Интеллектуальные оптоэлектронные преобразователи перемещения на основе аналоговых оптомеханических сенсоров

Автор: Леонович Г.И., Токмак П.Л., Луганский Э.С.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 3 т.9, 2007 года.
Бесплатный доступ
Дан теоретический анализ оптоэлектронных преобразователей перемещения (ОПП) с волоконно-оптическими линиями связи между аналоговым оптомеханическим сенсором и электронным блоком, осуществляющим аналого-цифровое преобразование и обработку цифровой информации. Предложены варианты структурных схем интеллектуальных ОПП с автокоррекцией погрешности преобразования и конфигурированием параметров устройств с целью повышения достоверности информации и энергоэффективности ОПП.
Короткий адрес: https://sciup.org/148198003
IDR: 148198003 | УДК: 621.389;
Smart optoelectronic displacement transducers based on analog optomechanical sensors
This article is described the theoretical analysis of an optoelectronic displacement transducers with an optical fiber communication lines between an analog optomechanical sensor and electronic module, realizing an analog-digital conversion and data processing. Offered the different variants of structure charts of smart optoelectronic displacement transducers with a self-correction of conversion error and ability to configure settings with the purpose of increasing data adequacy and energy efficiency.
Текст научной статьи Интеллектуальные оптоэлектронные преобразователи перемещения на основе аналоговых оптомеханических сенсоров
Высокие требования к точности, надежности и экономичности управляющих и информационно-измерительных систем (ИИС) в SCADA – системах машиностроительных и энергетических комплексов создают предпосылки для активного внедрения интеллектуальных оптоэлектронных преобразователей перемещения (ОПП) с применением различных методов удаленного конфигурирования, автоматического контроля и коррекции инструментальных погрешностей [1-3].
В целом у этого класса преобразователей, отличающихся большим разнообразием, существует широкий спектр достоинств: высокая разрешающая способность, значительное быстродействие, малые габаритные размеры и масса, низкое энергопотребление, высокая устойчивость к эксплуатационным факторам, технологичность и низкая стоимость.
Наибольший вклад в интеллектуализацию ОПП вносит микроэлектроника, возможности которой позволяют максимально облегчить функциональную нагрузку и существенно упростить сенсорные оптомеханические узлы [4].
В этой связи важное значение приобретает защита удаленных сенсоров с передачей оптической информации по волоконно-оптическим линиям связи (ВОЛС) к электронному блоку от внешних и внутренних дестабилизирующих факторов, несанкционированного доступа к измерительным каналам.
В число последствий этих факторов входят: - искажение (до полной потери) инфор- мации, передающейся от сенсоров по ВОЛС к электронному блоку;
-
- потеря работоспособности сенсоров, ВОЛС и электронных блоков.
-
- рост энергопотребления вследствие деградации элементов, дефектов в ВОЛС, нарушения изоляции в электроцепях и т д.
С целью учета и реализации различных методов компенсации последствий воздействия указанных факторов авторами разработана математическая модель кодирующего сопряжения с волоконно-оптическим каналом передачи сигналов, структурные схемы и алгоритмы функционирования различных вариантов интеллектуальных ОПП, построенных на базе аналоговых оптомеханических сенсоров.
