Интеллектуальный робастный регулятор на технологиях когнитивных вычислений. Ч. 1: модели когнитивного управления с эмоциональным обучением мозга

Автор: Шевченко Алла Александровна, Шевченко Андрей Владимирович, Тятюшкина Ольга Юрьевна, Ульянов Сергей Викторович
Журнал: Сетевое научное издание «Системный анализ в науке и образовании» @journal-sanse
Статья в выпуске: 4, 2020 года.
Бесплатный доступ
Системах управления и принятия решений в режиме реального времени эмоциональное обучение мозга является более предпочтительной методологией (по сравнению с методами на основе стохастического градиента и эволюционных алгоритмов) из-за своей низкой вычислительной сложности и быстрого робастного обучения. Для описания эмоционального обучения мозга была создана математическая модель - контроллер эмоционального обучения мозга (BELC). Проектирование интеллектуальных систем, основанных на эмоциональных сигналах, строится с применением методов управления на основе технологий мягких вычислений: искусственных нейронных сетей, нечеткого управления и генетических алгоритмов. На основе смоделированной математической модели млекопитающих BEL разработана архитектура контроллера под названием «Интеллектуальный регулятор на основе эмоционального обучения мозга» (англ. BELBIC - Brain Emotional Learning Based Intelligent Controller) - нейробиологически мотивированный интеллектуальный регулятор, основанный на вычислительной модели эмоционального обучения в лимбической системе млекопитающих. В статье описаны модели интеллектуальных регуляторов на основе эмоционального обучения мозга. Возможности обучения, многоцелевые свойства и низкая вычислительная сложность BELBIC делают его перспективным инструментом для применения в приложениях реального времени.
Когнитивные вычисления, когнитивное управление, эмоциональное управление мозга, когнитивный регулятор
Короткий адрес: https://sciup.org/14123329
IDR: 14123329 | УДК: 004.415.2,
Intelligent robust controller based on cognitive computing technologies. Pt. 1: cognitive control models with the brain emotional learning
In on-line control and decision-making systems, emotional brain training is a preferred methodology (compared to stochastic gradient-based and evolutionary algorithms) due to its low computational complexity and fast robust learning. To describe the emotional learning of the brain, a mathematical model was created - the brain emotional learning controller (BELC). The design of intelligent systems based on emotional signals based on control methods as soft computing technologies: artificial neural networks, fuzzy control and genetic algorithms. Based on the simulated mathematical model of mammals BEL, a controller architecture has been developed. Applied approach called “Brain Emotional Learning Based Intelligent Controller” (BELBIC) - a neurobiologically motivated intelligent controller based on a computational model of emotional learning in the mammalian limbic system. The article describes applied models of intelligent regulators based on emotional learning of the brain. BELBIC's learning capabilities; versatility and low computational complexity make it a very promising toolkit for on-line applications.
Текст научной статьи Интеллектуальный робастный регулятор на технологиях когнитивных вычислений. Ч. 1: модели когнитивного управления с эмоциональным обучением мозга
INTELLIGENT ROBUST CONTROLLER BASED ON COGNITIVE COMPUTING TECHNOLOGIES.
PT. 1: COGNITIVE CONTROL MODELS WITH THE BRAIN EMOTIONAL LEARNING
Shevchenko Alla1, Shevchenko Andrey2, Tyatyushkina Olga3, Ulyanov Sergey4
-
1Postgraduate PhD Student;
Dubna State University;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
-
2Postgraduate PhD Student;
Dubna State University;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
-
3PhD, associate professor;
Dubna State University;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
-
4Doctor of Science in Physics and Mathematics, professor;
Dubna State University;
141980, Dubna, Moscow reg., Universitetskaya str., 19;
Shevchenko A., Shevchenko A., Tyatyushkina O., Ulyanov S. Intelligent robust controller based on cognitive computing technologies. Pt. 1: cognitive Control models with THE BRAIN emotional learning. System Analysis in Science and Education, 2020;(4):90–134(In Russ). Available from: DOI: 10.37005/2071-9612-2020-4-90-134.
Введение: Интерфейсы «Мозг – Компьютер – Устройство» и технологии когнитивных вычислений
Интерфейс «мозг-компьютер» (ИМК) повсеместно применяется в когнитивных интеллектуальных системах практически во всех сферах жизни. Однако, для полномасштабного применения и взаимодействия этих систем как между собой, так и с пользователями, уровень интеллектуальности ИМК все еще находится на недостаточном для продуктивного применения уровне. ИМК требуют системного подхода, фильтрации и структуризации информации. Две парадигмы построения ИМК: глубокое обучение и обучение без учителя, представляют собой вычислительные абстракции механизмов, заложенных в коре головного мозга (ГМ). Эксперименты демонстрируют [1], что, например, чувство восприятия человеком понятия числа может быть приобретено без явного контроля со стороны эксперта, который свободно участвует в манипуляциях с объектами. По аналогии с ГМ человека, нейронная сеть наблюдает за манипуляциями над набором объектов и учится предсказывать действия. Образ изображения, который создается в процессе, определяет закономерности, придающие модели ряд новых свойств и может быть использовано для эффективного управления событиями как новый для традиционной теории управления инструментарий.
Во-первых , модель обнаруживает структуру, лежащую в основе целых чисел. Первые несколько чисел, например, от нуля до восьми, появляются как категории в результате обучения на основе соответствующих изображений. Во-вторых , появление числовых категорий позволяет мгновенно классифицировать количество объектов. Это описывает хорошо известную способность человека, называющуюся субитизацией – функцией восприятия, обеспечивающей моментальное определение количества предметов в поле зрения, когда это количество укладывается в диапазон от одного до четырёх. В-третьих , модель спонтанно создает линейную структуру, где изображения упорядочиваются по количеству. Это предсказание сильно напоминает мысленную числовую линию, которая постулируется в литературе по психологии [2–5].
Примечание . В недалёком будущем, усиление физических, сенсорных и когнитивных функций человека может осуществляться так называемыми сопроцессорами – устройствами, которые используют искусственный интеллект для объединения декодирования и кодирования в единой системе и оптимизируют паттерны нейронной стимуляции для достижения конкретных целей, посредством использования внешних исполнительных механизмов, таких как экзоскелеты, роботизированные руки или даже бронежилеты в стиле «Железного человека», для применения в пожаротушении, ядерной промышленности и поддержании правопорядка. Сенсорное усиление ГМ может включать в себя усиление способности мозга воспринимать объекты за пределами видимого спектра, путем предоставления в качестве входных данных с инфракрасных, гиперспектральных, ультразвуковых, лазерных или других типов датчиков. Когнитивное усиление может быть достигнуто множеством способов, например, путем предоставления возможности сопроцессору расширять знания и способы обработки информации за счет быстрого доступа в Интернет.
В [6] рассматриваются интерфейсы, сочетающие функции записи и стимуляции – это двунаправленные (или рекуррентные), в них используются отдельные компоненты системы «ИМК – ИКМ», что делает их частными случаями более унифицированной концепции сопроцессоров мозга.
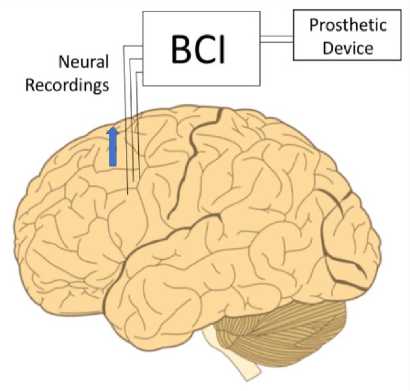
На рис. 1 изображен общий вид сопроцессора мозга, использующий ИМК для преобразования нейронной активности в управляющие сигналы для внешних исполнительных механизмов.
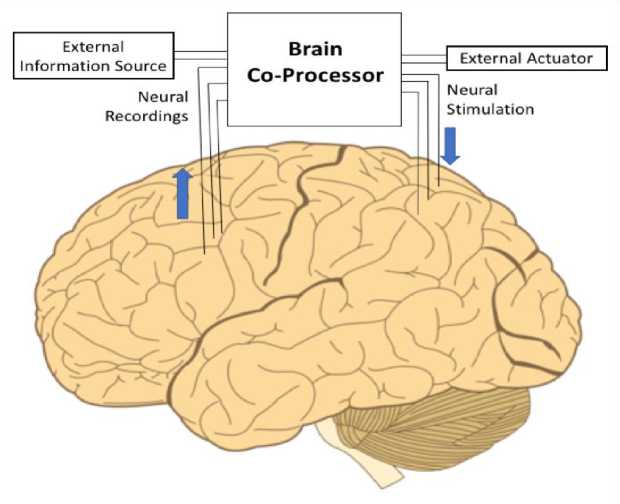
Рис. 1. Общий вид сопроцессора мозга
В качестве входных данных в сопроцессоры могут быть:
-
- нейронные сигналы: всплески или локальные потенциалы в микроэлектродах, электрическая активность на основе ЭКоГ или ЭЭГ, оптические / оптогенетические сигналы, а также изменение кровотока на основе фМРТ или фНИРС исследований;
-
- внешние источники информации: датчики (инфракрасные, ультразвуковые и т. д.), интернет, локальное запоминающее устройство, источник ввода данных пользователем.
Выходы сопроцессора включают:
-
- многомерные модели нервной стимуляции, например, стимуляция через микроэлектрод или матрицы ЭКоГ, оптическая стимуляция с помощью оптогенетических методов, сфокусированная ультразвуковая стимуляция и магнитная стимуляция.
-
- управляющие сигналы для внешнего исполнительного механизма, такие как команды для робота, вычислительного устройства, поисковой машины в Интернете или сообщения для другого мозга.
Алгоритмы, реализованные на сопроцессоре для преобразования его входных данных в выходные, могут быть алгоритмами искусственного интеллекта, начиная от простых сопоставлений или правил, основанных на медицинских знаниях, до сложных алгоритмов машинного обучения для классификации, регрессии или обучения с подкреплением.
Сопроцессоры мозга могут использоваться для восстановления сенсорных или моторных функций, например, восстановления зрения, управления роботизированной рукой, реанимации парализованной конечности, модуляции нейронных цепей для облегчения симптомов моторных или когнитивных расстройств, индукции нейропластичности для целевой реабилитации пораженного мозга.
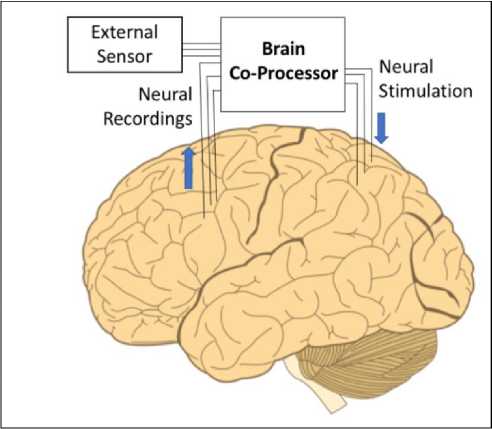
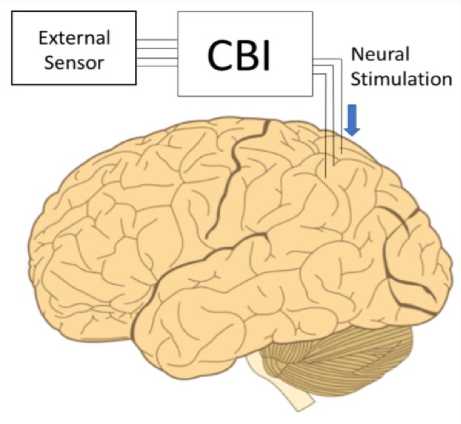
На рис. 2А показан традиционный сенсорный протез для слабовидящих.
