Интеллектуальное когнитивное управление роботизированными социотехническими системами Ч.2: нелинейные модели интеллектуальной робототехники для проекта «Индустрия 4.0»

Автор: Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2021 года.
Бесплатный доступ
Обсуждается развитие новых видов интеллектуальной когнитивной робототехники с учетом возрастающих потребностей в роботах в промышленных / непромышленных сферах (особенно для применения в катастрофических ситуациях типа техногенных аварий или коронавирус) и развития квантовых сквозных ИТ. Промышленная революция «Индустрия 4.0» и третья квантовая революция «Квантовая программная инженерия» предопределили развитие нового направления – интеллектуальное когнитивное управление роботизированными социотехническими системами как основы проекта «Индустрия 5.0». Одной из основных проблем стала необходимость исследования взаимодействия человека-оператора с роботом и перераспределения зон ответственности между роботами в коллективе (толпе – swarm) роботов, человеком – оператором и роботом, а также выявления предельных возможностей допустимой работоспособности (Affordance / Kansei / Kawaii Engineering) роботов в различных проблемно-ориентированных областях. Проведен анализ развития моделей роботизированных социотехнических систем и построения образовательных процессов с нестандартной логикой подготовки ИТ-специалистов нового поколения в условиях стремительного разрыва между образовательными процессами и требованиями к базовым знаний в области кванто-вых сквозных ИТ. Представлена методология, разработанная в МЛИТ ОИЯИ, по подготовки ИТ-специалистов нового поколения для управления физическими экспериментами, квантового интеллектуального управления физическими установками в мегасайнс проектах типа NICA, роботов – беспилотников радиационного контроля и др.
Роботизированные социотехнические производственные системы, Индустрия 4.0, квантовые сквозные ИТ, квантовая программная инженерия, опережающий образовательный процесс с нестандартной логикой подготовки ИТ-специалистов
Короткий адрес: https://sciup.org/14123373
IDR: 14123373 | УДК: 512.6, 517.9, 519.6
Intelligent cognitive control of robotic sociotechnical systems Pt 2: nonlinear model generation of intelligent cognitive robotics for project “Industry 4.0”
The development of new types of intelligent cognitive robotics is discussed, taking into account the growing need for robots in industrial / non-industrial areas (especially for use in catastrophic situations such as industrial accidents or coronavirus) and the development of quantum end-to-end IT. The industrial revolution "Industry 4.0" and the third quantum revolution "Quantum Software Engineering" predetermined the development of a new direction - intelligent cognitive control of robotic sociotechnical systems. One of the main problems was the need to study the interaction of a human operator with a robot and redistribute areas of responsibility between robots in a team (crowd – swarm) of robots, a human operator and a robot, as well as identify the limiting capabilities of permissible performance (Affordance / Kansei / Kawaii Engi-neering) of robots in various problem-oriented areas. An analysis was made of the development of models of robotic sociotechnical systems and the construction of educational processes with non-standard logic for training new generation IT specialists [8,9] in the context of a rapid gap between educational processes and the requirements for basic knowledge in the field of end-to-end quantum IT. The methodology developed at MLIT JINR for the training of new generation IT specialists for managing physical experiments, quantum intelligent control of physical facilities in mega-science projects such as NICA, aerial manipulators and unmanned robots - drones for radiation control, etc. is presented.
Текст научной статьи Интеллектуальное когнитивное управление роботизированными социотехническими системами Ч.2: нелинейные модели интеллектуальной робототехники для проекта «Индустрия 4.0»
For citacion: Ulyanov S. V. Intelligent cognitive control of robotic sociotechnical systems. Pt. 2: Nonlinear model generation of intelligent cognitive robotics for project “Industry 4.0”. System Analysis in Science and Education, 2021;(3):1–43(In Russ). Available from:
Введение: Четвертая промышленная революция «Индустрия 4.0»
Концепция четвертой промышленной революции «Индустрия 4.0» сформулирована в 2016 году Клаусом Швабом (основателем Всемирного экономического форума) в одноименной книге: «Четвертая промышленная революция создает мир, в котором виртуальные и физические производственные системы гибко взаимодействуют друг с другом на глобальном уровне». Однако четвертая промышленная революция «Индустрия 4.0» касается не только умных и подключенных к сети машин и интеллектуальных систем. Сфера ее применения намного шире. Одновременно происходят волны смены новых технологических достижений в разных областях, от секвенирования генов до нанотехнологий, от возобновляемых источников энергии до квантовых вычислений, приводящие к новым технологическим укладам (рис. 1. и 2).
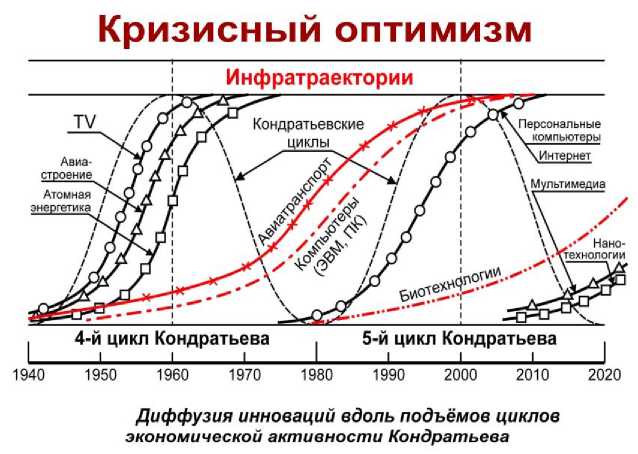
Рис. 1. Волны новых технологических достижений
Технологические уклады

Рис. 2. Волны новых технологических укладов
Именно слияние этих технологий и их взаимодействие в физической, цифровой и биологической областях отличает Четвертую промышленную революцию «Индустрия 4.0» от предыдущих революций.
Примечание . С развитием информационных и коммуникационных технологий (ИКТ), внедрение Интернета вещей (IoT) и Интернета услуг (IoS) в производстве положило начало Индустрии 4.0 в Германии, то есть четвертой промышленной революции, которая превращает сегодняшние предприятия в умные. Параллельно, в Соединенных Штатах «Коалиция за лидерство в интеллектуальном производстве (SMLC, 2011)» работала над новой производственной парадигмой, называемой «интеллектуальное / «умное» производство», которая включает в себя сложную практику создания и применения производственного искусственного интеллекта на основе данных на протяжении всего жизненного цикла производства продукта с широким внедрением передовых технологий зондирования, управления, моделирования и цифровых платформ. В Китае Интернет производственных вещей был исследован с использованием IoT в производстве, и интеллектуальное («умное») производство признано ключевой темой в десятилетнем национальном плане «Сделано в Китае, 2025».
Чтобы правильно оценить условия, при которых может быть достигнута Четвертая промышленная революция «Индустрия 4.0», необходимо проанализировать этапы развития предыдущих трех промышленных революций и как они изменили контуры повседневного мира.
Примечание . Уроки Первой промышленной революции изучают еще в школе. В этом важную роль сыграло изобретение парового двигателя, запатентованное Джеймсом Ваттом в 1769 году. Был задан переход от аграрной экономики к индустриальной. В результате Первая промышленная революция была самой революционной экономической, технологической и социальной трансформацией, которую когда-либо видел мир. Спустя более двух веков 4-я промышленная революция вызвала еще больший интерес (рис. 3).

Рис. 3. История Промышленных революций
Проанализируем кратко эволюцию промышленных революций.
Первая промышленная революция . Произошло это в конце 18 века, в 1784 году, когда пар использовали для производства механической продукции. Изобретение первого механизированного ткацкого станка стало переломным моментом.
Вторая промышленная революция . В 1870 году впервые было внедрено массовое производство электроэнергии. Была изобретена сборочная линия, и рынок продукции промышленного сектора вырос в геометрической прогрессии.
Третья промышленная революция . В 1969 году достижения в области вычислительной техники привели к внедрению математического программирования, открывшему дверь прогрессивной автоматизации на основе мехатроники, робототехники и систем управления с нижним уровнем интеллекта на платформе традиционных регуляторов с «жесткой» логикой и систем со скользящим режимом (с переменной структурой).
Примерно в 2014 году отрасль пережила очередной поворот с появлением «умных предприятий» и интеллектуального онлайн-управления производством. Вернувшись к Швабу и его книге «Индустриальная революция в производстве», заметим, что немецкий экономист предвидел то, что должно было произойти: «Мы находимся в начале революции, которая коренным образом меняет наш образ жизни, работы и взаимоотношений». По своим масштабам, размаху и сложности Четвертая промышленная революция («Индустрия 4.0») не похожа ни на что, что человечество испытывало раньше. В основе отличия находятся три факта, по которым эксперты сходятся во мнении: скорость , масштабы и беспрецедентное взаимное влияние .
Индустрия 4.0 является источником новой революции - широко приветствуемой Четвертой промышленной революции – сочетания передовых производственных технологий и интеллектуальных систем, которые интегрируются с организациями и людьми.
В данной статье рассматриваются основы и взаимосвязи технологий интеллектуального управления роботизированными социотехническими системами, которые стимулируют этот процесс и его ускоряющееся развитие [1].
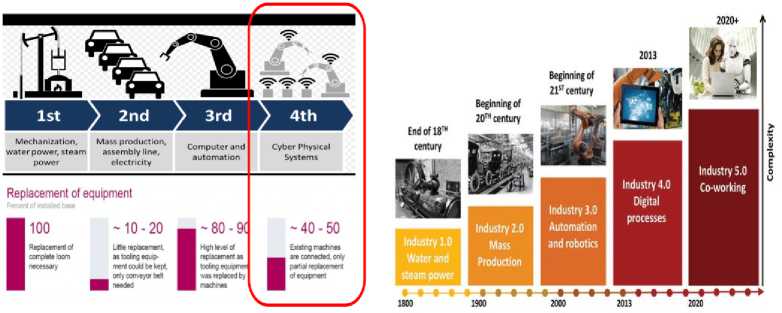
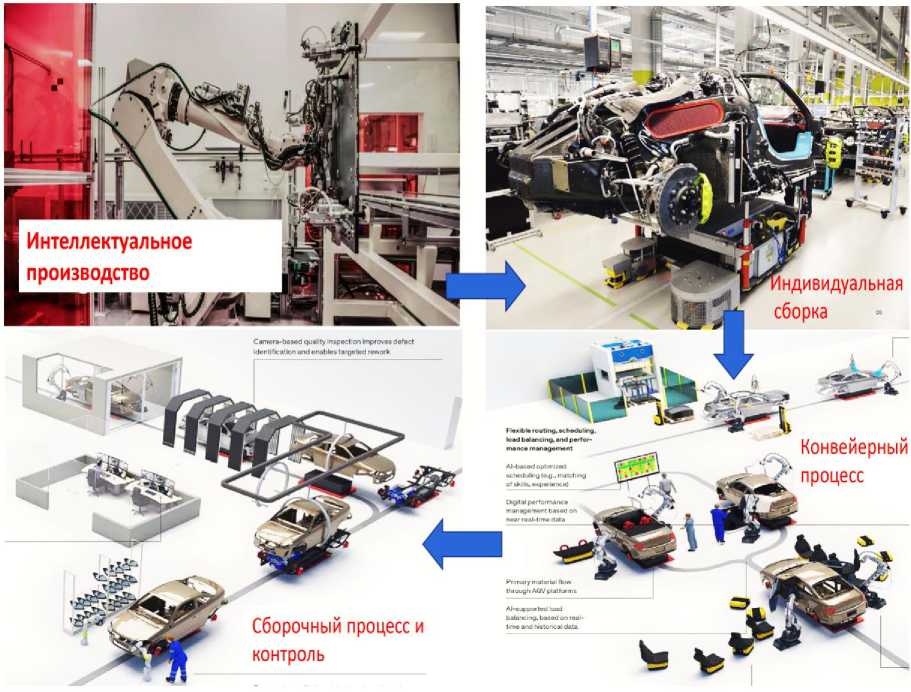
Международный проект «Industrial 4.0 – I4» или «Умное производство» определяет стратегию развития роботизированных социотехнических систем [2-4], в которой киберфизические системы контролируют киберфизические процессы производства и принимают децентрализованные решения. Физические системы становятся Интернетом вещей (IoT), общаясь и взаимодействуя как друг с другом, так и с человеком – оператором в режиме реального времени через беспроводную сеть (рис. 4, а), совершенствуя процессы технологического производства (рис. 4, б) за счет «интеллектуализации» роботизированных социотехнических систем.