Структурная схема интеллектуального ОПП с аналоговыми оптмомеханическими сенсорами
Конструктивно ОПП выполняются в едином корпусе или разделены на два связанных между собой отдельных конструктивных блока: сенсор (датчик, первичный преобразователь) и электронный блок (вторичный преобразователь) [1, 3]. Сенсор устанавливается непосредственно на измеряемом объекте, функционирующем в жестких условиях эксплуатации. Сенсоры могут иметь корпусное или бескорпусное исполнение. В первом случае вал или шток ОПП сопрягается с объектом с помощью специальных муфт, во вто-
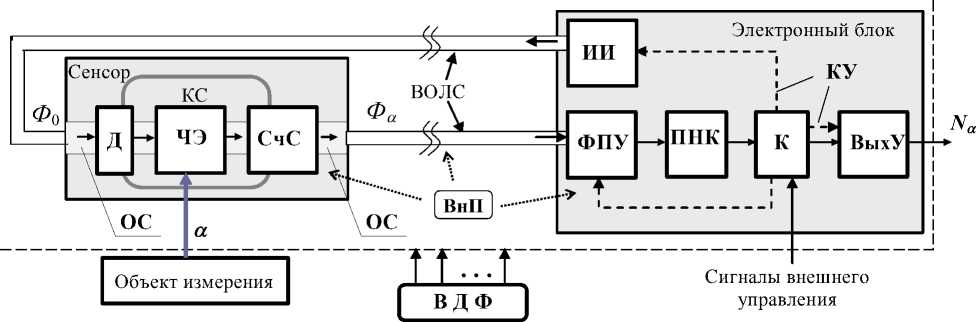
Рис. 1. Обобщенная структурная схема ОПП с ВОЛС:
ИИ – источник излучения; Д – диафрагма; ЧЭ – чувствительный элемент (шкала) ; СчС – считывающая система; КС – кодирующее сопряжение ЧЭ и СчЭ; ОС – оптическая система; ФПУ – фотоприемное устройство; ПНК – преобразователь напряжения в код; К – контроллер; КУ – каналы управления командами контроллера; ВыхУ – выходное устройство; ВДФ – внешние дестабилизирующие факторы; ВнП – внутренние помехи; α – линейное или угловое перемещение; N a – выходной код перемещения
ром – подвижная часть ОПП жестко совмещается с объектом и составляет с ним единое целое. Электронный блок выносится в комфортные условия эксплуатации с возможностью аппаратного контроля.
На рис. 1 показана обобщенная структурная схема ОПП с волоконно-оптической линией связи (ВОЛС) между сенсором и электронным блоком.
Световой поток Ф 0 от источника излучения (ИИ) проходит через оптическое волокно и оптическую систему с диафрагмой к чувствительному элементу (шкале). Шкала совместно со считывающей системой, состоящей из одного или нескольких считывающих элементов (СчЭ), формирует один или несколько оптических сигналов Ф a j ( j =1, 2,…), пропорциональных перемещению a. Далее световые лучи по ВОЛС направляются на фотоприемное устройство (ФПУ), в котором из них получаются аналоговые электрические сигналы, пропорциональные измеряемой величине. Электрические сигналы в ПНК (многоканальном или одноканальном с коммутацией входных сигналов) преобразуются в цифровой код и после алгоритмической обработки в контроллере поступают в выходное устройство, подключенное к входным каскадам системы управления.
В качестве ИИ обычно применяются микроминиатюрные лампы накаливания со световым потоком Ф =0,12…2,4 Лм, а также светодиоды и полупроводниковые лазеры с мощностью излучения Ри =1…50 мВт [1- 5].
Выбор ИИ определяется, в основном, длиной и параметрами ВОЛС, площадью и рисунком профилированных поверхностей диафрагм, модулирующих масок сенсоров и СчЭ, линейностью характеристик пропускания ВОЛС и чувствительности ФПУ, информационной емкостью ОПП и др. [1, 3].
Из ВОЛС наиболее широкое применение получили одно- и многомодовые волокна с центральной длиной волны пропускания l0= 850/1300/1550 нм [1-3, 5, 6]. Подвод и отвод светового потока от сенсора осуществляется посредством фоконов, фоклинов, граданов, микролинз и т.д. [1, 3].
