Интеллектуальная система управления расходом жидкого азота в сборнике криогенной установки контроля СП магнитов: мягкие вычисления

Автор: Беспалов Юрий Геннадьевич, Неополитанский Денис Александрович, Никифоров Дмитрий Николаевич, Решетников Андрей Геннадьевич, Седых Георгий Сергеевич, Семашко Сергей Владимирович, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 3, 2022 года.
Бесплатный доступ
В работе представлены информационные технологии (ИТ), применение которых возможно в задачах интеллектуального управления сложными экспериментальными комплексами. Рассмотрены особенности мягких вычислений, используемых в сквозных квантовых информационных технологиях. Обоснована (с позиции теории и систем интеллектуального управления) схема структуры двухуровневой интеллектуальной системы управления давлением и уровнем азота. Представлены результаты проведенных экспериментов на фабрике магнитов.
Интеллектуальные системы управления, нечёткий нейронный контроллер, генетический алгоритм, сверхпроводящий магнит, ускорительный комплекс
Короткий адрес: https://sciup.org/14126380
IDR: 14126380 | УДК: 512.6,
Intelligent system for control of liquid nitrogen flow in the collection of a cryogenic installation for control of SP magnets: soft computing
The paper presents information technologies (IT), the use of which is possible in the tasks of intelligent control of complex experimental complexes. The features of soft computing used in end-to-end quantum information technologies are considered. Substantiated (from the standpoint of theory and intelligent control systems) is the structure diagram of a two-level intelligent control system for pressure and nitrogen level. The results of the experiments carried out at the factory of magnets are presented.
Текст научной статьи Интеллектуальная система управления расходом жидкого азота в сборнике криогенной установки контроля СП магнитов: мягкие вычисления
Интеллектуальная система управления расходом жидкого азота в сборнике криогенной установки контроля СП магнитов: мягкие вычисления / Ю. Г. Беспалов [и др.] // Системный анализ в науке и образовании: сетевое научное издание. 2022. №3.
Более 40 лет назад начались попытки применения экспертных систем, генетических алгоритмов и нейронных сетей к задачам управления сложными ускорительными установками. Например, рассматривались задачи многокритериальной оптимизации конструкции и компоновки самой ускорительной установки, подбора параметров управления ускорителями в различных режимах, широкое распространение получили «нечеткие» контроллеры с интегрированной базой знаний (БЗ) и системой нечеткого логического вывода - так называемой «интеллектуальной надстройкой», позволяющая человеку-оператору адаптировать и обучать управляемую подсистему ускорительного комплекса [1-16].
Однако большинство попыток внедрения технологий интеллектуального управления являются достаточно обособленными и построены таким образом, что при проектировании обобщенной распределенной интеллектуальной системы, способной гарантировано достигать поставленных целей управления и затрудняют их согласованный перенос (масштабируемое тиражирование) на другие подсистемы ускорительного комплекса.
Основной идеей применения интеллектуального управления является разработка унифицированного инструментария проектирования встраиваемых самоорганизующихся интеллектуальных контроллеров в физическую установку с целью повышения эффективности и надежности ее функциональности и эксплуатации. В данной работе рассматривается информационные технологии проектирования подобных нечетких контроллеров с повышенным уровнем интеллектуальности, разрабатываемые в ЛИТ ОИЯИ [16-17].
Данная публикация является первой из серии работ, раскрывающих особенности и эффективность применения квантовых сквозных информационных технологий в задачах управления экспериментальными установками и посвящена первому этапу проектирования интеллектуальных систем управления на основе технологии мягких вычислений на примере управления расходом жидкого азота в сборнике криогенной установки.
Формулировка задачи интеллектуального управления расходом жидкого азота в сборнике криогенной установки
Рассмотрим задачу поддержания постоянного уровня расхода и давления в сборнике жидкого азота на экспериментальной установке фабрики магнитов, предназначенной для проверки и контроля изготавливаемых сверхпроводящих (СП) магнитов (рис. 1).
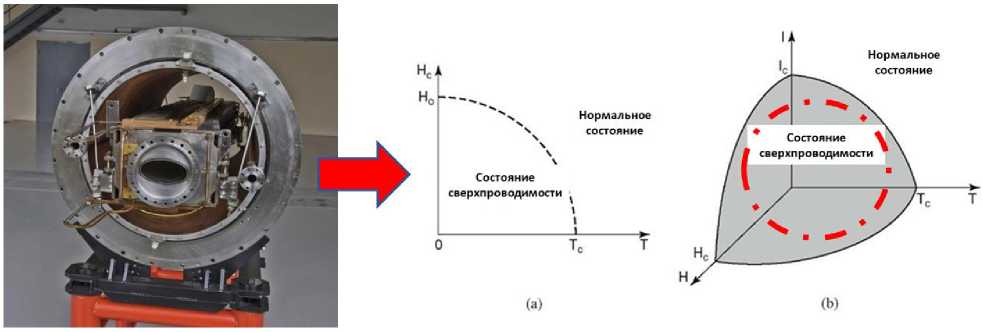
Рис. 1. СП магнит и область сверхпроводящего состояния обмотки магнита
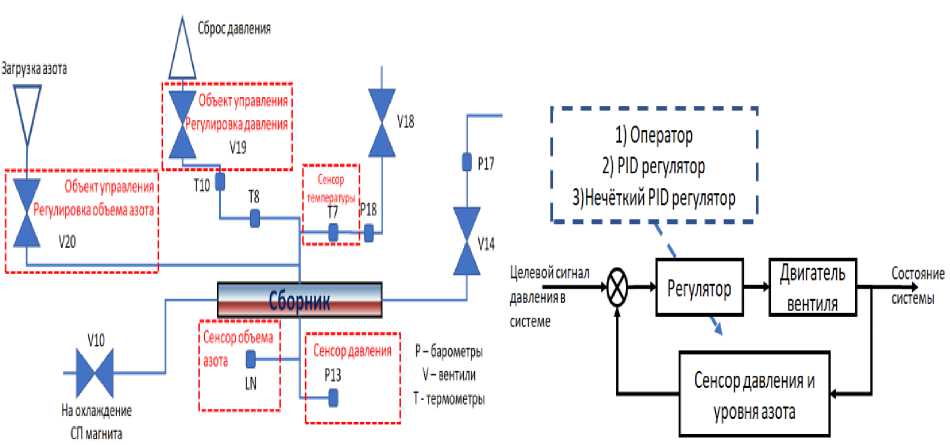
С помощью управления вентилем регулирования давления (рис. 2, позиция V19) и подачи азота (рис. 2, позиция V20) необходимо регулировать проток азота для охлаждения СП магнита и расход азота в сборнике. Отслеживание и контроль состояния контура управления происходит на основании данных с датчика давления (рис.2, p13) и датчика уровня азота(рис.2 LN2). Управление процессом осуществляет оператор экспериментальной установки.
При этом целью экспериментов является проверка поддержания состояния сверхпроводимости обмотки магнита, которое необходимо удерживать в точке равновесия допустимого диапазона изменения тока, температуры и магнитного поля (рис.1).
На рис. 2 представлена структурная схема системы охлаждения азотом на фабрике магнитов.
(а)
(б)
Рис. 2. Структурная схема системы охлаждения азотом (а); и контур управления с обратной связью (б)
Примечание. На рис. 2 (а) показаны сенсоры давления (р13) и объёма азота (ln2) в системе, органы управления подачи азота (v20) и регулирования давления (v19). На рис. 2(б) представлен контур управления с обратной связью, на примере которого рассмотрено управление человеком -оператором и автоматическое управление на основе ПИД регулятора и гибридного нечёткого ПИД регулятора.
Физические особенности СП магнита
В процессе испытаний СП магнитный элемент имеет следующие характерные особенности: присутствует теплоприток из-за вихревых токов, которые приводят к разогреву сердечника; существует теплоприток от стенок; и неравномерное охлаждение в соединительных узлах. Данные особенности отдельного магнитного элемента повышают сложность управления как отдельным элементом, так и группой подобных элементов. Перечисленные и другие особенности СП магнита относятся к классу задач описания объектов управления с плохо формализуемой структурой и неполной информацией о скрытых (не доопределенных) параметрах объекта.
Особенности интеллектуального управления физическими объектами с плохо формализуемой структурой.
