Интеллектуальные датчики феррозондового типа

Автор: Прищепов Сергей Константинович, Власкин К.И.
Журнал: Научное приборостроение @nauchnoe-priborostroenie
Рубрика: Приборные иследования и разработки для разных областей
Статья в выпуске: 4 т.21, 2011 года.
Бесплатный доступ
Выявлена неоднозначность определений "интеллектуальный датчик" как технического средства измерений. Обобщены причины и следствия различий в представлении "smart sensor" как измерительного преобразователя. Приведены основные положения международного стандарта IEEE 1451 по классификации интеллектуальных средств измерений. Представлены данные о функциональных возможностях датчиков феррозондового типа, используемых как "smart sensor", при создании измерительных и информационных технологий.
Объект измерения, измерительный преобразователь, архитектура интеллектуального датчика, феррозондовый сенсор
Короткий адрес: https://sciup.org/14264750
IDR: 14264750 | УДК: 681.584.311:
Smart fluxgate type sensors
The ambiguity of the definitions of "smart sensor" as a technical mean of measurement is revealed. Causes and consequences of differences in the representation of "smart sensor" as a transmitter were generalized. The main points of the international standard IEEE 1451 regarding classification of intelligent measuring instruments are presented. Data on the functionality of a fluxgate type sensor, which are used as "smart sensor" in the development of measurement and information technology, are presented.
Текст научной статьи Интеллектуальные датчики феррозондового типа
Понятие "интеллектуальный датчик" сложилось из различных словосочетаний и технических терминов в 50-х годах ХХ столетия, т. е. исторический период развития " smart sensor " составляет полвека. Однако единого определения интеллектуального датчика (ИД) как технического средства измерений в настоящее время не дано, а многочисленные существующие неоднозначны. Это объясняется тем, что глобальные технические открытия последних десятилетий, новые автоматизированные измерительные технологии умножают количество и разнообразие объектов измерения (ОИ), тем самым оказывают непрерывное влияние на развитие ИД: создают новые области применения; предъявляют новые, как правило, противоречивые требования; стимулируют проявление новых функций и свойств. Все это постоянно изменяет масштабы и формы представлений исследователей об ИД как о предмете современных и перспективных разработок.
С 09.1997 г. введен в действие Международный стандарт IEEE 1451 "Smart Transducer Interface Standards" [1]. В данном названии слово transducer является аналогом термина "измерительный преобразователь" (ИП), который определяется как "устройство, сочетающее функции восприятия проявлений ОИ с измерением, что обеспечивается содержанием измерительного тракта ИП". Техническое средство "сенсор", являясь составной частью измерительного тракта "transducer", исключено из названия стандарта IEEE 1451. Вместе с тем измерительный тракт ИП часто содержит элементы управления и логической обработки информационных сигналов и в таком случае термины "smart" и "transducer" если не синонимы, то во многом дублируют друг друга. Поэтому в текстах отечественной и иностранной литературы сино- нимом ИП является "smart sensor" [2]. Сенсорные стандарты IEEE 1451 определяют технические спецификации (ТС) и интерфейсы ИД, обеспечивая их интероперабельность (функциональную совместимость) как компонентов открытых систем. Стандарт IEEE 1451 дает определение ИД: smart sensor — датчик с интегрированной электроникой, выполняющий одну или несколько функций: логическую (собственно интеллектуальную); принятия решений (функцию управления); функцию двусторонней связи. Стандарт IEEE 1451 в соответствии с ТС дает определение архитектуры ИД [3]:
-
1. Sensor — первичный преобразователь (ПП) измеряемой физической величины в информационный сигнал.
-
2. Усилитель.
-
3. Аналоговый мультиплексор (если ИД многоканальный).
-
4. АЦП.
-
5. Процессор.
-
6. Память.
-
7. ИМС последовательных коммуникаций.
-
8. Служебные ФБ — функциональные блоки ( t º-компенсация и т. д.).