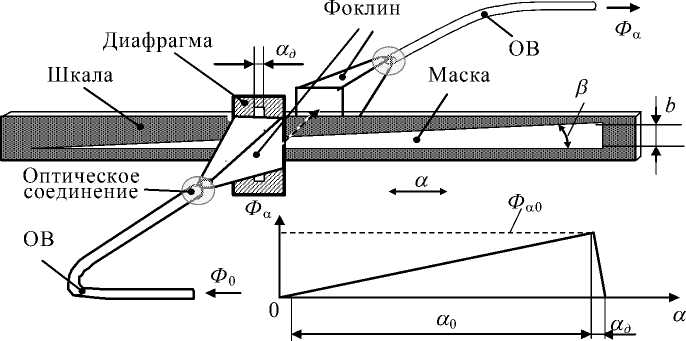
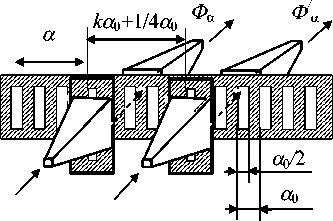
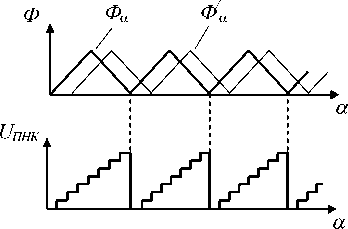
Шкала, как правило, представляет собой оптически непрозрачную пластину с нанесенной на нее тем или иным способом оптически прозрачной маской. Рисунок маски в соче- тании с алгоритмом расстановки и рисунками профилирующих поверхностей диафрагмы и СчЭ позволяет при перемещении шкалы однозначно идентифицировать направление и значение углового, линейного или многокоординатного перемещения. На рис. 2 показа- ны некоторые типы рисунков масок аналоговых однокоординатных шкал оптомеханических сенсоров (ОМС).
Самый простой вариант однокоординатной аналоговой маски шкалы (рис. 2,а) представляет плавно расширяющуюся оптически прозрачную дорожку, сопряженную с находящимися в одной плоскости диафрагмоαй и СчЭ. Оптический сигнал Φα ≈ Φ0 sin β , b где α = 0 α ; a - диапазон измерения. С це-
а)
Ф 0
б)
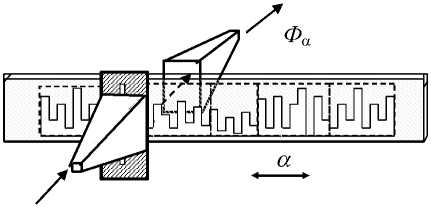
Рис. 2. Варианты однокоординатных масок чувствительных элементов ОПП:
а – аналоговая маска преобразователя линейных перемещений; б – квантованная маска преобразователя угловых перемещений; в – ступенчатая маска, реализующая многоуровневую цифровую амплитудную модуляцию с перемежением и помехоустойчивым кодированием
U ПНК
Квант 3
Квант 5
Квант1
Квант 2
Квант 4

α
в)
лью повышения точности и стабильности преобразования маска может выполняться в виде равномерно квантованной шкалы (КШ) из оптически прозрачных и непрозрачных участков с периодом a0 при ширине диафрагмы и СчЭ ад=ас=a0 /2 (рис. 2,б). В этом случае для идентификации направления перемещения внутри периода a0 требуется введение дополнительного СчЭ, смешенного относительно первого на расстояние (k +1 / 4)a0, где k=1,2,... , а для определения значения a во всем диапазоне перемещения – ввести реверсивный счетчик квантов [1]. Маска, реализующая амплитудную цифровую модуляцию, похожа на аналоговую, отличаясь ступенчатым изменением рисунка по всей шкале перемещения, либо в пределах кванта (рис. 2,в). В этом варианте возможно применение методов, соответствующих перемеже-нию и помехоустойчивому кодированию, характерных для многоуровневых цифровых сигналов. Тогда маска приобретает форму с псевдослучайно изменяемой высотой ступенек и ширины квантов по законам, известным в электронном блоке. Возможны сочетания приведенных рисунков в одной маске, а также формирование массы других чертежей диафрагм, масок и СчЭ, позволяющих идентифицировать перемещение и, как дополнительная функция, корректировать погрешность преобразования, вызываемую дестабилизирующими факторами [1].
В фотоприемном устройстве преобразованные оптические сигналы усиливаются до уровня, позволяющего осуществлять их аналого-цифровое преобразование в ПНК, подключенном к контроллеру.