Принципы интеллектуального управления подобного рода объектами подразумевают компенсацию потери информации о существующих в реальном объекте неопределённых и неточных параметров магнитного элемента (за счет использования возможностей инструментария технологий мягких и квантовых вычислений) и с учетом их особенностей в индивидуальных баз знаний (БЗ) соответствующих интеллектуальных контроллеров. Данное свойство реализуется обнаруженной и доказанной [24] возможностью извлекать скрытую в классических состояниях квантовую информацию о свойствах структуры объекта управления из физически измеряемого обучающего сигнала и формировать базу знаний интеллектуального регулятора на основе оптимизатора баз знаний, минуя разработку точной математической модели исследуемого объекта управления. В данной работе будет рассмотрен первый этап технологии проектирования основанный на мягких вычислениях.
В таблице 1 приведены входные данные – показатели состояния системы и выходные – параметры исполнительных устройств, управляемых с помощью интеллектуальной системы управления условиями состояния расхода азота в сборнике стенда.
Таблица 1. Входные и выходные данные ИСУ расхода азота
|
Входные данные |
Выходные данные |
|
Данные о состоянии уровня азота |
Целевое положение заслонки вентиля |
|
Данные о состоянии давления азота |
Скорость вращения вентиля |
Процесс тестирования СП магнита проходит в течении нескольких дней, при этом используются различные режимы эксплуатации стенда, а именно:
Азотный режим. В азотном режиме происходит охлаждение гелия азотом, по контурам подачи гелия через азотный сборник сателлитного рефрижератора, также жидкий азот используется для охлаждения тепловых экранов.
Гелиевый режим. В гелиевом режиме СП магнит охлаждается гелием, азот используется для охлаждения и поддержания температур тепловых экранов и части токовводов СП магнита.
При этих режимах регулируется давление и уровень в сборнике азота, регулярно проводится загрузка азота (рис.3).
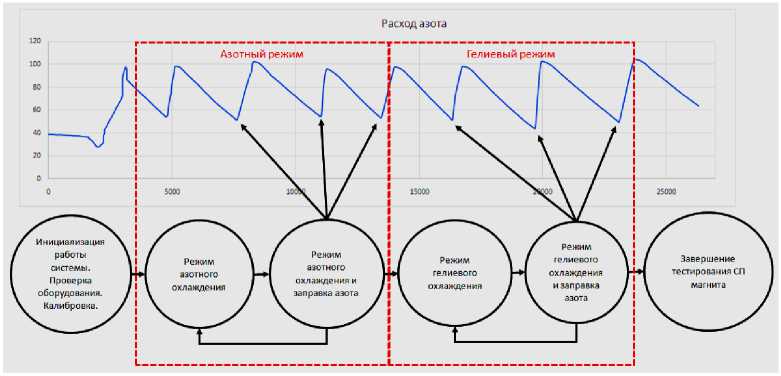
Рис. 3. Схема режимов работы установки
Распределение потока азота между тепловыми экранами и токовводами происходит при помощи дополнительного пневмовентиля, расположенного на испытательном плече. В начале азотного охлаждения основной поток азота направляется на охлаждение тепловых экранов: для этого пневмовентиль закрывается на ~80%. Охлаждение части токовводов до азотного уровня температур происходит при подготовке к переходу на гелиевый режим охлаждения сателлита.
Эффективность прокачки, охлаждения магнитного элемента и поддержание режима сверхпроводимости зависит, в том числе, и от давления в системе охлаждения, а, следовательно, и от давления азота в сборнике. При этом необходимо учитывать увеличение и уменьшение расхода азота в процессе нагревания и охлаждения магнитного элемента, в режимах тестирования подачи тока и эксплуатации с учетом заложенной (присутствующей) неточности исполнительного элемента (вентиля).
Таким образом, имеем модель объекта управления с существенно нелинейными перекрестными связями и не доопределенными параметрами структурных преобразований. В данной работе рассматривается задача интеллектуального управления процессом поддержания заданного давления (цель управления) для режима азотного охлаждения (см. рис. 3).
Методы решения задачи
В качестве решения поставленной задачи поддержания заданного давления рассматривается контур управления первого уровня, реализованный в виде пропорционально - интегральнодифференциального (ПИД) регулятора с настраиваемыми параметрами регулирования ( kp , kd, kt ) (представлен на рис. 4). Выбор оптимальных параметров управления зависит как от перечисленных особенностей в реализации отдельного магнитного элемента, так и при управлении магнитным элементом в различных режимах. При этом рост давления в сборнике происходит за счёт вскипания азота и зависит от интенсивности и нагрузки в работе СП магнита.
Однако рассмотрит вначале взаимосвязь объекта управления и информационной технологии проектирования интеллектуальных систем управления.
Контур управления первого уровня
ЛФВЭ NICA

Задающий | сигнал
ПИД регулятор
Tango PID rp^dule Двигатель , вентиля__Г

Дистанционная настройка базы знаний
Управление параметрами ПИД регулятора
Сенсор давления и уровня жидкости
Tango SCO internee
Передача встраиваемыхБЗ для нечётких контроллеров
Разработка унифицированного интерфейса пользователя для диагностики состояния магнита
•Разработка унифицированного интерфейса для интеллектуализации элементов ускорительного комплекса •Возможность масштабировать на аналогичные объекты NICA
ЛИТ
Моделирование элементов ускорительной установки на испытательном стенде
Построение обучающего сигнала с учётом физической реализации магнитного элемента и математического моделирования
Управление параметрами ПИД регулятора
Грубая и мягкая настройка базы знаний
Рис. 4. Контур управления первого уровня, на основе встраиваемого программного ПИД- регулятора
В задаче получения, хранения и анализа больших экспериментальных данных физических установок принято использовать технологии распределённых вычислений. Обрабатываемые результаты могут быть использованы для выявления ошибок управления и коррекции управляющих воздействий, при этом верификация моделей, идентификация ОУ и формирование обучающих сигналов, требует затрат больших вычислительных ресурсов и соответственно применения технологий суперкомпьютинга. Однако, с одной стороны связанная с физической сложностью и неполнотой описания модель, не является физически строгой и математически корректной (с нечет- кой границей ее строгости и корректности). С другой стороны необходимо учитывать физические особенности установки, режимы ее функционирования, влияния окружающей среды и мн. др. факторы.
Верифицированные модели и реальные измеряемые физические сигналы поведения ОУ являются информационными источниками для получения обучающих сигналов при проектировании БЗ для НР на первом этапе предлагаемой технологии на основе глубокого квантовой машинного обучения. На втором этапе объединение множества различных БЗ в КНВ позволяет достигать глобально робастного интеллектуального управления (см. рис. 7).
На рис. 5 проиллюстрирована взаимосвязь распределенных вычислений и суперкомпьютинга в задаче проектирования интеллектуальной системы управления. Показана тесная зависимость верификации и идентификации ОУ с применением технологий аналитики и обработки больших данных ( Big Data ) и кластеризации на основе выделения и поиска информативных признаков на этапах проектирования БЗ с использованием моделирования на суперкомпьютере.
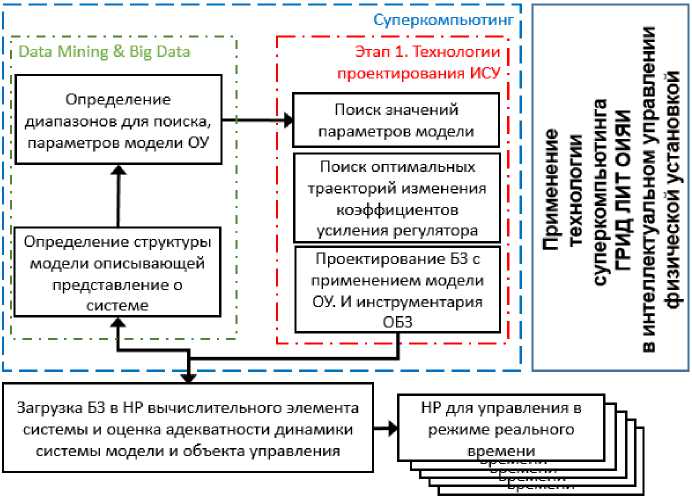
Рис. 5. Суперкомпьютинг в интеллектуальном управлении физической установкой
Особенностью предлагаемой технологии является использование непосредственно физической установки для формирования и получения обучающего сигнала. При этом основой такой технологии являются эвристические эволюционные алгоритмы с дискретными ограничениями.