(А) (Б)
Рис. 2. Сенсорные протезы. (A) Традиционный сенсорный протез, например, визуальный протез, основанный на ИКМ (англ. CBI – Computer Brain Interface). (B) Сопроцессор мозга для сенсорного восстановления / увеличения: помимо кодирования сенсорной информации, сопроцессор принимает во внимание текущую динамику мозга, чтобы адаптировать его схему стимуляции для надежного восприятия
Изображения с камеры преобразуются в паттерны стимуляции через ИКМ, который реализует простой алгоритм кодирования, например, преобразование значений пикселей в градациях серого, усредненных по области изображения, в пропорциональное значение частоты или амплитуды для импульсов стимуляции, доставляемые в визуальные области ГМ. Результаты работы таких устройств неоднозначны. Одна из причин, вероятно, заключается в том, что этот подход не принимает во внимание основную динамику нейронной активности стимулируемой области. В результате влияние одних и тех же параметров стимуляции на группу нейронов может варьироваться от одного случая стимуляции к другому из-за продолжающейся нейронной динамики. Это приводит к различиям в восприятии. Аналогичные ограничения применяются к искусственной стимуляции в таких модальностях как соматосенсорная стимуляция [7, 8].
Вариант применения сопроцессора мозга для создания сенсорных протезов изображен на рис. 2 Б . Сопроцессор использует в качестве входных данных не только значения датчиков (например, значения пикселей изображения с камеры), но и текущие нейронные записи стимулируемой области, а также нейронные записи других участков ГМ, имеющих отношение к восприятию. Таким образом, изначально алгоритм ИИ сопроцессора учитывает как текущую нейронную динамику, так и внешние сенсорные входные данные, чтобы вычислить шаблоны стимуляции, соответствующие текущему состоянию мозга, для достижения устойчивого восприятия.
Настройка алгоритмов искусственного интеллекта – ИИ – (например, веса искусственных нейронных сетей) может основываться на обратной связи субъекта для оптимизации параметров устойчивого восприятия.
Традиционные ИМК (рис. 3 A ) декодируют нейронные записи из одного или нескольких участков ГМ (например, моторной коры) для управления протезными устройствами, такими как роботизированная рука, рука для восстановления двигательной функции или курсор для общения. В качестве алгоритма ИИ, используемого для декодирования, часто выступает фильтр Калмана [9, 10]. Обычно неизвестные кинематические величины, которые необходимо оценить, такие как положение руки, скорость и ускорение, представлены «вектором состояния» x .
Модель правдоподобия (или измерения) для фильтра Калмана определяет, как «скрытый» кинематический вектор xt в момент времени t соотносится (линейно через матрицу B ) с измеренным вектором нейронной активности yt:
Ус = Bxt + mt.
Модель динамики определяет как xt линейно изменяется (через матрицу A ) во времени:
Xt = ^%t-1 + «t,
nt и mt - гауссовские шумовые процессы с нулевым средним.
( А ) ( Б )
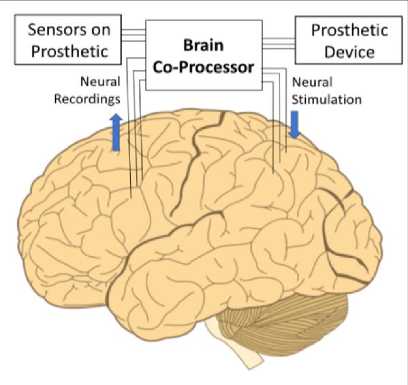
Рис. 3. Ортопедический контроль. (A) Традиционный BCI или BMI (интерфейс мозг-машина) для контроля протезирования. (B) Мозговый сопроцессор для управления протезом с обратной связью
Фильтр Калмана вычисляет для каждого временного состояния t оптимальную оценку кинематического вектора xt (как среднего, так и ковариационного) с учетом текущего измерения xt и всех прошлых измерений – уравнения для вычисления нулевого среднего и ковариации можно найти в [10].
Фильтр Калмана может использоваться в ИМК при декодировании активности ГМ для управления протезом – субъект в этом случае полагается на визуальную обратную связь для изменения активности мозга для управления с обратной связью. Однако, одной только визуальной обратной связи недостаточно для точного управления протезом, например, для определения силы, прилагаемой для удержания бумажного стаканчика по сравнению с керамической чашкой, или для обнаружения скольжения удерживаемого объекта. В таких случаях ГМ требуется обратная связь от искусственных тактильных и проприоцептивных датчиков протеза.
Сопроцессор мозга, показанный на рис. 3Б, позволяет управлять протезом по замкнутому циклу путем объединения записи и стимуляции в единую структуру. Входные данные сопроцессора объединяют внешние измерения от тактильных и проприоцептивных датчиков с нейронными сигналами моторных и сенсорных участков ГМ. Двигательные нейронные сигналы декодируются алгоритмом ИИ для генерации сигналов управления протезом руки. Тот же алгоритм используется для кодирования информации искусственных датчиков протеза в сочетании с нейронными записями сенсорных областей, чтобы соответствующим образом стимулировать соматосенсорные нейроны для тактильной и проприоцептивной обратной связи. Важным требованием к такому сопроцессору является то, что артефакты, генерируемые стимуляцией, не должны искажать записанные сигналы, используемые для управления рукой; в [11–14] описаны примеры методов обработки таких артефактов стимуляции.
Хотя структура сопроцессора на рис. 3 Б еще не полностью протестирована, несколько исследовательских групп тестировали сопроцессор для управления протезом.
Пример . На рис. 4 показано, как сопроцессор мозга можно использовать для восстановления или замены утраченной функции путем модуляции текущей динамики нейронных цепей или передачи информации из одной области мозга в другую, минуя поврежденную область.
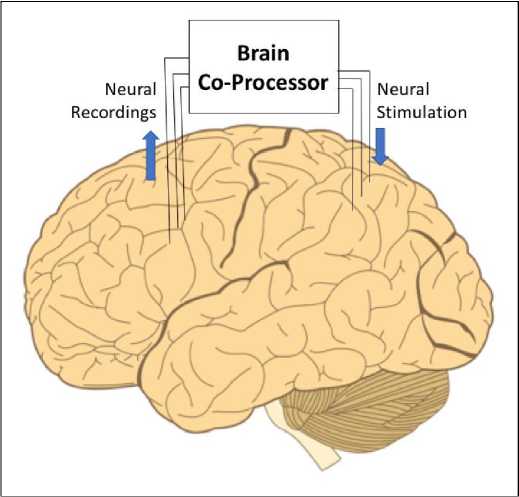
Рис. 4. Мозговый сопроцессор для нейромодуляции и индукции пластичности. Сопроцессор головного мозга может преобразовывать нейронные записи из одной области мозга в соответствующие модели стимуляции, доставляемые в другую область мозга, для (а) модуляции текущей динамики нейронных цепей для исправления нежелательного поведения и симптомов, таких как тремор, (б) замены потерянной функцию, имитируя поврежденную нервную цепь и передавая информацию из одной области мозга в другую, минуя поврежденную область, и (c) вызывают нейропластичность, используя принцип пластичности Хебба (подробности см. в тексте)
Одним из первых в этой области был Хосе Дельгадо [15], разработавший имплантируемый ИМК, названный стимосивером, который мог связываться с компьютером по радиосвязи. Дельгадо соединил функции декодирования и кодирования для формирования поведения: его алгоритм декодирования обнаруживал веретена в миндалине обезьяны и для каждого обнаружения запускал стимуляцию ретикулярной формации, которая связана с отрицательным подкреплением. Через шесть дней активность веретена снизилась до 1% от нормального уровня, в результате чего обезьяна стала тихой и замкнутой. Попытки применить данный подход для лечения депрессии и других расстройств у людей дали противоречивые результаты, возможно, из-за отсутствия крупномасштабных и точных методов записи стимуляции, вычислительной мощности и сложных структур ИИ для декодирования и кодирования.
Работа Дельгадо в итоге вдохновила на создание коммерческих имплантатов, таких как система RNS от Neuropace , определяющая начало приступов с помощью временно-частотных методов обработки ЭКоГ и стимулирует область, в которой возникает приступ. Работа Дельгадо стимулировала создание техники глубокой стимуляции мозга (англ. Deep Brain Stimulation , далее – DBS ), широко применяемой формой нейростимуляции для уменьшения тремора и восстановления двигательной функции у пациентов с болезнью Паркинсона. Существующие системы DBS являются разомкнутыми, но исследователи недавно продемонстрировали DBS с замкнутым циклом [16] путем запуска DBS на основе распознавания намерения движения, декодированного как уменьшение мощности ЭКоГ в низкочастотном диапазоне над моторной корой.
Сопроцессор на рис. 5 также можно использовать для индукции пластичности и изменения нейронных связей. Принцип пластичности Хебба гласит, что если группа нейронов A последовательно срабатывает раньше другой группы нейронов B , связи от группы A к группе B должны быть усилены, поскольку это указывает на причинно-следственную связь от A к B .
(А)
(Б)
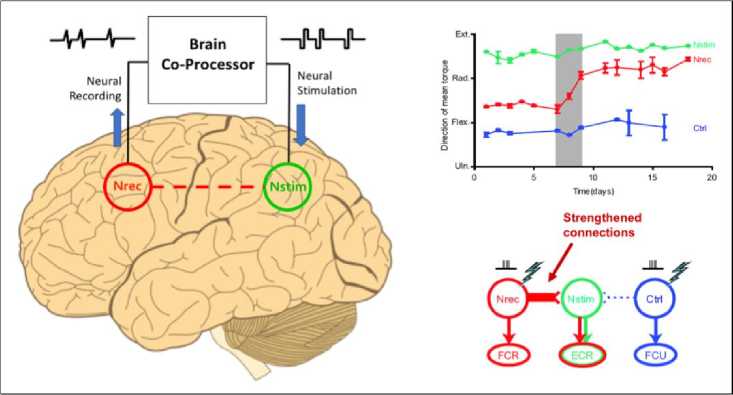
Рис. 5. Усиление связей между корковыми нейронами с помощью сопроцессора. (A) Сопроцессор, называемый «нейрочип», доставляет двухфазный импульс стимуляции в кортикальный сайт Nstim для каждого спайка, обнаруженного в месте записи Nrec. Это искусственное соединение корковых узлов продолжалось при естественном поведении в течение двух дней. Пунктирная линия указывает на возможные слабые существующие связи между Nrec и Nstim. (Б) После двух дней искусственного соединения через сопроцессор между Nrec и Nstim (серая область, верхняя панель) было обнаружено, что стимуляция Nrec привела к тому, что средний крутящий момент (красный) ближе к крутящему моменту для Nstim (зеленый) , по сравнению со стимуляцией контрольного сайта (синий, Ctrl). На нижней панели показано объяснение этих результатов [17]
Такая пластичность может быть искусственно вызвана в моторной коре приматов путем запуска стимуляции места Nstim через несколько миллисекунд после того, как спайк был зарегистрирован в другом месте Nrec (см. рис. 5А) [17]. В этом случае алгоритм ИИ представляет собой простое преобразование 1 к 1 от одного входного пика к одному выходному импульсу стимуляции.