(а)
(б)
Рис. 4. Эволюция развития технологий промышленных социотехнических систем
При этом, если для Первой промышленной революции замена оборудования ( Replacement of equipment, loom – ткацкий станок) была 100%, при Второй промышленной революции потребовалось 10-20% (только смена конвейерной ленты), то третья промышленная революция привела к 80-90% смены оборудования (замена инструментальной оснастки на роботы и автоматизацию технологических процессов), а Четвертая промышленная революция вызвала 40-50% частичной смены устаревшего оборудования за счет объединения действующего оборудования на информационном пространстве обмена данными (см. рис. 4).
Таким образом, три упомянутые промышленных революции привели к изменениям парадигмы в области производства: механизация с помощью энергии воды и пара, массовое производство на сборочных линиях и автоматизация с использованием информационных технологий. Однако за последние годы представители промышленности вместе с исследователями и политиками во всем мире все активнее выступали за грядущую четвертую промышленную революцию I4.0 (см. рис. 5).
CPS
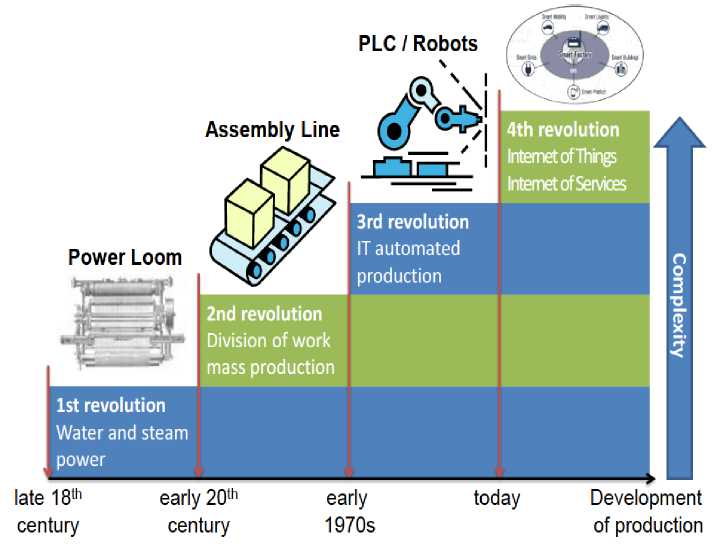
Рис. 5. Развитие четырех промышленных революций
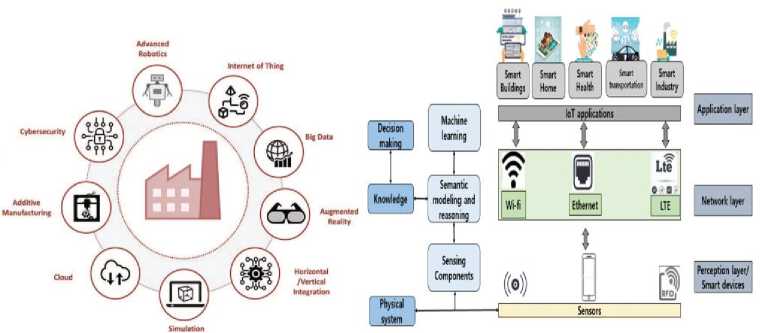
Согласно рис. 5, проект I4.0 представляет собой смену парадигмы от автоматизированного производства к концепции «умного» производства. В этом случае программируемые логические котрол-леры ( Programming Logic Controller – PLC ) и автономные роботы в Третьей промышленной революции заменяются киберфизическими системами ( СyberPhysical System – CPS ), но сложность (complexity) таких систем резко возрастает. В «Индустрия 4.0» физический и виртуальный мир объединяются, и объекты (включая машины и оборудование) оснащены датчиками и исполнительными механизмами. Реализация «умного» производства использует такие концепции, как Интернет вещей, чтобы облегчить это изменение. Эксклюзивная особенность в I4.0, как отмечалось, состоит в том, чтобы удовлетворить индивидуальные требования клиентов с вариантами продукта в очень малых размерах, вплоть до простых единиц.
Доступность всей необходимой информации в режиме реального времени позволит производственной системе удовлетворить требования клиентов без лишних затрат на реконфигурацию сборочной линии или время наладки за счет динамичного бизнеса и инженерных процессов (см. рис. 6).
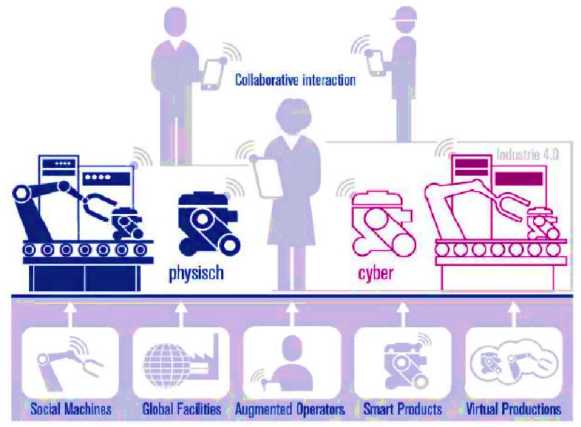
Рис. 6. Структура киберфизической системы (CPS) для «Индустрия 4.0»
В этом контексте «умное» производство и логистика систем могут не только генерировать оптимальных потоков создания ценности для удовлетворения требований в реальном времени, но также создавать новые бизнес-модели, основанные на улучшенном прогнозирующем обслуживании, надежности конструкции продукта и адаптивной логистике. «Индустрия 4.0» (I4.0) направлена на исследования и разработку действий в восьми ключевых областях, чтобы поддержать внедрение ее принципов в промышленности:
-
- стандартизация и эталонная архитектура: для сотрудничества организаций в сетях требуется набор общих стандартов в эталонной архитектуре;
-
- управление сложными системами: для управления системами и продуктами более высокой сложности требуется соответствующая модель;
-
- комплексная широкополосная инфраструктура для промышленности: Интернет вещей требует надежной и быстрой коммуникационной сети инфраструктуры;
-
- безопасность: в связи с тесным взаимодействием человека и машины производственные системы не должны наносить вред людям или окружающей среде. Кроме того, данные и информация требуют авторизации доступа и мер конфиденциальности;
-
- организация и дизайн работы: вместе с оборудованием изменится также окружающая среда и модель рабочих процесса, что предоставит сотрудникам большую свободу и потребует большую степень ответственности;
-
- обучение и непрерывное профессиональное развитие: что касается предыдущей ключевой области, работник должен иметь соответствующую квалификацию и обучение;
-
- нормативно-правовая база: вместе с организационными изменениями, законодательство также должно учитывать новые инновации, особенно положения о конфиденциальности и ответственности;
-
- эффективность использования ресурсов: за счет повышения производительности и эффективности использования ресурсов, потребление сырья и энергии требуется снизить.
Наряду с действиями в ключевых областях производственных компаний необходимо разработать новые бизнес-стратегии для 1 4.0. Сети создания и разделения прибыли / убытков будут тесно связаны с проблемой отдельного клиента. Обязанности и правила конфиденциальности описаны в Соглашении об уровне обслуживания ( SLA ).
Например, правительство Германии продвигает компьютеризацию обрабатывающих производств в своей программе «Индустрия 4.0» ( I 4.0), в то время как в США инициатива развития интеллектуального производства, таких как, например, “ Smart Manufacturing Leadership Coalition ( SMLC) “ продвигает и способствует широкому внедрению технологий производственного интеллекта. Другие крупные страны-производители, такие как Япония и Корея, также разработали национальные программы по “ Smart Manufacturing ”.
Четвертая промышленная революция характеризуется внедрением в производство концепций Интернета вещей ( IoT) и Интернет-услуг, что позволяет «умным» предприятиям иметь вертикально и горизонтально интегрированные производственные системы. В этом мире требуются очень гибкие процессы, которые можно менять «на лету» и позволяют индивидуализировать массовое производство. Варианты определяются самостоятельно через элементы, доставляющие собственные производственные данные на интеллектуальные машины, которые «осведомлены» об окружающей среде, обмениваются информацией и контролируют процессы производства и сами логистики. Данные собираются на протяжении всего жизненного цикла в больших количествах и хранятся децентрализовано, чтобы обеспечить возможность принятия локальных решений, но при этом они остаются прозрачными для обмена с партнерами. Чтобы реализовать это видение, пять элементов, таких как машины, системы хранения и утилиты, должны иметь возможность обмениваться информацией, а также действовать и управлять друг другом автономно. Такие системы называются кибер-физическими системами ( cyber-physical system - CPS).
Например, создана киберфизическая производственная система с киберфизической системой логистики (CPLS – cyber-physical logistic system) для повышения эффективности энергосбережения производства в этом сценарии с множеством вариантов продуктов и не полностью выровненных и синхронизированных производственных линий. Целью CPLS является повышение гибкости за счет автономных решений и обеспечение сокращения запасов за счет автономного решения ошибок в реальном времени. Например, прогон молока, ориентированный на спрос, основан на информации о заполненности мест доставки и получения. Кроме того, были представлены киберфизические носители нагрузки (CP-LC) с датчиками для определения своего местоположения и отслеживания условий окружающей среды (например, температуры, ускорения), которые влияют на компоненты (см. рис. 7).
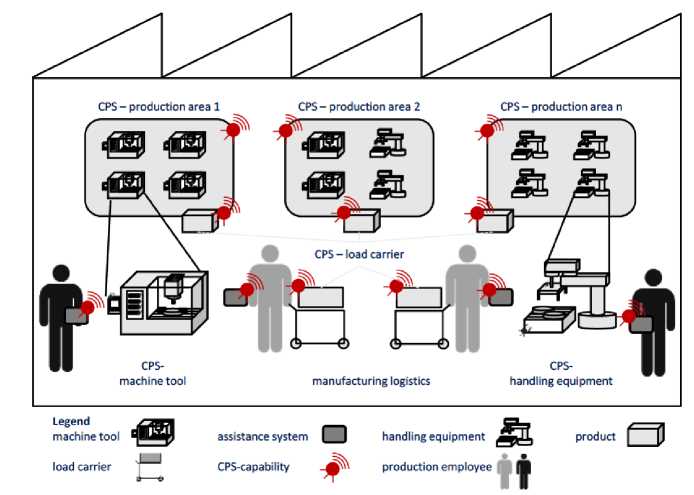
Рис. 7. Сценарий киберфизической производственной системы
Сокращение циклов обработки молока дает ощутимые преимущества для производительности компании, работающей с кейсами, потому что у них больше времени для выполнения своей основной деятельности в вводе в эксплуатацию, отгрузке и хранении. Согласно модели, основанной на текущей пропускной способности электрического поезда, количество циклов может быть уменьшено приблизительно 58 68%, в то время как количество ведомых петель в циклах может быть уменьшено примерно на 27%.
«Умное» производство отличается от чистой автоматизации предыдущих инициатив. Для фабрики смарт-робототехники в контексте I4.0 и IoT , где рынок требует высокой производительности, сотрудничество между людьми и роботами является ключевым. Работники играют важную роль либо в руководстве, либо в соавторстве, а в тех случаях, когда роботы не обучены - так называемые ко-боты (коллаборативные роботы) – являются специальной областью исследований, и несколько компаний уже представили свое видение таких систем.
Постоянное присутствие человека в рабочей зоне робота или рядом с ним вынуждает компании переосмыслить, как организовано рабочее пространство робота и используется совместно с его кол-легами-людьми. Традиционно рабочая зона роботов была ограждена и запрещена для людей во время операции из соображений безопасности (см. рис. 8.).
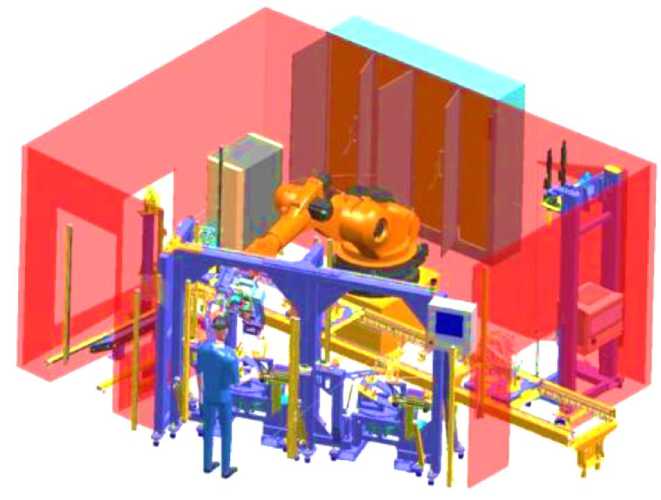
Рис. 8. Традиционное решение защиты человека – оператора
Роботизированная CPS может обеспечить необходимое взаимодействий между человеком и роботом с характеристиками динамического планирования задач, активным предотвращением столкновений и адаптивным управлением роботом. Люди являются частью проекта CPS , в котором человек дает роботам инструкции с помощью речи, знаков или жестов рук во время совместной обработки, сборки, упаковки, обработки пищевых продуктов или других задач. Все эти промышленные задачи делают акцент на текущих исследованиях роботов, наделенных искусственным интеллектом для работы роботами с большой полезной нагрузкой. Подход состоит в том, чтобы продемонстрировать безопасное промежуточное взаимодействие между роботами человека ( HRC ) без каких-либо ограждений. Для того, чтобы реализовать это, необходимо реализовать дополнительные меры безопасности и защиты для совместной роботизированной киберфизической системы ( CPS ) (см. рис. 9).
Человеческий фактор хорошо связан с помощью различных адаптивных технологий, например, слежение за положением человека и параметры безопасного расстояния являются важными факторами для безопасности рабочих в роботизированной CPS . Роботизированная CPS – это высокоавтоматизированная система, поскольку она устраняет границы между составными элементами и поддерживает их рабочее взаимодействие; таким образом, действительно достигается разработка интеллектуальной системы с людьми в контуре управления, задействованная подключенными объектами, которые способны ощущать, интерпретировать и реагировать на изменяющиеся события.
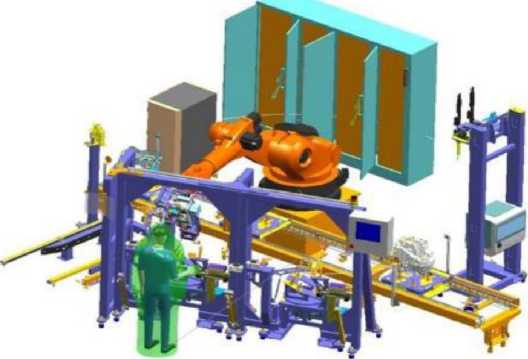
Рис. 9. Решение для защиты CPS
Рассмотрим кратко технологические особенности разработки «умных» производств и роль информационных технологий при проектировании киберфизических роботизированных социотехниче-ских систем в «Индустрия 4.0» и отметим некоторые сопутствующие особенности Четвертой промышленной революции.
Роботизированные социотехнические системы и нелинейные модели интеллектуальной когнитивной робототехники
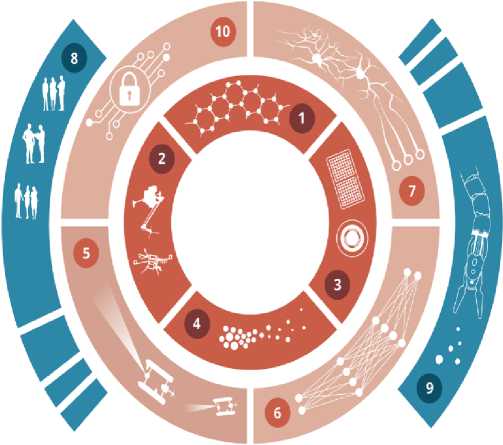
На основе анализа полученных отзывов и материалов от многочисленных коллективов разработчиков-исследователей в области робототехники онлайн-группа экспертов составила окончательный список 30 наиболее важных тем и направлений исследований. Далее они были сгруппированы в 10 основных проблем (рис. 10), которые могут иметь серьезные прорывы, значимые исследования и / или социально-экономические последствия в следующие 5-10 лет [1, 5].
0 New Materials and Fabrication Schemes

Biohybrid and
Bioinspired Robots
Power and Energy
Robot Swarms
0 Navigation and Exploration
Al for Robotics
Brain-Computer Interfaces
Social
Interaction
Medical
Robotics
Robot Ethics and Security
e о
e о
Рис. 10. Десять основных задач научной робототехники
При этом отмечен достигнутый прогресс во многих аспектах робототехники - от микромашин для биомедицины до крупномасштабных систем для робототехники и от роботов для космического пространства до тех, кто занимается глубоководными исследованиями. Наблюдается эволюция «мягких» роботов и то, как новые материалы и схемы изготовления привели к деформируемым приводам, которые являются совместимыми, универсальными и самовосстанавливающимися. Существует множество примеров биоинспирированных конструкций, от прыгающего робота с регулируемой мощностью, ловкость и мощность которого приближены к таковым как у галаго (животное с самой высокой способностью к вертикальному прыжку), до биомиметической роботизированной платформы для изучения специализации полета летучих мышей и биороботический липкий диск для подводных автостопов, вдохновленных реморами-присосками.
Отмечено 10-летие операционной системы роботов (ROS), промежуточного программного обеспечения для робототехники с открытым исходным кодом, которое создает большие успехи в реализации своей миссии по обеспечению энергией мировых роботов, от задач космических роботов до автономного вождения, промышленной сборки и хирургии. Сфера робототехники обширна и охватывает многие базовые и смежные технологические области. Выявление этих проблем было сложной задачей, и есть много не перечисленных подтем, которые одинаково важны для будущего развития.
Таким образом, приведенный выше на рис. 10 список не является исчерпывающим [1, 6-8].
Из 10 основных проблем, перечисленных здесь, первые семь представляют собой базовые технологии, которые оказывают более широкое влияние на все области применения робототехники [6-12]. Для решения следующих двух задач в число прикладных областей развития включили социальную робототехнику и медицинскую робототехнику, чтобы подчеркнуть существенное воздействие на общество и здоровье, которое они принесут. Наконец, последняя проблема связана с ответственными инновациями и с тем, как следует тщательно учитывать этику и безопасность при дальнейшем развитии технологии.
Технологии интеллектуальных когнитивных вычислений находятся в стадии своего становления для создания требуемой платформы программно-алгоритмической и аппаратной поддержки таких социально и экономически ответственных роботизированных социотехнических систем и разработки соответствующих учебно-образовательных университетских программ для подготовки нового поколения ИТ-специалистов. Традиционный подход к построению робототехнических систем на основе проектирования кинематики и динамики с применением, например, уравнений Лагранжа 2-го рода с многочисленными ограничениями и оптимизация интеллектуальных регуляторов на основе методов оптимального управления является необходимым, но недостаточно для построения интеллектуальных когнитивных роботов. Для повышения мобильности, адаптивности и работоспособности необходимо вводить (дополнительно к уровню обучения) когнитивный уровень и уровень коммуникации с внешней средой [8,12].
В данной работе рассматривается сложившаяся ситуация с разработкой новых видов аппаратной реализации сложных видов нелинейных моделей роботизированных социотехнических систем, взаимодействующих с человеком-оператором и антропоморфных (автономных и коллективов) роботов с наделенными новыми когнитивными способностями качествами (такими как эмоционального когнитивного управления, обмена информацией и способностью оценивать ситуацию поведения внешней среды и мн. др.)
Гетерогенные роботизированные комплексы
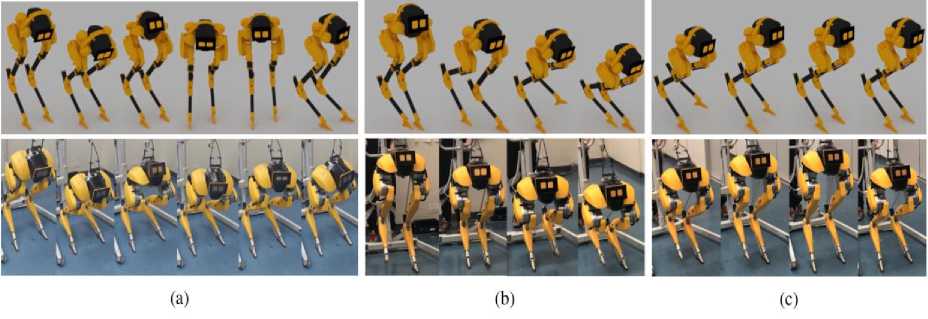
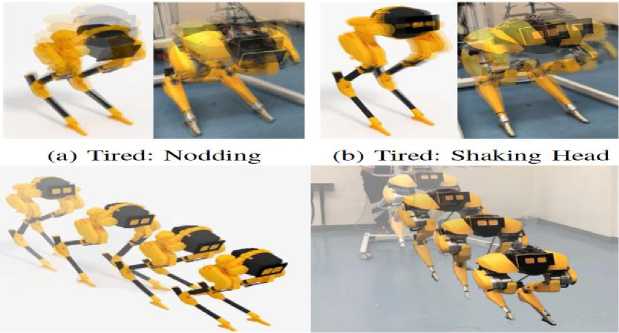
На рис. 11 и 12 приведены примеры [1, 8, 12-37] разрабатываемых существенно нелинейных моделей гетерогенных роботизированных комплексов в рамках проектов типа DARPA и мн. др.