Рассмотрим, согласно [20] подробнее процесс функционирования подобной системы (рис. 6).
Сенсорная система физической установки считывает показания физического эксперимента и пересылает их в вычислительное устройство для последующей обработки. Приняв входные значения, ОБЗ оценивает эффективность предыдущего решения (загруженной БЗ НР) и осуществляет формирование новой или корректировку используемой базы знаний для проверки следующего решения (БЗ НР), при этом возможен гибридный подход с применением суперкомпьютинка для формирования как индивидуальной БЗ, так и иерархически связанных БЗ многоагентной системы. Результат нечёткого логического вывода отправляется на удалённое устройство. После этого, система управления, обработав входные значения, вырабатывает управляющее воздействие. Прежде чем приступить к установке соединения между ОБЗ и системой управления необходимо установить физические ограничения взаимодействующих устройств, т. е. определить максимальные и минимальные временные границы, временную величину одной итерации с учётом приёма, передачи и обработки информации.
Результаты проведенных исследований показали, что для проектирования качественной и робастной ИСУ недостаточно использовать только математическую модель или реальный ОУ в отдельности. Совместное использование этих информационных ресурсов (в виде извлеченной скры-
Сетевое научное издание «Системный анализ в науке и образовании» Выпуск №3, 2022 год той квантовой информации в классических управляющих сигналах) дает дополнительный синергетический эффект в виде повышения качества управления и робастности проектируемых ИСУ.
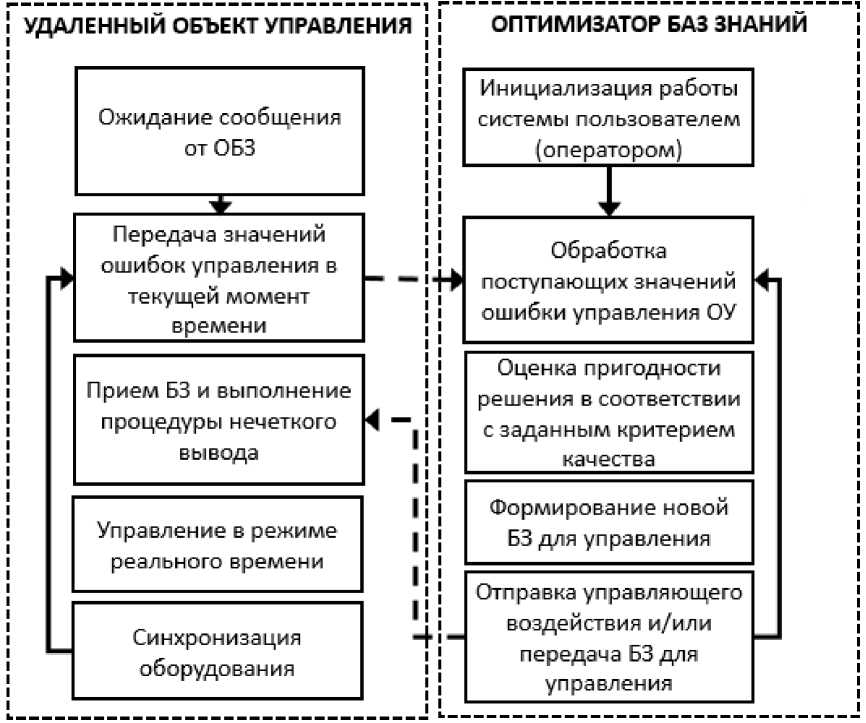
Рис. 6. Структура применения оптимизатора баз знаний в дистанционном интеллектуальном управлении
Оптимизация БЗ с использованием дистанционного соединения с ОУ непосредственно напрямую с ОБЗ даёт ряд преимуществ:
-
- позволяет не разрабатывать математическую модель и при этом получать знания о качественном поведении ОУ для построения БЗ;
-
- для проектирования ИСУ в ОБЗ достаточно снять информативные показатели и параметры поведения ОУ;
-
- дистанционное соединение позволяет оптимизировать БЗ в определённых (типовых) условиях функционирования, и тем самым создавать множество БЗ с высоким качеством управления для различных ситуаций управления.
Отметим, что универсальность технологии дистанционной настройки и передачи баз знаний (БЗ) позволяет объекту управления (ОУ) принимать БЗ от блока ОБЗ, или от других ОУ. Это даёт возможность управления структурно новыми объектами, такими как коллективы автономных роботов, многоагентные системы, сложные автоматизированные производства и распределенные системы мн. др. Кроме того, данная технология позволяет ОУ обновлять и адаптировать БЗ под конкретную ситуацию управления, в т.ч. нештатную ситуацию, непосредственно в режиме реального времени функционирования.
Разработанный инструментарий реализует механизмы создания, настройки и передачи параметров управления в виде сигналов управления, полученных из БЗ НР, не разрушая нижний исполнительный уровень. Использование мягких вычислений и разработанных технологий проектирования ИСУ сокращает влияние экспертных оценок в процессе обучения и настройки ИСУ.
Снижает информационный риск влияния человеческого фактора на принятие решения в условиях возникновения нештатных ситуаций или непредвиденных ситуаций управления.
Рассмотрим пример проектирования ИСУ для управления давлением в накопительной емкости с азотом испытательного стенда фабрики магнитов. На первом этапе проектирования проводилась запись показателей и параметров, установленных оператором в системе управления (рис. 7). Далее, были отобраны наиболее информативно значимые (эффективные) траектории управления вентилем (действий оператора) с точки зрения поддержания требуемого уровня давления и расхода азота, которые рассматриваются как обучающие сигналы (ОС). На основе этих данных с применением технологии проектирования и соответствующего программного инструментария на мягких вычислениях был реализован нечёткий ПИД регулятор (см. ниже рис. 8, а), в виде реализованной программной библиотеки нечёткого логического вывода с интегрированной БЗ в виде нечёткой нейронной сети (рис.8, б) для работы в системах TANGOCONTROL .
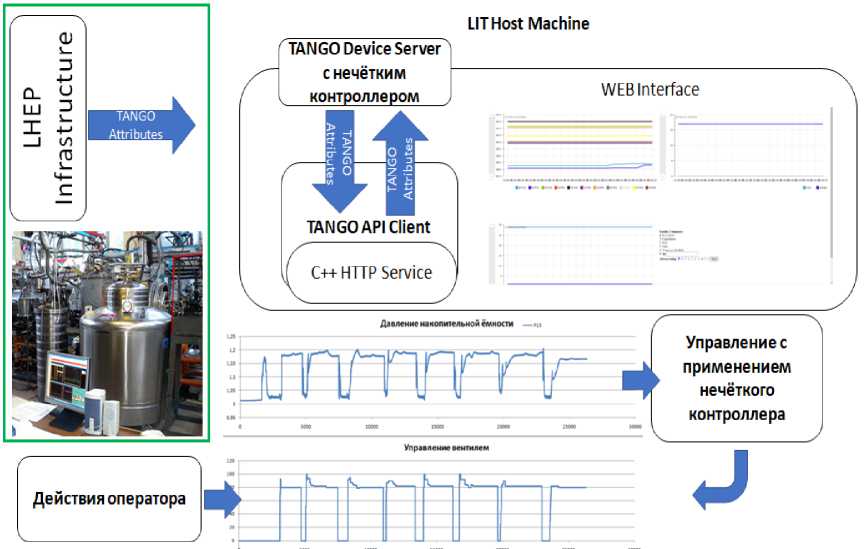
Рис. 7. Разработанные и реализованные программно – аппаратные компоненты системы управления
Важно отметить, что в качестве обучающего сигнала используются реальные данные, полученные с датчиков физической системы (СП элемента магнита, функционирующего в заданном (не)штатном режиме), что позволяет учитывать индивидуальные особенности физической реализации (люфты, шумы, допуски).
Описать функционал и его особенности по скорости передачи данных, защита каналов передачи, особенности сервера, перенос на ВЧ-станцию, накопление и обработка данных, вывод и регистрация данных, интерфейс пользователя и его функциональные особенности, и т.п. !!