После двух дней такой непрерывной стимуляции, запускаемой спайком, выходной сигнал, генерируемый Nrec , изменится и станет напоминать выходной сигнал Nstim (см. рис. 5Б, верхняя панель), что соответствует усилению существующих синаптических связей между нейронами в Nrec и нейронами в Nstim (рис. 5Б, нижняя панель).
Вышеупомянутый метод может быть полезен для нейрореабилитации, поскольку укрепление слабых связей и, в более общем плане, перестройка ГМ, могут позволить восстановить функцию мозга после черепно-мозговой травмы, инсульта или при нервно-психических расстройствах, таких как депрессия и посттравматическое стрессовое расстройство (ПТСР). Например, Гуггенмос, Нудо и его коллеги [18] использовали такой подход для улучшения функций захвата у крыс после черепно-мозговой травмы первичной моторной коры. Искусственное соединение было создано сопроцессором, соединяющим премоторную кору ГМ крысы (ростральная зона передних конечностей или RFA ) и соматосенсорную кору S 1. Для каждого всплеска, обнаруженного электродом в RFA , сопроцессор доставил электрический импульс на S 1 через 7,5 миллисекунд, что привело к улучшению способности крысы захватывать объекты.
Небольшое количество сопроцессоров, таких как глубокие стимуляторы мозга и замкнутая система стимуляции Neuropace RNS для контроля эпилепсии, используются в медицинских целях, но подавляющее большинство сопроцессоров мозга все еще находятся на стадии «лабораторных испытаний».
Рассмотрим, например, простейший вариант сопроцессора мозга, ИМК, показанный на рис. 3A. Он записывает сигналы ГМ и декодирует эти сигналы для управления курсором. Максимальная скорость передачи данных, достигаемая человеком, использующим такую систему с инвазивной многонейронной записью, в настоящее время составляет около 3,7 бит/сек и 39,2 корректных символа в минуту [19]. Это на порядок ниже, чем средняя скорость набора текста человеком: 150–200 символов в минуту. Необходимо добиться значительного прогресса в увеличении пропускной способности и надежности декодированной информации. Однако, учитывая быстрые успехи в этой области за последнее десятилетие и появление коммерческих предприятий в этой сфере, сопроцессорные приложения могут начать появляться на рынке в течение следующих нескольких десятилетий, если не раньше.
Помимо медицинских приложений, сопроцессоры мозга потенциально могут быть использованы для увеличения возможностей человеческого ГМ.
Сопроцессор может служить вспомогательным устройством во время получения знаний, отслеживая прогресс ученика, отслеживая удержание внимания, проводя уроки, адаптированные к оптимальному темпу обучения ученика, и т. д. Кроме того, способность сопроцессоров побуждать пластичность за счет стимуляции с замкнутым контуром потенциально может быть использована для ускорения приобретения знаний и навыков или даже для передачи знаний от одного ГМ другому [20]. В конце концов, возможность проверить, усвоил ли студент концепции курса напрямую, отслеживая соответствующие изменения в своей мозговой активности, может избавить от необходимости экзаменов и тестов.
Очевидное применение — использование сопроцессоров мозга для стимуляции мозга с обратной связью для высокоточной виртуальной / дополненной реальности (англ. Virtual Reality , Augmented Reality , далее – VR , AR ) и игр. Доказательная концепция VR -игры, основанной на стимуляции мозга, описана в [21]. В отличие от сегодняшних гарнитур VR / AR , которые ограничены предоставлением визуальных и слуховых сигналов, системы VR на основе стимуляции мозга потенциально позволят получить полный сенсорный опыт, включая искусственный запах, вкус, проприоцепцию, голод, жажду и соматические ощущения, такие как прикосновение, тепло, давление и боль. Однако создание реалистичных ощущений посредством стимуляции потребует значительного прогресса в осознании основы этих ощущений в естественных условиях.
Пример. Рассмотрим проблему восстановления двигательного аппарата у пациента с инсультом или травмой спинного мозга. Например, позволяя руке дотянуться до целевого объекта (см. рис. 6). Сопроцессорная нейронная сеть (англ. Co-Processor Network, далее – CPN), используется для сопоставления входных шаблонов нейронной активности в одном наборе областей A1, A2, ... An с выходными шаблонами стимуляции в других областях B1, B2, ...., Bn. Веса оптимизированы для минимизации оши бок, связанных с активностью ГМ.
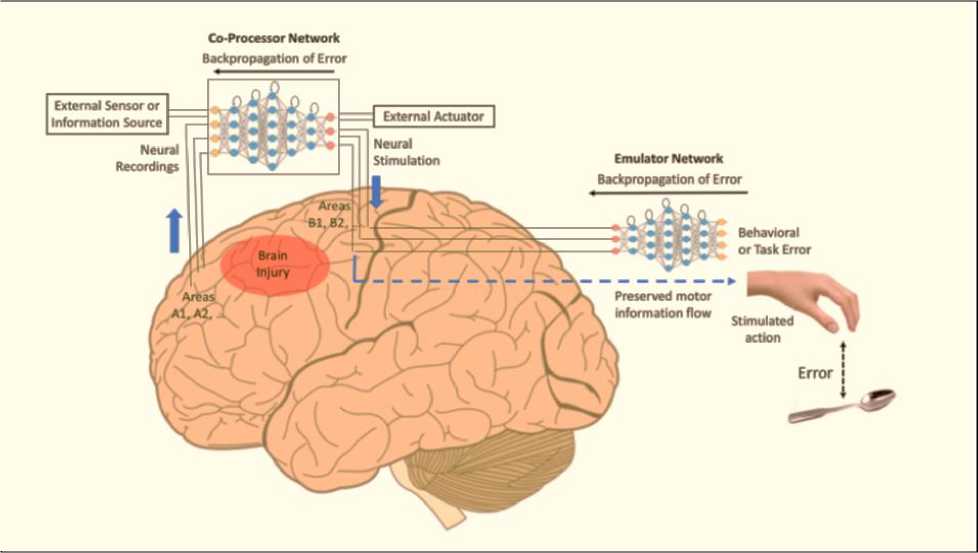
Рис. 6. Нейронный сопроцессор для восстановления и улучшения функций мозга
Для минимизации поведенческих ошибок или ошибок решаемой задачи, используется так называемая сеть эмулятора (англ. Emulator Network , далее – EN ), разработанная и предварительно обученная (например, с помощью обратного распространения ошибки) на изучение биологической трансформации от моделей стимуляции или нейронной активности до результирующих поведений. На основе данных, полученных с помощью EN , CPN обучается создавать оптимальные модели стимуляции, тем самым создавая обходной путь обработки информации между входными областями A1, A2,…, An и выходными областями B1, B2, …., Bn . Внешняя информация от искусственных датчиков или других источников информации может быть интегрирована в CPN в качестве дополнительных входов в нейронную сеть, а выходы CPN могут включать управляющие сигналы для внешних исполнительных механизмов. Пример на рис. 6 показывает, как CPN создает новый путь обработки информации между префронтальной корой и моторной корой, минуя промежуточную область, пораженную травмой.
Сопроцессоры мозга могут открыть дверь для персонализированных развлечений, где контент может адаптироваться не только к общим предпочтениям человека, но и к текущей активности мозга.
Возможность касаться, видеть и ощущать с помощью богатых сенсорами роботизированных «аватаров» в удаленных местах в сочетании с сопроцессором, передающим ощущения посредством стимуляции, открывает возможность сверхреалистичного телеприсутствия, представляя потенциальную угрозу для индустрии авиаперевозок.
Методы детектирования лжи и «отпечатков пальцев» ГМ для идентификации на основе ЭЭГ и фМРТ уже были предложены [22, 23], но недостаточная точность этих методов помешала их применению в правоохранительной области. Методы замкнутого цикла, основанные на сопроцессорах, могут в итоге повысить точность детектирования лжи и биометрии на основе активности ГМ до приемлемого уровня для использования в реальном мире при условии, что этические проблемы могут быть удовлетворительно решены.
Специалист по маркетингу может быть заинтересован в оценке реакции человека на рекламу и в отслеживании интереса человека к продукту, путем отслеживания и изучения сигналов его мозга. Сопроцессор потенциально может научиться отслеживать и даже предсказывать интересы человека с течением времени, поскольку он взаимодействует с мозгом человека. Хотя такое приложение в настоящее время невозможно, тем не менее возникает важный вопрос этики этих типов приложений.
Возможность расширения человеческих способностей с помощью сопроцессоров мозга выдвигает на первый план острую необходимость выявления и решения вопросов этической, моральной и социальной справедливости, прежде чем эти технологии станут достаточно применимыми для коммерциализации.
Наиболее мощные сопроцессоры, вероятно, будут инвазивными и потребуют имплантации, что потребует от пользователя анализа рисков для здоровья и преимуществ технологии. Оправдывает ли повышение производительности, обеспечиваемое инвазивным сопроцессором (по сравнению с неинвазивным), увеличение риска, связанного с инвазивными устройствами?
Другие вопросы, которые следует учитывать, включают потенциальные непредвиденные побочные эффекты использования сопроцессора, вероятность того, что ожидания пользователя не оправдаются после имплантации, а также влияние на семью и лиц, осуществляющих уход.
Использование сопроцессора может изменить поведение пользователя в долгосрочной перспективе, тем самым влияя на его самоидентификацию [24]. Более того, в некоторых случаях пользователь может почувствовать, что он потерял чувство свободы воли и уступил контроль сопроцессору [25]. Устранение и смягчение этих потенциальных угроз об общих представлениях о человеке и наличии свободы воли, будет критически важным требованием для будущих сопроцессоров.
На рис. 7 показано, как сопроцессоры мозга могут быть использованы для оптимизации человеческого общения и совместной работы, облегчая прямое взаимодействие между одним ГМ и другим.
