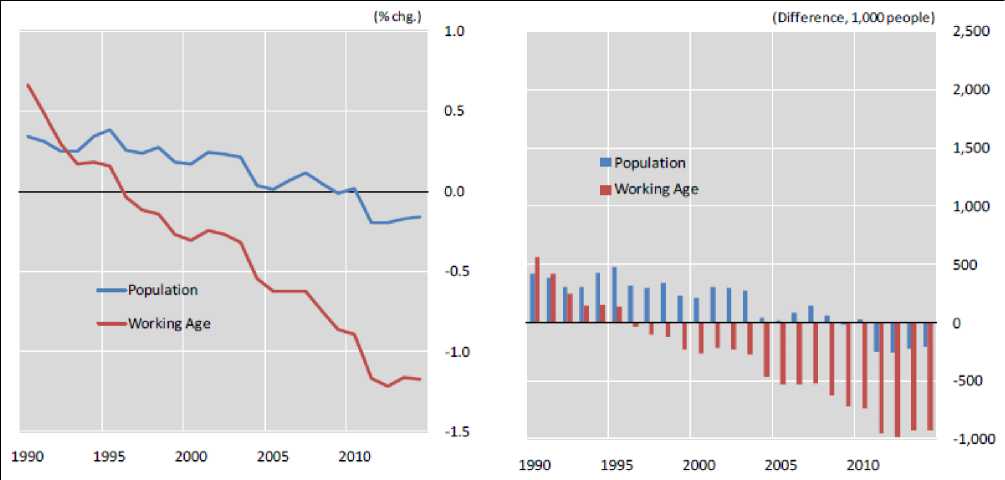
Рис. 9. Показатели увеличения возраста работающих людей в популяции населения Японии
Помимо технических задач создания роботов сервисного обслуживания возникают трудности интерпретации социума социоэкономической поддержки людей пожилого возраста и инвалидов в зависимости от демографии и различий общей культуры отношения к решению данной проблемы, в частности Запада и Востока [34, 35].
Проблема приобрела национальный характер в связи с резким старением населения и отсутствия необходимого притока необходимой производственной рабочей силы. Это стало особенно ощутимо, согласно результатам отчета « Population Statistics Japan 2006, by the National Institute of Population and Social Security Research , Japan » в ряде стран ЕС и Азии. Так, например, к 2012 г. в Японии людей старше 65 лет было около 30,000,000 и прогнозируется, что это число к 2025 г. вырастет еще на 30% и на 40% к 2060 г. Поэтому история и культура национального отношения к пожилым людям в Японии 2 проявились в стремлении создать серию комфортных роботов сервисного обслуживания [34, 35, 47].
На рис. 10 приведены примеры роботов сервисного обслуживания с разными видами систем управления от поддержки настроения и спокойствия у пожилых людей на основе классической системы управления для робота-игрушки и оказания помощи для преодоления препятствий до помощи инвалидам в управлении подвижным роботом-тележкой на основе когнитивного
нейроинтерфейса.




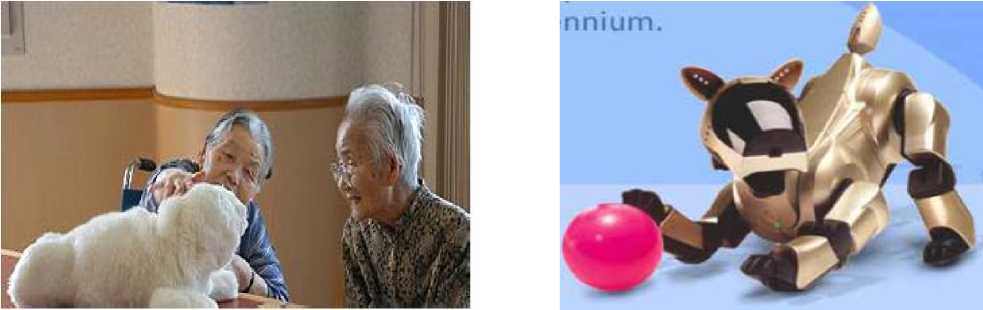

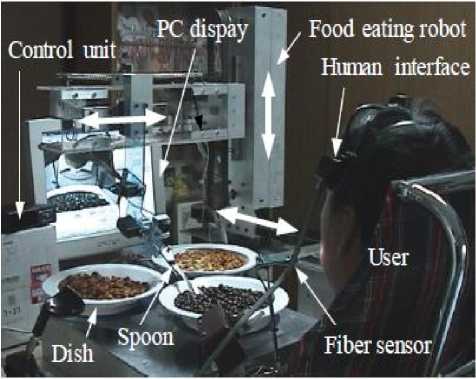
Рис. 10. Примеры роботов сервисного обслуживания
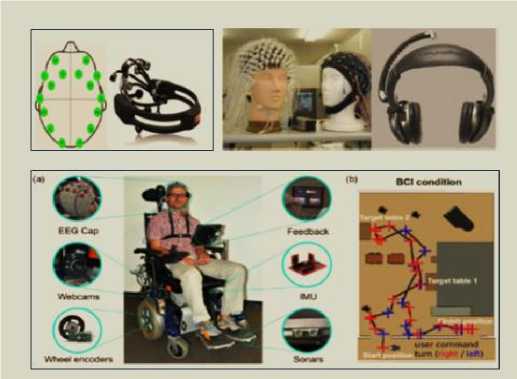
Приведенные примеры указывают на разнообразие и широкую номенклатуру разработанных роботов.
Возникает вопрос: существующая образовательная система в колледже и университете включает современное представление о робототехнике хотя бы на уровне разработки макророботов?
Для объективного ответа на поставленный вопрос предварительно обсудим существующие модели образовательного процесса в робототехнике.