Существующее управление комплексом реализована на открытой системе управления TANGOCONTROL , для интеграции в систему была выбрана следующая модель (рис.7). Автоматическое управление, реализовано в различных режимах:
-
- PID регулятор с возможностью ручной настройки регулятора
-
- Нечёткий PID регулятор с возможность дистанционной настройки используя ресурсы суперкомпьютера «Говорун» ЛИТ и канал связи ЛФВЭ-ЛИТ
-
- Квантовый контроллер с повышенным уровнем робастности, в основе которого заложены различные БЗ нечётких регулятором.
Программа управления реализована в виде device server ( DS ) архитектуры Tango-controls . Промежуточным слоем между интерфейсом оператора и управлением сателлитом выступает программа написанная на C ++, которая устанавливает DS того сателлита и типа управления,
Сетевое научное издание «Системный анализ в науке и образовании» Выпуск №3, 2022 год которым необходимо управлять оператору и выполняет прокси функции между панелями оператора и DS конкретного сателлита. DS сателлита принимает команды оператора. Проверяет их правомерность и допустимость в текущих условиях.
Особенностью реализации является то, что эта программа может подготавливать набор данных для оптимизатора базы знаний (ОБЗ) и передавать их в отдельном файле для обработки в offline и online режимах на СК «Говорун». Кроме того для настройки режим работы в реальном времени сервер осуществляет связь с ОБЗ по протоколу OPC UA , для чего в ОБЗ встроен сервер OPC UA и реализуется обмен данными с комплексом в реальном времени. Для обмена данными с device server , промежуточный слой выступает как tango client . Для обмена данными между веб интерфейсом оператора и промежуточным слоем был выбран механизм REST API , который на промежуточным слоем реализован в виде минимального о веб-сервера а со стороны веб интерфейса используется ajax запросы (рис. 7).
Таким образом были разработаны принципы и основы информационной технологии (ИТ) проектирования систем интеллектуального управления с применением технологий суперкомпьютинга для решения задач интеллектуального управления физическими установками и экспериментами.
Структура встраиваемого контроллера и основные функции ОБЗ
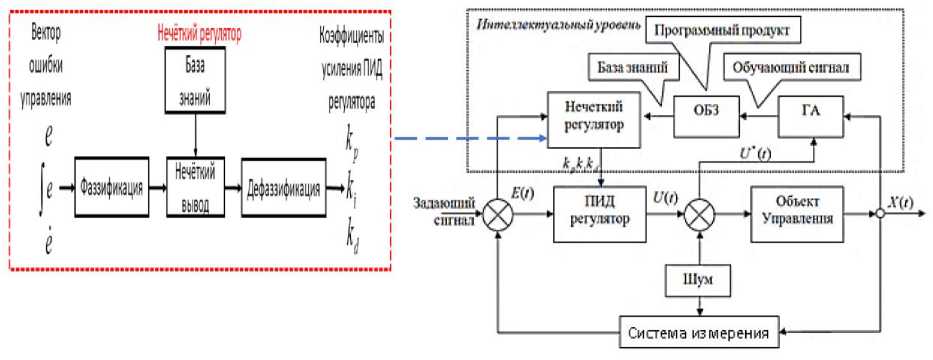
Применительно к проектированию интеллектуальных систем управления (ИСУ), мягкие вычисления представляют собой комбинацию из следующих подходов: теория нечетких систем, генетические алгоритмы (ГА) и нечеткие нейронные сети (ННС). НР является центральным элементом ИСУ и вырабатывает управляющие сигналы изменения во времени (законы управления) коэффициентами усиления k , k , k (coefficient gains chedule) ПИД-регулятора.
В качестве ядра интеллектуальной системы управления динамической системой рассматривается нечеткая система с заданной базой знаний (БЗ). В данном случае это нечеткий регулятор (НР) с базой знаний, описывающей законы изменения переменных коэффициентов усиления ПИД регулятора. НР позволяет в простой лингвистической форме, близкой человеку, описывать стратегии управления и является надежной и эффективной альтернативой классическому управлению.
Функциональная структура ИСУ с блоками НР и ОБЗ на мягких вычислениях представлена на рис. 6. Такая структура включает одновременно следующие качества управления: управляемость, точность и устойчивость (нижний уровень управления – САУ), а также обучение и адаптация (верхний интеллектуальный уровень управления – НР с БЗ).
(а)
(б)
Рис. 8. (а) Структура интеллектуальной системы управления с нечетким регулятором и оптимизатором баз знаний. (б) Структура нечёткого регулятора
Базовая структура нечеткой системы показана на рис. 8 (б). Данная структура используется в инженерной задаче.
Нечеткий контроллер состоит из следующих блоков:
-
- БЗ, содержащая базу нечетких продукционных правил и базу данных, содержащую информацию о виде функции принадлежности лингвистической переменной и ее количественных параметрах;
-
- Вид и структуру механизма нечеткого логического вывода;
-
- Блоки фаззификации и дефаззификации.
База нечетких правил состоит из множества правил типа «если – то». База данных содержит информацию о типах и параметрах функций принадлежности, используемых в нечетких правилах. Блок фаззификации преобразует входное, точное, значение в нечеткое значение. Блок дефаззификации, наоборот, осуществляет инверсное преобразование, отображая значения нечеткого множества в выходное, четкое, значение.
Входом ОБЗ (рис.8 (а)) является обучающий сигнал (ОС), который может быть получен либо на этапе стохастического моделирования поведения ОУ (с использованием его математической модели), либо экспериментально, т.е. непосредственно из результатов измерений динамических параметров физической модели ОУ, что и было выполнено в данной работе.
ОС является источником знаний и представляет собой массив данных, разделенный на входные и выходные составляющие, каждая из которых, в свою очередь, состоит из одного и более сигналов. В случае аппроксимации некоторого управляющего сигнала, входными компонентами могут являться ошибка управления, интеграл ошибки и ее производная, а выходным компонентом – требуемое значение управляющего воздействия, либо некоторые настраиваемые параметры системы управления, например, коэффициенты усиления ПИД - регулятора.
Результатом аппроксимации ОС является построенная БЗ для НР, включающая оптимальное конечное множество правил и оптимально сформированные параметры функции принадлежности входных и выходных переменных НР.
Согласно теореме об аппроксимирующих свойствах ННС, полученный нечеткий регулятор имеет БЗ со свойством универсального аппроксиматора не доопределенных свойств исследуемого плохо формализованного объекта со скрытыми параметрами.
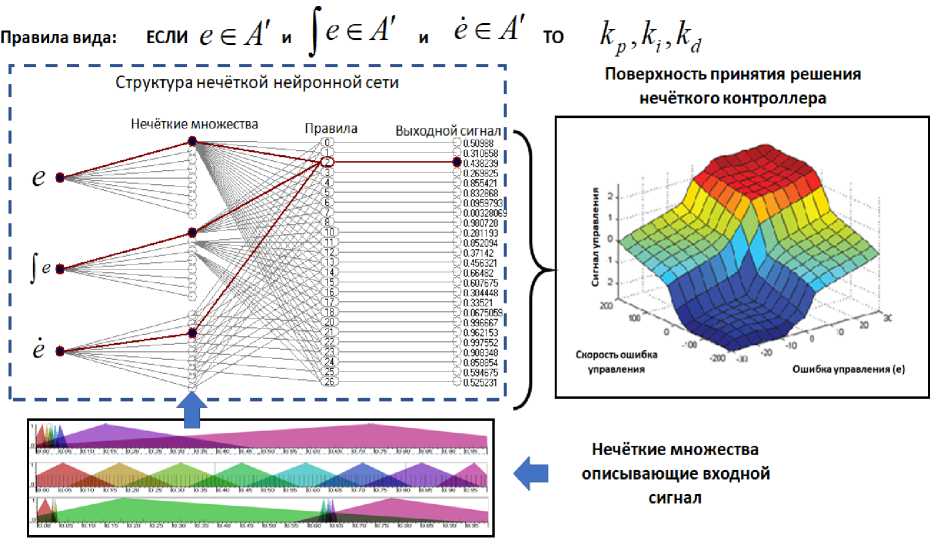
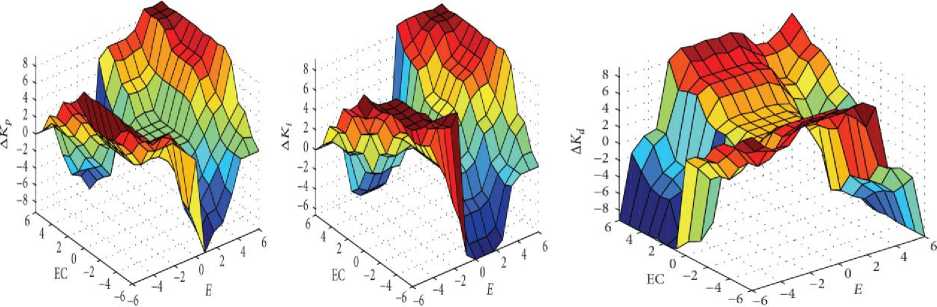
На основе полученных обучающих данных, был спроектирован нечёткий ПИД регулятор (далее PID_FC ) для управления вентилем регулировки давления. На рис. 9 представлена структура нечёткой нейронной сети (ННС), реализующая модель нечёткого логического вывода Сугено, представлены нечёткие множества описывающие входные данные об ошибки управления, её скорости и интеграле. На рис. 9 справа, представлена поверхность управляющего воздействия, вырабатываемого нечетким логическим выводом, и иллюстрирующая выходные значения управляющего воздействия нечёткого контроллера изменением параметрами ПИД-регулятора (см. рис. 9,а).