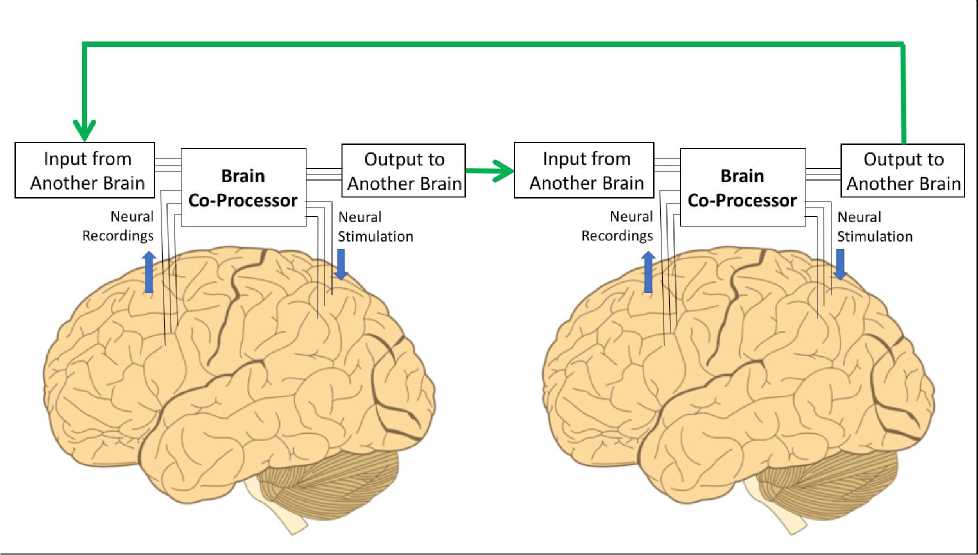
Рис. 7. Мозговые сопроцессоры для прямого взаимодействия мозга с мозгом
Каждый человек использует сопроцессор для отправки информации одному или нескольким ГМ и получая информацию от этих ГМ. Сопроцессор оптимизирован для интерпретации и кодирования сигналов из одного ГМ для декодирования в другой. Первые подобные взаимодействия типа «мозг-мозг» были продемонстрированы в [26–28] с использованием неинвазивных технологий регистрации и стимуляции. ЭЭГ использовалось для декодирования двигательной или зрительной коры ГМ «отправителя», а расшифрованная команда доставлялась через транскраниальную магнитную стимуляцию (далее – ТМС) к моторной или зрительной коре «приёмника». Исследования показали, что такие задачи как видеоигры или «20 вопросов» могут быть успешно выполнены посредством прямого взаимодействия одного ГМ с другим [29, 30].
Примечание . Как и большинство новых технологий, существует значительный риск злоупотребления сопроцессорами мозга. Беспроводная связь от или к мозгу может быть перехвачена («прослушивание мозга») и использована преступниками, террористами, коммерческими предприятиями или шпионскими агентствами, а также юридическими, правоохранительными и военными структурами. Стимуляция мозга открывает опасную возможность того, что незащищенное устройство может быть взломано и использовано для принуждения человека к совершению нежелательных действий (например, совершить преступление или подписать документ, например, завещание). Устройство с доступом к областям мозга, связанным с памятью, потенциально может быть взломано для выборочного стирания воспоминания [31] или записывать ложные воспоминания («промывание мозгов»). Вредоносные объекты могут отправить «вирус» на устройство, что приведет к когнитивным нарушениям или когнитивным манипуляциям. Учитывая возможность беспрецедентных злоупотреблений и злонамеренных атак, крайне важно обеспечить надежные правовые и технологические гарантии до широкого развертывания любого сопроцессора. Действия, которые нарушают безопасность и конфиденциальность сопроцессора, должны быть признаны незаконными, со строгими наказаниями за нарушение закона. Методы шифрования и методы безопасности должны иметь гораздо более сильной гарантией от атак, чем существующие методы.
Учитывая возможности злоупотреблений, законодателям потребуется принять достаточно детализированное законодательство, чтобы регулировать, какие типы сопроцессоров разрешено использовать, а какие нет — это может варьироваться от страны к стране, подобно тому, как сегодня действуют законы, регулирующие контролируемые вещества. разные в разных странах. Кроме того, возможно, потребуется изменить законы об ответственности – суды должны будут решить, кто несет ответственность за несчастные случаи или незаконные действия, совершенные с использованием сопроцессора. Поскольку сопроцессоры используют ИИ для адаптации и обучения, может быть неясно, был ли нарушен закон из-за волевой команды, отданной пользователем-человеком, или из-за действия ИИ. Одно из возможных решений – полностью возложить ответственность на пользователей, попросив их подписать отказ от прав перед использованием сопроцессора, что освобождает компанию, занимающуюся сопроцессором, от ответственности, за исключением производственных дефектов. В качестве альтернативы суды могут поддерживать группы экспертов по ИИ, которым поручено расследовать, виновата ли компания в поведении алгоритма ИИ компании.
Использование сопроцессоров как неотъемлемой части человеческого мозга может коренным образом изменить определение того, что значит быть человеком.
Разработка социальных роботов в целом определяет возрастающий интерес к исследованиям их применения в социальной среде. Однако, полноценное достижение взаимодействия человека и робота по-прежнему сталкивается с серьезными проблемами эмоциональной совместимости во взаимодействии [32–35].
В настоящее время общепризнан факт лучшей реакции людей на роботов, проявляющих сочувствие, что предполагает способность распознавать эмоции и реагировать соответственно [36–42]. Ярким примером промышленного применения в сфере обслуживания является открытие отеля Henn - na в Нагасаки в 2015 году – первый в мире отель с роботизированным персоналом [43]. К началу 2019 года в отеле насчитывалось в общей сложности 243 робота (к моменту открытия их было 80). Однако около 120 из них пришлось уволить из-за низкой эффективности.
Для естественного взаимодействия между человеком и роботом необходимо применять мультимодальный подход для возможности отображения роботом широкого эмоционального спектра: выражения лица, речи, жестов. Немаловажным является понимание контекста разговора и адаптация поведения. Этого можно достичь, подключив социальных роботов к Интернету вещей ( IoT ) и облачным сервисам, для повышения их социальных и эмоциональных возможностей [44–46] при одновременном повышении безопасности [47].
Однако выразительное поведение лиц роботов также требует сложной мехатронной конструкции и управления [48]. Уместная реакция и контроль выражения лица, несмотря на множество успешных применений, остается проблемой, ограничивающей их широкое распространение. Это послужило поводом для проведения значительного количества исследований, направленных на снижение стоимости и упрощение использования (например, [49–52]).
Также, важно изучить влияние взаимодействия с роботами на физиологические реакции человека через использование методов ЭЭГ или фМРТ. В работе Ванга [52] взаимодействие человека с роботом сравнивалось с взаимодействием человека с человеком посредством детального анализа фМРТ. Было выявлено, что взаимодействие человека с роботом вызывает сильное чувство отторжения и страха, относительно эмоций от взаимодействия человека с человеком, хотя данные эксперименты ограничивались лишь цветными изображениями на экране монитора.
Оптимальный баланс взаимодействия человека и робота может быть достигнут в компромиссе между человекоподобным внешним видом робота и классическим. В [53] показана разработка роботов с гибридным лицом, которые выражали спектр эмоций с помощью лицевой панели. Обнаружено, что реакция людей на бездействующих роботов дает такой же эмоциональный отклик, как и на человеческие лица [54].
Эмоциональное обучение мозга и процессорные модели контроллеров на ИТ когнитивных вычислений
Более ранние исследования разработки методов, основанных на биологических данных, связаны с разработкой ИНС, имитирующей нервную систему млекопитающих [55, 56]. Нейронные сети и нейро-нечеткие методы обладают высокой способностью обобщения моделирования нелинейного и хаотического поведения сложных систем [55, 56], а также широко применяются в таких областях как экономика, здравоохранение, связь, прогнозирование погоды и др. [57, 58]. Достаточно известная модель,
Сетевое научное издание «Системный анализ в науке и образовании» Выпуск № 4, 2020 год разработанная по подобию процесса принятия решений человеком – нейро-нечеткий метод, сочетающий в себе адаптивную ИНС и системы нечеткого вывода [57].
Условный страх — это общий механизм для человека и животного, который помогает адаптироваться и предотвращать опасные для жизни ситуации. Нейронная структура рефлекса условного страха была предложена Леду на основе лабораторных экспериментов на мышах. Леду представил структуру нейронов, подчеркнув роль миндалины в момент страха [59]. Другой, активно участвующей в данном процессе частью ГМ, является орбитофронтальная кора, играющая основную роль в распознавании опасной ситуации, и, в частности, в предвосхищении реакции страха. Миндалевидно-орбитофронтальная система представляет собой вычислительную модель эмоционального обучения и состоит из четырех частей: сенсорной коры, таламуса, миндалины и орбитофронтальной [60]. Все части копируют соответствующие части мозга, отвечающие за собственное эмоциональное обучение. Предлагаемая модель, основанная на биологических данных, называется моделью, вдохновленной эмоциональным обучением мозга (англ. Brain Emotional Learning-Inspired Model , далее – BELIM ). Входные данные и взаимодействие каждой из частей системы сымитированы на подобии взаимодействия соответствующих частей нейронной структуры условного страха. Основная функция BELIM может быть реализована путем объединения функций адаптивных сетей соответствующим образом.
Существуют различные типы BELIM , например, система нечеткого вывода для эмоционального обучения мозга (англ. Brain Emotional Learning Fuzzy Inference System , далее – BELFIS ), использующая адаптивные сети с прямой связью, система рекуррентного нечеткого вывода для эмоционального обучения мозга (англ. Brain Emotional Learning-based Recurrent Fuzzy System , далее – BELRFS ), объединяющая сети прямой связи и рекуррентные адаптивные сети. Структура BELFIS соответствует общей структуре BELIM , однако функциональные возможности реализованы с использованием адаптивных сетей с системой нечеткого вывода. Для оценки производительности BELFIS, была рассмотрена задача изучения солнечной активности на основе числа солнечных пятен – эталонного показателя солнечной активности. Солнечная активность, как хаотическая природная система, измеряется с помощью солнечных пятен, солнечных вспышек и корональных выбросов массы [60]. Показателем активности в течение солнечного цикла является число солнечных пятен, которое постепенно увеличивается до максимального значения, известного как солнечный максимум, от последнего наименьшего числа, которое обозначается как солнечный минимум.
Результаты тестирования BELFIS на различных наборах данных сравнивались с помощью таких методов как многослойный персептрон (далее – МП) и нейро-нечеткие методы ( ANFIS и LoLiMoT ). Результаты показывают, что BELFIS способен получать результаты, сопоставимые с результатами ANFIS в задаче краткосрочного и долгосрочного прогнозирования солнечной активности. Стоит отметить, что время работы BELFIS было меньше, чем ANFIS .
В последнее время биологически мотивированные когнитивные интеллектуальные вычисления успешно применяются для решения различных типов задач [62–66]. Одним из основных отличий интеллектуальной системы от традиционной является способность к обучению. Общим атрибутом процесса обучения является адаптация параметров системы для рационального реагирования на изменяющуюся среду. Механизм оценки реакции необходим для того, чтобы применяемый алгоритм обучения оценивал рабочее состояние системы. Один из типов оценки основан на эмоциональных сигналах, которые оценивают влияние внешних раздражителей на способность системы как эффективно функционировать в краткосрочной перспективе, так и поддерживать долгосрочные перспективы выживания.
В системах управления и принятия решений в режиме реального времени эмоциональное обучение мозга является более предпочтительной методологией, по сравнению с методами на основе градиента и эволюционных алгоритмов, из-за своей низкой вычислительной сложности и быстрого обучения. В мозге млекопитающих, например, этот процесс обучения происходит в лимбической системе мозга [68].