—_
Finetune Finetune Finetune Finetune Finetune

(a)
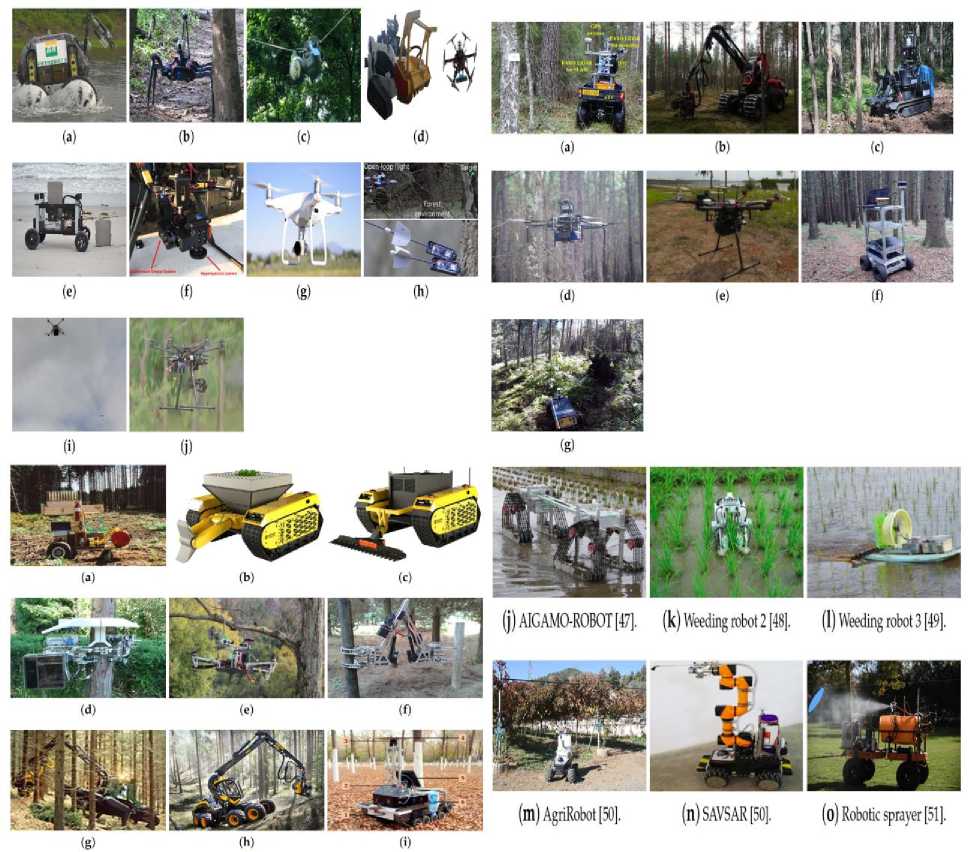
(j)AIGAMO-ROBOT[47]. (к) Weeding robot 2 № (I) Weeding robot 3 [49].
(m) AgriRobot [50]. (n) SAVSAR [50J. (o) Robotic sprayer [51].
Mr•irMJWlwl
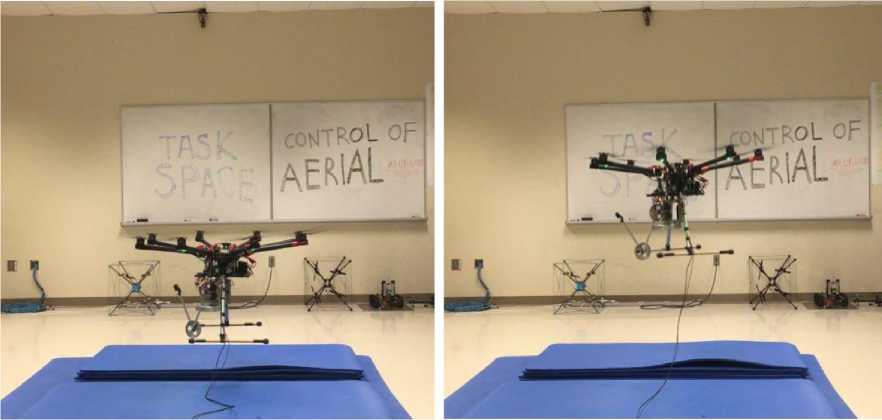
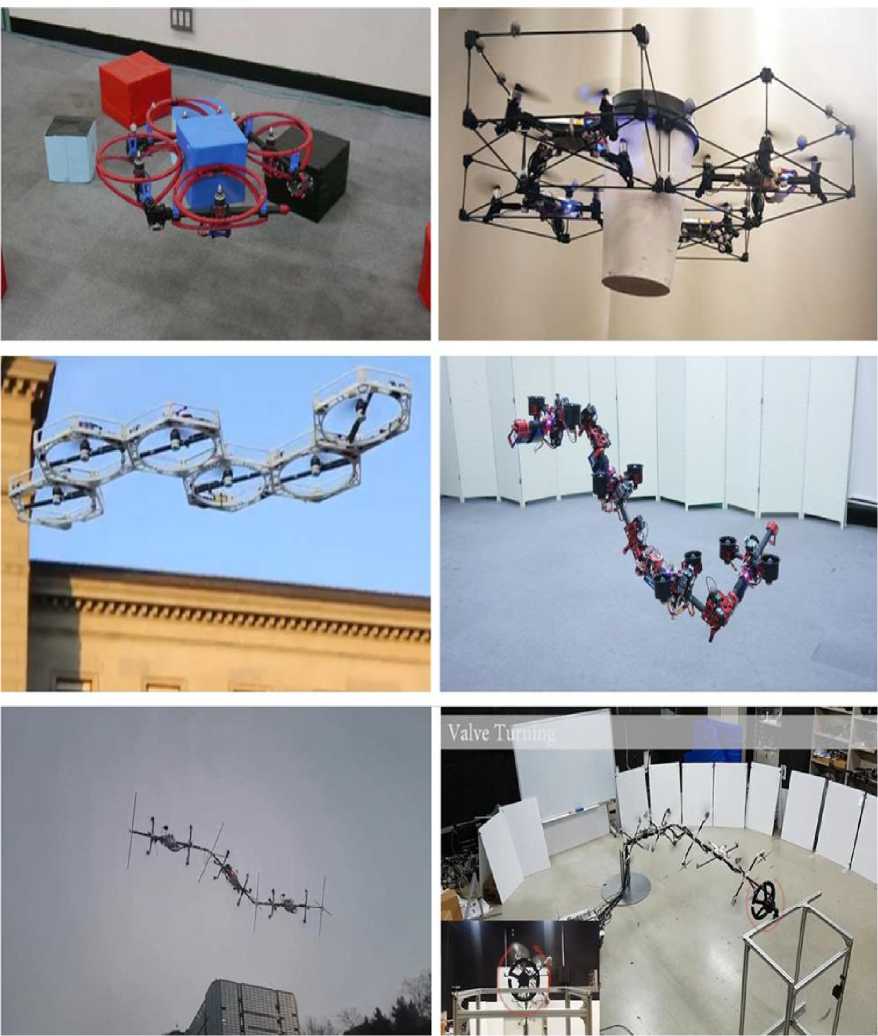


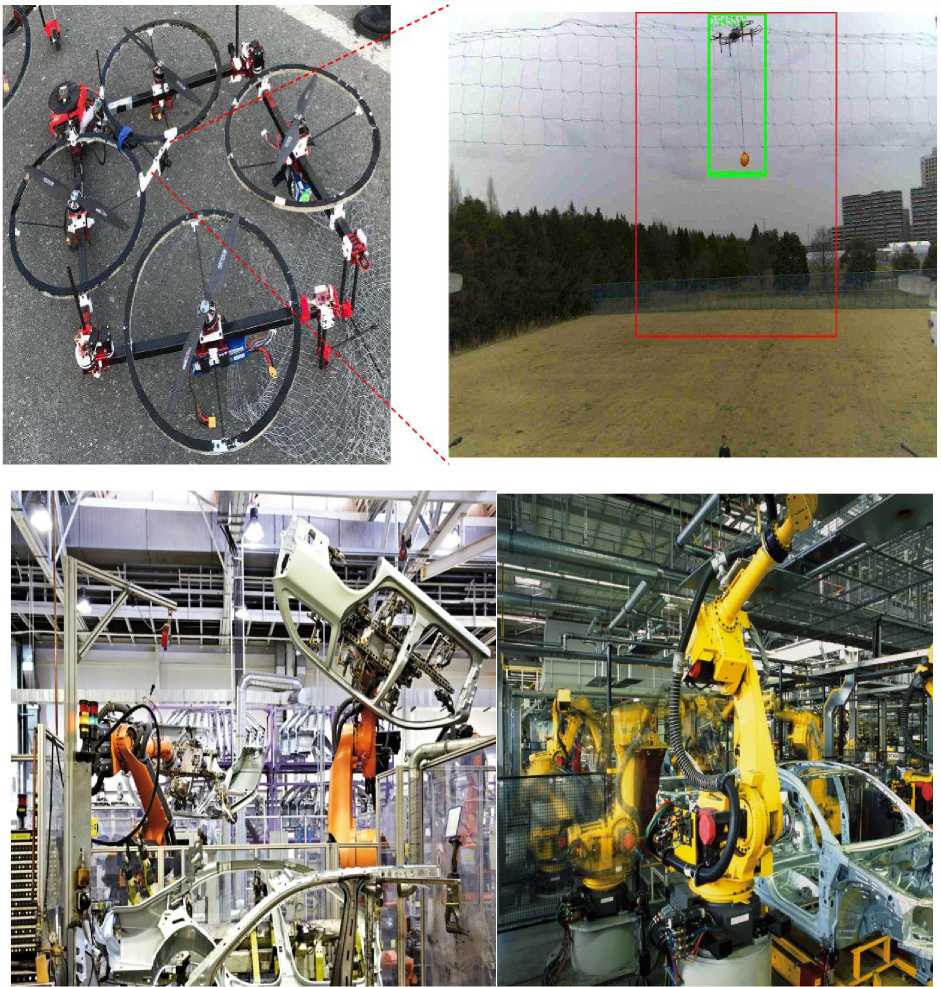

Рис. 11. Примеры промышленных роботов с приложениями в RAD: (а) робот Unimate с полярной конфигурацией, (б) шарнирный робот в литейном цехе, (в) портальный робот, (г ) Настольный цилиндрический робот-манипулятор микропланшетов для автоматизации лаборатории, (e) робот-манипулятор для сборки с селективным соответствием, (f дельта-робот Codian Robotics, (g) прототип робота TriMule®, (h) Колесный мобильный робот на сборочно-разборной линии мехатроники
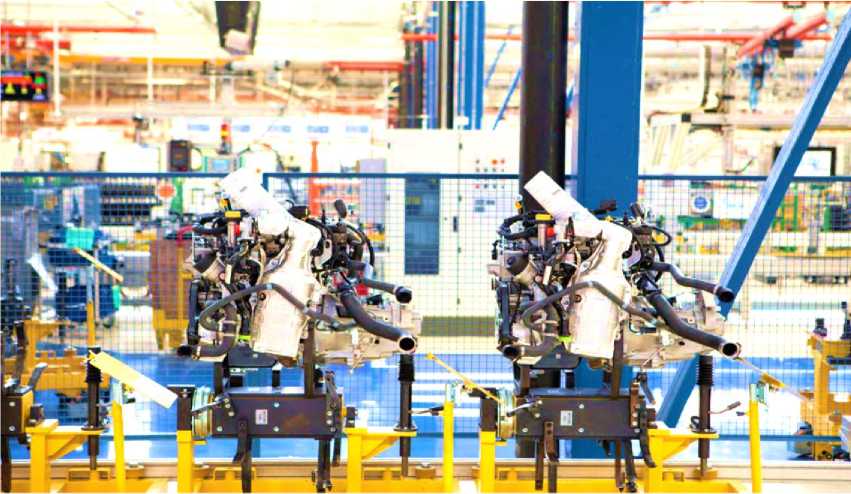
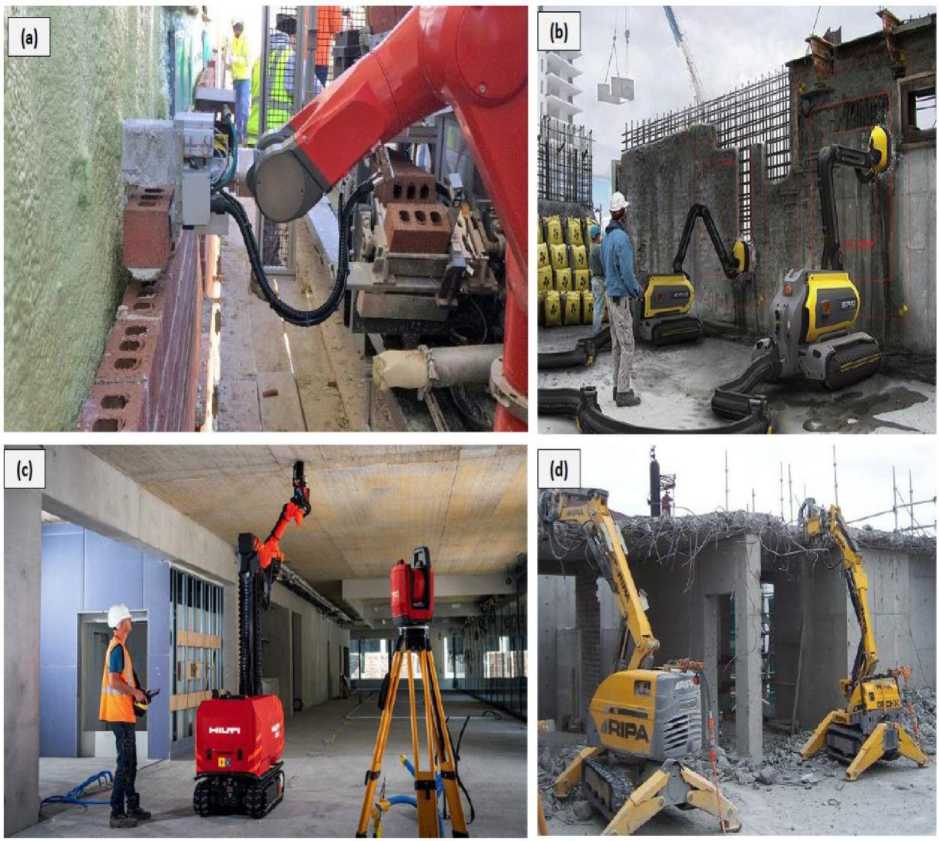
Рис. 11. Примеры платформ сложных гетерогенных роботизированных комплексов