(а)
(б) (в) (г)
Рис. 9. Структура базы знаний в виде структуры нечёткой нейронной сети, вид функций принадлежности и поверхности управляющего нечеткого вывода НР (а); Функции принадлежности для Кр ;(б) Функции принадлежности для K, (в);) Функции принадлежности для KD (г)
Как правило, разные значения ошибки управления e и скорости изменения ошибки ec требуют разных настроек параметров ПИД-регулятора. Цель разработки нечеткого ПИД-регулятора состоит в том, чтобы значительно улучшить точность регулирования в установившемся режиме без слишком большой потери динамических характеристик. По этим причинам разработаны нечеткие правила управления. Например, правила настройки и лингвистическое описание параметра KD приведены в Табл. 1.
Таблица 1: Таблица правил нечеткого управления для параметра KD
|
е |
NB |
NM |
NS |
ес Z0 |
PS |
РМ |
РВ |
|
NB |
РВ |
РМ |
РВ |
РВ |
РВ |
Z |
NB |
|
NM |
РМ |
PS |
РМ |
РМ |
РМ |
NS |
NB |
|
NS |
PS |
Z |
PS |
PS |
PS |
NM |
NB |
|
PS |
NB |
NB |
PS |
PS |
PS |
Z |
PS |
|
РМ |
NB |
NS |
РМ |
РМ |
РМ |
PS |
РМ |
|
РВ |
NB |
Z |
РВ |
РВ |
РВ |
РМ |
РВ |
Аналогичные правила предназначены для других параметров.
Рисунок 9, б-г иллюстрирует настройки MATLAB правил нечеткого управления коэффициентов усиления нечеткого ПИД-регулятора.
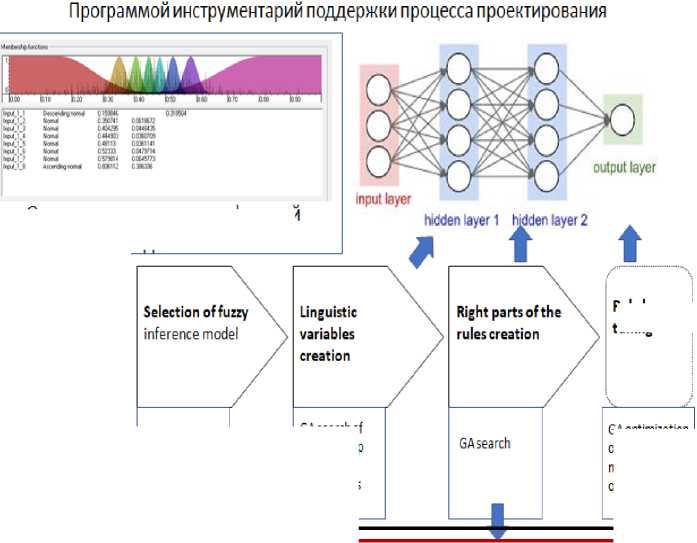
С точки зрения программной инженерии структурно БЗ реализована структурным типом данных и ее размер зависит от количества входных и выходных переменных, количества функций принадлежности лингвистических переменных и содержащейся в ней числа продукционных правил. Применительно к данной задачи были установлены по 8 нечётких множеств для каждой входной переменной (рис. 10).
Технология проектирования интеллектуальных систем управления на основе мягких вычислений
Запись действий оператора при: 1.3а грузке азота 2. Охлаждении экранов
-
3. Охлаждении тоководов
-
4. Испытании
магнитного
элемента
-Mamdani
-Sugeno vWWWWW
-Tsukamoto
GAsearch of membership functions parameters
Mathematical model of control object or physical object
GA optimization or neural network optimization
Оптимальныепараметры функции
_______ принадлежности _______
Teaching signal creation

Rule base tuning
Встраиваемый и нтеллектуальный регулятор в TANGO Control
Оптимальная структура нечёткой
нейронной сети для задач управления
Рис. 10. Технология проектирования ИСУ и взаимодействие с Tango Control
Структурно Оптимизатор баз знаний (ОБЗ) на мягких вычислениях состоит из взаимосвязанных генетических алгоритмов (ГА1, ГА2, ГА3), оптимизирующих отдельные компоненты БЗ (рис.8) и содержит следующие шаги алгоритма оптимизации:
Шаг 1: Выбор модели нечёткого вывода. На первом этапе необходимо установить входные и выходные переменные в ННС – для управление ПИД-регулятором ошибка, скорость ошибки и её интегральной составляющая. Выходными переменными являются значения коэффициентов усиления (kр , k , k ). В качестве модели нечёткого вывода возможно применять модели нечеткого вывода Сугено, Мамдани, и т.д.). В данном примере используется модель нечёткого вывода Сугено.
Шаг 2: Создание лингвистических переменных. С помощью ГА1 определяется оптимальное число функций принадлежности для каждой входной лингвистической переменной, а также выбирается оптимальная форма представления ее функций принадлежности (треугольная, Гауссовская и т.д.). При этом, на основе обучающего сигнала формируется оптимальная структура первого слоя нейронной сети
Шаг 3: Создание базы правил. На данном этапе используется специальный алгоритм отбора наиболее «робастных правил» в соответствии с заданными критериями качества.
Шаг 4: Оптимизация базы правил. С помощью ГА2 оптимизируются правые части правил БЗ. На данном этапе находится решение, близкое к глобальному оптимуму (минимум ошибки аппроксимации ОС). С помощью следующего шага 5 это решение может быть локально улучшено.
Шаг 5: Настройка базы правил. С помощью ГА3 оптимизируются левые и правые части правил БЗ, т.е. подбираются оптимальные параметры функций принадлежности входных/выходных переменных (с точки зрения заданной функции пригодности ГА).
Следует отметить, что также реализовано дистанционное подключение к ОУ по средствам вычислительной инфраструктуры ОИЯИ, для получения ОС, удалённой оптимизации баз правил, обновления баз знаний.
В данном процессе оптимизации используются различные функции пригодности, в частности, расход азота, температурное отклонение магнитов и отклонение давления в накопительной ёмкости азота (шаги 5-1, 5-2 на рис. 11). Также на данном этапе возможно настроить БЗ с помощью традиционного метода обратного распространения ошибки. Возможно использование как математического моделирования, для получения оптимальных траекторий и обучению offline , так, например, как в рассматриваемом примере, реальный сигнал, полученный с датчиков (давление и объем азота) системы и на основе обработанных траекторий поведения оператора (см. шаг 5-3 на рис. 11).
Результатом аппроксимации обучающего сигнала (ОС) является построенная БЗ нечеткого регулятора в виде нечеткой нейронной сети (рис. 10 и 11), включающая 254правила и оптимально сформированные параметры функции принадлежности (ФП) входных и выходных переменных НР (рис. 9).