Примечание. В 1992 году Ле Ду обнаружил связь, возникающую в миндалине, как ответ на стимул и его эмоциональные последствия. Миндалина участвует в эмоциональной регуляции возбуждения, в то время как префронтальная кора контролирует реакцию на изменения в эмоциональных чрезвычайных ситуациях. Поэтому для описания эмоционального обучения мозга была создана математическая модель – контроллер эмоционального обучения мозга (BELC) [69]. Основная структура этой модели разделена на две части. Одна – это сенсорная нейронная сеть, которая приблизительно соответствует миндалине, другая – эмоциональная нейронная сеть, которая приблизительно соответствует орбитальной префронтальной коре. Самообучающиеся и регулирующие параметры являются основными функциями сенсорной нейронной сети, а функции реагирования на внешние факторы и установления сенсорно-эмоциональной корреляции принадлежат эмоциональной нейронной сети, которая оказывает косвенное влияние на сенсорную нейронную сеть. Более того, они влияют и друг на друга. Важно отметить, что условные рефлексы, возникающие в миндалине, отличаются от хорошо известных в мозжечке. Условный рефлекс в миндалине устанавливает эмоциональные связи, тогда как мозжечок участвует в обучающих стимулах.
Проектирование интеллектуальных систем, основанных на эмоциональных сигналах, строится с применением методов управления на основе искусственных нейронных сетей, нечеткого управления и генетических алгоритмов. На основе смоделированной математический модели млекопитающих BEL была разработана архитектура микропроцессорного контроллера под названием «Интеллектуальный регулятор на основе эмоционального обучения мозга» (англ. BELBIC – Brain Emotional Learning Based Intelligent Controller ) – нейробиологически мотивированный интеллектуальный регулятор, основанный на вычислительной модели эмоционального обучения в лимбической системе млекопитающих. Возможности обучения, многоцелевые свойства и низкая вычислительная сложность BELBIC делают его очень перспективным инструментом для применения в приложениях реального времени.
Описание лимбической системы
Лимбическая система, как часть мозга существ типа млекопитающих, в основном отвечает за эмоциональные процессы. Она в основном состоит из следующих компонентов: миндалины, орбитофронтальной коры, таламуса, сенсорной коры, гипоталамуса, гиппокампа и других областей. Также, существуют компоненты, играющие важную роль в лимбической системе, например базальные ганглии, глобус паллидус, черная субстанция, субталамическое ядро и периамигдалоидная кора.
Рисунок 8A иллюстрирует анатомию основных компонентов лимбической системы [70].
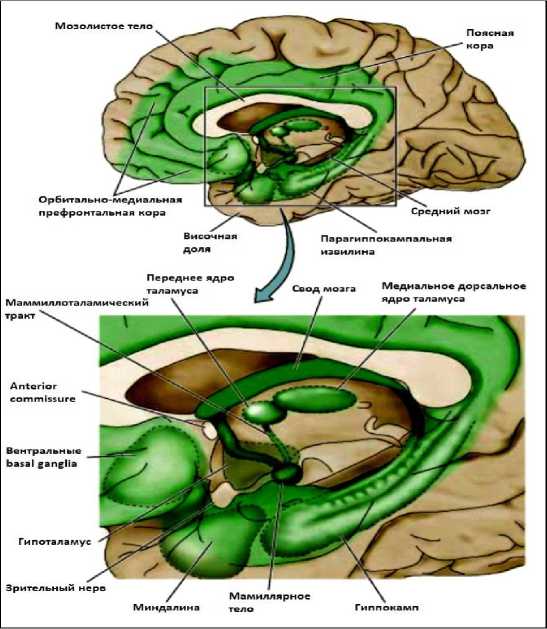
Рис. 8A. Основные структуры мозга, связанные с лимбической системой
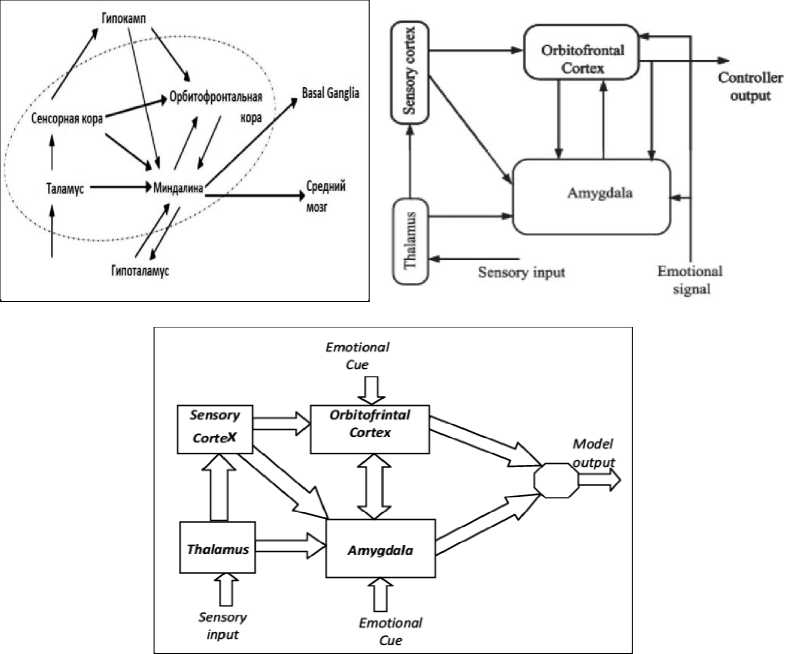
Рис. 8B. Связи миндалины с другими компонентами лимбической системы
Первый признак эмоционального состояния системы появляется в миндалине, имеющую небольшую миндалевидную форму в субкортикальной области. Этот компонент размещен таким образом, чтобы взаимодействовать со всеми другими сенсорными кортикальными слоями и областями внутри лимбической системы. Соединения миндалины с другими компонентами показаны на рис. 7B.
Исследования показывают, что раздражитель и эмоциональные реакции на него активизируются в области миндалины. В этом участке ГМ хорошо проанализированные раздражители в сенсорной коре, а также слабо классифицированные стимулы в таламусе, ассоциируются с эмоциональной ценностью.
Еще одним компонентом в этой области является таламус, который находится рядом с базальными ганглиями. Это неоднородная субкортикальная структура и промежуточная область между кортикальными структурами и субкортикальными.
Кроме того, различные части таламуса также передают большую часть сенсорной информации от периферических сенсорных систем к сенсорной коре. В частности, считается, что таламические сенсорные входы, идущие в миндалевидное тело, опосредуют изначально эмоционально заряженные стимулы, а также слабо классифицированные стимулы в целом [71]. Сигнал таламуса, идущий в миндалевидное тело, избегает процессы, связанные с сенсорной корой и другими компонентами системы. Поэтому миндалевидное тело получает от таламуса неоптимальный, но быстрый стимул, который среди входных стимулов часто называют характерным сигналом [72].
Следующий компонент – это сенсорная кора, близкая к таламусу, которая получает свой вход от последнего. Фактически, сенсорная кора обрабатывает информацию из сенсорных областей. Сенсорная кора посылает хорошо проанализированный сигнал в миндалевидное тело и орбитофронтальную кору. Как правило, млекопитающие используют эти области своей лимбической системы для более качественной обработки восприятия.
Ниже таламуса находится еще один компонент, называемый гипоталамусом, который, отвечает за регуляцию эндокринной системы, автономной нервной системы и первичных поведенческих выживающих состояний [73]. Латеральная область гипоталамуса связана с различными областями миндалевидного тела и наоборот. Считается, что эти связи играют важную роль в мотивационном контроле структур внутри гипоталамуса [74].
Кроме того, одним из наиболее сложных и извилистых компонентов лимбической системы является гиппокамп, расположенный в той же области, что и миндалина. Его главная роль – картирование окружающей среды на основе экологического сигнала. Гиппокамп имеет и другие функции, такие как пространственная навигация, создание долговременной памяти и формирование контекстных представлений.
Рассмотрим структуру интеллектуального регулятора на основе эмоционального обучения мозга ( BELBIC ) [75] и его особенности в задачах управлений сложными слабоструктурированными системами.
Интеллектуальный регулятор на основе эмоционального обучения мозга и технологий когнитивных вычислений
В биологической системе эмоциональные реакции оператора-человека используются для быстрого принятия решений в сложных условиях или в чрезвычайных ситуациях. Считается, что миндалина и орбитофронтальная кора являются наиболее важными частями мозга, участвующими в эмоциональных реакциях и обучении системы. Миндалина представляет собой небольшую структуру в средней височной доле головного мозга, которая отвечает за эмоциональную оценку стимулов. Миндалина и орбитофронтальная кора вычисляют свои результаты на основе эмоционального сигнала (усиливающего сигнала), полученного из окружающей среды. Конечный результат (эмоциональные реакции) рассчитываются путем вычитания выходного сигнала миндалины из выходного сигнала орбитофронтальной коры. (см. рис. 9).
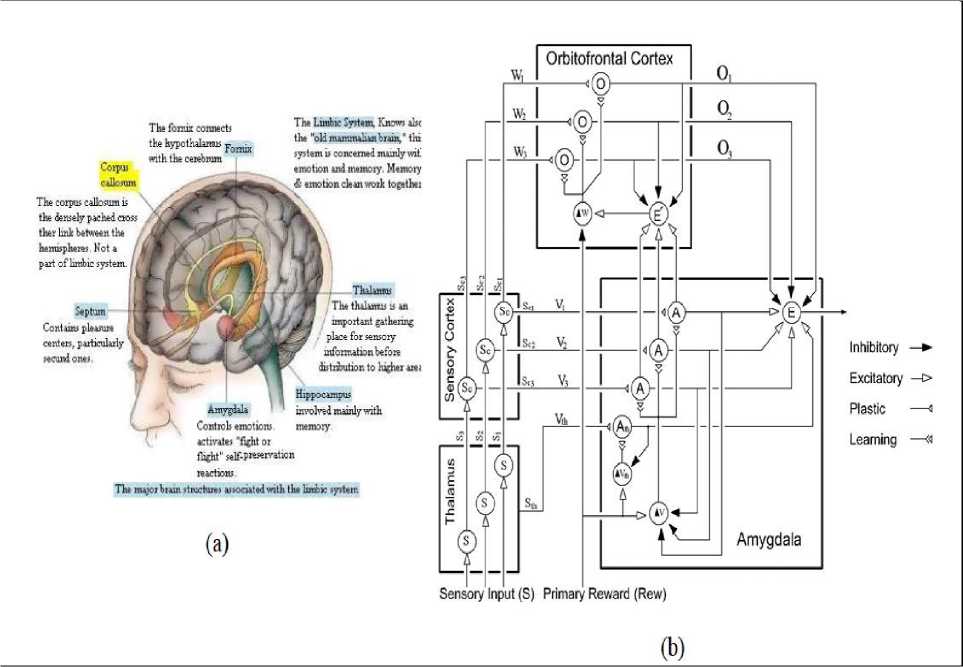
Рис. 9. Графическое изображение процесса эмоционального обучения мозга
Вектор S показывает входы стимулов в систему. Существует один узел A для каждого стимула S . Ah - еще один вход в часть миндалины, которая является максимумом входов стимулов ( S ):
A h = max( S i ) • (3)
Для каждого узла A имеется пластичная связь соединения V . Выход каждого узла образуется путем умножения любого ввода на вес V ; Vi регулируется пропорционально разнице между активацией узлов A и усилением сигнала Rew . Термин «а» — это константа, используемая для регулировки скорости обучения:
A i = S i • V i (4)
А V = а(S,. max(0, Re w - ^ A )) . (5)
Веса V не могут уменьшаться. Это является веской причиной для построения подобной архитектуры, поскольку, как только на основе эмоциональной реакции получен обучающий сигнал, он должен быть постоянным и не может быть потерян.