(а)
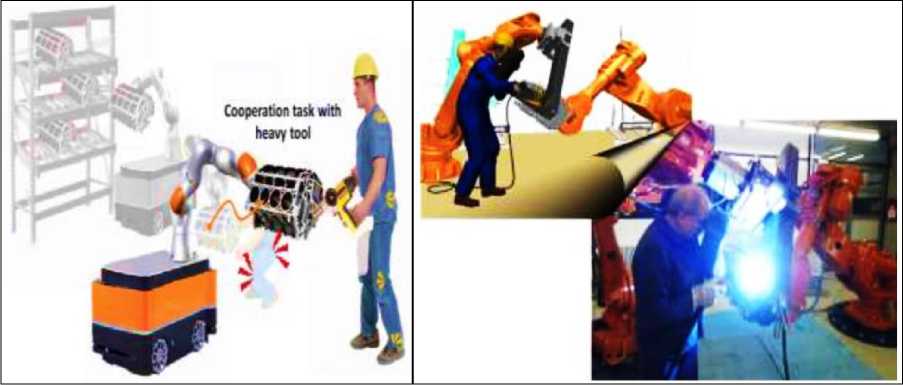
(б)
Рис. 12. Примеры взаимодействия человека-оператора с автономными роботами
Примеры применения (нижний на рис. 11) робототехники в строительстве зданий: (а) Фасадная установка, связанная с архитектурой ( Malewar 2017); b) наложение слоя – бетон для стен жесткости, связанный со структурой ( Building-Design-Construction 2013); (c) Внутренняя планировка и связанные с инженерными системами, BIM -13 включенный мобильный робот для сверления потолков ( Hilti-Jaibot ); (d) Снос зданий и существующих сооружений ( Business-Industry-Reports 2018) свидетельствуют о высокой эффективности работы роботов в сложных производственных условиях.
Помимо традиционных требований типа управляемость, мобильность, устойчивость, надежность и др. в данных проектах настойчиво подчеркивается необходимость наделения таких роботизированных комплексов новыми, когнитивными способностями, основы которых изложены в данной работе.
Примеры, приведенные на рис. 11 и 12 показывают актуальность затрагиваемой темы в данной работе и применение квантовой инженерии в мехатронике [8, 12] и разрабатываемых методов интеллектуального когнитивного управления на основе технологии квантовых мягких вычислений [36]
позволяет повысить эффективность работы данных роботизированных систем, не меняя облика конструктивных технологических решений аппаратной реализации.
Следует также отметить, что разрабатываемые обобщенные структуры систем управления (см. например, рис. 13) не содержат такого рода инструментария, и как отмечается самими авторами [1, 11], требуется погружение в контур управления многоагентными системами когнитивных функций взаимодействующих роботов.
Belief Prediction Perception Planning
World Belief Communication compression/ decompression
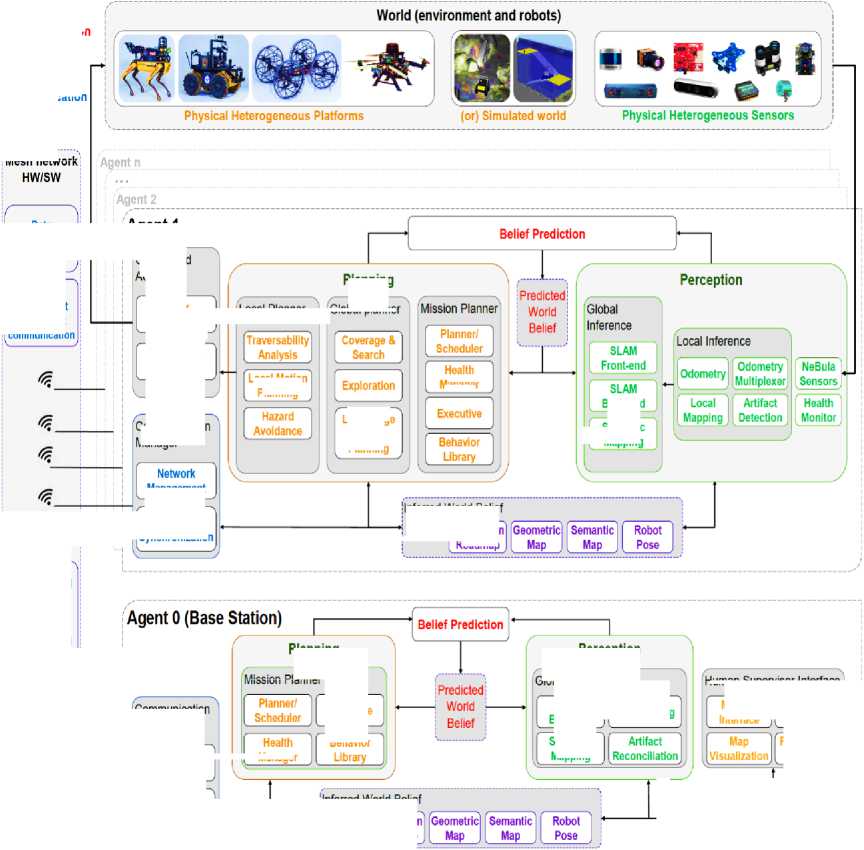
Mission Planner
Local Motion Planning nferred World Belief
World Belief Synchronization
Robot Team Monitoring
Network Management
[information [ Roadmap
Artifact Interface
Communicator Manager f Managing ' comm-denied autonomous operations;
Data retrieval in short comm windows „
Рис. 13. Пример системы управления гетерогенным роботизированным комплексом
Mesh network
Managing Intermittent inter-robot communication
Agent 1
Control and Actuation
Motor Controllers
Llght/sensor Controllers
Communicatior Manager
Management
World Belief Synchronization
Local Planner
Planning
Global planner
Long-range Motion Planning
Planning
Executive
Manager
Back-end
Semantic Mapping
Manager
Behavior
Inferred World Belief
[information Roadmap
Perception
Global Inference
SLAM Back-end
Map Merging
Human supervisor Interface
Mission
Interface
Semantic
Mapping
В то же время применение встраиваемых интеллектуальных робастных систем управления на основе технологий мягких (рис. 11 и 12, а) и квантовых когнитивных вычислений (рис. 12, б) позволяет существенно повысить эффективность и производительность без структурных изменений технологической оснастки объектов управления (см. Часть 3).
Квантовая сквозная технология в виде квантовой программной инженерии позволяет проектировать и реализовать на практике квантовое преимущество робастных встраиваемых самоорганизующихся интеллектуальных регуляторов без изменения технологической оснастки робототехнического комплекса с гарантированным достижением требуемой точности выполнения технологической операции в условиях нештатных ситуаций управления.
На рис.14 показано наглядно интеллектуальное управление роботом-манипулятором с семью степенями свободы.
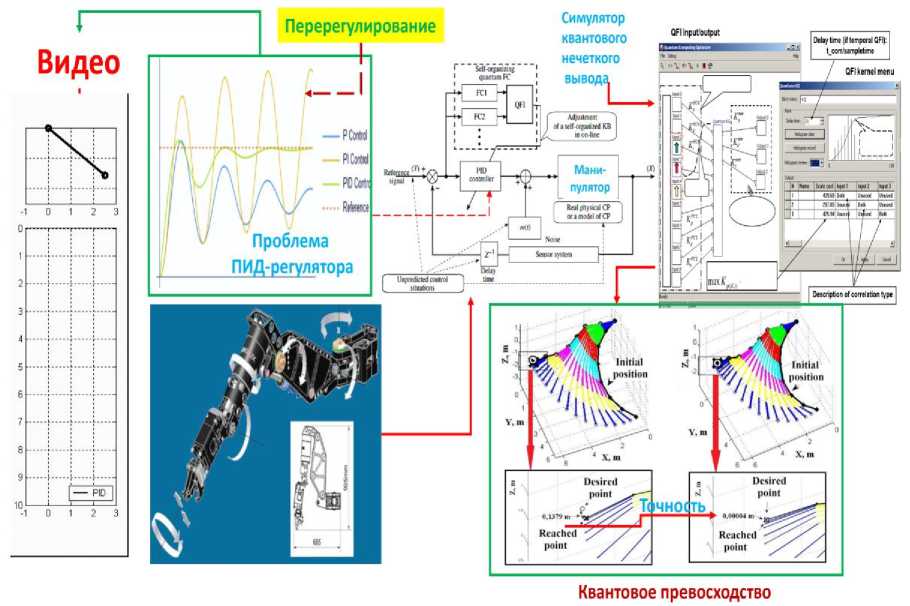
Рис. 14. Превосходство квантовой программной инженерии в задачах управления роботом-манипулятором с избыточным числом степеней свободы
Позиционная точность (ошибка отклонения от заданной цели) роботом-манипулятором при применении квантового нечеткого вывода составляет 0.0004м, а при применении нечеткого регулятора составила 0.1379 м. Таким образом, квантовое превосходство в количественном виде составило более чем в 345 раз.
Рисунок 14 наглядно демонстрирует эффективное решение проблемы оптимизации структуры ПИД-регулятора методом квантовой программной инженерии на основе квантового нечеткого вывода [37].
Рассмотрим некоторые особенности промышленного искусственного интеллекта (ИИ) во взаимосвязи с проектом «Индустрия 4.0».
Роботы в «Индустрия 4.0»
Архитектура будущего интернета вещей ( IIoT ) использует преимущества периферийных вычислений с четким распределением задач на периферии по сравнению с облаком. Роботы играют важную роль в Индустрии 4.0. В зависимости от требований это может быть роботизированное вооружение, целая сборочная линия, марсоход, андроид или патрульные роботы на ногах. Многие уже можно увидеть в области химии, переработка мусора, фармацевтическое производство, производство продуктов питания и напитков и т.д. Вот несколько примеров. KUKAiiwa – легкий робот для ответственных промышленных задач, разработанный KUKA Robotics . Baxter от Rethink Robotics – это интерактивный производственный робот для упаковки. BioRob Arm может быть использован в непосредственной близости и взаимодействия с людьми. Автоматизированное модульное оборудование предназначено для выполнения повторяющихся действий с высокой скоростью и точностью [1, 38], а также для работы там, где человеческие возможности рабочих ограничены (см. примеры на рис. 14).

Рис. 14. Примеры роботизированных модулей
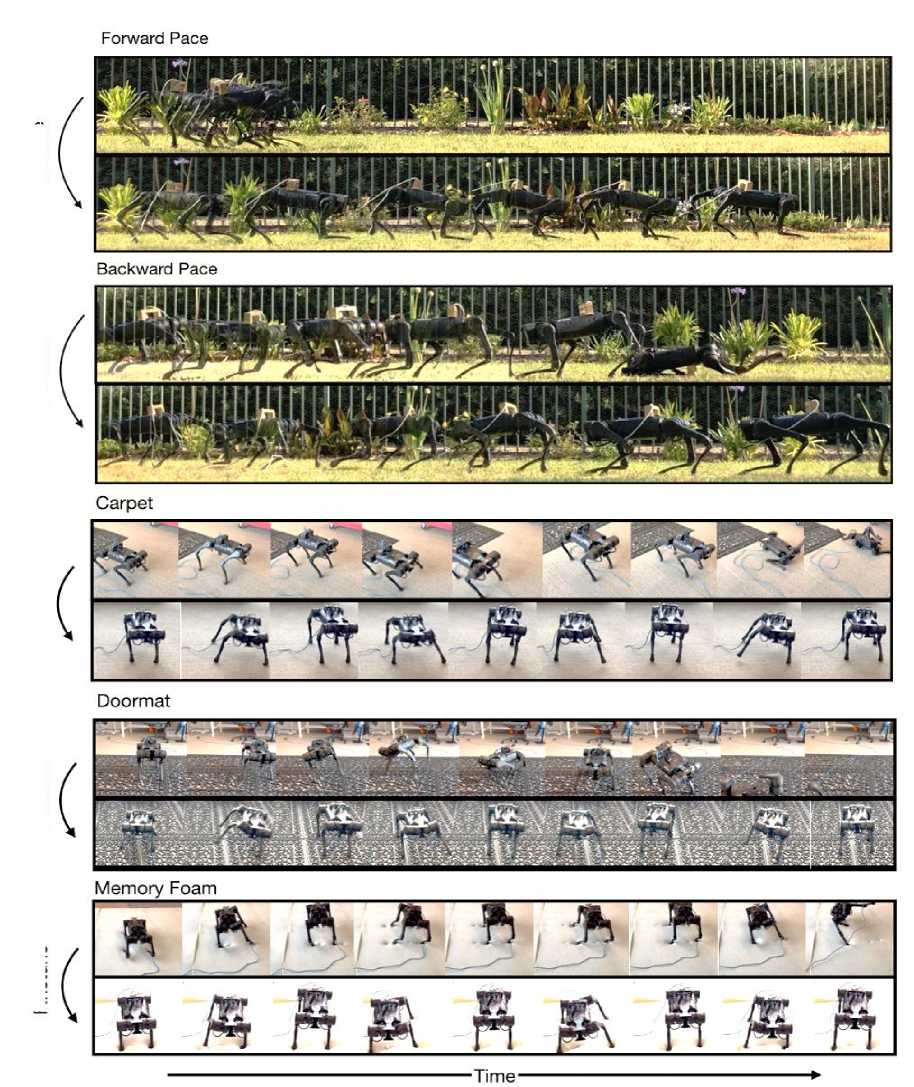
Роботизированные социотехнические системы оснащаются роботами, способными совершать сложные действия, реализуя движения нелинейной механики.
На рис. 15-17 приведены примеры подобного рода движений с заданной точностью [1, 39-42].
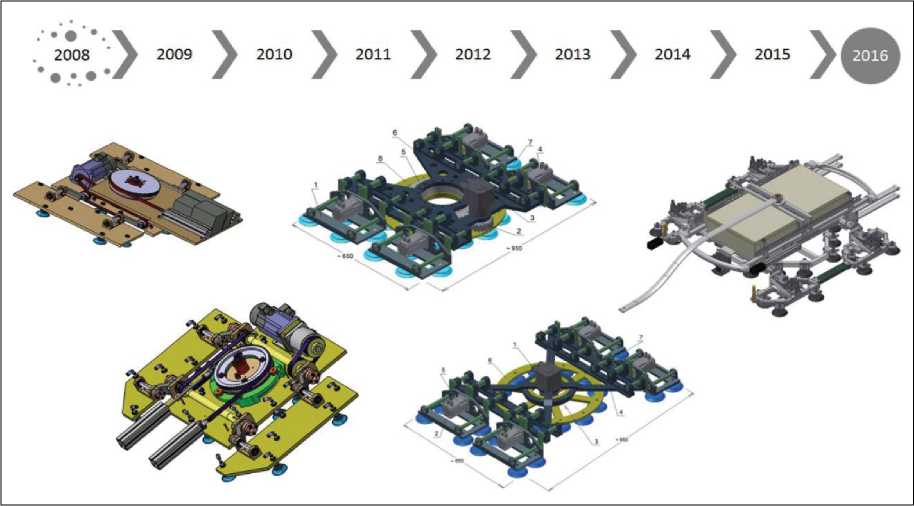
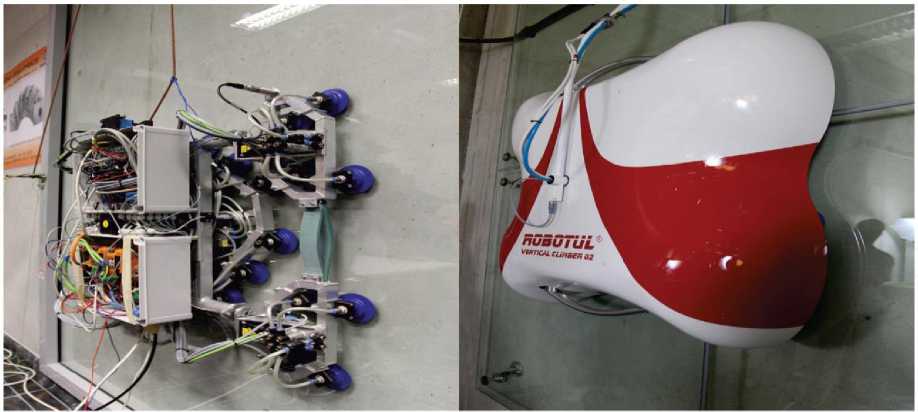
Рис. 15. Модели роботов вертикального перемещения [39,40]