Контроллер в простейшем варианте выполняет функции определения направления и значения перемещения по алгоритму, соответствующему схеме КС.
В интеллектуальных ОПП в функции контроллера входит:
передача в систему управления текущего значения перемещения и добавочных сигналов о выходе его за пределы заданных норм;
уменьшение искажений измерительной информации на пути от сенсоров к электронному узлу (ЭУ);
увеличение надежности измерения благодаря диагностике сенсоров, ВОЛС и элементов ЭБ;
построение мультисенсорных многофункциональных датчиков;
хранение значений измеряемой величины в памяти контроллера за заданный интервал времени с целью дальнейшего анализа работоспособности ОПП;
выбор диапазона измерения и информационной емкости сенсоров;
программирование ОПП для реализации алгоритмов измерения.
Для определения возможности интеллектуализации ОПП с аналоговыми сенсорами целесообразно исследовать математическую модель сенсора в совокупности с ВОЛС ввода и вывода светового потока.
Математическая модель аналогового сенсора с ВОЛС
Световой поток на входе фотоприемно-го устройства является функцией нескольких основных аргументов без учета квантовых шумов ИИ и шумов в ФП:
Фa= Ф0 f(Кa ,d)w1w2w3w4 , (1) где Ф0 – световой поток, формируемый ИИ; Кa – коэффициент изменения площади при перемещении a объекта, определяемый площадью геометрической проекции чертежей диафрагмы и маски на поверхности СчЭ; d – расстояние между шкалой и СчЭ; w1, w2, w3, w4 – коэффициенты передачи участков волок- на от ИИ до сенсора, от сенсора до фотоприемника, оптической системы сенсора и материала шкалы соответственно.
Практически все аргументы в (1), по разным причинам медленно или быстро, случайно или детерминированно изменяются во времени, а также в большей или меньшей степени зависят от температуры, давления, запыленности и других внешних эксплуатационных факторов (ВЭФ). Например, среднее значение светового потока от ИИ и коэффициентов передачи w1…w4 медленно уменьшается по экспоненте вследствие деградации материалов и загрязнения открытых участков оптических элементов. Изменение расстояния d определяется параметрами виброударных воздействий на сенсор, температурными перепадами.
Если маска состоит из квантованных участков, то необходимо учитывать погрешность дифракции и пространственного квантования. Искажения оптических сигналов в каналах связи обусловлены погрешностями стыковки волокон с оптическими элементами сенсора, ИИ и ФПУ.
Затухание в волокне обычно измеряется в дБ/км и определяется потерями на поглощение и на рассеяние излучения в оптическом волокне [3-6]:
-
- рэлеевское рассеяние на неоднородностях материала ОВ ( xр );
-
- рассеяние на конструкционных дефектах волокна ( xкд );
-
- собственное поглощение кварцевого
стекла ( xп );
-
- примесное поглощение ( xпр );
-
- поглощение на микро и макроизгибах
( xи );
-
- френелевское отражение ( xо );
-
- флюоресценция ( xф );
-
- рассеяние Рамана, Брюллюэна ( xРБ ).
В общем случае сигнал на выходе ОВ определяется выражением [6]
Г обйа= Оа-exp -LX- ,
V i = 1 7
где L – длина волокна; xi – коэффициенты за- тухания, которые могут иметь довольно сложную функциональную зависимость [1, 3, 4-7]. При удаленном сборе информации волокно может существенно ослабить аналого-
α
x
y
Y
Шкала
b
Ф 0
df
fo , квi- 1
Ω квi+
Ф с
d=d 0 + Δ d
X
Y
Ω СчЭ
p(X,x,Y,y )
b d
Рис. 3. Схема прохождения параллельного светового пучка через квантованную шкалу ОМС
вый сигнал, что без принятия специальных
мер приводит к резкому снижению достоверности информации.