Задача орбифронтальной коры состоит в том, чтобы подавить эту реакцию, когда она неуместна. Правило обучения орбифронтальной коры очень похоже на правило обучения миндалевидного тела, но вес орбифронтальной связи может как увеличиваться, так и уменьшаться. О -узлы ведут себя аналогично, причем вес W соединения используется для входного сигнала для создания выходного сигнала:
O . = S i • w . , (6)
в - еще одна константа скорости обучения. А W рассчитывается как:
А W i = в ( S i ( E ' - Re w )) (7)
Е -узел просто суммирует выходные данные из А -узлов и затем вычитает запрещающие выходы из О -узлов. Результатом является выход из модели. Узлы A выдают выходные данные пропорционально их вкладу в предсказание вознаграждения Rew , тогда как узлы O блокируют выходные данные E по мере необходимости:
E = ^ A - ^ Oz включая A h . (8)
ii
Узел E ' представляет собой суммы выходов от A , за исключением Ath , а затем вычитает из запрещающих выходов от узлов O :
E ' = ^ A - ^ O , не включая A h . (9)
ii
В результате два набора входных данных (сенсорные входы и эмоциональные или усиливающие сигналы) преобразуются в сигнал решения (эмоциональные реакции). Конфигурации с замкнутым контуром, использующие интеллектуальный регулятор на основе эмоционального обучения мозга в контуре прямой связи всей системы, реализованы так, что входные сигналы имеют правильные (физически и логически непротиворечивые) интерпретации. Блок неявно реализует алгоритм обучения и механизм выбора действий, используемые в функциональных реализациях эмоционально-ориентированных контроллеров.
Таким образом, имеем гибридное (двухконтурное) интеллектуальное управление с применением когнитивных вычислений с аппаратной реализацией в виде встраиваемых интеллектуальных когнитивных контроллеров.
Сравнение с ПИД-регулятором
В системах управления и принятия решений в режиме реального времени эмоциональное обучение мозга является мощной методологией благодаря своей простоте, низкой вычислительной сложности и быстрому обучению, где методы на основе градиента и эволюционные алгоритмы трудно применять из-за их высокой вычислительной сложности [76–81].
В последнее время предлагается много инженерных систем с применением BELBIC (см. рис. 10).
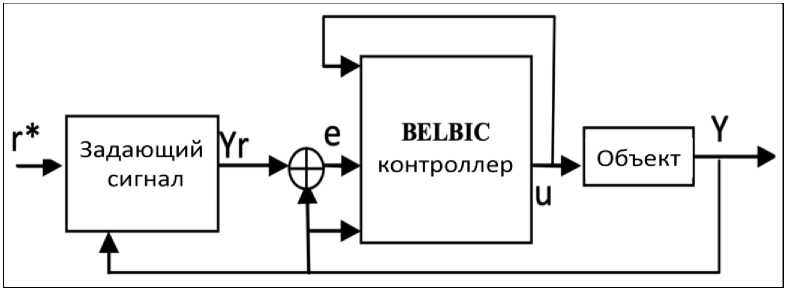
Рис. 10. Система управления на основе BELBIC
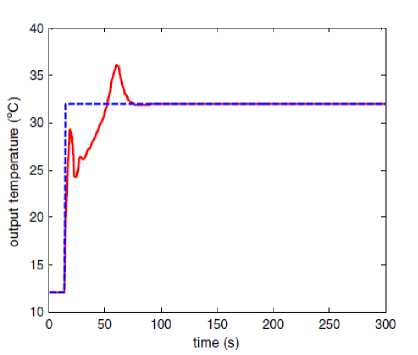
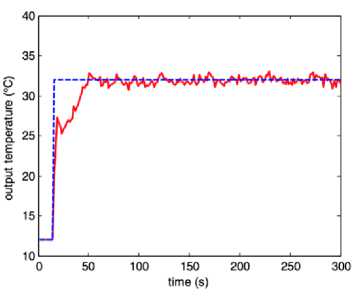
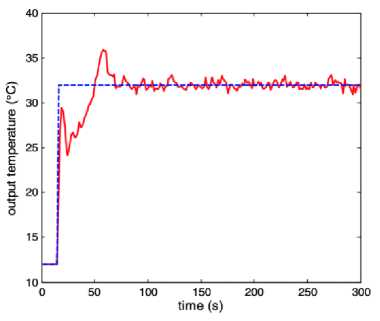
В [82] применяется интеллектуальный контроллер для управления динамикой электрообогревае-мой микротеплообменной установки. Для построения нейро-нечеткой модели был применен локальнолинейный алгоритм обучения, называемый локально-линейным деревом мод ( LoLiMoT ). Реакция замкнутой системы с использованием BELBIC показана на рис. 11а. Для исследования производительности BELBIC было выполнено другое моделирование с использованием обычного ПИД-регулятора. Методом проб и ошибок, были вычислены лучшие значения коэффициентов для ПИД-регулятора, при которых замкнутая система стабильна и имеет удовлетворительные рабочие характеристики. Реакция системы с обратной связью с использованием ПИД-регулятора показана на рис. 11б.
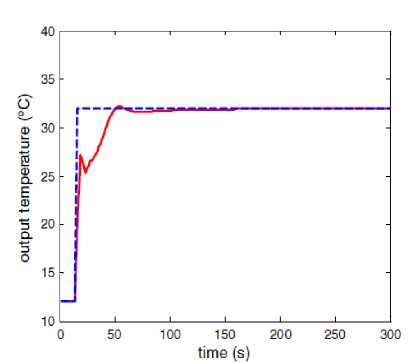
а) Реакция системы с обратной связью с использованием BELBIC-регулятор
б) Реакция системы с обратной связью с использованием ПИД-регулятора
Рис. 11. Сравнение реакций системы с применением BELBIC и ПИД-регуляторов
Сравнивая рис. 11а и 11б, можно увидеть, что производительность системы с использованием BELBIC намного эффективнее системы, использующей ПИД-регулятор.
Реакция системы с BELBIC -регулятором в разы быстрее, с меньшим количеством отклонений (перерегулированием) и с минимальной фазой. Регулятор BELBIC вырабатывает меньшее по силе воздействия управляющее воздействие, по сравнению с ПИД-регулятором, количество недоработок и превышений в отклике (реакции) объекта управления сведено к минимуму (см. рис. 12а и 12б).
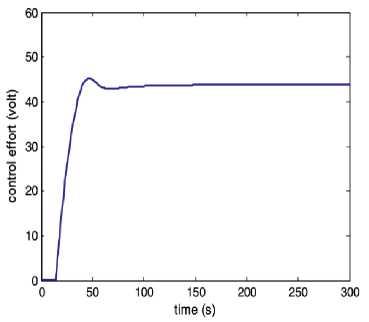
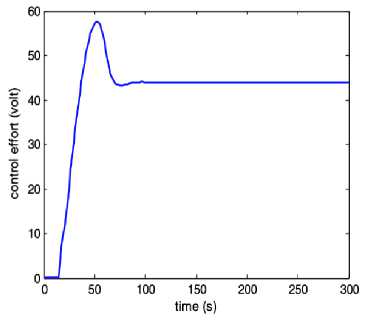
б) Управляющий сигнал ПИД-регулятора
а) Управляющий сигнал BELBIC-регулятора
Рис. 12. Управляющий сигнал BELBIC и ПИД-регуляторов
Кроме того, использование сигнала ПИД-регулятора в качестве сенсорного входа, который может быть усилен или ослаблен с помощью BELBIC -регулятора, имеет ряд преимуществ ПИД-регулятора, например надежность и эффективность. Как показано на рис. 13, во время воздействия на систему дополнительным шумом в виде изменения входной температуры, производительность BELBIC -регулятора все же намного лучше, чем ПИД-регулятора.
-
а) Замкнутая система с шумами на основе BELBIC-регулятора
-
б) Замкнутая система с шумами на основе ПИД-регулятора
Рис. 13. Сравнение реакций системы с шумами с применением BELBIC и ПИД-регуляторов
Следовательно, можно утверждать, что BELBIC-регулятор обладает достаточной устойчивостью (робастностью) к шумам и непредвиденным ситуациям управления [83]. Другими словами, BELBIC-регулятор, использующий ПИД-регулятор в качестве сенсорного ввода, может сохранить многие преимущества традиционного ПИД-регулятора. Кроме того, такая же архитектура может быть использована в других приложениях, где ПИД-регулятор заменен другими системами управления.
В [84] BELBIC используется для управления скоростью электрогидравлической сервосистемы ( EHSS ) в условиях существенных нелинейностей движений, внутреннего трения и различного шума. Электрогидравлические сервосистемы широко используются во многих видах промышленности благодаря их способности быстро реагировать на большие крутящие нагрузки. Например, типичные области применения включают системы активной подвески автономных средств передвижения и амортизаторов, управления промышленными роботами, спутниками, симуляторами полета, управлением турбинами и мн. др.
Структура системы управления показана на рис. 14.
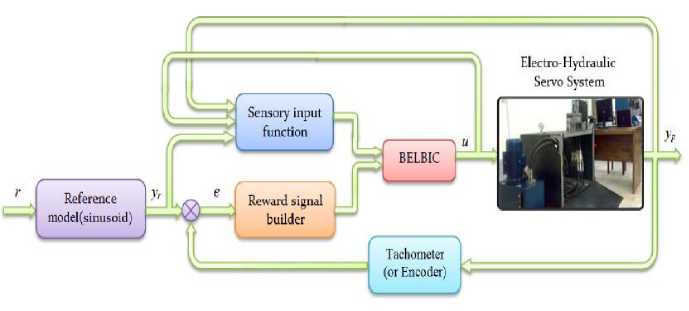
Рис. 14. Конфигурация системы с использованием интеллектуального регулятора на основе эмоционального обучения мозга
Система на основе BELBIC -регулятора быстро обучается динамике системы без каких-либо дополнительных тренировок. В переходных состояниях в сигнале управления BELBIC наблюдается небольшие промахи, поскольку сервопривод потребляет больше тока; однако в ПИД-регуляторе такое поведение не реализовано вовсе. Когда BELBIC -регулятор переходит в устойчивое состояние, управляющий сигнал становится однородным и плавным, что является важным преимуществом при практическом использовании, особенно в системах большой мощности, таких как электрогидравлические системы.
Работа электрогидравлической системы на основе BELBIC -регулятора сравнивалась с регулятором линеаризации обратной связи, обратного шага и ПИД-регулятором.
На рис. 15 показано сравнение регуляторов без внешних шумов.