Рис. 16. Робот для сбора урожая перца [41]

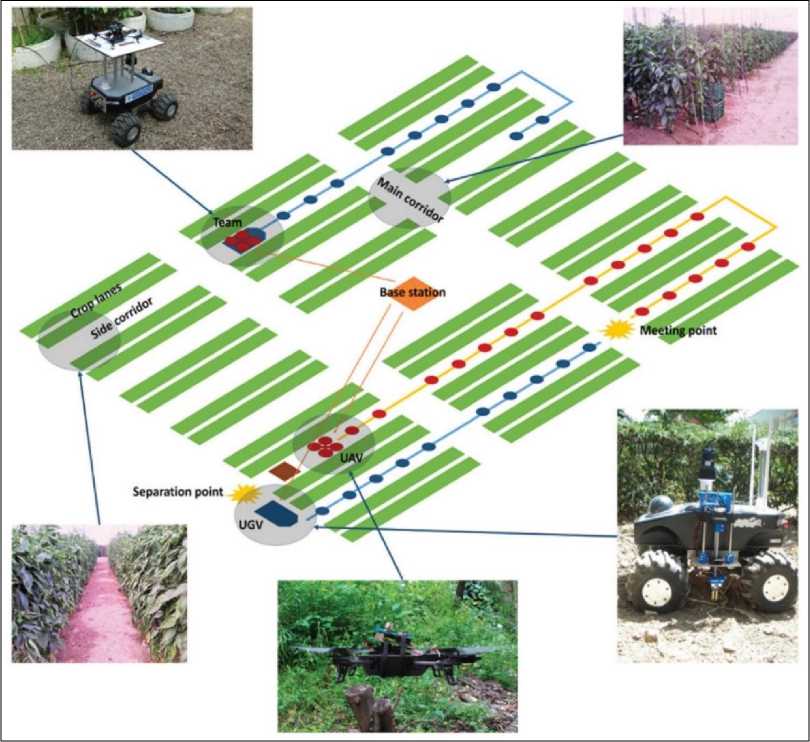
Рис. 17. Модели роботов для сельскохозяйственных работ [42]
Mногороторные дроны широко используются во многих областях, таких как инспекция, доставка, наблюдение, сельское хозяйство и развлечения. Среди различных типов многороторных беспилотных летательных аппаратов квадрокоптеры наиболее популярны благодаря своей простой конструкции и относительно высокой аэродинамической эффективности. Однако из-за меньшего резервирования ротора квадрокоптеры также более уязвимы для отказов двигателя.
Роботы сервисного обслуживания в cоциотехнических системах
Люди с ограниченными возможностями часто работают из-за своих возможностей, вызывая неудовлетворенность своей профессией, поскольку они чувствуют недостаток самореализации. Проект
«Следующее поколение - разработка инклюзивной работы с гибкими роботизированными решениями» направлен на поддержку и расширение индивидуальных рабочих возможностей с помощью инновационных технологий. Вследствие этого люди с ограниченными возможностями будут рассматриваться как часть первичного рынка труда и будут признаны ценными членами рабочего сообщества и общества. Для достижения этой цели рабочие места в промышленности должны быть адаптированы индивидуально в соответствии с физическими и когнитивными способностями людей с ограниченными возможностями. Идея состоит в том, чтобы внедрить взаимодействие человека и робота ( HRC ) на рабочих местах. Основная цель коллаборативного робота – кобота – поддерживать человека, позволяя ему выполнять рабочие задачи независимо от его физических недостатков. HRC представлен как новая вспомогательная технология для людей с ограниченными возможностями для оказания физической помощи. Вспомогательные технологии полезны только в том случае, если они адаптированы к индивидуальным потребностям. Таким образом, распределение задач между людьми и роботами является центральным аспектом процесса проектирования и программирования рабочего места HRC . Для людей с ограниченными возможностями распределение должно основываться на их индивидуальных возможностях. Следовательно, требуется метод для определения рабочей нагрузки задач, в которых конкретный человек может быть перегружен и нуждается в помощи и поддержке совместного робота.
В дополнение к перечисленным требованиям рабочее место должно быть спроектировано таким образом, чтобы можно было представить множество различных процессов сборки и тестирования, которые встречаются в промышленных приложениях. Кроме того, в дизайне должны быть реализованы принципы эргономики. По этой причине настоящая концепция приводит к созданию рабочего места, основанного на типовой сборочной станции, состоящей из регулируемого по высоте стола, монитора и освещения, а также фиксированных мест для инструментов, материалов и готовой продукции. Участник и робот, поддерживающий HRC, должны иметь доступ к инструментам, материалам и хранилищу готовой продукции. Кроме того, мобильная платформа может помочь, доставляя материалы на рабочее место.
Концепция [43] показана на рис. 18.
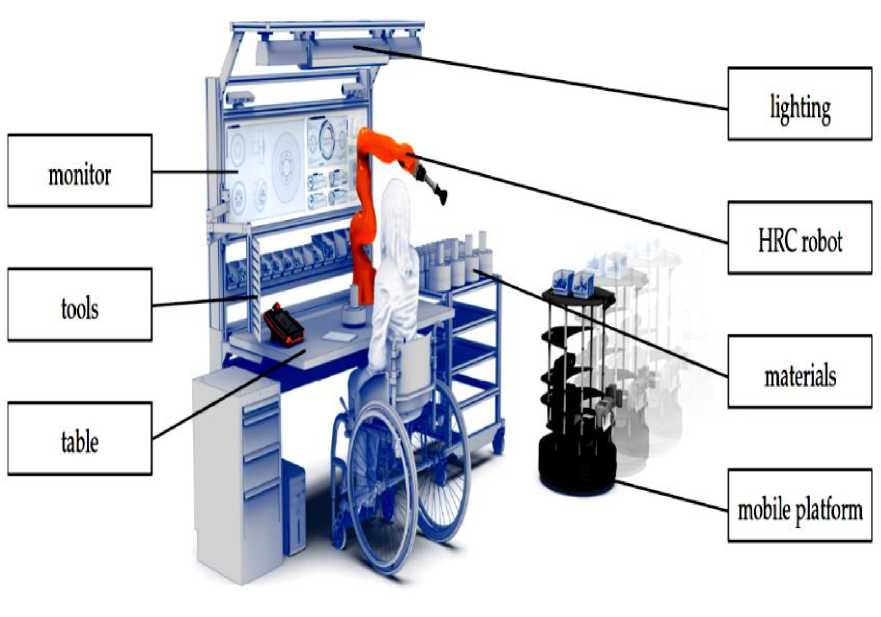

Рис. 18. Концепция рабочего места человек – робот для людей с ограниченными возможностями

(8) Robot tray users and robot may place items here

(l)Head orientation indicates robot gaze and attention to user
(2) Two small screens as eyes with emotional display
(5) Microphone for speech recognition and telephony
(6) Touchscreen PC mounted with safety cushion and palmrest
Физическая реализация влияет на взаимодействие человека-робота, поскольку люди взаимодействуют с гуманоидами иначе, чем с негуманоидами. Помимо ожиданий, морфология робота играет жизненно важную роль в его удобстве использования, приемлемости и выразительности. Поэтому требуется, чтобы морфология робота соответствовала его предполагаемой функциональности (рис. 19).
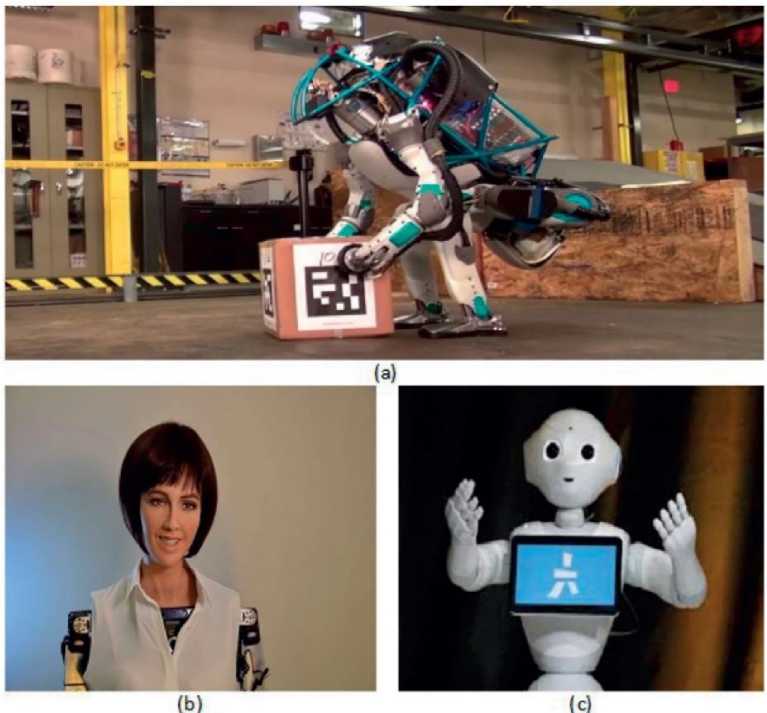
Рис. 19. Продвинутые гуманоиды: (а) АТЛАС, (б) София, (в) Пеппер [44]
Например, роботы, предназначенные для выполнять задачи, подобные человеку, должны быть оснащены соответствующим образом; визуальное сходство с человеком может не иметь большого значения в таких случаях, как в случае с ATLAS и подобными гуманоидами (рис. 19, а). С другой стороны, те, которые предназначены для целей взаимодействия, должны быть более похожи на людей, с отчетливыми выражениями лица (например, София) (рис. 19, b) или с эмоциональными речевыми способностями (например, Пеппер) (рис. 19, d).
Стремясь добиться натуралистического воплощения, дизайнеры черпают вдохновение в самой природе. Морфологический дизайн естественных социальных роботов можно отнести к антропоморфизму. В зависимости от области применения, морфологическое вдохновение для мировоззрения робота также может быть взято из зооморфизма (например, домашние животные или существа), карикатуры (например, анимация или вымышленные персонажи) и функциональных ожиданий (например, вспомогательных или служебных роботов и т. д.). Тем не менее, большинство социальных роботов предназначены для работы с людьми; таким образом, общая идея состоит в том, чтобы придать им внешний вид, похожий на человека. Поэтому больше внимания уделяется антропоморфизму.
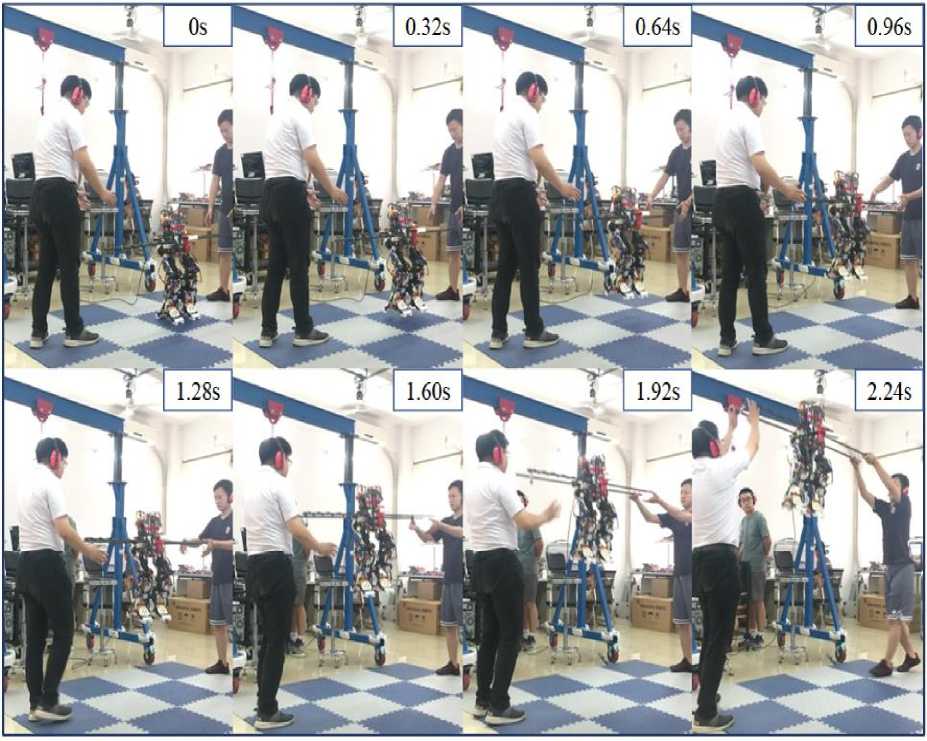
Недавно были разработаны различные гуманоидные роботы для реагирования на стихийные бедствия с новыми подходами в теории управления и другими механизмами для преодоления неровностей местности [1, 8, 45, 46]. Традиционно роботы-гуманоиды преодолевали эти препятствия, шагая, или перелезая, но этим стратегиям не хватает эффективности, особенно для опасных сред, таких как непреодолимые препятствия и геологические разломы. Для выполнения неотложных задач в сложных реальных сценариях ожидается, что роботы-гуманоиды будут обладать аэродинамическими навыками, такими как прыжки в высоту или в длину, полеты на короткие дистанции и парение, которые в несколько раз превышают длину тела.
На рис. 20 поток планирования включает в себя многослойную локальную карту для вычисления проходимости, вспомогательную задачу и всенаправленную функцию Ляпунова. Вместо обычной стратегии следования по путевым точкам или отслеживания пути реактивный поток справляется с отклонением робота, устраняя негладкие движения с помощью векторного поля (определяемого методом обратной связи), которое предоставляет команды управления в реальном времени роботу. Выходной сигнал контроллера походки определяется как функция мгновенной позы робота.
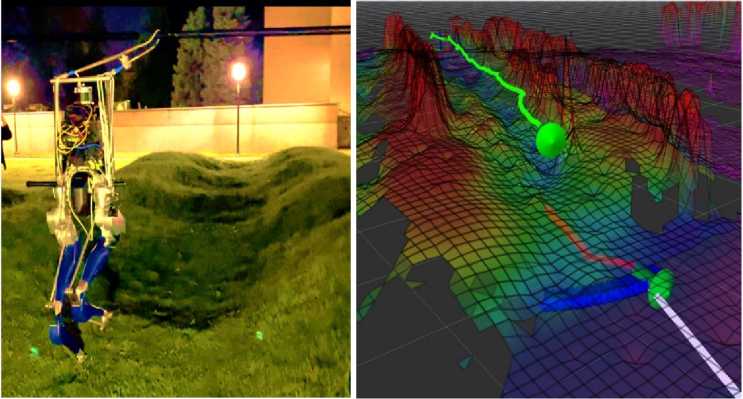
Рис. 20. Робот «Кэсси Блу» автономно пересекает Волновое поле с помощью предлагаемой системы реактивного планирования, которая состоит из потока планирования и потока реагирования [45]
Достижение полета на короткие расстояния помогает повысить эффективность роботов-гуманоидов, перемещающихся в сложных условиях (например, преодолевая большие препятствия или достигая высоты) для быстрых ликвидаций последствий аварийных ситуаций. Была предложена конструкция летающего робота-гуманоида на основе вытяжных вентиляторов под названием Jet-HR 2 (рис. 21, а).