Независимо от геометрической формы
элементов кодирующего сопряжения, световой поток на выходе k -го СчЭ определяется
выражением [1]
Oa k= OQKa = O. a
α k 0 α 0 ,
^ max
где Ф 0 – световой поток на входе диафрагмы; W a – геометрическая область прозрачности системы “диафрагма-шкала-СчЭ”, обра-
зуемая при перемещении объекта; W max – об-
ласть, соответствующая максимально
возможному совмещению чертежей масок шкалы и k -го СчЭ с чертежом диафрагмы.
В общем случае область пересечения
всех опорных областей равна
^ « = П ^ p = { « ( x, y, a ) = K to p ( x, y, a ) > 0 } , (4)
где top ( x , y , a ) - предикаты, формализующие область светового пятна на профилированной
поверхности СчЭ, редуцируемого в волокно
z
Z
и направляемого далее на чувствительную поверхность фотоприемника.
Количество и параметры опорных областей при отсутствии инструментальных погрешностей зависят от формы диафрагмы, СчЭ и маски ОМС, значения параметра перемещения a .
Если сенсор включает равномерно квантованную шкалу (КШ) из оптически прозрачных и непрозрачных участков, то реальные
геометрические размеры квантов, как правило, соизмеримы с расстоянием d от шкалы до СчЭ и намного больше нижней границы l н спектра излучения (рис. 3).
Комплексная амплитуда U p волны в точке Р наблюдения [1, 7]:
U = kU ( x, y, z ) ^Rd p 2πiR e n
Р
где R = ^ ( X - x ) 2 + ( У - y ) 2 + ( Z - z ) 2 , X, Y Z — координаты точки р наблюдения на плоскости
P считывания,
a
a
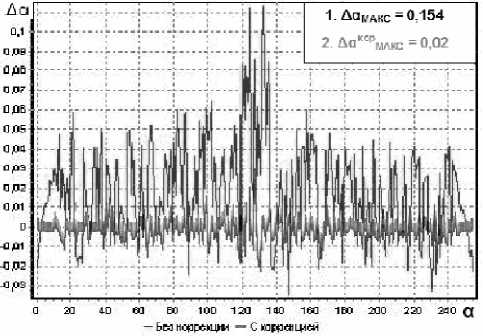
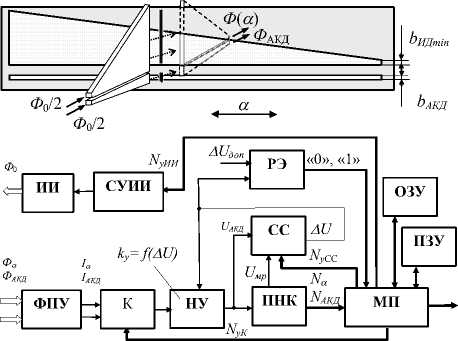
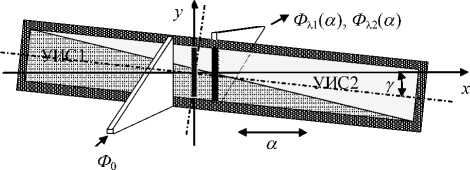
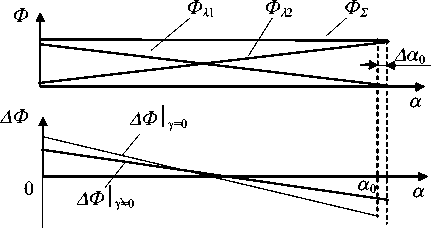
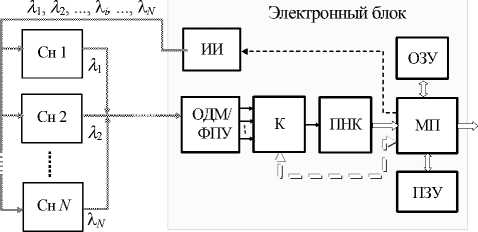
-— 2 x 2; bb < y < 2 2; z = 0; x, y, z - координаты точек волновой поверхности; U(x, y,z) – амплитуда световой волны на одном из отверстий шкалы, через которое проходит световой поток, dfn – проекция элемента площади волновой поверхности на плоскость СчЭ, перпендикулярную направлению волнового вектора k . Если считать, что U = U0 = const и Z = d, т.е. если плоская волна падает нормально к плоскости отверстия КШ, то имеет место дифракция Френеля, а амплитуда дифрагированной волны U = U x p 2πi a2 b2 exp (ik^(X — x)2 + (Y — У)2 + d2) (6) x ---\—'-dydx -v -/ V(X - x)2+ (Y - У)2+ d2 Интенсивность света на поверхности СчЭ [1, 3]: Ip(x, У, d = Up(x, y,d) 4-.J[c(X+)+C(X_)] +[s(X+)+5(X_)] lx x][C(i+)+C(Y_)]2+[S(Y?+)+5<>■’ ) 2 где v2 C(v) = [cos| nt- |dt, 5(v) = [si 0 I 2 )0 nt sin --- dt- < 2? интегралы Френеля. Функция считывания профилирующей поверхностью СчЭ определяется интегралом: H(Xd) = J ф(X, Y) • Ip (X, Y, Z)dsn Sd, где ϕ(X,Y) – функция распределения коэффициента передачи СчЭ по считывающей поверхности; dsn – проекция элемента площади СчЭ ds на плоскость, нормальную к направлению падения светового луча. Исходное расстояние d0 между диафрагмой и СчЭ и случайные вибрационные перемещения Δd шкалы (d=d0+Δd) определяют форму и степень осцилляции оптического сигнала на выходе СчЭ. На рис. 4 показан пример визуализации информации о влиянии виброударных воздействий на погрешность