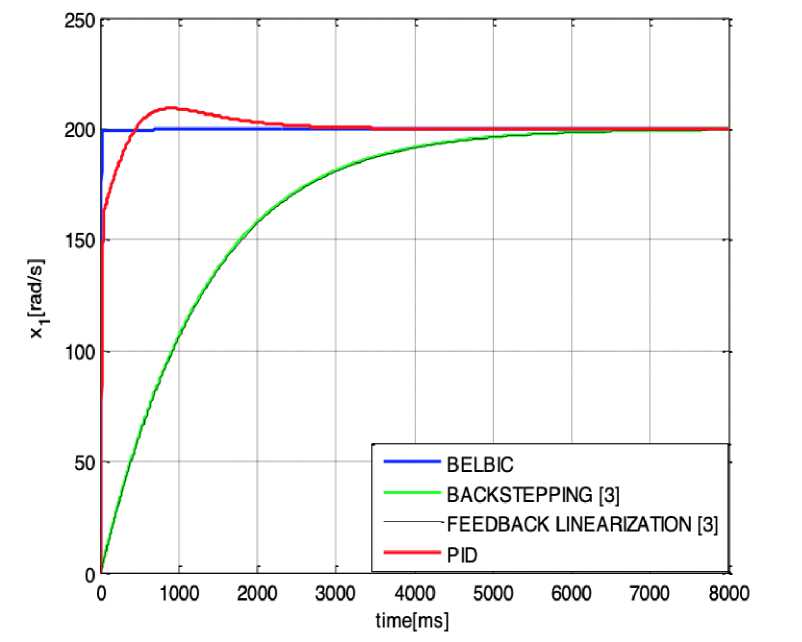
Рис. 15. Сравнение регуляторов без внешних шумов
Результаты показывают, что BELBIC -регулятор обеспечивает угловую скорость гидромотора до желаемой скорости намного быстрее, чем контроллеры линеаризации с обратной связью, обратного шага и ПИД, и имеет более короткое время установления переходных процессов, чем другие контроллеры. Потребление энергии BELBIC примерно такое же, как у ПИД-регулятора, в то время как у BELBIC наблюдается меньше ошибок отслеживания. BELBIC отслеживает опорный сигнал с очень низкой ошибкой по сравнению с ПИД-регулятором, демонстрирует хорошую инженерную устойчивость к изменениям в динамике системы, а также приемлемую точность (по сравнению с ПИД-регулятором [85]). Основное преимущество в производительности управляемой системы EHS заключается в высокой степени адаптируемости системы управления и надежности производительности по отношению к первоначальной, даже при полном отсутствии знаний о модели объекта управления.
Сравнение с нечётким регулятором
В практических системах важная информация происходит из двух источников. Одним из источников являются эксперты, которые определяют свои знания с использованием естественного языка. Другой состоит из наблюдений и исследований свойств математических моделей, полученных из физических законов.
Пример . На вход нечеткого регулятора, спроектированного для управления выходным напряжением полного мостового преобразователя постоянного тока [86] подается два сигнала: ошибка ( e ) и изменения ошибки (∆ e ). Функции принадлежности для входа этого регулятора находятся в диапазоне от (– 5 до + 5). Функции принадлежности для каждого из двух компонентов ввода ошибок и изменения ошибки показаны на рис. 16. Для входа здесь используются семь функций принадлежности: отрицательное большое ( NB ), отрицательное среднее ( NM ), отрицательное большое ( NS ), ноль ( Z ), положительное большое ( PB ), положительное среднее ( PM ) и положительный маленькое ( PS ).
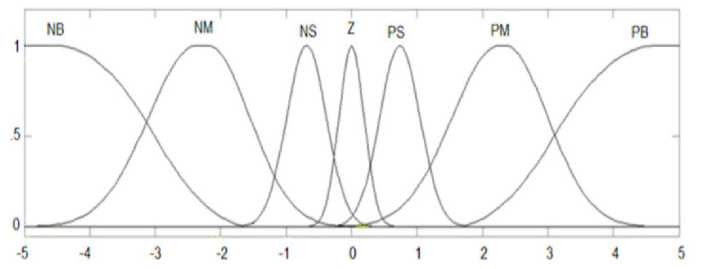
Рис. 16. Функции принадлежности для ошибки и изменения ошибки
Предполагается, что выходной сигнал контроллера равен рабочему циклу, который варьируется от 0 до 0,5. На рис. 17 показаны функции выхода контроллера.
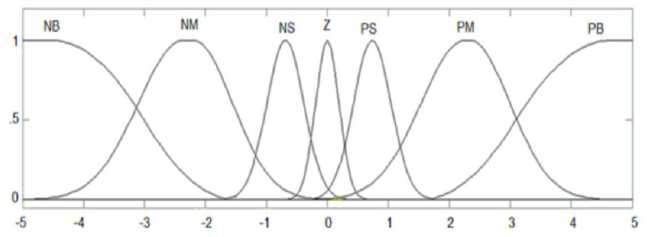
Рис. 17. Функции принадлежности выходных значений
На рис. 18 показано сравнение значений выходных напряжений системы после применения нечеткого и BELBIC -регулятора.
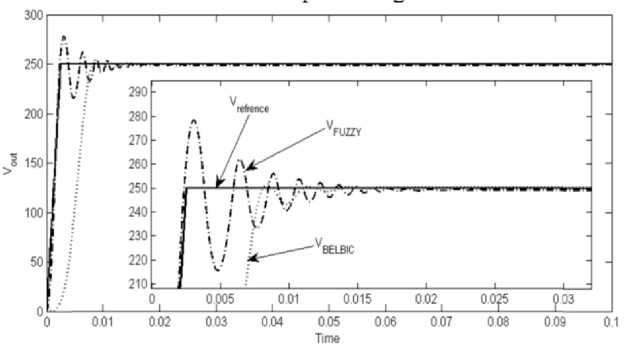
Рис. 18. Выходное напряжение системы после применения нечеткого и BELBIC-регуляторов
Рисунки 19 и 20 отражают сравнение значений, полученных c обоих типов контроллеров, при уменьшении емкости конденсатора. Как видно из этих рисунков, емкость C , которая изначально равна 330мкФ, уменьшается на 10% и 12% и достигает 297мкФ и 290мкФ соответственно.
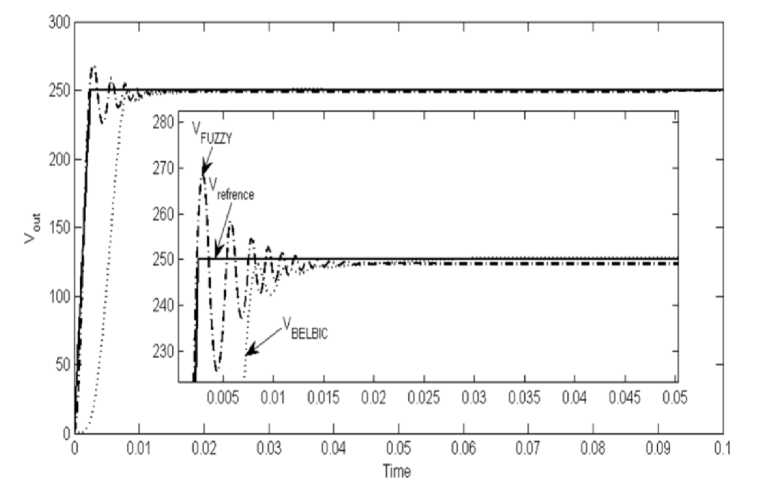
Рис. 19. Сравнение контроллера BELBIC и нечеткого контроллера с уменьшением ёмкости на 10%
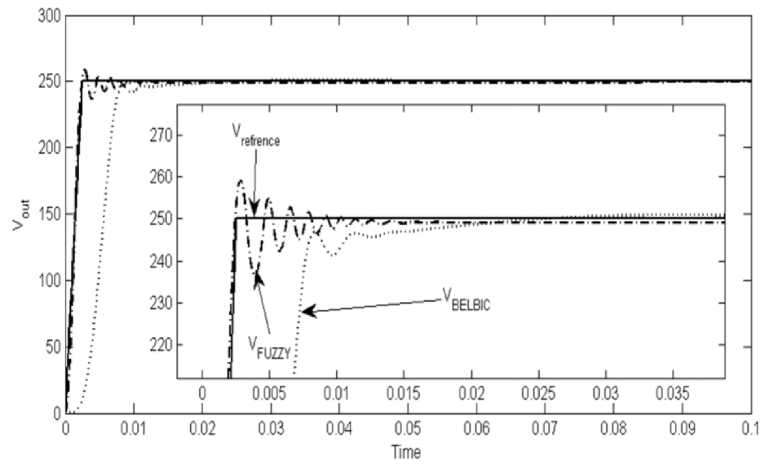
Рис. 20. Сравнение контроллера BELBIC и нечеткого контроллера с уменьшением ёмкости на 12%
Кроме того, уменьшение ёмкости конденсатора с использованием нечёткого регулятора на 10% приводит к более высокому росту диапазона колебаний переходного процесса и превышению выходного напряжения по сравнению с BELBIC -регулятором. Следовательно, BELBIC демонстрирует лучшую производительность. Когда ёмкость C уменьшается на 12%, выходное напряжение, полученное от BELBIC -регулятора, показывает более высокую задержку в достижении стабилизации по сравнению с нечётким регулятором. Кроме того, диапазон колебаний и превышение выходного напряжения объекта управления выше с применением нечёткого регулятора.
Рассмотрим сравнение значения выходных напряжений при разных показателях индуктивности. Результаты уменьшения значения индуктивности на 10% до 6,3мГн; результаты показаны на рис. 21; а уменьшения на 12% до 6,3 мГн – на рис. 22.