Компьютерное обучение робототехнике в колледже и университете РФ: состояние базиса, концепции и ошибки
К настоящему времени робототехника накопила большое количество разнообразных примеров макророботов, реализующих различные нелинейные виды и формы динамического движения и типы технологических операций.
На рис. 11 приведены дополнительные примеры такого рода разработанных роботов [3-16].
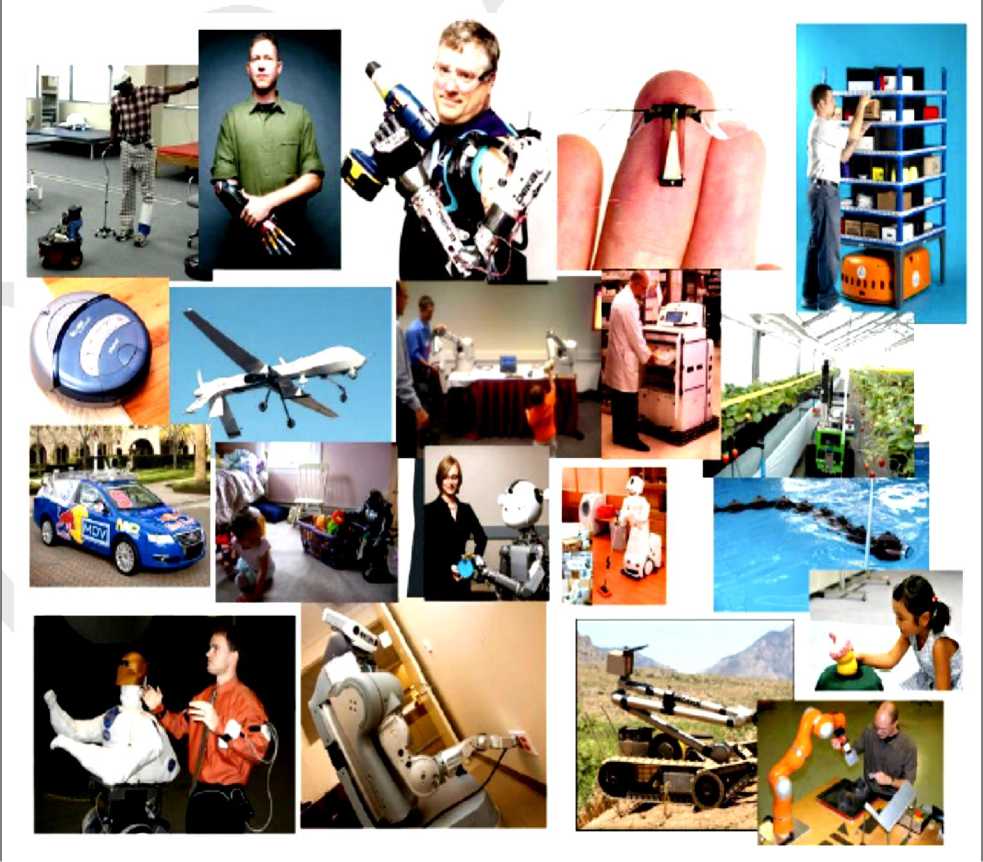
Рис. 11. Примеры разработанных проблемно-ориентированных робототехнических устройств [24]
Характерным для приведенных примеров роботов на рис. 11 является реализация на традиционных системах управления и имеют ограниченные возможности на выполнение поставленной цели управления. При появлении непредвиденных ситуаций управления, внутренних отказов системы измерения, задержки сигнала управления, появления недоопределенных параметров или шумов в канале связи и передачи информации и мн. др. данный класс роботов с применением традиционных класов систем управления не достигает поставленной цели управления. В этом случае необходимо разрабатывать интеллектуальные роботы на основе ИИ, в частности на основе нечетких систем управления и технологии интеллектуальных вычислений (ИВ). Решение проблемы внедрения в робототехнику технологий теории ИИ отмечается как одна из важнейших и требует комплексного подхода [5-16, 55, 56]. В результате осуществляется переход к разработке ИТ проектирования интеллектуальной робототехники на основе новых видов технологии ИВ [18-27].
Примечание 2. Интенсивное развитие промышленной робототехники, в частности в Японии, с 80-х годов прошлого столетия создало возможность разработки роботов для непромышленной сферы типа: медицина, сфера обслуживания, развлекательные роботы – игрушки, роботы для образовательных процессов, роботы для людей с ограниченными физическими и умственными способностями, роботы для МЧС и медицины катастроф и т.д. Отличительной особенностью развития данного направления в робототехнике является появление новых видов нелинейного движения, которые отсутствуют в природе, нового вида координационного управления подсистемами с не доопределенными параметрами и с избыточными степенями свободы, неголономными и не склерономными связями, различными видами неустойчивости по перекрестным связям между обобщенными координатами, скрытыми параметрами в моделях и др. Современные методы аналитической механики и теории управления не дают конструктивных решений указанных задач. В результате появляется необходимость развития новых поколений ИСУ для реализации рассматриваемого движения с компенсацией неопределенностей в моделях роботов и в условиях информационного риска и нештатных ситуаций. Параллельно с данным процессом исследователи вынуждены разрабатывать новые виды ИВ и принципы интеллектуального управления [27, 29]. Особое значение данная проблема приобрела в связи с интенсивным развитием микро- и наноробототехники [28-32]. В основе таких платформ проектирования лежит технология ИВ типа мягких вычислений, когнитивных вычислений, дробных и квантовых вычислений [18-30].