преобразования перемещения α в пределах кванта α0 при различных амплитудах d. Из графика видно, что погрешность имеет не- Рис. 4. График зависимости Aa(a, d) линейный характер, а диапазон осцилляций с ростом d увеличивается. Например, значение относительной погрешности, вызванной биениями шкалы вдоль оси Z, в16-разрядном ОПП доходит до 15% (потеря точности составляет 2…4 двоичных разряда в диапазоне перемещения α=0...50 мм). Это показывает, что такую погрешность необходимо учитывать и компенсировать при работе ОПП в жестких условиях эксплуатации. Для надежного (без опасности разрушения элементов) функционирования ОМУ начальное расстояние d0 выбирается из соотношения d0 > 2Admax . (8) Коррекция погрешностей ОМС Ряд погрешностей ОМС имеют доминирующий характер (перекосы и биения в направляющих, затухание и флуктуации светового потока), позволяя при расчетах пре небречь остальными. Для их учета и коррекции используются различные способыалгоритми-ческого и конструкционного характера [1]. Например, для коррекции погрешности Δα(α, d) в ОМУ вводится дополнительный измеритель расстояния между КШ и ИИ с вводом в ПЗУ контроллера поправок в код перемещения, полученных на этапе калибровки [8]. На рис. 5 изображен график зависимости Δα(α) при d =const до (линия 1) и после (линия 2) ввода коррекции. В приведенном в качестве примера ОПП (n=16, a=0...50 мм) при оцифровке параметра d в 128 позициях максимальное значение относительной погрешности снижается с 11 Рис. 5. Погрешность функции отклика: без автокоррекции (линия 1), с автокоррекцией (линия 2) до 2% (Δamax=2 мкм), что позволяет получить 14 достоверных разрядов кода перемещения. В основу построения ОМУ преобразователя, представленного на рис. 6, положена шкала, на которой выполнены две оптически прозрачные дорожки: автокалибрующая (АКД), и измерительная (ИД). Световой поток от источника излучения (ИИ) подается на ОМУ по одножильному оптическому волокну. Ширина АКД соответствует, как вариант, единице младшего разряда кода перемещения после аналого-цифрового преобразования сигнала Ua от ИД с учетом обеспечения заданного отношения сигнал/шум. Тогда при n=8 ширина ИД по диапазону измерения или кванту шкалы линейно изменяется от bИДmin = bАКД до bИДmax=bАКД(2n+1)=65 bАКД. Фактическое значение bАКД определяется из соотношений для амплитудно-кодовой модуляции, соответствующей преобразованию аналогового сигнала в цифровой код с допустимой вероятностью погрешности квантования в ПНК рq, равной вероятности ошибки ре=10-7...10-9 при передаче цифровых посылок по линиям связи [5, 6]. При этом необходимо учитывать удаленность L сенсора, параметры оптического волокна, ИИ, ФПУ, геометрию СчЭ, квантов КШ и ряд других характеристик [1, 5]. Алгоритм управления коэффициентом усиления kу нормирующего усилителя (НУ) основан на сравнении усиленного сигнала UАКД с выхода канала АКД с амплитудой UМР младшего разряда ПНК в период подключения ФП через коммутатор (К) к каналу АКД. Любое изменение kу, обусловленное зависимостью (1), приводит к появлению сигнала рассогласования