Этап проектирования БЗ является первым этапом обобщенной технологии проектирования робастных ИСУ на основе квантовых и мягких вычислений [19-20] (см. рис. 8). При этом данный этап позволяет работать как с реальным объектом управления, так и с его моделями; таким образом, реализуется принцип компенсации сложности и неполноты описания ОУ новыми видами интеллектуальных вычислений, которые закладываются при формировании базы знаний.
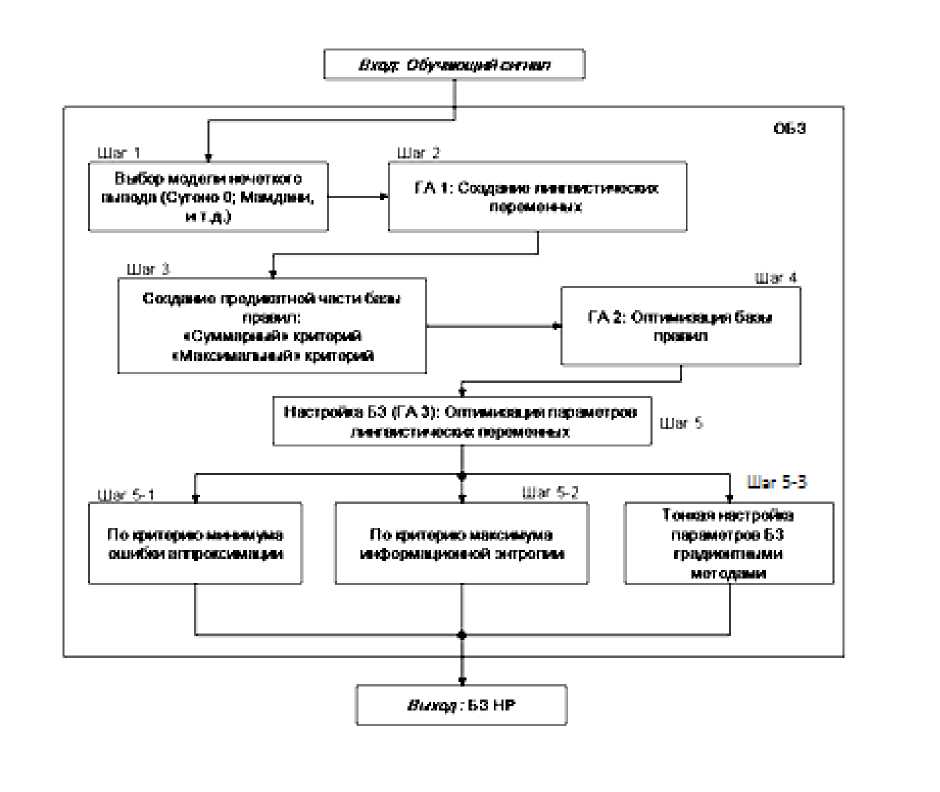
Рис. 11. Структура ОБЗ и шаги оптимизации БЗ
Рассмотрим кратко вопрос об эффективности разработанного интеллектуального инструментария ( Computational Intelligence Toolkit – CIT ).В рамках эксперимента проводился этап азотного и гелиевого охлаждения сверхпроводящего магнита, тестирование магнита при охлаждении токовводов и экранов. Таким образом, реализована проверка корректности работы всех подсистем и программного обеспечения ИСУ встраиваемых TANGOCONTROL .
В качестве примеров, иллюстрирующих работу системы представлены две ситуации управления: режим азотного охлаждения и режим охлаждения токовводов и экранов.
Результаты проведённых исследований. Ситуация управления 1: режим азотного охлаждения.
Рассмотрим результаты проведённых исследований.
На рисунке 12 представлен уровень давления (бар) при азотном охлаждении. Целевым значением является 1.17 бар. Видно, что стабилизировать рост давления в сборнике достаточно просто и этой задачей все регуляторы справляются.
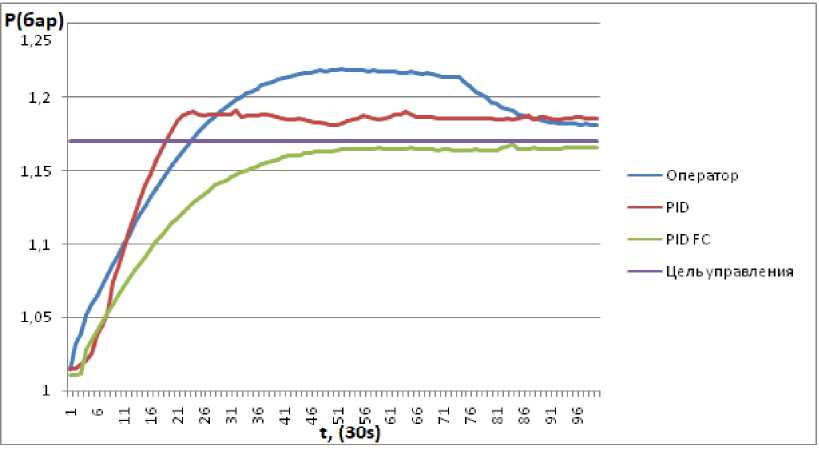
Рис. 12. Давление в азотном сборнике при азотном охлаждении
Однако, при этом важно выбрать оптимальное управление для уменьшения расхода полезного ресурса – азота. Автоматическое управление, за счет непрерывного управления демонстрирует более эффективное использование полезного ресурса (рис. 13).
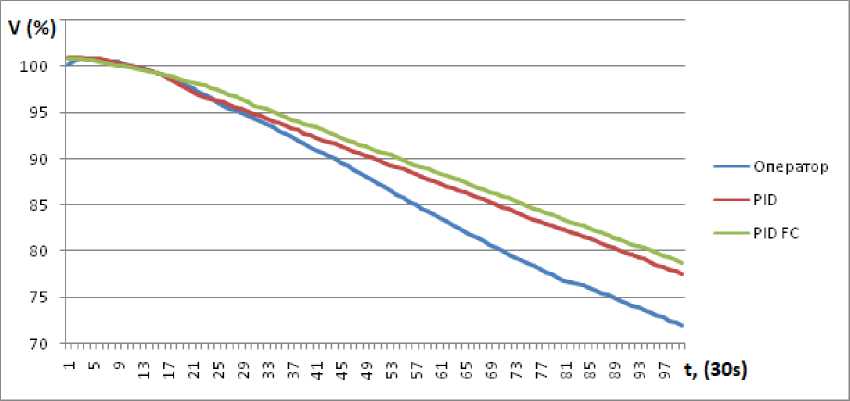
Рис. 13. Расход азота в накопительной ёмкости
На рисунке 14 представлены управляющие траектории ( U в процентах закрытия вентиля) при различных режимах управления.
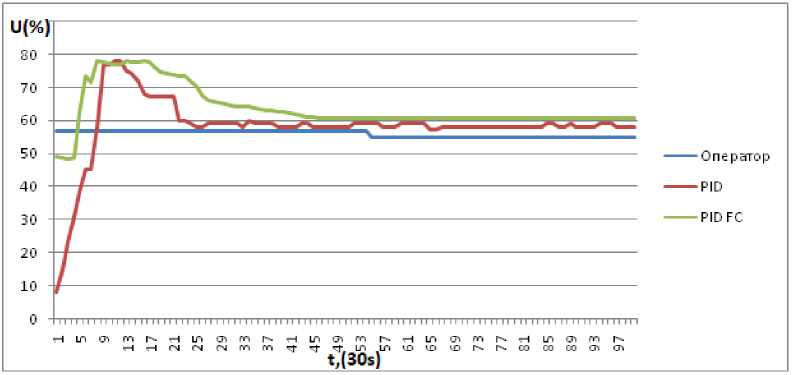
Рис. 14. Управляющее воздействие оператора, V19 ПИД регулятор и нечёткого ПИД регулятора
В качестве оценки качества управления рассмотри сумму абсолютного значения отклонения давления от целевого сигнала
( ∑ e
).