Примечание 3. Из хронологии развития робототехники и на основе 40-летнего отечественного и зарубежного опыта работы одного из соавторов (СВУ) «робототехника» рассматривается как «мехатроника» («механика + электроника») аппаратной поддержки ( HardWare – HW ) робота (объект управления – ОУ), погруженная в структуру ИСУ, которая гарантирует достижение поставленной роботу цели через реализацию заданной формы движения или технологическую операцию. Особое значение в этом случае приобретает разработка соответствующего программно-алгоритмического обеспечения изделий мехатроники для реализации требуемого движения робота в заданной среде функционирования. При этом возникает проблема проверки адекватности математической модели реальной физической модели робота [26].
Примечание 4. Известно, что уровень развития и коммерческая привлекательность прорывных интеллектуальных и оптимальных методов принятия решений в ИСУ находятся в прямой зависимости от типа баз знаний (БЗ), применяемого в процессах извлечения, обработки и формирования знаний, а также от вида интеллектуальной базы программно-аппаратной поддержки (computational intelligence toolkit) процессов извлечения, обработки и формирования знаний. Выполнение требований усовершенствования теории и внедрения инноваций практики систем управления нашло свое отражение, в частности, в развитии новых видов вычислений, например, для решения задач оптимизации, обучения и адаптации на основе технологии ИВ.
Существует значительный разрыв между потребностями промышленности и возможностями современных технических университетов в формировании высококвалифицированной инженерии в области интеллектуальной робототехники. В данной работе описывается конкретная структура и программно – алгоритмическая поддержка интеллектуального робо-тренажера для обучения разработчиков интеллектуальной робототехники (см. Часть 3).
Из многочисленных моделей ИВ для разработки платформы интеллектуального робо-тренажера выбраны технологии мягких, дробных и квантовых вычислений, а также квантового программирования, не случайно. Данные инновационные технологии вычислений составляют основу проектирования робастных самоорганизующихся ИСУ, способных функционировать и гарантировать достижение цели управления в условиях непредвиденных (нештатных) ситуаций и информационного риска [29].
Именно задача разработки самоорганизующихся ИСУ слабо структурированными объектами управления (ОУ), способных функционировать и гарантировать достижение цели управления в условиях непредвиденных (внештатных) ситуаций и информационного риска, является наиболее трудно решаемой в теории и систем управления. Предметом разрабатываемого робо-тренажера является обучение решениям данной задачи по методике [4] и аналога в мировой практике в настоящее время не имеет.
Примечание 5. Решение указанной в Примечании 4 задачи связано с необходимостью реализации ряда новых (для робастного интеллектуального управления) физических и информационнотермодинамических принципов: принцип компенсации информационной неполноты описания модели (слабоструктурированных) ОУ выбором соответствующего уровня ИВ; принцип соответствия алгоритма интеллектуального управления уровню сложности и неполноты представления знаний о внешней среде функционирования ОУ (связь информационной энтропии с мерой алгоритмической сложности Колмогорова); принцип минимума потерь полезного ресурса (минимум обобщенной энтропии – физический закон оптимального управления) в системе «ОУ + регулятор»; принцип минимума исходной информации; принцип не разрушения и повышения эффективности нижнего исполнительского уровня системы управления за счет самоорганизации БЗ интеллектуального регулятора и принцип синергизма извлекаемой скрытой квантовой информации из классических состояний спроектированных процессов управления.
На рис. 12 приведена концептуальная модель интеллектуального робо-тренажера в когнитивном образовательном процессе интеллектуальной робототехнике.

Рис. 12. Концептуальная модель ИТ образовательного процесса в интеллектуальной робототехнике
На рис. 13 приведена диаграмма пользователей интеллектуальным тренажером.

Рис. 13. Структура пользователей интеллектуальным робо-тренажером
Смысловое содержание и функциональная структура интеллектуального тренажера, представленная на рис. 12, имеет принципиальное отличие от ранее разрабатываемых подходов к структурному проектированию моделей интеллектуального управления, и представляет новое направление в области исследования инновационных ИТ типа квантовых ИТ проектирования нанороботов, разработки, проектирования и применения робастных самоорганизующихся ИСУ и др. [20 – 30].
Примечание 6. Выделим некоторые особенности разработанного подхода к структурному проектированию моделей интеллектуального управления и его отличия от известных работ по разработке ИСУ. Важным для системной инженерии результатом применения ИТ проектирования ИСУ является показанная возможность реализации квантовых алгоритмов и квантовых вычислений на типовом (а не на квантовом) процессоре в стандартной конфигурации аппаратной поддержки роботов – манипуляторов и автономных роботов [29]. В этом случае применение квантового алгоритма самоорганизации баз знаний позволяет в реальном времени достичь цели управления в непредвиденных ситуациях за счет повышения робастности ИСУ в проблемно-ориентированной области. Вычислительным базисом отмеченных направлений разработок является технология квантовых мягких вычислений [29]. Поэтому из многочисленных моделей ИВ в качестве примера интеллектуальной платформы программно-алгоритмического обеспечения робо-тренажера представлены прикладные разработки технологий мягких, дробных и квантовых вычислений.
Отмеченная актуальность и широта аудитории пользователей технологиями ИВ объясняется также следующим обстоятельством: одной из предметных областей применения технологий ИВ является разработка прорывных интеллектуальных наукоемких ИТ на основе новых информационных платформ и физических принципов [27-29, 57-63].
Примечание 7. Несмотря на огромные усилия и координацию эффективности исследований данного направления [64-68], анализ состояния этого процесса России демонстрирует серьезное отставание этого направления от мирового уровня [4, 6, 65-68]. Уровень роботизации в РФ примерно в 70 раз ниже среднего мирового уровня [6, 66, 68], что показывает отсутствие как технологий, так и катастрофически недостаточное число специалистов, способных компенсировать это отставание.
