Интеллектуальная робототехника Ч.3: концепция когнитивного обучения - интеллектуальный роботренажер

Автор: Решетников Андрей Геннадьевич, Тятюшкина Ольга Юрьевна, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 1, 2017 года.
Бесплатный доступ
Рассматриваются функциональные структуры (социально значимой и востребованной социумом) интеллектуальной робототехники для применения в образовательном процессе. Дано описание структуры научно обоснованного роботренажера для разработки научно-методологического, программно-алгоритмического и технического базиса когнитивного обучения ИТ проектирования интеллектуальных самоорганизующихся робототехнических комплексов, объективно удовлетворяющих необходимым и возможным перспективным потребностям социотехнических систем.
Робототехника, интеллектуальные системы управления, когнитивное обучение, 3d-моделирование, робастные базы знаний
Короткий адрес: https://sciup.org/14123270
IDR: 14123270
Self-adaptive bacterial foraging algorithm
Necessary and possibly social-technical and social-economic objective conditions for development of scientific - methodological, computational intelligence toolkit and technical basis in the domain of intelligent robotics are described.
Текст научной статьи Интеллектуальная робототехника Ч.3: концепция когнитивного обучения - интеллектуальный роботренажер
Наукоемкая ИТ («философии инженерного проектирования – System of Systems Engineering Ap-proach ») интеллектуальной робототехники, разработанная школой проф. С.В. Ульянова [1-10], аккумулирует и развивает результаты многих наукоемких ИТ, таких как технология искусственного интеллекта, нейрофизиологии в виде нейроинтерфейсов типа «мозг – компьютер – исполнительное устройство», робастное интеллектуальное когнитивное управление в условиях нештатных ситуаций, нанотехнологий в виде новых интеллектуальных материалов, квантового управления и нанороботов, ИТ интеллектуальных вычислений, технологии разработок новых алгоритмов и программного продукта типа квантовых алгоритмов и квантового программирования для проблемно-ориентированных роботов и мн. др.
Эволюция и развитие самой ИТ проектирования корректных моделей интеллектуальной робототехники, таким образом, зависит от перспективности и степени развития как собственных ИТ, так и многих смежных из перечисленных выше перспективных ИТ проектирования.
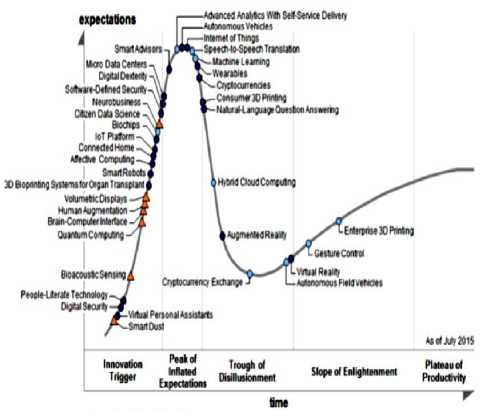
Ускоренное развитие ИТ в смежных областях и достижения отдельных компаний и университетов в разработке инновационных ИТ проектирования робототехники отразилось в прогнозировании и обосновании развития направлений работ, с одной стороны, и резком отставании образовательных программ университетов и колледжей при подготовке профессиональных кадров для таких ИТ, с другой стороны. Так, например, существует модель (см. рис. 1), предложенная компанией Gartner для прогнозирования и объяснения тенденций, связанных с появлением новых ИТ.
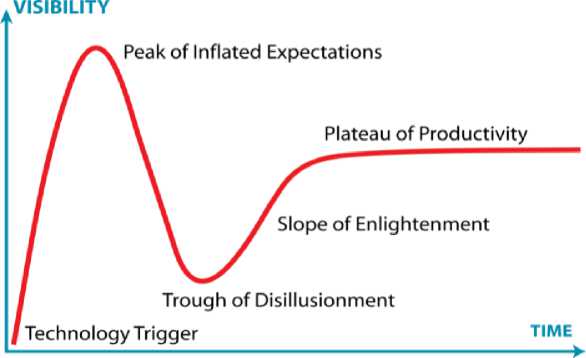
Рис. 1. Прогноз развития перспективных ИТ
Модель показывает, насколько перспективной является технология на основании степени интереса к ней со стороны общества и специалистов. Как правило, она используется при принятии решений об использовании той или иной технологии в бизнесе или инвестировании в бизнес, который использует эту технологию. Цикл представляет собой график кривой, на которой отображаются позиция технологии. На оси абсцисс отображаются этапы во времени, которые проходят технологии. На оси ординат – уровень ожиданий от этой технологии. Точка технологии на графике может принадлежать одному из пяти типов в зависимости от прогноза зрелости конкретной технологии.