АНАЛИТИЧЕСКАЯ ЧАСТЬ
Введение в действие Международного стандарта IEEE 1451, однако, не сократило количество определений ИД. Так, например: "ИД — средства восприятия и измерения, оснащенные микропроцессором", "ИД — измерительные устройства, выполняющие кроме обычных функций ряд других, существенно расширяющих возможности и улучшающих их технические характеристики" [2, 4]. Причины различий определений: а) многообразие ОИ; б) многообразие функций, "индивидуаль- ность" ИД; в) гибкость структуры ИД. Не менее важная причина разночтения определений в том, что они рождались не столько в университетских и академических кругах, сколько в инженерных и коммерческих: разработкой, производством и реализацией ИД занимается множество фирм (Intel Labs, Sandia N.L., Siemens, Fujitsu, Mitsubishi, Метран, Мприбор и ряд менее известных). Определение датчика как "интеллектуальный" способствует его коммерческому успеху (включение микропроцессора в структуру стандартного сенсора увеличивает его стоимость в 2÷10 раз), повышает статус фирмы-производителя [2]. Естественно, особую активность в конкурентной борьбе за принадлежность к ИД проявили разработчики датчиков прямого преобразования, у которых в (1) f = k =const:
y = f ( x ), (1)
где х — измеряемая физическая величина; y — выходной информационный сигнал сенсора; f — функция преобразования.
В датчиках такого типа интеллектуальный ресурс процессора в основном растрачивается на служебные и вспомогательные функции (п. 6–8 ТС). Так, например, при адаптации к работе в загрязненной среде оптического датчика, функция f "источник—приемник" которого в нормальных условиях линейна, 65 % интеллектуального ресурса процессора отводится на защиту и очистку функциональных элементов (в том числе механическую) [5].
Если функция f датчика нелинейна (например, у манометров при больших давлениях, когда f отображается логарифмической характеристикой), для его "интеллектуализации" — линеаризации f требуется всего 5 % ресурса процессора [5].
Существуют датчики, у которых f — сложная функция а) комплекса x- аргументов, б) представленная системой уравнений независимых аргументов, в) требующая для определения y данные дополнительных датчиков, г) случайно изменяющихся аргументов. Такие датчики по существу представляют собой измерительные функциональные преобразователи, необходимо требующие включения процессора в структуру сенсора, т. е. являются ИД — интеллектуальными датчиками по определению IEEE 1451 и по ТС п.1, 3–8.
Типичным представителем ИД является гироскопический датчик. Функция преобразования всего лишь одного из трех директивных углов определяется, как
A . • Z / А /X . to* t + AX ,
A = ^ + arctg sin(фo - Аф) • tg----2----+ sin AX
+--, cosф0 • sin(^-1 + AX)
где: А — угол азимута между приборной осью Y и плоскостью географического меридиана; μ — угол между осью Y и линией узлов y (горизонтальная ось подвеса ротора гироскопа (РГ)); ω — угловая скорость вращения Земли; φ 0 — широта места установки гироориентатора; t — время движения гироскопического датчика, измеряемое с момента начальной выставки РГ; Δ φ , Δ λ — приращение координат по широте и долготе.
Очевидно, что для решения уравнения (2) гироскопический ИД требует ТС IEEE 1451 в полном объеме, более того, в гироскопический ИД необходимо поступают данные ω , t СГ , ∆φ , ∆λ по п. 8 ТС, чтобы решить (2) в п. 5. Следует отметить, что гироскопические ИД решают формулу (2) с 30-х годов XX века, когда МП не существовали.
Типичными представителями ИД являются магнитомодуляционные датчики, в частности феррозондового (ФЗ) типа. Известно, что у ФЗ как чувствительного элемента (ЧЭ) информационный сигнал сложной формы, т. е. представляет собой спектр f ∑ . Информационный сигнал содержит 4 информативных составляющих: амплитуду U 2 f , фазу, частоту 2 f , знак (+)/(–) вектора магнитного
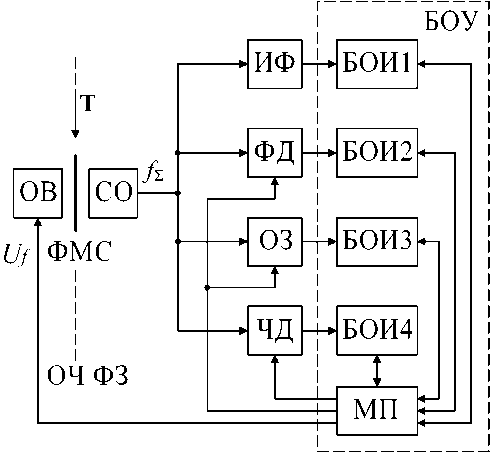
Рис. 1. ФЗ как многоканальный ИД.