Исследователи предлагают появление новых кодексов, законов, нормативов и сертификации образовательных программ для специальностей и профессий, ориентированных на робототехнику и подготовку новых высококвалифицированных кадров. В частности, отраженное в [69] современное реальное состояние и результаты анализа образовательных программ кружков, факультативов, семинаров средних классов, свидетельствует, что в лучшем случае образовательный процесс, связанный с робототехникой, в основном включается в программу средних классов, не охватывающей преемственность студенческого и промышленного опыта. Более того, использование разнородного образовательного оборудования и короткий период обучения (5-8 классы) свидетельствуют о частичной ограниченности и несвязности образовательных программ со смежными дисциплинами, такими как информатика, математика, физика и т.д., что, в конечном счете, влияет на качество оказания образовательных услуг. Причем, с учениками старше 15 лет работают только 6% всех образовательных организаций такого класса.
Примечание 8 . Разнообразие разработанных за последнее десятилетие робототехнических комплексов различной проблемной ориентации на основе различных принципов проектирования, аппаратной и программно-алгоритмической поддержки даже на уровне макро-робототехники (см. рис. 11) привело к злоупотреблению разработок разнообразных методик обучения, особенно для детей школьного и дошкольного образования. При этом качество методологии обучения существенно зависит от профессиональной подготовки преподавателя, что изначально ставит многие методики под сомнение, поскольку часто критерием качества результат обучения служит эмоциональная оценка интереса обучаемого и умение собрать примитивный робот с точки зрения преподавателя.
В данной работе используется нейроинтерфейс для регистрации электоэнцефалограммы (ЭЭГ) и определения зон в коре головного мозга, формирующих степени заинтересованности обучаемого в образовательном процессе, и отвечающие за использование его одновременно как инструментарий управления роботом без системы управления [63].
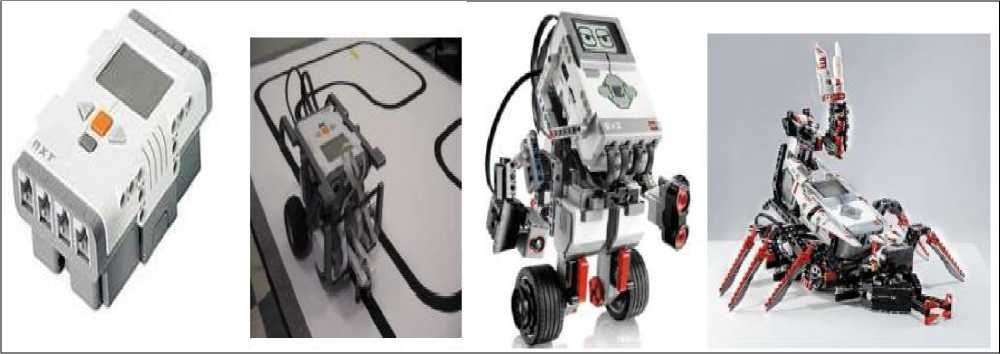
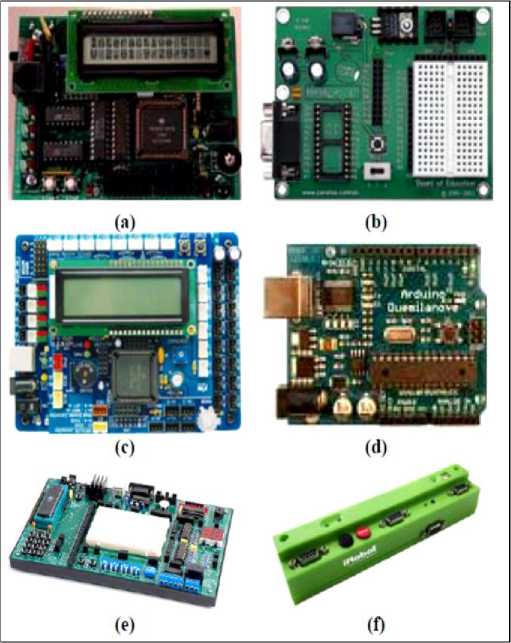
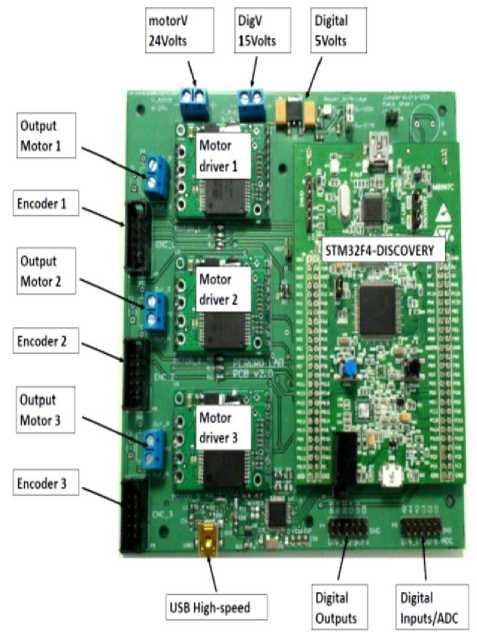
Отсутствие обязательной сертификации и проработки образовательных программ профессионалами из данного направления, позволяет в процессе обучения использовать любое оборудование и учебно-методологические материалы. Например, это широкодоступные и приемлемые для такой работы конструкторы Lego [70 – 77] или в лучшем случае Arduino [78 – 81] (см. рис. 14 и 15). Существует к настоящему времени большое количество разработок контроллеров, позволяющих поддерживать образовательные процессы, максимально приближенных к потребностям промышленности (см., например разработку контроллера ST Microelectronics на рис. 15 (г)). Однако не существует конструктивного перехода от разработок образовательного уровня к проектированию и конструированию реальных роботов. В данном случае необходимо переходить на интеллектуальный робо-тренажер (см. рис. 12 и 13), описание которого подробно представлено в Части 3 данной работы.