Вид летающего робота-гуманоида Jet-HR2
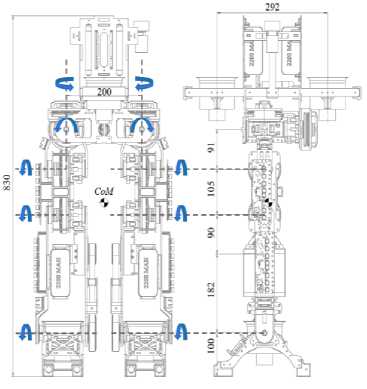
Конфигурация канального вентилятора Jet-HR2
Сборка механических компонентов ноги робота: (a) Талия (b) Модульный сустав, используемый в бедре и колене (c) Ступни (d) Бедро
(a)
(б)
(в)
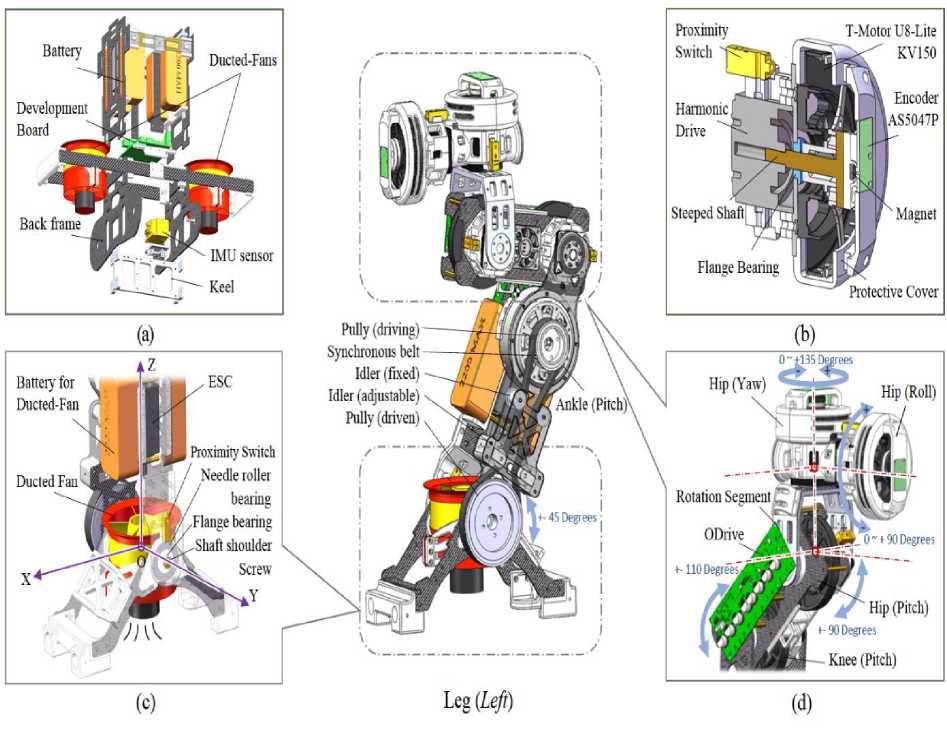
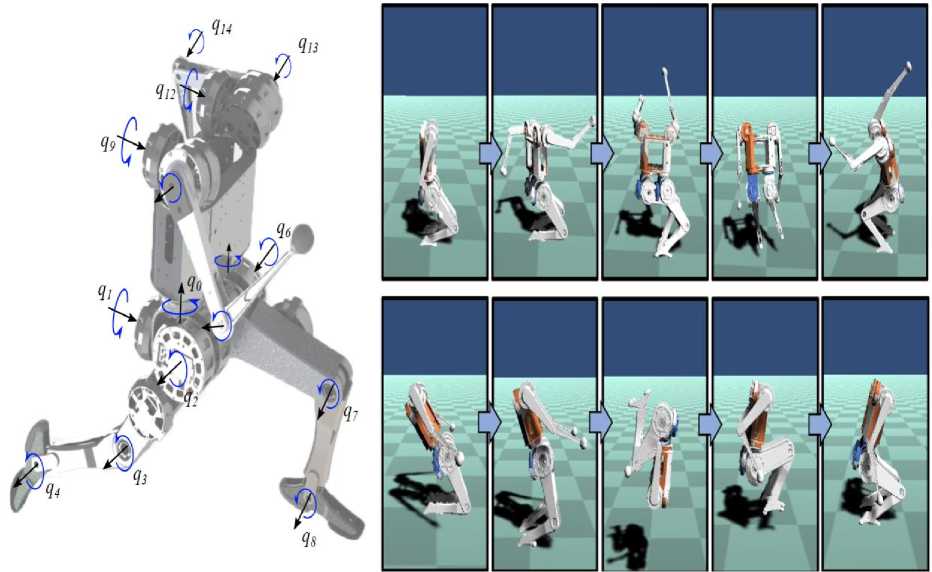
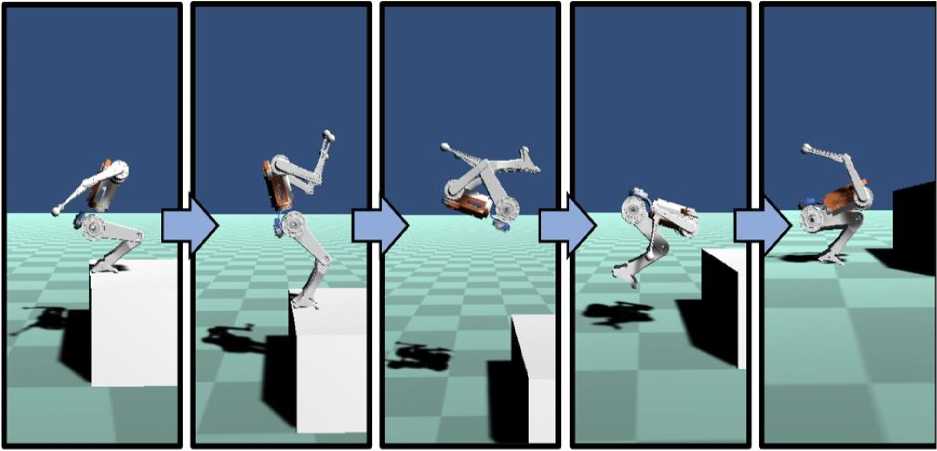
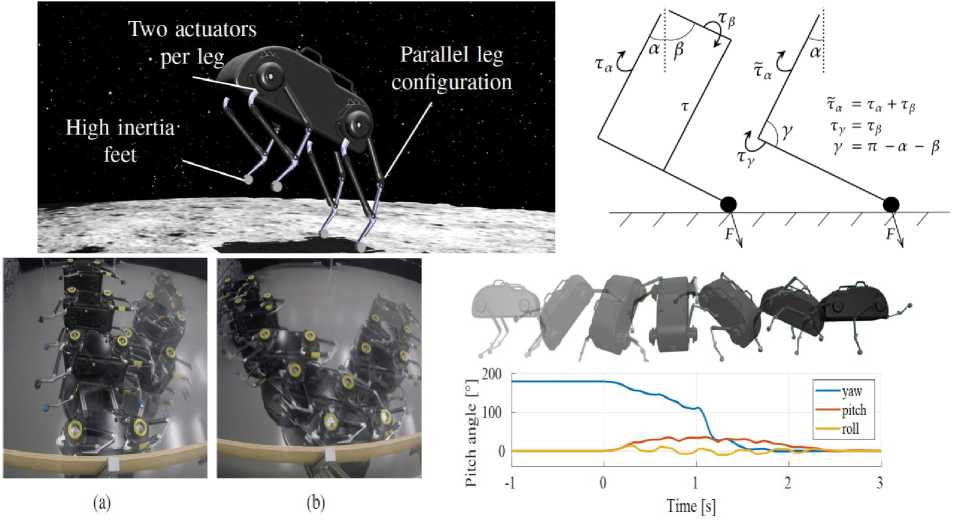
Рис. 21. Jet-HR2: летающий робот-гуманоид [45] (а) Результат эксперимента с различными стратегиями управления, в которых: а) взлет с контроллерами тангажа и рыскания; (б) робот -акробат [46]; (в) Робот использует инерцию своих ног для управления своей ориентацией [47]. Конфигурация с параллельными ногами позволяет выполнять прыжки и приземления с высоким крутящим моментом, при этом ступням придается два градуса в вертикальной плоскости
В частности, на рис. 21, а автономный робот, который имеет 10 шарнирно соединенных связей, приводимых в движение бесщеточными двигателями и двигателями для синхронно плавного движения соединений. Для достижения устойчивого взлета в условиях малой тяги к весу, конструкция робота была разработана на основе концепции вектора тяги. Силовая установка состоит из четырех канальных вентиляторов, то есть два закреплены на поясе робота, а два других установлены на опорах для управления вектором тяги. Вектор тяги контролируется путем регулировки положения стопы во время полета. Была предложена упрощенная модель и стратегия управления для решения проблемы нестабильности ориентации, вызванной массовыми ошибками и ошибками положения суставов во время взлета. В частности, модель создана для анализа сил во время взлета в фиксированном положении и определения условия эффективного регулирования положение робота в воздухе в условиях низкого отношения тяги к весу. Для упрощения модели робота и целенаправленного решения проблем пикирования и рыскания во время взлета делаются следующие допущения: 1) робот сохраняет фиксированное положение во время взлета и считается твердым телом и 2) ноги робота остаются параллельными друг с другом. Другими словами, компоненты ног робота по оси z и оси x остаются неизменными в раме тела. 3) Угол наклона канальных вентиляторов можно независимо регулировать в раме корпуса.
Результаты экспериментов [45] показали (см. рис. 21,а), что вращение робота и его поведение в пикировании во время взлета эффективно подавлялись за счет управления вектором тяги вытяжного вентилятора на ноге. Робот успешно выполнил взлет с соотношением тяги к весу 1,17 (17 кг / 20 кг) и сохранил стабильное положение, достигнув высоты взлета более 1000 мм.
Конфигурация гуманоидного робота Массачусетского технологического института (МИТ). МИТ - гуманоид имеет ноги с 5 степенями свободы и руки с 3 степенями свободы. Голеностопный сустав работает только в направлении шага. Два контактных датчика расположены на носке и пятке каждой стопы. Предлагаемая система предназначена для выполнения сальто назад человекоподобного робота с платформы высотой 0,4 м. МИТ - гуманоид выполняет прыжок с вращением на 180° (вверху) и сальто вперед из положения стоя (внизу) [46].
Пример развития когнитивных способностей автономного робота с учетом приведенного аффор-денс исчисления приведен на рис. 22.

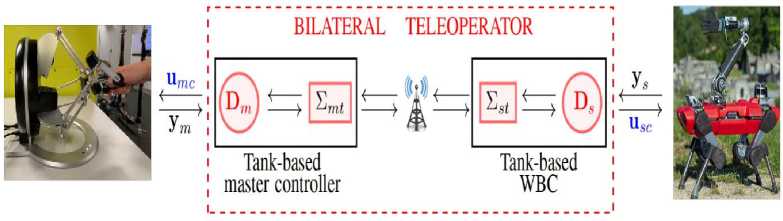
Рис. 22. (а) Экспериментальная установка с Omega6 в качестве тактильного устройства на ведущей стороне (слева) и платформа ANYmal C, оснащенная роботизированной рукой на ведомой стороне (справа); (б) Схема взаимодействия основных элементов слева направо: человек-оператор и тактильное устройство, двусторонний телеоператор и окружающая среда [48]
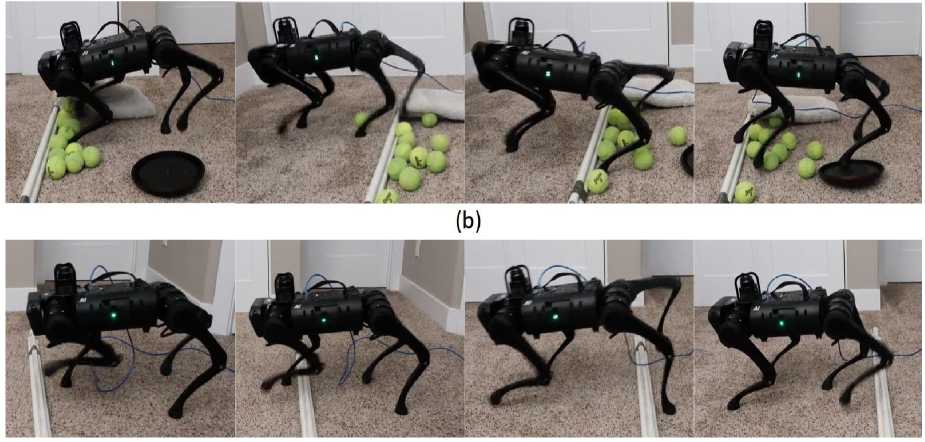
В случае структурной схемы управления одноколесным роботом со встроенным манипулятором в контур управления введены традиционный ПД-регулятор (позиционное управление одноколесным роботом) и когнитивный регулятор, вырабатывающий силу управления манипулятором совместно с информацией о позиции робота перед дверью. Полностью автономная роботизированная система, обладающая как наземной, так и воздушной мобильностью, представлена на рис. 23 [49-51].