ΔU=UАКД-UМР, которое подается в канал обратной связи НУ. Путем автоподстройки kу достигается значение ΔU=0. Такой алгоритм позволяет выставлять начальное значение светового потока от ИИ Ф0<Ф0 max и увеличивать его посредством схемы управления ИИ (СУИИ) при достижении максимально допустимого значения kу, что может существенно увеличить срок эксплуатации преобразователя до замены ИИ или ЭБ в целом. Для выявления и регистрации несанкционированного отъема информации, а также ситуаций, связанных с выходом из строя оптических и оптоэлектронных элементов, к схеме сравнения (СС) подключен решающий элемент (РЭ), фиксирующий в момент времени t+T резкое изменение ΔU и, соответственно, Δkу : А кУ = |ky, - kyt + Г| >A kydon , где Т – период считывания сигнала. С целью повышения энергетической эффективности ЭБ, а также для возможности спектрального уплотнения сигналов в одножильном волокне, светопропускающие слои шкалы выполняются из узкополосных интерференционных светофильтров (УИС) [9]. Сигналы с выхода ОВ поступают на оптический демультиплексор (ОДМ). Если в ОДМ используется перестраиваемый УИС, то он может по командам от контроллера выполнять коммутирующие функции при подключении к ПНК через общий для всех каналов ФП [10]. Это позволяет применить простую одноканальную схему нормирующего усилителя (НУ) сигналов Рис. 6. Структурная схема ОПП с автоподстройкой коэффициента усиления информационного сигнала Рис. 7. Влияние перекоса шкалы из двух профилированных УИС на форму оптических сигналов с выхода ФП для согласования с ПНК. На рис. 7 показана аналоговая шкала из двух УИС, в которой уменьшение светового потока Фl1 сопровождается увеличением Фl2. Перекос g шкалы относительно линии считывания приводит к изменению значений А Фа = ФХ1 (а)- Фх 2 (а) и Фе = Фл1 (а) + Фх 2 (а), которые можно учесть в контроллере с целью внесения коррекции на соответствующую перекосу величину погрешности кода перемещения. Спектральное уплотнение посредством УИС создает возможности для построения мультисенсорных ОПП (МОПП) с различными схемами подвода и отвода светового потока от сенсоров. При этом сбор информации может производиться в ждущем режиме. В этом случае применяется неэквидистантный метод уплотнения сигналов, существенно разгружающий канал связи при сохранении заданного уровня достоверности информации [11]. На рис. 8 представлена построенная по данному алгоритму структурная схема интеллектуального МОПП. Преобразователь включает N сенсоров, каждый из которых работает на одной (li) или группе (li1, li2,…, liM) волн. Сигналы сенсоров через ОДМ, ФПУ и коммутатор (К) поступают в ПНК, где преобразуются в цифровые коды, разрядность которых определяется параметрами чувствительности и диапазонами измерений. Особенностью алгоритма МП является адаптированность к скорости и ускорению перемещения с учетом заданных Рис. 8. Мультисенсорный ОПП со спектральным разделением каналов критериев. В этом случае задаются требуемые параметры устанавливаемых перемещений для каждого режима, скорость и ускорение процессов выхода на режим с