Uf — напряжение возбуждения ФЗ с частотой f; ОВ — обмотка возбуждения ФЗ; СО — сигнальная обмотка ФЗ; ОЧ ФЗ — ось чувствительности ФЗ; ИФ — избирательный фильтр частоты 2f; ФД — фазовый детектор; ЧД — частотный детектор; ОЗ — определитель знака; МП — микропроцессор; БОИ1(2, 3, 4) — блоки обработки и индикации; T — измеряемое магнитное воздействие; ФМС — ферромагнитный сердечник; f∑ — спектр информационного сигнала ФЗ; БОУ — блок обработки и управления воздействия. Следовательно, ЧЭ ФЗ — многоканальный преобразователь, в котором формирователем 4 информативных параметров является единый источник — сигнальная обмотка (СО) ФЗ (см. рис. 1).
Функция "анализатор спектра" решается феррозондовым ИД по схеме рис. 2. Феррозондовый ИД, включенный в режиме градиентомера по рис. 3, решает систему векторных уравнений
<
T = 0;
U 2 f = grad A ,
где T — вектор малого градиента, в частности нормальное магнитное поле Земли (НМПЗ); A — магнитная аномалия, вектор большого градиента; U 2 f — информационный сигнал градиентомера.
Система уравнений (3) решается ИД методом специальной организации ЧЭ ФЗ, когда особое включение ОВ и СО и расположение полуэлементов ДФМС по сравнению со схемой рис. 1 превращает их в ОВ и СО [6], т. е. МП в решении системы (3) участия не принимает.
Функция решения комплекса задач — алгоритмических и вычислительных — выполняется в мультисенсорных структурах феррозондовых ИД, когда 2 и более ФЗ образуют единый измерительный модуль, размещенный в общем корпусе ("измерительная платформа").
Элементами архитектуры ФЗ-измерительного модуля могут быть, согласно ТС п. 8 IEEE 1451 дополнительные ФБ, функции которых составляют неотъемлемую часть алгоритмической обработки информационных сигналов феррозондовых ЧЭ. Так, по схеме рис. 4 решается задача вычисления магнитного азимута (2-компонентный ФЗ-компас). Для выполнения функции Z = 0 применяется гравитационный ориентатор, автоматически удерживающий измерительную платформу ФЗ-компаса в плоскости горизонта. При этом ИД решает систему уравнений
■ Z=0;
< X = U 2f • cos a; Y = U 'co s " sin a,
где Z — вертикальная составляющая МПЗ; U 2 si f n , U 2 co f s — информационные сигналы ортогональных ФЗ, размещенных на горизонтальной ( Z = 0) платформе; α — угол магнитного азимута; X , Y — горизонтальные составляющие МПЗ [7].
Мультипроцессорным ИД является 3-компонентный ФЗ ИД, в котором оси чувствительности трех ЧЭ ортогональны. В зависимости от назначения архитектура 3-компонентного ФЗ ИД может
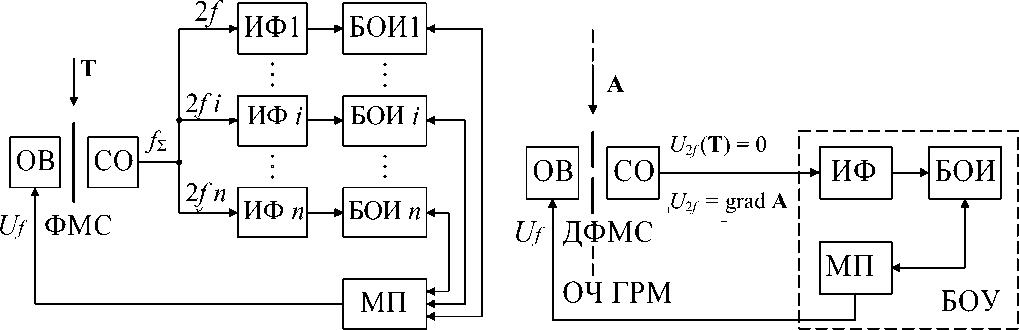
Рис. 2. ФЗ ИД как анализатор спектра.