(а)
(б)
Рис. 14. LEGO-конструктор (а) и примеры применения (б)
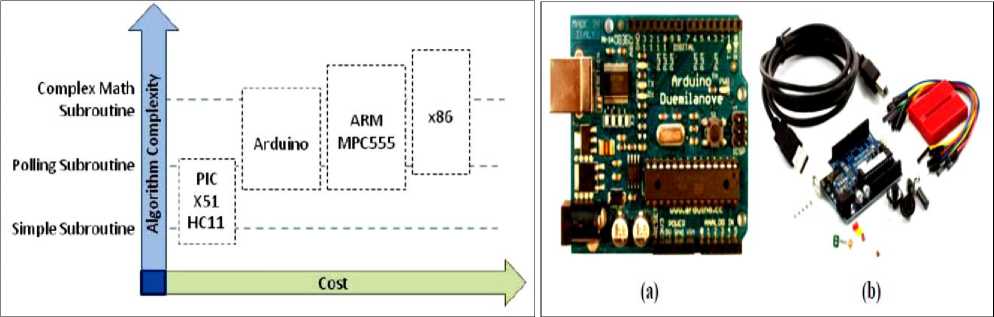
(а)
(б)
(в) (г)
Рис. 15. Зависимость сложности реализации алгоритмов управления от стоимости контроллера (а), вид Aurdino-контроллера (б) примеры Aurdino-контроллеров (в), контроллер ST Microelectronics (г)
Примечание 9 . Однако следует отметить, что коммерчески широко рекламируемый конструкторский робототехнический набор для учащихся средних школ и колледжей типа Lego [74] был разработан в Дании в 1998 г. для реализации идеи «коллективного мозгового штурма» и к настоящему времени идеологически существенно устарел. Более того, методология, разработанная в [70-85], т.н. «конструкционизм» и его многочисленные формы развития, построены на поддержании в основном коммерческой составляющей разработки, т.к. идеолог данной методологии был С. Пейперт. Дело в том, что роботы LegoMindstorm (их также называют образовательноинновационными наборами) создавались в сотрудничестве с MIT MediaLab с середины 1990-х годов для обучения и тренинга. Исследование проводил С. Пейперт, соучредитель Лаборатории искусственного интеллекта в Массачусетском Технологическом Институте (MIT), далее он участвовал в работе Группы эпистемологии и обучения в Медиа-лаборатории того же института.
Сама идеология и методология обучения построены на стремлении быстрого проявления возбуждения и проявления интереса неподготовленного школьника к робототехнике за счет активного участия в сборке готового робота и простейшего программирования заданного элементарного движения, без объяснения сущности создания самого робота и особенно в чем сущность и роль алгоритма управления роботом. По существу преследовалась цель коммерциализации разработанных продуктов за счет распространения в широкой аудитории дошкольного и школьного образования.
В связи с полным разрушением кадровой политики в образовательном процессе и разрушением материально-технической базы университетов и школ, рынок образовательных услуг для мировых компаний по робототехнике в РФ оказался свободным и доступным без конкуренции для продажи старых зарубежных технологий образовательных процессов. По существу, заполнив образовавшуюся нишу старой технологией, под эгидой государственной поддержки отечественная образовательная система готовит морально устаревших специалистов, которые изначально сразу могут оказаться невостребованными на рынке интеллектуального труда. При этом затраты на приобретение оборудования значительно превышают необходимые затраты на развитие собственной образовательной программы. Создавшаяся ситуация в образовательном процессе привела к образованию кластера обучения по принципу « Low-cost mobile robot platform » («робототехнические платформы малой стоимости»), позволяющий сбалансировать сложность программной реализации алгоритмов управления и аппаратной реализации со сложностью и стоимостью соответствующего контроллера [70, 78, 86-89].
Данный подход позволил осуществить миниатюризацию аппаратной части робота при минимальной стоимости контроллера. Однако введенный принцип не отражает все потребности и требования, необходимые для обучения и подготовки специалистов по робототехнике. Сам же образовательный процесс сводился к наработке заданных навыков на традиционном оборудовании.
В РФ уже активно ведется подготовка требований к образовательным программам и дисциплинам направления - «Робототехника». Обсуждение этого вопроса рассматривается и со стороны чиновников, которые стремятся максимально формализовать взаимодействия автоматизированных робототехнических систем (например, автопилотов, андроидов, беспилотных вертолетов, самолетов и др.) с окружающей средой во всем правовом поле. Однако проблема робототехники состоит на данном этапе не в создании новых типов роботов, а в создании программно-алгоритмического обеспечения, которое позволит выполнять разнообразные технологические операции. Попытка осуществлять технологические операции за счет разнообразия моделей робототехнических систем имеет существенные физические ограничения на аппаратную реализацию и функциональные возможности в условиях непредвиденных ситуациях управления.
Основной проблемой применения Lego конструктора является отсутствие в данном подходе элементов моделирования поведения робота, введение алгоритма управления и его программной поддержки, стартуя с процесса сборки робота по заданной инструкции и существенно зависит от квалификации преподавателя.
В данной работе дано описание программно-алгоритмической и аппаратной поддержки методологии образовательного процесса, разработанного в [4], показаны конкретные пути решения поставленной задачи: эффективная разработка интеллектуальной робототехники без разрушения ИТ проектирования изделий мехатроники (исполнительского уровня традиционной системы автоматического управления), т.е. с сохранением преимуществ предыдущих ИТ проектирования робототехнических комплексов.