соответствующими допусками. Для “обучения” МП в ОЗУ вводятся значения параметров в контрольных точках в процессе эталонного выполнения режимных операций. Заключение В интеллектуальных ОПП (ИОПП) с аналоговыми оптомеханическими сенсорами большинство функций преобразования и цифровой обработки информационных сигналов, алгоритмическую реализацию коррекции погрешности преобразования целесообразно переносить на вынесенный посредством ВОЛС электронный блок [1-3, 6, 8-11]. С учетом ограничений на передачу по ВОЛС аналоговых оптических сигналов, компромиссное решение заключается в использовании квантованных шкал и ступенчатых масок по принципу многоуровневой амплитудной модуляции, спектрального кодирования и уплотнения оптических сигналов посредством узкополосных интерференционных светофильтров. С ростом количества сенсоров существенно повышается энергоэффективность ИОПП. При этом, по своим характеристикам мультисенсорные ИОПП плотно приближаются к специализированным информационно-измерительным системам, нередко превосходя их по функциональным возможностям.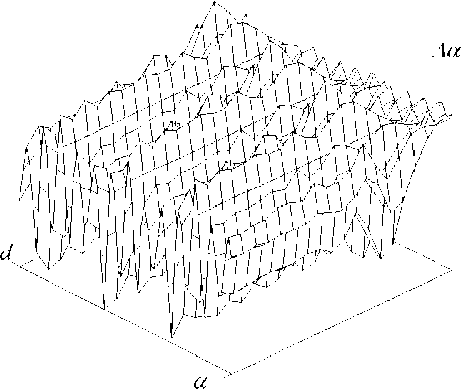
Список литературы Интеллектуальные оптоэлектронные преобразователи перемещения на основе аналоговых оптомеханических сенсоров
- Леонович Г.И. Оптоэлектронные цифровые датчики перемещений для жестких условий эксплуатации. Самара: Самарск. гос. аэрокосм. ун-т, 1998.
- Леонович Г.И., Салов А.Г. Автоматизированные системы контроля и учета энергии. М.: Машиностроение-1, 2007.
- Гречишников В.М., Конюхов Н.Е. Оптоэлектронные цифровые датчики перемещений со встроенными волоконно-оптическими линиями связи. М.: Энергоатомиздат, 1992.
- Зеленский В.А Гречишников В.М. Бинарные волоконно-оптические преобразователи в системах управления и контроля. Самара: Самарский научный центр РАН, 2006.
- Волоконная оптика. Сборник статей. М.: ВиКо, 2002.
- Демьяненко П.А, Зиньковский Ю.Ф., Прокофьев М.И. Измерительные преобразователи на основе волоконно-оптических датчиков -www.fotonexpress.ru
- Леонович Г.И., Ратис Ю.Л. Дифракция светового потока на чувствительных элементах волоконно-оптических и оптикоэлектронных датчиков механических перемещений/Компьютерная оптика. Выпуск 16, 1996.
- Леонович Г.И., Юнгов Ю.Н., Рощупкин М.С., Токмак П.Л., Луганский Э.С. Автоматизированная система моделирования и анализа функции отклика в оптоэлектронных цифровых преобразователях перемещения -АСМАФО//Датчики и системы-2005. Программа и тезисы докладов Междунар. научн.-техн. конф. Пенза, 2005 г.
- Леонович Г.И., Матюнин С.А. Использование метода спектрального кодирования в датчиках линейных и угловых перемещений//Микросистемная техника. 2001. №12.
- Матюнин С.А. Многокомпонентные оптронные структуры. Самара: Самарский научный центр РАН, 2001.
- Леонович Г.И., Башмаков А.В., Ковалев М.А., Пушкин С.Ю. Интеллектуальный оптоэлектронный цифровой преобразователь перемещений с функцией неэквидистантного кодирования и уплотнения информации//Материалы ВНТК "Актуальные проблемы радиоэлектроники и телекоммуникаций", 11-13 мая 2006 г. Самара, СГАУ, 2006.