Сотрудники американской консалтинговой компании Gartner выделяют следующие типы: меньше, чем через 2 года; от 2 до 5 лет; от 5 до 10 лет; больше, чем 10 лет; устарела до плато ( obsolete before plateau ). Любая технология циклически проходит этапы своей зрелости, от рождения до стабильного коммерческого внедрения:
-
- technology trigger ( Технологический триггер ). Технология зарождается. Начинаются обсуждения в среде специалистов с постепенной миграцией публикаций в общественную прессу. Некоторые технологии «умирают» на этой ступени.
-
- peak of inflated expectation ( Пик чрезмерных ожиданий ). Общественный ажиотаж приводит к чрезмерному энтузиазму и нереалистичным ожиданиям. Появляются первые компании, которые пробуют внедрить технологию. Как правило, неудачные, но, благодаря новизне, технология становится популярной и вызывает бурные обсуждения в социуме.
-
- trough of disillusionment ( Пропасть разочарования ). Выявляются недостатки технологии. В социуме отмечается разочарование технологией, связанное с несоответствием ожиданиям. Не все технологии могут преодолеть пропасть, оставаясь в ней на долгое время или навсегда.
-
- slope of enlightenment ( Склон просвещения ). Эффективный поиск решений проблем технологии. Технология преодолевает основные недостатки. Появляются первые коммерческие внедрения и стабильная аудитория. После успешных попыток и полученных результатов интерес социума начинает возвращаться.
-
- plateau of productivity ( Плато продуктивности ). Технология переходит из разряда новой в достоверно разработанную и подтвержденную на практике. Внедрение технологии можно повсеместно наблюдать в рамках её бизнес-домена. Общество воспринимает технологию как данное, осознавая её реальные преимущества и недостатки.
Прогноз развития перспективных моделей ИТ от компании Gartner на 2016 представлен на рис. 2.
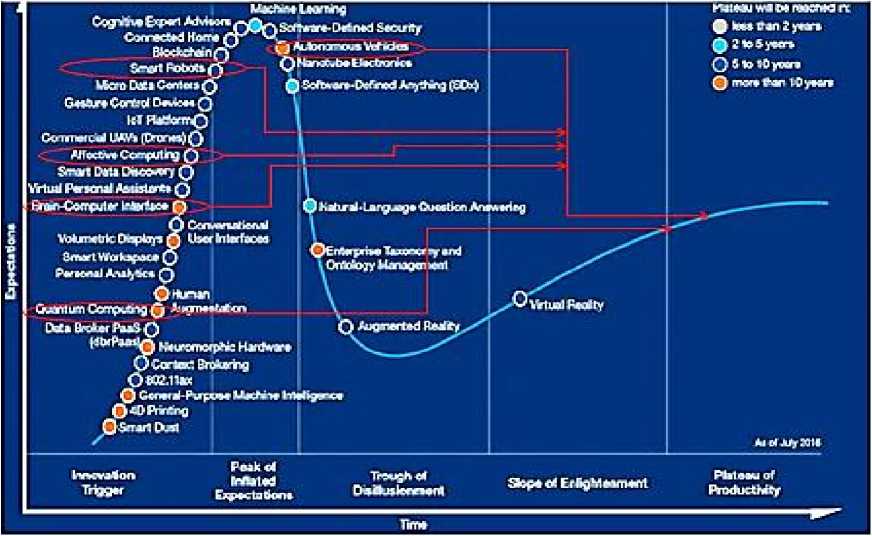
Рис. 2. Перспективы развития ИТ на 2016 г.
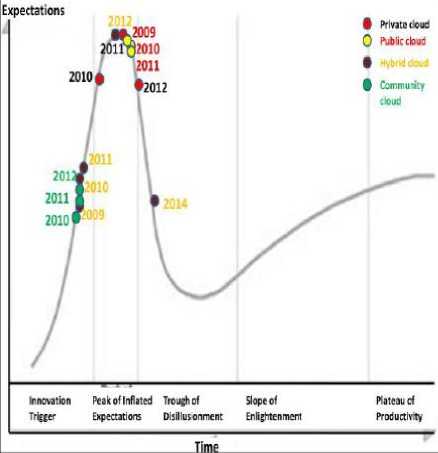
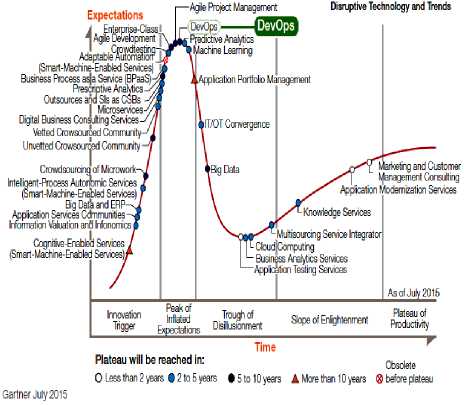
На рис. 3, а, б показан анализ перспективных ИТ в области облачных вычислений и робототехники [11-14], соответственно.