Разработанный интеллектуальный инструментарий ( computational intelligence toolkit ) позволяет: построить активный образовательный процесс для учащихся средней школы и профессиональных колледжей по принципу «от простого к сложному» (« down - up »); организовать творческий процесс конструирования мехатроники; сформировать профессиональные представления и компетенции в области программирования робототехники; для студентов университетов соответствующих специальностей сформирован курс лекций, семинаров и лабораторных работ на интеллектуальном робо-тренажере, позволяющие в процессе моделирования, проектирования, конструирования на 3 D принтере создавать реальные изделия мехатроники и осуществлять «интеллектуализацию» полученного изделия для достижения цели выполнения требуемой технологической операции (« up -down » - декомпозиция сложной задачи на простые модули); осуществлять проектирование новых
Сетевое научное издание «Системный анализ в науке и образовании» Выпуск № 4, 2016 год видов робототехники и повышать квалификацию сотрудников промышленных компаний (« down – up – down »).
Такой подход к формированию образовательного процесса с индивидуальной траекторией обучения позволяет на каждом этапе обучения извлекать и формировать активные знания, непосредственно протестировать полученные навыки проектирования интеллектуальной робототехники как коммерчески привлекательный продукт.
Выполнение бакалаврских, магистерских и кандидатских диссертаций на интеллектуальном робо-тренажере позволяет формировать новые виды лабораторных работ и формировать портфель заказов на коммерчески привлекательные продукты интеллектуальной робототехники.
Как качественно обучать и готовить профессиональные кадры для НИР и производства на основе ИТ образовательной робототехники?
Стремление компаний-разработчиков робототехники создавать конкурентно-способные и коммерчески привлекательные робототехнические изделия столкнулось с препятствием в виде объективной сменой платформы информатики в программно-алгоритмическом обеспечении и в виде введения законов квантовой информации и перехода к нанотехнологиям в аппаратном обеспечении. Отсутствие базиса восприятия и соответствующих технологических процессов привели к отставанию ИТ проектирования роботехнических комплексов, ограничиваясь разработкой макро- и минироботов, что практически уравняло шансы успеха компаний на рынке и вызвало возрастание потребностей в специалистах нового поколения [4-16].
Однако образовательные программы в силу объективной невозможности включать мгновенно новые результаты в учебно-образовательные процессы всегда отстают от получаемых в НИР научных результатов. Так, например, смена платформы аппаратной поддержки была предсказана публикацией [28] еще в 1982 г. и было открыто новое направление в теории и систем управления в виде квантового интеллектуального управления, которое далее интенсивно разрабатывалось в University of ElectroCommunications ( Tokyo, Chofu ) в лаборатории Intelligent Quantum IT (руководитель С.В. Ульянов) совместно с Nagoya University ( International Center of Micro & Nano Robotics , руководитель T. Fukuda ) при поддержке компаний STMicroelectronics и Nippon Denso [4].
Известно, что от разработки наукоемкой ИТ до ее практической реализации требуется от 5 до 30 лет. Нанотехнологии и квантовое управление нано-роботами являются типовыми примерами данного факта. В [27-30] показано, что квантовое управление на основе законов квантовой теории информации позволяет решать задачи робототехники алгоритмически не разрешимые классическими методами теории и систем управления. Данный результат получен как синергетический эффект от взаимодействия в системе «колледж – университет – компания – рынок», рассмотренный в [4].
В свою очередь, развитие инженерии программного обеспечения новых ИТ на основе квантовых вычислений и квантовой информатики требует освоения нового математического аппарата [90] и преодоления психологического барьера у инженерной аудитории, возникающего при приобретении новых знаний в области квантовой информатики [26, 28, 29].
Поэтому здесь обсудим некоторые особенности полученного синергетического эффекта. Для этого в первую очередь коротко рассмотрим состояние развития образовательной робототехники, исходя из опыта работы, описанного в [4].
Так, например, при работе с 1992 г. одним из авторов (С.В. Ульянов) в University of ElectroCommunications ( Tokyo ) в Японии, предметы «программирование» и «робототехника» были совмещены и согласовано включены в образовательную программу начальных классов. Программа средней школы включает моделирование и подготовку на физических моделях автономных роботов, андроидов, манипуляторов и простых систем стабилизации. Предметную область преподают сотрудники компаний из R&D и университетов с целью поиска и воспитания талантливых студентов-исследователей для университета и в дальнейшем для работы в компании. При поступлении в профильный университет абитуриенты сдают специальный экзамен «Информатика», включающий элементы программирования и разработки робототехники. Экзамены длятся три дня, в которых на собеседовании участвуют преподаватели специализированных кафедр.
Направления высших учебных заведений связаны с развитием технологий проектирования и разработки программного обеспечения для новых роботизированных систем, реально разрабатываемых в промышленных компаниях [4-16, 19, 20]. В ЕС и США самыми популярными и представительными являются примеры Питтсбурского ( Pittsburgh ), Стэнфордского ( Stanford) университета и Массачусетского Технологического Института ( MIT, Boston ). Результатами такой работы стали операционные системы для роботов и всевозможные алгоритмы обработки информации, представленные в курсах по дисциплине «Информатика».
Анализ и опыт работы в проблемно-ориентированных университетах РФ показал, что такой подход приводит к инерционности системы обучения и запаздыванию разъяснения сущности и преимуществ новых разработанных ИТ проектирования робототехнических комплексов. В результате выпускник технического университета не обладает необходимым набором компетенций, необходимых для разработки роботов для современного производства и исследовательской работы. Так, например, в РФ выпускники 2017 г. по специальности «Робототехника» морально устарели на рынке интеллектуального труда по объему знаний на 20 лет по сравнению с выпускниками университетов США, Японии, Китая и ЕС.