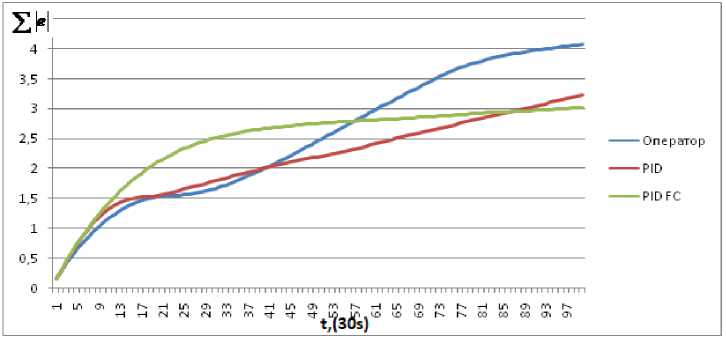
Рис. 15. Оценка качества регуляторов при управлении в режиме азотного охлаждения
Рассмотрим вторую ситуацию управления.
Ситуация 2: режим охлаждения тоководов и экранов
Данная ситуация характеризуется срывами давления (резкое проседание), связанными с нагревом тоководов при уменьшении скорости прокачки азота. Также в даннойситуации хорошо прослеживается асинхронность системы – резкий спад давления и медленное охлаждение СП магнита. Целевым значением давления является величина в 1.24 бар.
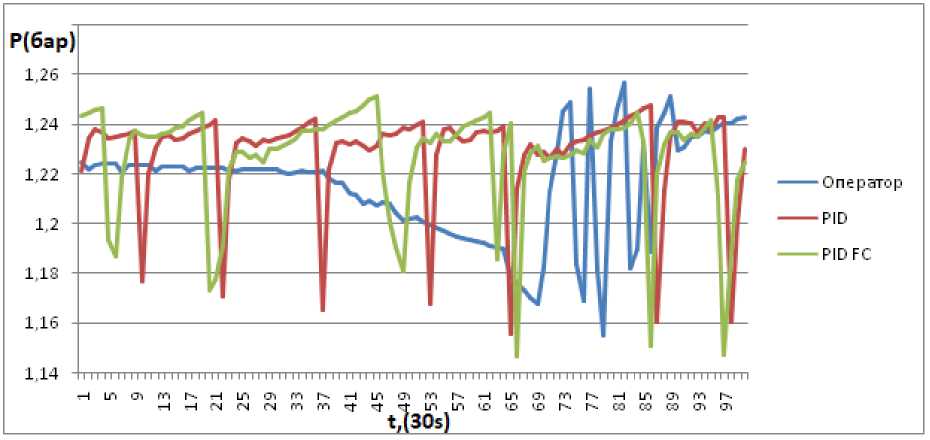
Рис. 16. Давление в азотном зборнике, при охлаждении токовводов и экранов
На рисунке 17 представлен участок работы системы, где оператор установил определённое положение заслонки вентиля, однако произошел срыв давления, который привёл к достаточно длительной стабилизации.
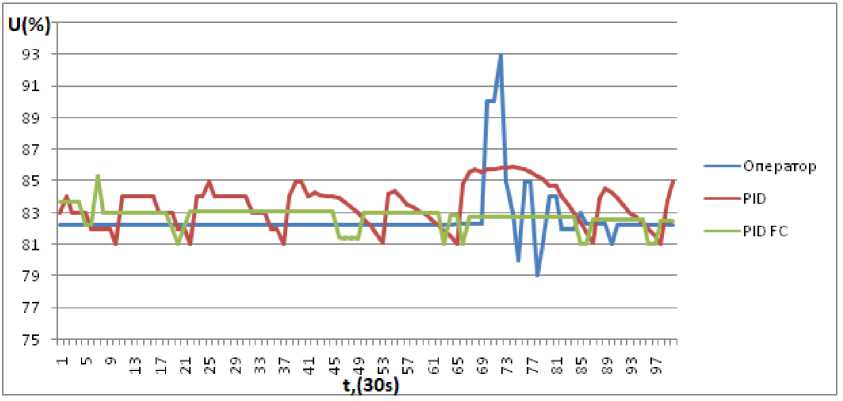
Рис. 17. Управляющее воздействие оператора, V19 ПИД регулятор и нечёткого ПИД регулятора в режиме тестирования СП магнитов
На рисунке 18 представлен график расхода азота в различных режимах управления. Рисунок 19 иллюстрирует отклонение от заданного уровня давления в системе при разных режимах управления.
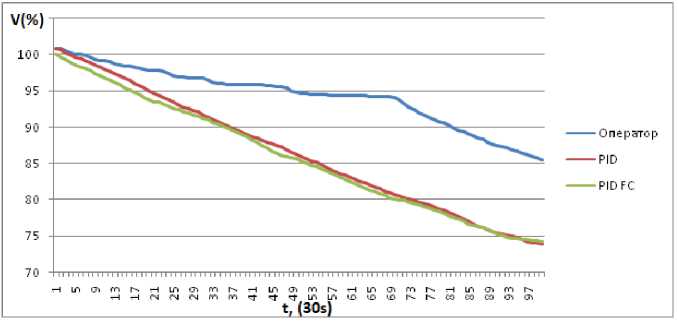
Рис. 18. Расход азота в накопительной ёмкости при тестировании СП магнитов
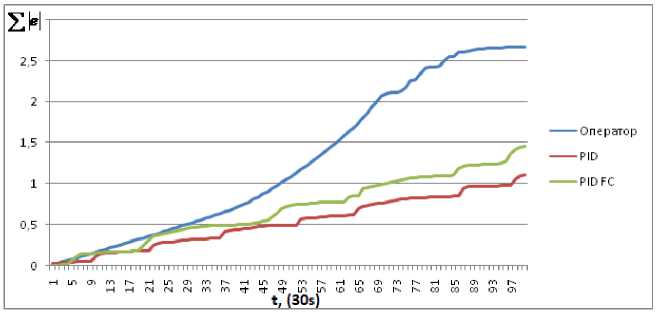
Рис. 19. Оценка качества регуляторов при тестировании СП магнитов
Важно отметить, что при проведении испытаний магнита под нагрузкой важным является именно стабилизация давления, поэтому ключевым критерием оценки качества является именно отклонение давления от целевого значения.
Анализ результатов исследований
Показателями качества процесса управления (рис. 18), определяемые непосредственно по переходной характеристике являются:
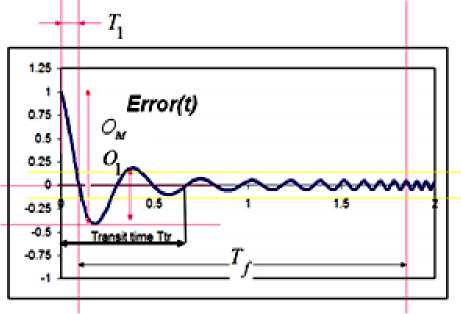
Рис. 20. Показатели качества переходного процесса
T
T выполнение = 1 —L; Tf ( const .) > Tx ;
1 : быстродействие: f
O, выполнение = 1
O : 1
1 перерегулирование:
- O L; o m ( const .) > O1;
OM
P = 1 -
A s
dt
; As ( const .);
Сложность реализации управления: ^ ^
В таблице 3 и 4 представлены значения данных показателей для проведённых экспериментов.
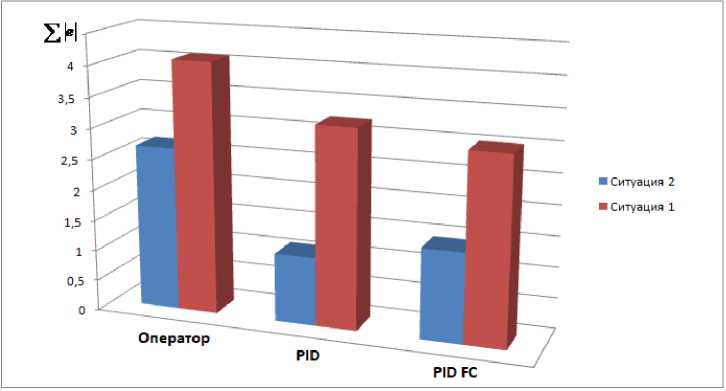
Рис. 21. Сравнение качества управления по сумме абсолютной ошибки
Таблица 3. Сравнение критериев качества переходного процесса в азотном режиме охлаждения
|
Перерегулирова ние |
Быстродейств ие |
Сложность управления |
|
|
Операт ор |
0.048 |
0.73 |
0.2 |
|
PID |
0.021 |
0.79 |
3 |
|
PID FC |
0.1 |
0.43 |
1.946 |
Таблица 4. Сравнение критериев качества переходного процесса в гелиевом грежиме охлажения
|
Перерегулирован ие |
Быстродейств ие |
Сложность управления |
|
|
Операт ор |
0.017 |
0.25 |
1.5 |
|
PID |
0.008 |
0.55 |
0.94 |
|
PID FC |
0.011 |
0.6 |
0.71 |
Результаты проведённых исследований на рис 21 показывают, что FC обладают меньшей сложностью управления и низким уровнем перерегулирования. Также FCэффективнее с точки зрения расхода азота.