(а)
(в)
Рис. 3. Развитие ИТ в области облачных вычислений (а), робототехники (б), автоматизации (в) и образовательных процессов (г)
Pla tea и will be reached In: obsolete
(б)
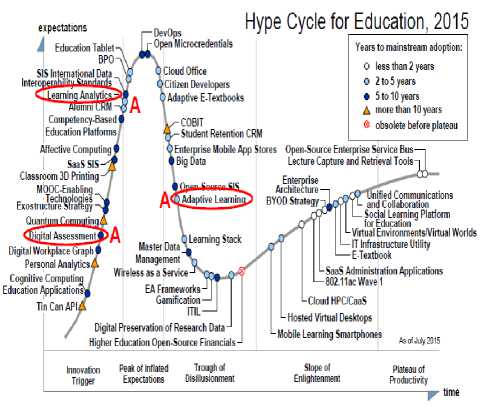
(г)
Основная критика предложенной фирмой Gartner модели связана с тем, что о перспективности технологии судят по количеству положительных и отрицательных упоминаний о ней в социуме, а не некоторых объективных критериях, отображающих действительную эффективность технологии. Использование этой модели накладывает риск на того, кто её использует, что и подтверждают небольшое количество неверных заключений самой компании Gartner , сделанных при помощи этой модели. В частности, Gartner ежегодно составляет «циклы зрелости технологий» – Gartner Hype Cycle , в которых прогнозирует темпы развития инноваций. Издание Startuplife.by показало, какие 10 трендов, по мнению Gartner , будут развивать прогресс в 2017 г. Например, кроме «цикла ажиотажа» Gartner собирает ТОП-10 технологий в трёх категориях. Каждый год технологии и циклы преимущественно разные. Так выглядит прогноз агентства Gartner на 2017 г.
TOP 10 Trends 2015-2017
|
2015 |
2016 |
2017 |
|
Merging the Real World and Virtual World |
Digital Mesh |
intelligent |
|
Computing Everywhere |
Device Mesh |
Artificial Intelligence and Advanced Mactine Learning |
|
The Internet of Things |
Continuous & Ambient UX |
Intelligent Apps |
|
3D Printing |
3D Printing Materials |
Intelligent Tilings |
|
Intelligence Everywhere |
Smart Machines |
Digital |
|
Advanced, Pervasive and Invisible Analytics |
Information of Everything |
Virtual Reality and Augmented Reality |
|
Context-Rich Systems |
Advanced Machine Learning |
Digital Twins |
|
Smart Machines |
Autonomous Agents&Things |
Btockchains and Distributed Ledgers |
|
The New IT Reality Emerges |
New IT Reality |
Mesh |
|
Cloud/Client Computing |
Adaptive Security Architecture |
Conversational Systems |
|
Software-Defined Applications and Infrastructure |
Advanced Systems Architecture |
Digital Technoiogy Platforms |
|
Web-Scale IT |
Mesh App & Service Architecture |
Mesh App and Service Arclltecture |
|
Risk-Based Security and Self-protection |
loTArchitecture & Platforms |
Adaptive Security Architecture |
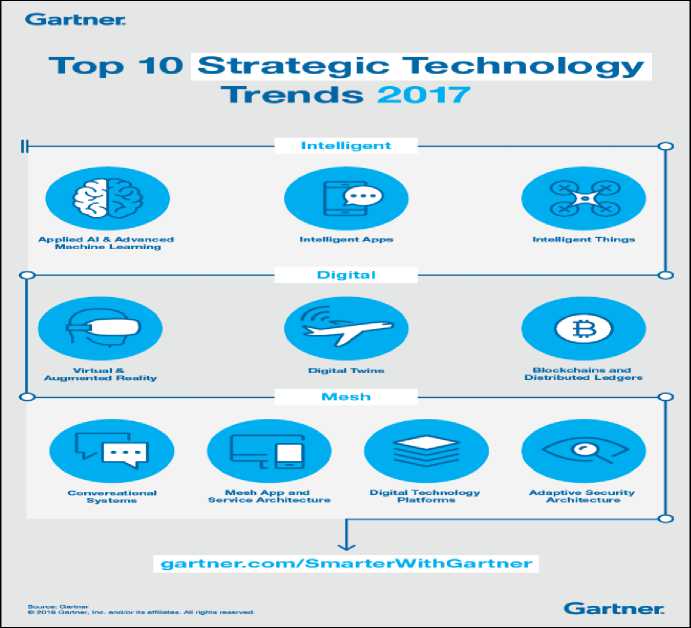
ИТ проектирования интеллектуальной робототехники, как отмечалось выше, по своей сути опирается на ИТ искусственного интеллекта (раздел Intelligent ), новые виды интеллектуальных и когнитивных вычислений, новые виды интеллектуального когнитивного управления типа нейроинтерфейсы «мозг – компьютер – исполнительное устройство» и др.