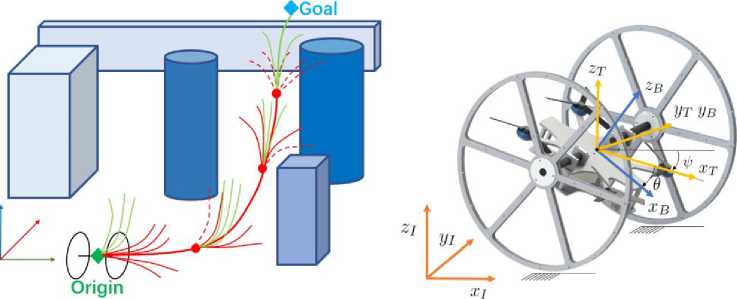


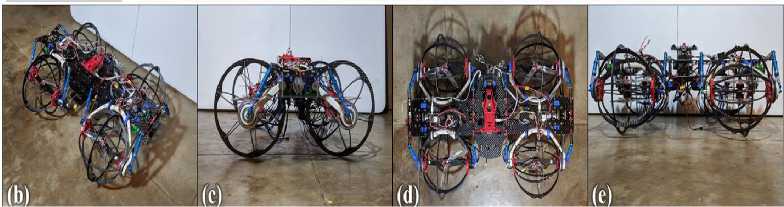
Рис.23. Предлагаемая навигационная структура, в которой настраиваемый автономно робот движется в окружающей среде с помощью наземно-воздушного гибридного передвижения [49-51]
На первом этапе разрабатывался легкий наземно-воздушный квадрокоптер, обладающий достаточными сенсорными и вычислительными ресурсами. Он сочетает в себе как высокую мобильность беспилотных летательных аппаратов, так и большую продолжительность жизни беспилотных наземных транспортных средств. Затем, на втором этапе, предлагается адаптивная навигационная структура, обеспечивающая полную автономию. В этой структуре предлагается иерархический планировщик движения для создания безопасных и маломощных наземных траекторий в неизвестных условиях. Кроме того, представляется унифицированный контроллер движения, который динамически регулирует потребление энергии при наземном передвижении. Обширные эксперименты в реальных условиях и сравнения эталонных показателей подтверждают надежность и выдающуюся производительность предлагаемой системы. Чтобы объединить преимущества обоих типов мобильных роботов, исследователи предлагают различные наземно-воздушные бимодальные транспортные средства ( TABV) . Во время испытаний он безопасно пересекает сложные среды с наземно-воздушной интегрированной мобильностью и достигает 7-кратной экономии энергии при наземном передвижении.
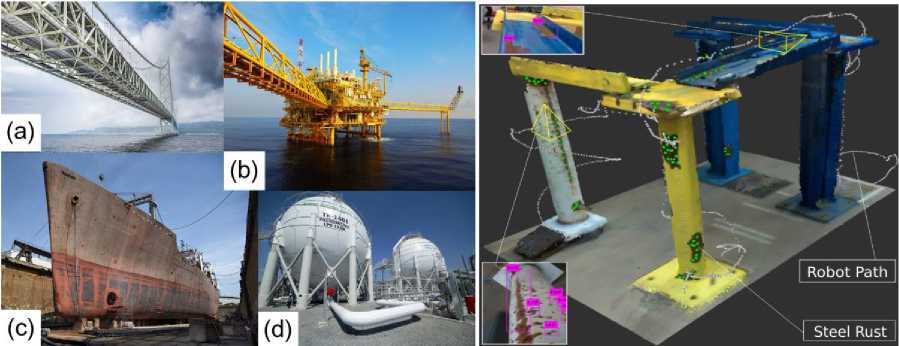
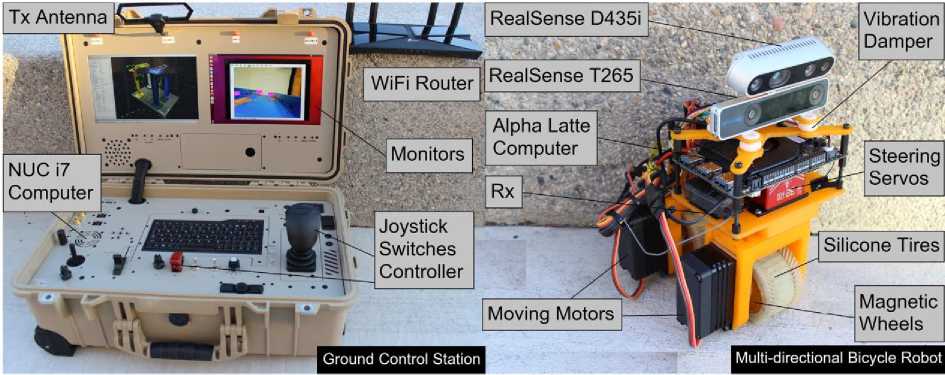
Очистка от ржавчины, загрязнений и др. типовых стальных конструкции таких как: a) стальные мосты для перехода через море. б) морские нефтяные вышки. в) корабельные снаряды. г) нефтяные резервуары и трубопроводы (см. рис. 50, источник: изображения Google ) потребовала новых решений проектирования конструкции многоцелевого велосипедного робота, предназначенная для проверки общих ферромагнитных конструкций, включая конструкции сложной формы.
К проектируемому роботу предъявлялись следующие требования: 1) робот может подниматься по поверхностям с широким диапазоном внешних диаметров (≥ 150 мм), которые обычно встречаются на круглых трубах или цилиндрических поверхностях; 2) робот может преодолевать колючие, выпуклые или вогнутые препятствия в переходных стыках ферменных конструкций; 3) робот может перемещаться по стальным конструкциям со сложным расположением препятствий, таких как болты, гайки и зазоры; 4) система передвижения может маневрировать в узких местах (шириной ≥ 100 мм) и может двигаться вбок с большими изменениями ориентации.
Концепция передвижения основана на расположении двух магнитных колес в велосипедной конфигурации с двумя независимыми исполнительными механизмами рулевого управления [52]. Такая конфигурация позволяет роботу обладать многонаправленной мобильностью. Дополнительный свободный шарнир помогает роботу естественным образом адаптироваться к неровным и сложным поверхностям стальных конструкций. Самое большое преимущество робота заключается в том, что он механически прост и обладает высокой мобильностью. Кроме того, робот оснащен датчиками для контроля состояния конструкции. Окончательные результаты проверки визуализируются в виде 3 D -моделей мостов вместе с отмеченными местами обнаруженных участков ржавчины.

С точки зрения автономности возможные направления разработок могут предусматривать автономное построение карты, локализацию, навигацию и обнаружение объектов на борту. Учитывая известные карты, также можно выполнять планирование траектории движения для автономных проверок или методы, основанные на обучении, такие как обучение с подкреплением, чтобы научить робота выполнять задачу проверки более эффективно.
Квантовые дроны
Беспилотные летательные аппараты (БПЛА) или дроны как прорывная технология получили впечатляющее распространение в последние годы из-за преимуществ, которые они могут предоставить, и их оперативной гибкости. Беспилотные летательные аппараты могут использоваться для различных целей, в том числе для обеспечения общественной безопасности, доставки логистики, охвата регионов, чрезвычайных ситуаций, мониторинга дорожного движения и контроля заторов, береговых инспекций, лесовосстановления и т. д. Тем не менее одной из наиболее важных проблем технологии беспилотных летательных аппаратов (БПЛА) является достижение оптимального развертывания. БПЛА являются одними из самых быстрорастущих, высокоуровневых и широко используемых беспилотных авиационных систем. Тем не менее, обнаружение столкновений и планирование траектории остаются нерешенными проблемами. Это связано с тем, что до сих пор существуют практические и теоретические проблемы с текущей практикой. Что наиболее важно, параллельно с впечатляющими прорывами и инновациями, вызванными БПЛА в обществе, быстрое развитие в этой области было исследовано путем изучения потенциальной мегатенденции технологий квантовых вычислений.
Квантовые вычисления считаются областью исследований, которая объединяет знания из инженерии, физики и информатики. Хотя Пол Бениофф опубликовал принципы квантовой информации в 1980 году, можно считать, что развитие квантовых вычислений началось с работ Ричарда Фейнмана и Юрия Манина, продвигающих исследования неклассической логики вычислений. Различные компьютерные задачи теперь могут выполняться на квантовом процессоре экспоненциально быстрее, чем на обычном центральном процессоре. Квантовые вычисления построены на фундаментах квантовой физики, включая квантовую суперпозицию, теорему о недопустимости клонирования и квантовый угол. Из-за отсутствия классического аналога этих процессов эквивалентные результаты не могут быть получены с использованием обычных вычислений. Ранее было проведено несколько экспериментов по квантовым вычислениям, и в настоящее время проводится несколько исследований. В недавнем исследовании квантовые состояния 53-кубитов были успешно установлены с помощью процессора, построенного из сверхпроводниковых кубитов. Согласно полученным данным, процессор занимает более ста секунд, чтобы произвести миллион выборок одного экземпляра квантовой схемы, в то время как суперкомпьютеру может потребоваться десять тысяч лет, чтобы провести тот же анализ. Эти результаты показывают возможности квантовых вычислений в различных гражданских и стратегических приложениях, таких как, например, другие передовые технологии, такие как дроны [53].
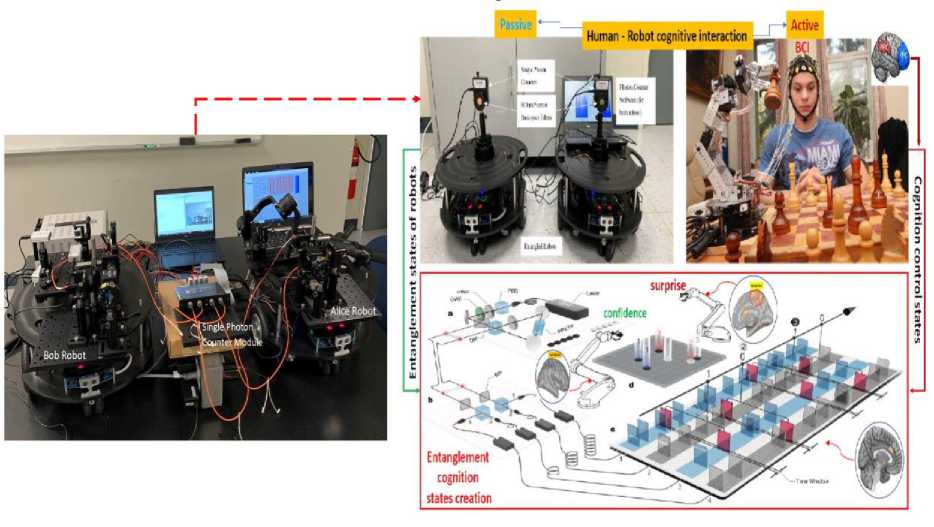
Исследователи обращаются, в частности, к применению квантовой запутанности и криптографии для автоматизации и управления динамическими системами. Динамическая система - это система, в которой скорости изменения переменных состояния не пренебрежимо малы. Квантовая запутанность реализуется с помощью процесса спонтанного параметрического преобразования с понижением частоты. Две запутанные автономные системы демонстрируют коррелированное поведение без какой-либо классической связи между ними из-за явления квантовой запутанности. В частности, поведение системы Боба на расстоянии коррелирует с соответствующей системой Алисой. В сценарии автоматизации «Робот Боб» связан с «Роботом Алисой» в выполнении автономных задач без какой -либо классической связи между ними. Квантовая криптография - это возможность, обеспечивающая гарантированную безопасность. Такие возможности могут быть реализованы в управлении автономными механическими системами, где, например, «Автономная система Алисы» может управлять «Автономной системой Боба» для приложений автоматизации и робототехники. Применение квантовых технологий в механических системах в масштабе большем, чем атомистический, для управления и автоматизации является новым вкладом рассматриваемого направления исследований квантовой программной инженерии. В частности, предложен вариант передаточной функции управления интегрированной классической динамической системой и квантовым состоянием с обратной связью.
В сценарии многоагентной роботизированной системы могут быть возникать различные задачи управления, такие как группировка, рой и совместные физические задачи. При выполнении роботизированных задач общая проблема связана с кинематической синхронизацией роботизированных платформ в сети автономных систем в динамической среде. Например, в задаче формирования группы роботизированных платформ (или беспилотных автономных систем) требуется сохранение эталонных относительных положений между агентами.
Динамика роботизированной платформы может быть задана уравнениями движения в терминах скорости изменения поступательной скорости и скорость изменения угловой скорости (ускорения). Для мультиагентной сетевой системы уравнения движения агентов могут быть заданы системой уравнений, которая в матричной форме может быть представлена как {F} = [М]{а}. Объединение задач классической динамики с квантовыми возможностями, такими как квантовая запутанность и криптография, для повышения производительности динамических систем возможно с помощью междисциплинарного подхода. Интегральная квантовая и классическая блок-схема управления динамической системой [54] представлена на рис. 51, а.
Квантовое/ классическое возмущения
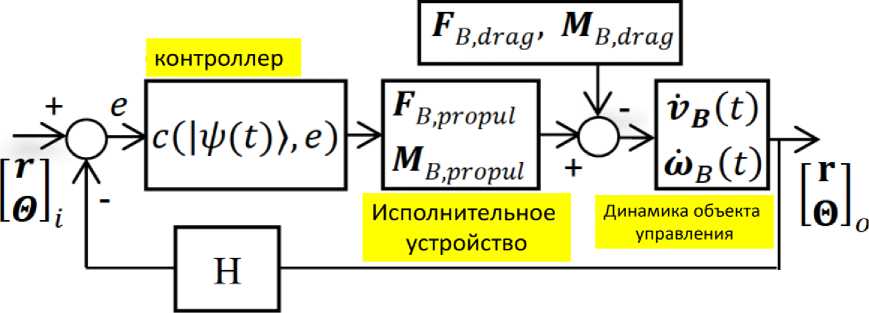
Классическое или / и квантовое измерение
(а)