Достаточно отметить, что University of Electro-Communications ( Tokyo ) в Японии в 1995 г построил четыре «чистые» комнаты на кампусе университета, в которых бакалавры и магистры могут разрабатывать микро- и нанороботы, а также микро- и наноэлектронику для мехатроники макророботов. При этом компании-разработчики поставляют студентам оборудование и программные продукты, которые будет выводиться компанией на рынок только через 5-7 лет, что позволяет готовить специалистов для компании владеющих современными ИТ проектирования.
Можно ли в такой ситуации организовать (на слабо оснащенной материально-технически базе) государственного университета РФ образовательный процесс обучения и разработки современных систем ИТ проектирования робототехнических систем, а также выпускать востребованных на рынке интеллектуального труда высококвалифицированных специалистов для проектирования макро-, микро- и нано-роботов?
Ответ на поставленный вопрос дан в следующем разделе.
Создание робототехники через образовательные процессы
Для создания образовательных лабораторных роботов и программ, которые могут взаимодействовать с исследовательскими центрами компаний, передовые университеты часто сознательно стараются не использовать унифицированные конструкторы и комплектующие, что расширяет кругозор обучаемого и позволяет формировать новые принципы и представления о проектировании новых типов роботов [91, 92]. Для этих целей приобретается самое современное оборудование - видеокамеры, лазерные радары, манипуляторы, двигатели и платы, развивают свое алгоритмическое и программное обеспечение и др. Именно, огромное изобилие самых современных сенсоров, вычислительных средств и исполнительных устройств и механизмов, позволяют создавать все новые и более совершенные алгоритмы обучения, адаптации и самоорганизации ИСУ. Каждая из таких технологий, закладываемая в конечное изделие, является объектом интеллектуальной собственности и подлежит тщательной защите. Именно такой подход заложен в структуру интеллектуального робототехнического тренажера (см. рис. 1 2).
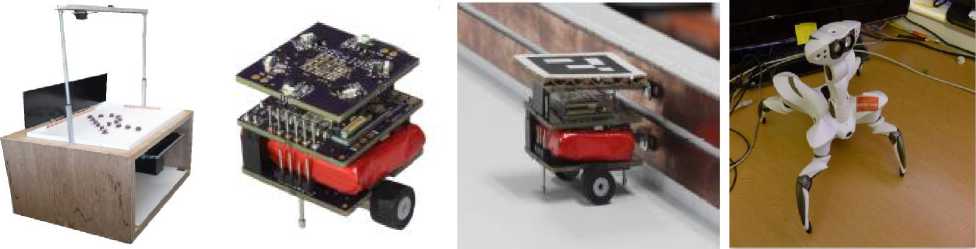
На рис. 16 представлен учебно - исследовательский робот «мобильный манипулятор» университетов (HERB: Home Exploring Robotic Butler [93] и STAIR: STanford Artificial Intelligence Robot [94] и мн. др.), являющихся исторически источниками и платформой для создания новых ИТ и программных продуктов.
HERB

STAIR
1960 – 1970 гг.
2005 – 2010 гг.
2010 – 2015 гг.
Рис. 16. Примеры роботов ведущих университетов
Следующим шагом в образовательном процессе был этап моделирования взаимодействия в коллективе роботов на простейшей платформе.
На рис. 17 представлены варианты интеграции коллектива мобильных мини-роботов, выполняющих задачу движения по индивидуальной траектории без столкновения [89].
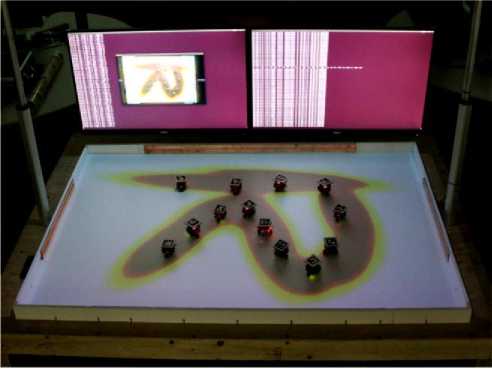

(а)
(б)
Рис. 17. Общий вид стенда Robotarium с использованием роботов 13 GRITSBot (а) общий вид робота GRITSBot (б) .
Результаты применения таких работ воплотились в появление специализированных программных инструментариев для проектирования традиционных систем управления. В свою очередь создание открытых библиотек на базах этих инструментариев позволило привлекать огромный класс специалистов и исследователей, для программно-аппаратного интерфейса, что дает толчок развитию архитектуры технологий, инструментариев и продуктов коммерческой собственности.
Однако, приведенный программно-аппаратный инструментарий не дает методологически возможности перейти к разработке и изучению динамического поведения более сложных моделей роботов, представленных, например, на рис. 18 или 19.