Если обратиться к графику на рис. 2 и 3, то видно, что к самым перспективным ИТ относятся в частности ИТ « quantum computing », « brain – computer interface », « affective computing », « smart robots », « machine learning », «autonomous vehicle», которые и составляют платформу интеллектуальной когнитивной робототехники, которые и были ранее заложены в структуру разработанного интеллектуального роботренажера.
Данный прогноз от Gartner можно в определенном смысле считать достаточно «запоздалым», так как ещё с 1996 г. перечисленные ИТ являются для групп проф. С.В. Ульянова в РФ, Италии, Японии и США предметом интенсивного исследования, и закреплены соответствующей интеллектуальной собственностью высшей категории в виде публикаций и патентов в США, странах ЕС, Китае и Японии (см., например, [1-9] и цитированную литературу).
Эволюция и синергетика ИТ в проектировании корректных моделей интеллектуальных робототехнических систем
Согласно прогнозу данные ИТ могут быть реализованы через 10 и более лет. Однако синергетический эффект, полученный группами проф. С.В. Ульянова на протяжении 37 лет в университетах СССР (МИРЭА и ФизТех, Москва), ИПУ, ИФТП и ИПМ АН СССР (Москва), Японии (University of Electro-Communications , Tokyo , Chofu ), Италии ( Milan University , Crema ) и США ( CA University , San Diego ), а также в R&D Centers ( ST Microelectronics & Yamaha Motors Co ., Ltd .), от взаимодействия перечисленных выше ИТ в разработке ИТ проектирования интеллектуальной робототехники, дал положительный результат как в ускоренном развитии и разработке указанных ИТ, так и в реализации самой интеллектуальной робототехники.
Полученный синергетический эффект [10] намного опередил прогноз от компании Gartner и составил основу разработки ИТ модели интеллектуального роботренажера.
В частности, появилась возможность создать принципиально новую научно обоснованную платформу образовательного процесса в интеллектуальной робототехнике на основе нового вида интеллектуального самоорганизующегося роботренажера, учитывающий в учебном процессе опережение результатов разработки ИТ проектирования на базисе интеллектуальных вычислений и новых видов мехатроники.
В данном образовательном процессе обучающийся формирует свои активные знания за счет участия в создании новых видов мехатроники, алгоритмического обеспечения и программного продукта для интеллектуального когнитивного управления конкретного робота. В этом случае осуществляется извлечение новых знаний и обучающийся может непосредственно оценить приобретенные знания, сравнивая с предыдущими этапами, например, исследования и формирования БЗ самоорганизующегося нечеткого регулятора и т.п. Поэтому синергетический эффект самоорганизации знаний может быть проверен непосредственно математическим и физическим (натурным) моделированием на разработанном роботренажере.
Рассмотрим кратко концепцию построения интеллектуального самоорганизующегося роботре-нажера для когнитивного обучения проектированию интеллектуальной робототехники.
Список литературы Интеллектуальная робототехника Ч.3: концепция когнитивного обучения - интеллектуальный роботренажер
- Ulyanov S.V. et all Fuzzy models of intelligent industrial controllers and control systems: I. Organizational, engineering, cost, and applied aspects // J. of Computer and Systems Sciences Intern. 1994. - Vol. 32. - № 1. - Pp. 123-144. (русский вариант: Изв. АН СССР. Техн. Кибернетика. - 1992. - №5. - С. 171-196).
- EDN: XOUCXN
- Ulyanov S.V., Yamafuji K., Arai F., Fukuda T. Modelling of micro-nano-robots and physical limit of micro control // J. of the Robotics Society of Japan. - 1996. - Vol. 14. - № 8. - Pp. 1102-1105.
- Ulyanov S.V. et all Fuzzy models of intelligent industrial controllers and control systems: I. Organizational, engineering, cost, and applied aspects // J. of Computer and Systems Sciences Intern. 1994. - Vol. 32. - № 1. - Pp. 123-144. (русский вариант: Изв. АН СССР. Техн. Кибернетика. - 1992. - №5. - С. 171-196).
- EDN: XOUCXN
- Ulyanov S.V. et all Fuzzy models of intelligent industrial controllers and control systems: I. Organizational, engineering, cost, and applied aspects // J. of Computer and Systems Sciences Intern. 1994. - Vol. 32. - № 1. - Pp. 123-144. (русский вариант: Изв. АН СССР. Техн. Кибернетика. - 1992. - №5. - С. 171-196).
- EDN: XOUCXN
- Ulyanov S.V., Yamafuji K., Arai F., Fukuda T. Modelling of micro-nano-robots and physical limit of micro control // J. of the Robotics Society of Japan. - 1996. - Vol. 14. - № 8. - Pp. 1102-1105.