(б)
Рис. 25. Экспериментальная установка робота с квантовой запутанностью
Уравнения движения автономной системы, содержащей роботизированные платформы и манипуляторы представлены схематично изображением системы на рис. 51 ,б.
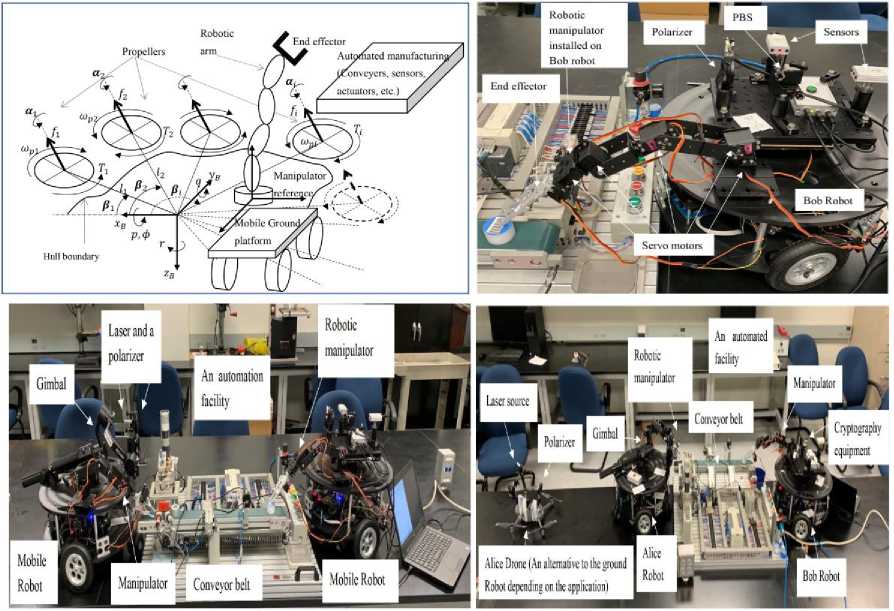
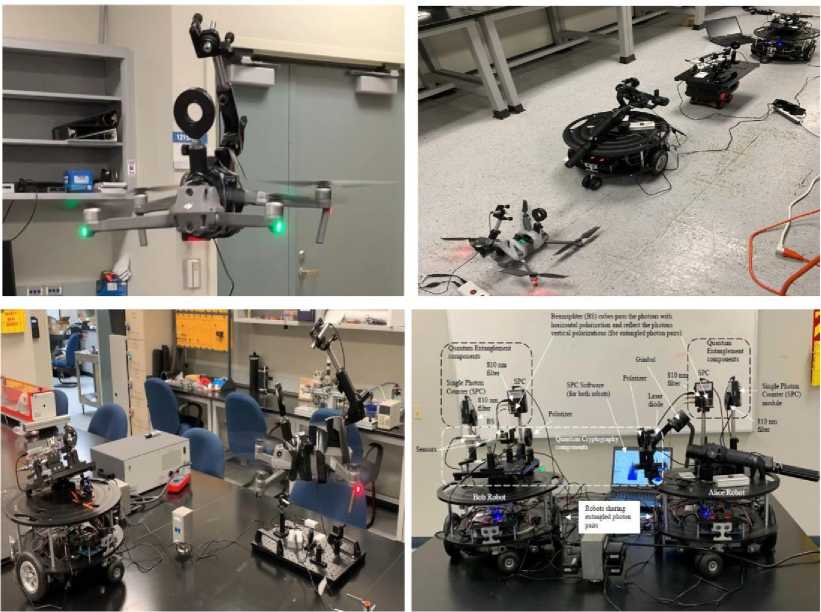
Квантовая запутанность может быть достигнута с помощью процесса спонтанного параметрического преобразования с понижением частоты ( SPDC ), когда две частицы запутываются и предсказывают нелокальное поведение. Фотоны могут быть состояниями вертикальной или горизонтальной поляризации, а запутанные фотоны могут быть определены суперпозицией двух фотонов, находящихся в ортонормированных линейных поляризациях (вертикальной и горизонтальной).
Квантовая механика только предсказывает, что фотоны находятся в состояниях вертикальной и горизонтальной поляризации одновременно, но состояние поляризации фотонов не может быть индивидуально помечено для каждого фотона. Когда производится измерение, мы можем найти каждый из двух фотонов в одном из двух состояний с соответствующей вероятностью. Зная поляризацию одного фотона, можно предсказать поляризацию другого фотона, поскольку поляризации фотонов в процессе SPDC ортогональны. Однако два фотона находятся только в запутанном состоянии, пока не будет произведено измерение. Как только измерение выполнено, фотоны больше не коррелированы, и, следовательно, они больше не запутаны из-за нелокального свойства квантовой механики (нарушение неравенств Белла). Нелокальные свойства привели ко многим замечательным приложениям, таким как квантовая телепортация и возникновению новой области квантовых вычислений, и обнаружению падающего фотона, который используется для оценки запутанности.
Квантовая криптография и запутанность были исследованы с применением к автономным системам, и представлены описанием соответствующих экспериментальных установок и процедур на рис. 51, б.
Квантовые кооперативные автономные платформы, представленные в криптографии с помощью технологии создания запутанных квантовых состояний, и комбинация сценария запутывания и криптографии для автономии (где запутанность запускает процесс криптографии для нескольких роботизированных систем), возможно, могут быть самой сложной техникой. в области кооперативной робототехники и технологии беспилотных систем. Это связано с предельной скоростью распространения фотонов для приложений управления роботами, настоящей гарантированной безопасностью и невосприимчивостью к кибератакам, а также возможностью доступа к квантовым возможностям процесса запутывания состояний (не имеющего аналога в классической области). Затрагиваемые вопросы и применение квантовых сквозных ИТ в разработке проектов «Индустрия 4.0» [8,12,55,56] совместно с ИТ квантовой программной инженерии как совместной цифровой платформы для проекта «Индустрия 5.0» обсуждаются в Части 3 настоящей работы.
Выводы
-
- Перед образованием РФ стоят задачи «идти в ногу» с широким внедрением интеллектуальных роботов и цифровых технологий в промышленность и повседневную жизнь. Решение этих проблем требует новых подходов к обучению на всех уровнях образования и извлечения активных знаний о возможностях интеллектуальных робототехнических систем.
-
- Требуется программа повышения квалификации для ИТ-специалистов «Интеллектуальная робототехника и интеллектуальные промышленные системы управления», которая реализует подход к обучению понятиям и навыкам разработки и применения роботов, совместного мониторинга роботизированных социотехнических систем и искусственного интеллекта посредством практики с системами, состоящими из нескольких взаимодействующих роботов.
-
- Следует отметить насущную необходимость внедрения концепций и технологий Индустрии 4.0 в образование. Цель состоит в том, чтобы разработать методологические и практические подходы, облегчающие приобретение таких профессиональных навыков.
-
- При разработке и реализации подхода достижения поставленной цели необходимо совместно решать технические, педагогические, организационные и исследовательские задачи.
Список литературы Интеллектуальное когнитивное управление роботизированными социотехническими системами Ч.2: нелинейные модели интеллектуальной робототехники для проекта «Индустрия 4.0»
- Тятюшкина О. Ю., Ульянов С. В. Интеллектуальное когнитивное управление роботизированными социотехническими системами. Ч. 1: Робототехнические системы и модели взаимодействия «человек – робот» в «Индустрия 4.0» // Системный анализ в науке и образовании: сетевое научное издание. 2021. № 3. C. 44–101. URL : http://sanse.ru/download/447.
- Mueller E. Chen XL., Riedel R. Challenges and Requirements for the Application of Industry 4.0: A Special Insight with the Usage of Cyber-Physical System // Chin. J. Mech. Eng. 2017. – Vol. 30. – Pp. 1050–1057. – DOI: 10.1007/s10033-017-0164-7.
- Fourth Industrial Revolution: Current Practices, Challenges, and Opportunities/ A. Petrillo [et al.] // Digital transformation in smart manufacturing. – InTech. – 2018. – Pp. 1-18. – DOI: http://dx.doi.org/10.5772/intechopen.72304.
- Phuyal S., Bista D., Bista R. Challenges, Opportunities and Future Directions of Smart Manufacturing: A State of Art Review // Sustainable Futures. – 2020. – Vol. 2. – Pp. 100023. – DOI: https://doi.org/10.1016/j.sftr.2020.100023.
- Yang G.-Z. The grand challenges of Science Robotics // Sci. Robotics. – 2018. – Vol. 3. – P. 7650.
- Smart Factory of Industry 4.0: Key Technologies, Application Case, and Challenges / B. Chen [et al.] // IEEE Access. Special Section On Key Technologies For Smart Factory Of Industry 4.0. – 2018. – Vol. 6. – Pp. 6505-6519. – DOI: 10.1109/ACCESS.2017.2783682
- Industry 4.0 How to navigate digitization of the manufacturing sector/ McKinsey Digital. - 2015.
- Intelligent cognitive robotics Vol. I: Soft computational intelligence and information — thermodynamic law of intelligent cognitive control / O. Yu. Tyatyushkina [et al.]. – M.: Kurs. – 2022.
- NeBula: Quest for Robotic Autonomy in Challenging Environments; TEAM CoSTAR at the DARPA Subterranean Challenge (preprint version) / A. Agha [ et. al.] // arXiv:2103.11470v1 [cs.RO] 21 Mar 2021.
- Heterogeneous Ground and Air Platforms, Homogeneous Sensing: Team CSIRO Data61’s Approach to the DARPA Subterranean Challenge / N. Hudson [et al.] // arXiv:2104.09053v1 [cs.RO] 19 Apr 2021.
- The Duo of Artificial Intelligence and Big Data for Industry 4.0: Review of Applications, Techniques, Challenges, and Future Research Directions / S. K. Jagatheesaperumal [et. al.] // arXiv:2104.02425v1 [cs.AI] 6 Apr 2021.
- Интеллектуальная когнитивная робототехника. Часть 1: Технология квантовых когнитивных вычислений / В. В. Кореньков, С. В. Ульянов, А. А. Шевченко, А. В. Шевченко. – М.: Курс. – 2022. – 557 с.
- Legged Robots that Keep on Learning: Fine-Tuning Locomotion Policies in the Real World / L. Smith [et al.] // arXiv:2110.05457v1 [cs.RO] 11 Oct 2021.
- Passivity-based control for haptic teleoperation of a legged manipulator in presence of time-delays / M. Risiglione et al. // arXiv:2108.07658v1 [cs.RO] 17 Aug 2021.
- Staub N. Models, algorithms and architectures for cooperative manipulation with aerial and ground robots. Automatic. Université Paul Sabatier - Toulouse III, 2018.
- Aerial manipulator with door opening function / A. Dameitry [et al.] // Proc. of the 9th JFPS Intern. Symposium on Fluid Power. – Matsue, 2014 Oct. 28 – 31.– Pp. 195-200.
- Moore J. Closed-Loop Control of a Delta-Wing Unmanned Aerial-Aquatic Vehicle // arXiv:1906.01532v1 [cs.RO] 4 Jun 2019.
- White Paper: AI in Industrial Automation. – German Electrical and Electronic Manufacturers’ Associa-tion, 2021.
- Dagnaw G. Artificial Intelligence Towards Future Industrial Opportunities and Artificial Intelligence Towards Future Industrial Opportunities and Challenges // The 6th Annual ACIST Proceedings (2020) African Conference on Information Systems and Technology 16. 2020. URL: https://digitalcommons.kennesaw.edu/acist/2020/allpapers/16.
- Yang F., Gu S. Industry4.0, a revolution that requires technology and national strategies // Complex & Intelligent Systems. – 2021. – Vol. 7. – Pp. 1311–1325. DOI: https://doi.org/10.1007/s40747-020-00267-9.
- Lee Ch., Lim Ch. From technological development to social advance: A review of Industry 4.0 through machine learning // Technological Forecasting & Social Change. – 2021. – Vol. 167. – Pp. 120653.
- Industry 4.0 Technologies for Manufacturing Sustainability: A Systematic Review and Future Research Directions / A. Jamwal [et al.] // Appl. Sci. – 2021. – Vol. 11. – Pp. 5725. – DOI: https://doi.org/10.3390/app11125725.
- Smart Manufacturing and Intelligent Manufacturing: A Comparative Review/ B. Wang [et al.] // Engi-neering. – 2021. – Vol. 7. – Pp. 738–757. – DOI: https://doi.org/10.1016/j.eng.2020.07.017
- Butepage J., Kragic D. Human-Robot Collaboration: From Psychology to Social Robotics // arXiv:1705.10146v1 [cs.RO] 29 May 2017.
- Put the Bear on the Chair! Intelligent Robot Interaction with Previously Unseen Objects via Robot Imagination / H. Wu [et al.] // arXiv:2108.05539v1 [cs.RO] Aug 2021.
- Artificial Intelligence-Driven Customized Manufacturing Factory: Key Technologies, Applications, and Challenges / J. Wan [et al.] // Proceedings of the IEEE – October 2020. – DOI: 10.1109/JPROC.2020.3034808.
- Fujimaki R. The 6 Challenges of Implementing AI in Manufacturing // Foundry Management & Tech-nology. — Mar 01, 2021.
- Quantum Mechatronics / L. Lamata [et al.] // Electronics. - 2021. - Vol. 10. - Pp. 2483. DOI: https://doi.org/ 10.3390/electronics10202483.
- Legged Robots that Keep on Learning: Fine-Tuning Locomotion Policies in the Real World / L. Smith [et al.] // arXiv:2110.05457v1 [cs.RO] 11 Oct 2021.
- Li Z., Cummings C., Sreenath K. Animated Cassie: A Dynamic Relatable Robotic Character // arXiv:2009.02846v1 [cs.RO] 7 Sep 2020. DOI: https://doi.org/10.48550/arXiv.2009.02846
- GLiDE: Generalizable Quadrupedal Locomotion in Diverse Environments with a Centroidal Model / Z Xie. [et al.] // arXiv:2104.09771v1 [cs.RO] 20 Apr 2021
- Sharkawy A.N. Human-Robot Interaction: Applications // 1st IFSA Winter Conference on Automation, Robotics & Communications for Industry 4.0 (ARCI’ 2021), 3-5 February 2021, Chamonix-Mont-Blanc, France.
- Industry 4.0 and Prospects of Circular Economy: A Survey of Robotic Assembly and Disassembly / M. Daneshmand [et al.] // arXiv:2106.07270v1 [cs.RO] 14 Jun 2021/
- Versatile Multilinked Aerial Robot with Tilting Propellers: Design, Modeling, Control and State Esti-mation for Autonomous Flight and Manipulation / M. Zhao [et al.] // arXiv:2008.05613 [cs.RO]. 12 Mar 2020.
- Singularity-free Aerial Deformation by Two-dimensional Multilinked Aerial Robot with 1-DoF Vector-able Propeller / M. Zhao [et al.] // arXiv:2101.04892 [cs.RO]. 13 Jan 2021.
- Ulyanov S. V. Quantum Algorithm of Imperfect KB Self-organization. Pt I: Smart Control-Information-Thermodynamic Bounds // Artificial Intelligence Advances. - 2021. - Vol. 3. - No 2. - Pp. 13-36.
- Ulyanov S. V. Intelligent cognitive robotics: Quantum computational intelligence toolkit and quantum self - organized smart control. – M.: Kurs. – 2022.
- Edwards J. Building a Smart Factory with AI and Robotics: Whitepaper // Robotic Bussiness Review. – 2021.
- The WL_PCR: A Planning for Ground-to-Pole Transition of Wheeled-Legged Pole Climbing Robots / Y. Wang [et al.] // Robotics. – 2021. – Vol. 10. – P. 96. – DOI: https://doi.org/10.3390/robotics10030096.
- Horák M., Starý M., Novotný F. Service Robots for Motion and Special Applications on the Vertical Oriented Walls // In Service Robots (Chapter 5). – INТЕCH. – 2017. – DOI: 10.5772/intechopen.70037.
- Masood M.U., Haghshenas-Jaryani M. A Study on the Feasibility of Robotic Harvesting of Chile Pep-per // Robotics. – 2021. – Vol. 10. – P. 94. – DOI: https://doi.org/10.3390/robotics 10030094.
- Robots in Agriculture: State of Art and Practical Experiences / J.J. Roldán [et al.] // In Service Robots (Chapter 4). – INТЕCH. – 2017. – DOI: http://dx.doi.org/10.5772/intechopen.69874. – [Downloaded from: http://www.intechopen.com/books/service-robots].
- Determining Robotic Assistance for Inclusive Workplaces for People with Disabilities / E. Hüsing [et al.] // Robotics. – 2021. – Vol. 10. – No 1. – Pp. 44. – DOI: https://doi.org/10.3390/robotics10010044.
- Prescott T.J., Robillard J.M. Are friends electric? The benefits and risks of human-robot relationships // iScience. – 2021. – Vol. 24. – P. 101993. – DOI: https://doi.org/10.1016/j.isci.2020.101993.
- Design of a Flying Humanoid Robot Based on Thrust Vector Control / Y. Li [et al.] // arXiv:2108.11557v1 [cs.RO] 26 Aug 2021.
- The MIT Humanoid Robot: Design, Motion Planning, and Control For Acrobatic Behaviors / Chignoli M. [et al.] // arXiv:2104.09025v1 [cs.RO] 19 Apr 2021.
- Cat-like Jumping and Landing of Legged Robots in Low-gravity Using Deep Reinforcement Learning / N. Rudin [et al.] // arXiv:2106.09357v1 [cs.RO] 17 Jun 2021.
- Legged Robots that Keep on Learning: Fine-Tuning Locomotion Policies in the Real World / L. Smith [et al.] // arXiv:2110.05457v1 [cs.RO] 11 Oct 2021.
- An Autonomous and Adaptive Terrestrial-Aerial Quadrotor / R. Zhang [et al]. // arXiv:2109.04706v1 [cs.RO] 10 Sep 2021.
- BAXTER: Bi-modal Aerial-Terrestrial Hybrid Vehicle for Long-endurance Versatile Mobility: Preprint Version / H.C. Choi [et al.] // arXiv:2102.02942v1 [cs.RO] 5 Feb 2021.
- Autonomous Hybrid Ground/Aerial Mobility in Unknown Environments / D.D. Fan [et al] // arXiv:2009.05631v1 [cs.RO] 11 Sep 2020.
- Multi-directional Bicycle Robot for Steel Structure Inspection / S.T. Nguyen [et al] // arXiv:2103.11522v1 [cs.RO] 22 Mar 2021.
- Survey of Promising Technologies for Quantum Drones and Networks / A. Kumar [et al:] // IEEE Access. – 2021. – Vol. 9. – No 12. – Pp. 125868-125911. – DOI:10.1109/ACCESS.2021.3109816
- Quantum Entanglement and Cryptography for Automation and Control of Dynamic Systems / А. Khoshnoud [еt al.] // arXiv:2007.08567 [cs/RO]. 12 July 2020.
- Villalba-Diez J., Zheng X. Quantum Strategic Organizational Design: Alignment in Industry 4.0 Com-plex-Networked Cyber-Physical Lean Management Systems // Sensors. – 2020. – Vol. 20. – Pp. 5856. –DOI:10.3390/s20205856.
- Villalba-Diez J., Benito R. M., Losada J. C. Industry 4.0 Quantum Strategic Organizational Design Configurations. The Case of Two Qubits: One Reports to One // Sensors. – 2020. – Vol. 20. – Pp. 6977. – DOI:10.3390/s20236977.