Заключение
Применяемый метод для решения поставленной задачи позволил повысить качество управления в автоматическом режиме, существенно уменьшить расход азота и поддерживать на требуемом уровне давление в контуре.
Результаты подтверждают, что разработанный инструментарий, основанный на мягких вычислениях, является эффективным инструментом для извлечения объективной БЗ НК (не зависящей от субъективных знаний эксперта) из реальных физически измеряемых сигналов управления. Технология базируется на объективных физических и механических законах, описывающих динамическое поведение объекта управления.
Подход с применением разработанного программного продукта в виде ОБЗ позволяет:
-
(1 ) осуществить принцип проектирования оптимальной ИСУ с максимальным уровнем надежности и управляемости сложным ОУ в условиях неопределенности исходной информации;
-
2) сократить до требуемого минимума необходимое количество датчиков сбора и передачи информации, как в контуре управления, так и в измерительной системе без потери точности и качества управления.
-
3) эфективно применяется при проектировании ИСУ для плохоформализованных и слабоструктурированных объектов управления, извлекая знания непосредственно из сигналов с реального физического объекта.
В рамках межлабораторного проекта был разработан и аппробирован программный инструментарий позволяющий дистанционно настраивать различные объекты управления при этом используя реальные данные полученные непостредственно с датчиков системы.
Усилить вывода о наличии механизма обучения и адаптации, связь с квантовым регулятором и роль достижения робастного управления.
Список литературы Интеллектуальная система управления расходом жидкого азота в сборнике криогенной установки контроля СП магнитов: мягкие вычисления
- Brown K., Rothacker, F., Carey, D. C., Iselin Ch. TRANSPORT: A Computer Program for Designing Charge Particle Beam Transport Systems // SLAC-PUB-91 Rev 2, 1977.
- Clout P. The status of system // Proc. of the Third Intern. Conference on Accelerator and Large Experi-mental Physics Control Systems, Germany, 1993.
- Clearwater S., Cleland W. Real-Time Expert System for Trigger Logic-Logic Monitoring // Proc. of the Intern. Conference on Accelerator and Large Experimental Physics Control Systems, Vancouver, B.C., 1989.
- Klein W. B., Westervelt R. T., Luger G. F. A General Purpose Intelligent Control System for Particle Accelerators - Vista Control Systems Inc., Los Alamos, New Mexico 87544, University of New Mexi-co, Albuquerque, New Mexico.
- Klein W. B., Westervelt R. T., Luger G. F., An Architecture for Intelligent Control of Particle Accelerators - Vista Control Systems Inc., Los Alamos, New Mexico 87544, University of New Mexico, Albuquerque, New Mexico 87131.
- Scheinker A., Pang X., Rybarcyk L. Model-independent particle accelerator tuning // Physical Review Special Topics - Accelerators and Beams. 2013. Vol.16. P. 102803. DOI: 16. 10.1103/PhysRevSTAB.16.102803.
- Innovative applications of genetic algorithms to problems in acceleraror physics / Hofler A. et al. // Phys. Rev. ST Accel. Beams, 2013. Vol. 16. P. 010101. DOI: 10.1103/PhysRevSTAB.16.010101.
- Chen J., Wang L., Li W.-M., Gao W.-W. Optimization of magnet sorting in a storage ring using genetic algorithms // Chinese Physics C. 2013. Vol. 37. No.12. P. 127004. DOI: 10.1088/1674-1137/37/12/127004.
- Castelvecch D. Particle physicists turn to AI to cope with CERN’s collision deluge // Nature, 2018. Vol. 557. Pp. 147-148.
- Ramberger S., Russenschuck S. Genetic algorithms for the optimal design of superconducting accelera-tor magnets // EPAC, 1998.
- Pang X., Rybarcyk L. J. Multi-objective particle swarm and genetic algorithm for the optimization of the LANSCE linac operation // Nuclear Instruments and Methods in Physics Research Section A: Ac-celerators, Spectrometers, Detectors and Associated Equipment. 2014. Vol. 741. Pp. 124–129. DOI: 10.1016/j.nima.2013.12.042.
- Yang L., et al. Global optimization of an accelerator lattice using multi-objective genetic algorithm // Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detec-tors and Associated Equipment. 2009. Vol. 609. Pp.50-57. DOI: 10.1016/j.nima.2009.08.027.
- Интеллектуальная система питания и управления на фазотроне ЛЯП ОИЯИ, реализуемая от одного источника при разных токах в электромагнитных линзах / В. И. Каплин [и др.] // Письма в ЭЧАЯ, 2013. Т.10. №1(178). С.94-100.
- Каплин В.И., Карпинский В.Н., Поляков Ю.А. и др. Интеллектуальная система питания и управления группами магнитных элементов ускорителей частиц от нескольких источников МВт-Мощности // Письма в ЭЧАЯ, 2012. Т.9. №3(173). С. 489-494.
- Fiesler, E., Campbell, S. Hybrid neural networks and their application to particle accelerator control // Proc. of the SPIE - The International Society for Optical Engineering, 1999. Vol.3812. Pp.132-142.
- Neural Networks for Modeling and Control of Particle Accelerators / A. Edelen [et al.] // IEEE Transac-tions on Nuclear Science. 2016. Vol 63. No.2. DOI: https://doi.org/10.1109/TNS.2016.254320. Andrianov S. Control of simulation of a particle accelerator as a spatially distributed system //AIP Con-ferenceProceedings. 2015. Vol. 1648. No.1. Pp. 450003. DOI: 10.1063/1.4912662.
- Необходимость применения интеллектуальных систем управления в экспериментальных ядерно-физических комплексах (типа NICA). Ч. I: Проблема нештатных ситуаций / О. И. Бровко [и др.] // Системный анализ в науке и образовании. 2019. № 4. С. 32- 57. URL: http://sanse.ru/download/374.
- Кореньков В. В., Решетников А. Г., Решетников Г. П., Ульянов С. В. Возможности применения сквозных квантовых информационных технологий в интеллектуальных системах управления слабо формализованными физическими объектами (типа комплекс NICA) // Системный анализ в науке и образовании. 2018. № 4. С. 1- 44. URL: http://sanse.ru/download/328.
- Ульянов С. В., Решетников Г. П. Технологии интеллектуальных вычислений. Мягкие и дробные вычисления в интеллектуальном управлении: учебно-методическое пособие. Дубна: ОИЯИ, 2013. 244 с. ISBN 978-5-9530-0379-7.
- Ульянов С. В., Решетников А. Г., Решетников Г. П. Технологии интеллектуальных вычислений. Квантовые вычисления и программирование в самоорганизующихся интеллектуальных системах управления : учебно-методическое пособие. Дубна: ОИЯИ, 2015. 246 с. ISBN 978-5-9530-0422-0.
- Ульянов С. В. Квантовая релятивистская информатика. LAP LAMBERT Academic Publishing, 2014. 400 с.
- Ульянов С. В., Николаева А. В., Решетников А. Г. Интеллектуальные системы управления в непредвиденных ситуациях. Оптимизатор баз знаний на мягких вычислениях. LAP LAMBERT Academic Publishing, 2014. 380 с.
- Ulyanov S. V., et al. Quantum swarm model of self-organization process on quantum fuzzy inference and robust wise control design // Proc. 7th Intern. Conf. Appl. of Fuzzy Systems and Soft Computing (ICAFS’2006). Siegen, Germany. 2006. Рp. 10–19.
- Ulyanov S. V. Self-organizing quantum robust control methods and systems for situations with uncer-tainty and risk. Patent US 8788450 B2, 2014.
- Ulyanov S. V., Reshetnikov A. G., Ryabov N. V. Deep machine learning and pattern/face recognition based on quantum neural networks and quantum genetic algorithm // The 8th International Conference "Distributed Computing and Grid-technologies in Science and Education" JINR, Dubna, September 13, 2018.