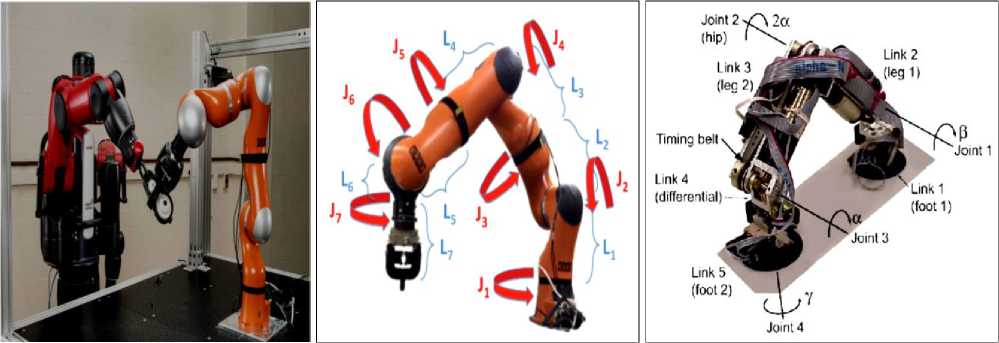
Рис. 18. Динамика коллективного взаимодействия и кинематика роботов-манипуляторов
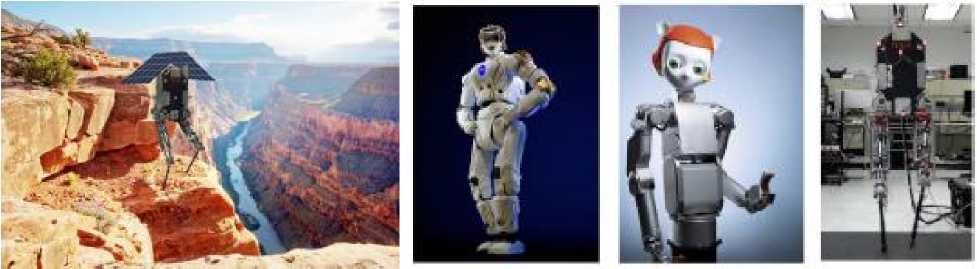
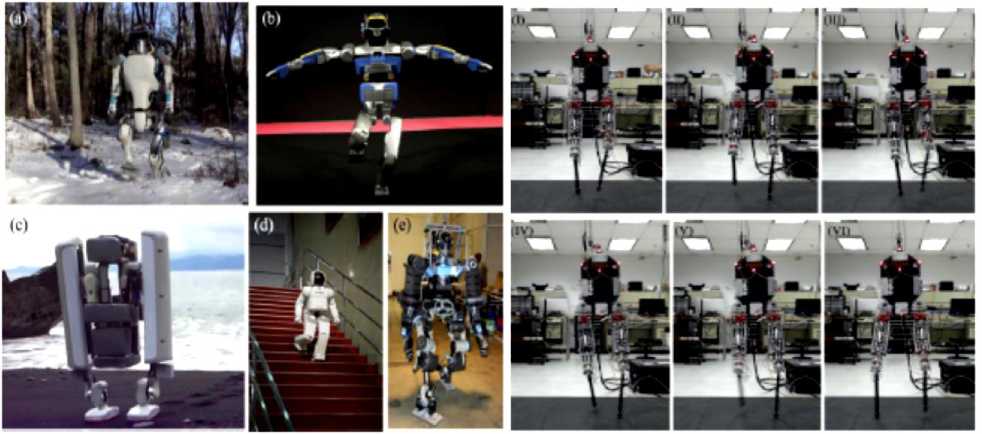
Рис. 19. Кинематика и динамика моделей шагающих роботов
Для изучения такого рода нелинейных моделей, знаний приобретенных на простых моделях роботов недостаточно. Помимо новых принципов мехатроники, данные модели требуют также новых принципов интеллектуального управления. Создание математических моделей приводит к системе существенно нелинейных систем уравнений с нечеткими или случайными параметрами и получить аналитическое решение таких систем уравнений практически невозможно.
Выводы
Проведенный анализ существующих моделей макророботов показал, что модели мехатроники для создания макророботов не обладают системами управления с необходимым уровнем интеллектуальности. Работоспособность и эффективность такого рода моделей резко снижается в условиях непредвиденных ситуаций управления или неопределенности исходной информации о среде функционирования. Требуется разработка и внедрение интеллектуальных систем управления. Такой подход позволяет создавать широкий спектр интеллектуальных роботов на основе уже существующей платформы мехатроники. В этом случае образовательный процесс возможно формировать параллельно с разработкой интеллектуальных роботов на интеллектуальном робо-тренажере. В результате имеется возможность применять новые принципы интеллектуального когнитивного управления без разрушения ИТ проектирования аппаратной части мехатроники. Из-за отсутствия материально-технической базы разработки современной мехатроники в университетах РФ возможно формировать образовательные процессы по разработке интеллектуальных роботов за счет программно-алгоритмической поддержки существующей мехатроники. В этом случае возможен плодотворный альянс сотрудничества с заинтересованными ведущими компаниями-разработчиками и университетами по созданию коммерчески привлекательных интеллектуальных роботов на основе интеллектуальной собственности на программно-алгоритмический инструментарий.
Список литературы Интеллектуальная робототехника. Ч. 2: социо-экономико-техническая платформа когнитивного образовательного процесса
- Gradetskiy V.G., Ulyanov S.V., Chernousko F.L. et. all Mobile systems with vertical displacement robots // J. of Computer and Systems Sciences Intern. - 1993. - Vol. 31. - № 2. - Pp. 126-142. (русский вариант - Изв. АН СССР. Техн. Кибернетика. - 1991. - №6. - С. 171-191).
- EDN: PSEJNZ
- Ulyanov S.V., Yamafuji K., Fukuda T. Development of intelligent mobile robots for service use and mobile automation systems including wall climbing robots: Pt. 1, Fundamental design principles and motion models // Intern. J. of Intelligent Mechatronics. - 1995. - Vol.1. - № 3. - Рp. 111-143.
- Ulyanov S.V., Yamafuji K., Pagni A. Expert fuzzy-neuro controller design for wall climbing robot for decontamination of nuclear-power plant. // J. of Robotics and Mechatronics. - 1995. - Vol.7. - № 1 - Pp. 75-85.
- Ульянов С.В. Интеллектуальная робототехника Ч I: Креативный когнитивный образовательный процесс - синергетический эффект альянса сотрудничества «колледж - университет - компания - рынок» // Системный анализ в науке и образовании: сетевое научное издание. - Дубна, 2016. - №4. - [Электронный ресурс]. URL: http:/www.sanse.ru/archive/5. - (дата обращения: 06.01.2017).
- Kozul-Wright R. Robots and industrialization in developing countries // United Nations Conference on Trade And Development (UNCTD). - 2016. - Vol. 50. - Pp. 1-4.