ИФ — избирательные фильтры; 2 f i — составляющие спектра f ∑ , где i = 1, … , n ; U f , ОВ, СО, ФМС, T , МП, БОИ — по рис. 1
Рис. 3. ФЗ ИД в режиме градиентомера.
ДФМС — дифференциальный ФМС; ОЧ ГРМ — ось чувствительности градиентомера; A — вектор магнитного воздействия большого градиента; T — вектор магнитного воздействия малого градиента (в частности, МПЗ); СО — обмотка возбуждения ГРМ; ОВ — сигнальная обмотка ГРМ; U f , ИФ, ФМС, МП, БОИ, БОУ — по рис. 1
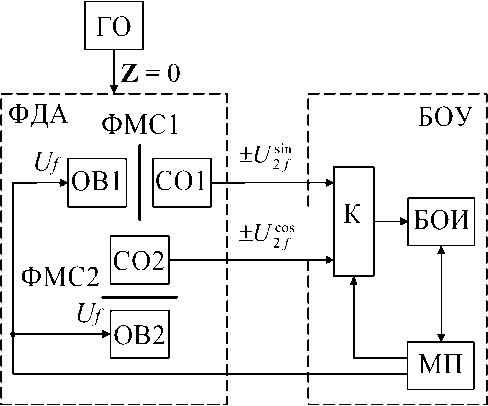
Рис. 4. Двухкомпонентный ФЗ-компас.
ГО — гравитационный ориентатор; ФДА — феррозондовый датчик азимута; К — коммутатор аналоговых сигналов; ± U 2f . ± U cos — информационные сигналы ФЗ; U f , ОВ, СО, ФМС, МП, БОИ, БОУ — по рис. 1
включать как вспомогательные ФБ, согласно п. 8 ТС IEEE 1451, так и источники дополнительных информационных сигналов по каналу последовательных коммуникаций, согласно п. 7 ТС IEEE 1451. Трехкомпонентный ФЗ ИД способен выполнять множество функций. Так, по формуле (5) решается функция вычисления магнитного α -азимута:
-
—Ту - sin ф - T - cos ф
а = arctg 7--------- X----^_JL ----г-------- . (5)
-
[ T X - cos ф - T Y - sin ф ] - cos 0 + T Z • sin 6
где θ, φ — углы наклона и поворота измерительной платформы ФЗ ИД, данные о которых поступают в ИД извне от дополнительных датчиков, согласно п. 7, 8 ТС IEEE 1451 [8].
Функция вычисления модуля полного вектора магнитного воздействия, в частности T-вектора МПЗ, решается трехкомпонентным ФЗ по формуле i т=ViXi1+lYi2+iZi2 ■
где X , Y , Z — ортогональные составляющие вектора T . Функция выполняется без дополнительных ФБ в архитектуре ИД, а также вне зависимости от ориентации измерительной платформы ФЗ в пространстве [9].
Функция вычисления модуля A — аномалии вектора T МПЗ решается трехкомпонентным ФЗ по формуле
I Al = IT - IT ol . (7)
где |T 0| = const — эквивалент. соответствующий уровню НМПЗ, содержащийся в памяти МП; T — текущее значение измеряемого МПЗ [10].
Таким образом, феррозондовые датчики являются высокоэффективными, многофункциональными средствами измерения, характеристики которых полностью соответствуют Международному стандарту IEEE 1451 и согласуются со всеми пунктами его технических спецификаций.
ВЫВОДЫ
-
1. Неоднозначность определений "smart sensor" осложняет проектирование и внедрение прогрессивных измерительных и информационных технологий.
-
2. Положения Международного стандарта IEEE 1451 способствуют систематизации понятий и определений отечественных и зарубежных интеллектуальных средств измерения.
-
3. Уровень решаемых задач, многообразие объектов измерения, совокупность технических характеристик и функциональных возможностей определяют принадлежность феррозондовых датчиков к основному ряду современных и перспективных "smart sensors".