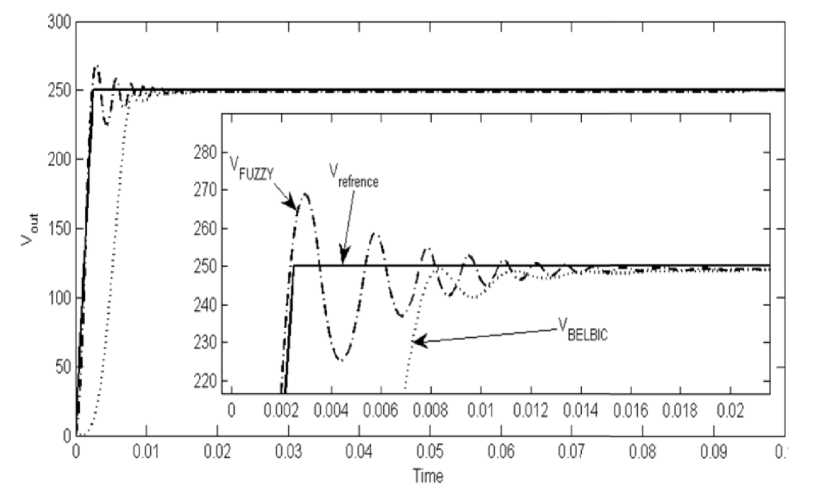
Рис. 21. Сравнение BELBIC и нечетких контроллеров с уменьшением индуктивности на 10%
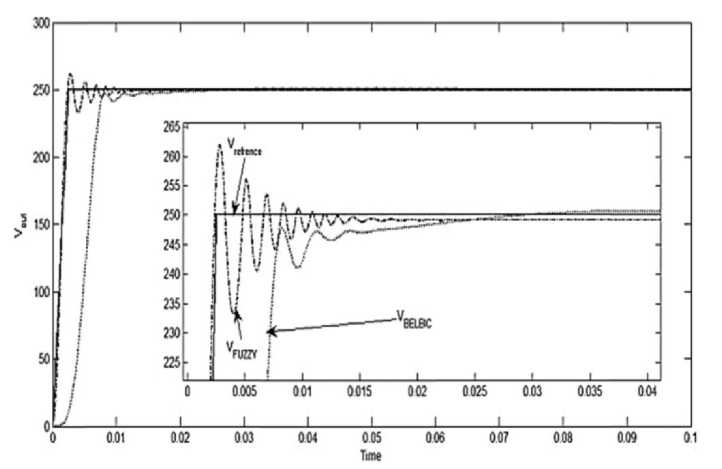
Рис. 22. Сравнение BELBIC и нечетких контроллеров с уменьшением индуктивности на 12%
Как видно на этих рисунках, при уменьшении индуктивности на 10% диапазон колебаний и превышение выходного напряжения, полученного с использованием нечеткого регулятора, превышают таковые в BELBIC . Следовательно, BELBIC показывает лучшую производительность. Когда индуктивность уменьшается на 12%, выходное напряжение, полученное с помощью BELBIC -регулятора, достигает стабилизации в течение более длительного времени. Более того, колебания и превышения выходного напряжения, полученные с помощью нечёткого регулятора, выше, чем полученные от BELBIC -регулятора.
Таким образом, производительность нечёткого и BEBLIC -регуляторов в задаче управления выходным напряжением была удовлетворительной. Поскольку эти регуляторы не предназначены для уменьшения ошибки до нуля, невозможно утверждать, что частота ошибок точно равна нулю. По сравнению с нечётким регулятором, BELBIC показывает незначительные превышения и колебания. Оба регулятора достигают стабилизации почти сразу. Поэтому можно утверждать, что BELBIC -регулятор превосходит нечёткий регулятор.
Учитывая неопределенность параметров системы (включая индуктивность, емкость, входное напряжение и допустимые изменения нагрузки), BELBIC обладает лучшими робастными характеристиками. Несмотря на то, что нечёткое управление является надежным и эффективным методом для большого числа инженерных систем, его оптимальное проектирование (и, следовательно, его производительность) существенно сильно зависят от опыта инженера.
Примеры применения BELBIC для простых роботов-манипуляторов
При сравнении с простыми регуляторами BELBIC показывает очень хорошие результаты. Он имеет два основных входа: сенсорный ввод (далее – SI ) и первичное (естественное) вознаграждение (далее – Rew ), а гибкость в настройке сенсорного ввода и первичного вознаграждения делает BELBIC оптимальным регулятором в многоцелевых задачах. Поскольку BELBIC обладает способностью к обучению, он показывает такую же реакцию, как робастные регуляторы.
Одной из важных особенностей применения BELBIC для корректного управления системой – назначение оптимального параметра как для Rew , так и для SI . Существует несколько методов настройки этих параметров: подход на основе роя частиц [87, 88], алгоритм на основе метода Ляпунова [89], нечеткая настройка [90] и метод проб и ошибок. В работе [91] для получения этих параметров рассматривается алгоритм, под названием CLONAL Selection Algorithm , применяемый к однорычажному гибкому суставному манипулятору, который представляет собой нелинейную систему для проверки корректных результатов оптимального выбора параметров. Результат работы предлагаемого регулятора сравнивается с оптимизацией роя частиц (далее – PSO ) BELBIC и робастным регулятором.
Несмотря на более медленный отклик, регуляторы CLONAL - BELBIC и PSO - BELBIC показывают небольшое перерегулирование и время настройки, в отличие от робастного регулятора. Также результат настройки CLONAL -регулятора показывает лучший результат по сравнению с PSO . Результат моделирования однорычажного гибкого суставного манипулятора демонстрирует эффективность CLONAL - BELBIC .
Примером управления тяжелыми промышленными механическими устройствами является реализация алгоритма на основе BELBIC для контроля синхронного ракетного двигателя. Синхронный реактивный двигатель (далее – СРД) привлекает большое внимание для решения многих прикладных задач из-за его простой и прочной конструкции [92, 93]. Появление метода векторного управления позволило получить быстрый отклик крутящего момента электрического привода переменного тока, как в двигателе постоянного тока [94, 95]. Алгоритм векторного управления двигателем СРД был модифицирован для достижения оптимальной работы при максимальном крутящем моменте, максимальном крутящем моменте на ток статора, высокой эффективности и коэффициенте мощности [93]. Подобная архитектура применялась с использованием обычных регуляторов в работах [93, 95]; но надежность системы оказалась крайне низкая [96, 97], из-за чего возникла необходимость использования регуляторов, действующих независимо от изменения параметров. В [98] предлагается использовать новый тип регулятора с применением искусственного интеллекта на основе медиальной модели мозга и эмоциональных процессов [99] – регулятор эмоций для привода синхронного реактивного двигателя. Рассматриваемый регулятор BELBIC успешно реализован в режиме реального времени через трехфазный СРД на базе ПК. Производительность сравнивается с оптимизированным ПИ-регулятором в различных условиях эксплуатации. Контроль достигается за счет быстрого автоматического обучения, а также надлежащего отслеживания ссылок адаптивно, и совершенно не зависит от параметров системы, что приводит к улучшению производительности. Полученные результаты показывают впечатляющие характеристики управления, в частности быструю реакцию, простую реализацию и надежность в отношении возмущений и изменений параметров. Этот эмоциональный интеллектуальный регулятор состоит из простой структуры, не требующей моделирования, с высокой способностью к самообучению, что делает его перспективным для использования в промышленных масштабах.
Универсальная аппроксимация, непрерывность и дифференцируемость – желательные свойства любой вычислительной системы, включая те, которые основаны на человеческом познания или вдохновлены природой. Работа [100] рассматривает непрерывную радиальную базисную эмоциональную нейронную сеть (англ. Continuous Radial Basis Emotional Neural Network , CRBENN ), которая извлекает пользу из свойства универсальной аппроксимации, сохраняя быстродействие эмоциональных
Сетевое научное издание «Системный анализ в науке и образовании» Выпуск № 4, 2020 год подходов. Таким образом, CRBENN решает широкий спектр сложных проблем в системной инженерии и искусственном интеллекте. Реализация CRBENN на основе прямого адаптивного устойчивого эмоционального нейроконтроля (англ. Direct Adaptive Robust Emotional Neuro - Control Approach , DARENC ) для класса неопределенных нелинейных систем. Теоретическая устойчивость алгоритмов достигается при использовании подхода Ляпунова к замкнутой системе. DARENC применяется для управления системой перевернутого маятника, а производительность такого регулятора сравнивается с нечеткими, нейронными и эмоциональными регуляторами.
При разработке регуляторов для нелинейных и сложных систем, их архитектура основывается на мощностях вычислительной среды, которая имеет хорошие аппроксимирующие свойства, непрерывность и дифференцируемость. Однако, в случае компьютерных моделей, основанных на эмоциях, модели на основе нейронных сетей и нечеткой логики не показывают удовлетворительные результаты.
Стабильные эмоциональные регуляторы часто предполагают, что эмоциональная модель обладает свойством аппроксимации обычных нейронных сетей. В [100] рассмотрена общая вычислительная модель, основанная на эмоциях, которая согласуется с основными законами эмоционального поведения мозга, но при этом поддается математической строгости и анализу. Рассматриваемая эмоциональная структура иллюстрирует математические свойства, такие как свойство аппроксимации функций, непрерывность, дифференцируемость и, прежде всего, стабильность, наряду с установленными возможностями эмоциональных моделей. Большинство современных архитектур, основанных на эмоциях, построены на простой вычислительной модели: модель BEL состоит из миндалевидного тела, которое является основной частью эмоционального обучения, орбитофронтальной коры, сенсорной коры и таламуса. CRBENN , в отличии от BEL , выполняет базовые функции в узлах таламуса, но не связывает напрямую таламуса с миндалевидным телом. Таким образом CRBENN с простыми манипуляциями эквивалентен сетям радиальных базисных функций (далее – RBF ), но с добавленными свойствами эмоциональных моделей из-за компонента миндалевидного тела и его неубывающих весов. Следовательно, его свойство универсальной аппроксимации просто доказывается на основе аналогичного свойства сетей RBF .
Эффективность функциональности отслеживания траектории перемещения мобильных роботов практически полностью снижается в условиях непредвиденных ситуаций. Работа [101] посвящена задаче отслеживания траектории неголономного мобильного робота. Самоорганизующаяся нейронная сеть была создана путем интеграции ключевых компонентов самоорганизующихся сетей. Рассматриваемая сеть была обновлена путем следования правилам эмоционального обучения мозга и теории устойчивости Ляпунова: механизм самоорганизации автоматически добавляет новые скрытые нейроны и сокращает незначительные нейроны. Использование методов теории устойчивости Ляпунова и законы обновления параметров сети гарантируют сходимость системы управления. Экспериментальные результаты продемонстрировали, что предложенный контроллер нейронной сети может лучше противостоять влиянию внешних помех, улучшая характеристики отслеживания траектории и эффективность аппроксимации нелинейных функций. В предложенном контроллере нейронной сети можно использовать передовые методы нечеткого вывода второго тип, чтобы получить лучшую способность обработки неопределенностей. Требуются дополнительные исследовательские усилия, чтобы выяснить, почему лучшие характеристики управления достигаются в среде с более сильными помехами. Кроме того, этот первоначальный отчет о предлагаемом подходе фокусируется только на моделировании управления мобильным роботом, но практические мобильные роботы более привлекательны для полного раскрытия потенциала предлагаемой сети.
Список литературы Интеллектуальный робастный регулятор на технологиях когнитивных вычислений. Ч. 1: модели когнитивного управления с эмоциональным обучением мозга
- Kondapaneni, N. Number sense as an emergent property of the manipulating brain / N. Kondapaneni, P. Perona // arXiv preprint. – 2020. – arXiv:2012.04132.
- Restle, F. Speed of adding and comparing numbers // Journal of Experimental Psychology. – 1970. – Vol. 83. – № 2. – P. 274.
- Dehaene, S. The mental representation of parity and number magnitude / S. Dehaene, S. Bossini, P. Gi-raux.// Journal of Experimental Psychology. – 1993. – Vol. 122. – № 3. – P. 371.
- Arithmetic and the brain / S. Dehaene, N. Molko, L. Cohen, A. Wilson // Current Opinion in Neurobiol-ogy. – 2004. – Vol. 14. – № 2. – Pp. 218–224.
- Number space mapping in the new born chick resembles humans’ mental number line / R. Rugani, G. Vallortigara, K. Priftis, L. Regolin // Science. – 2015. – Vol. 347. – № 6221. – Pp. 534–536.
- Rajesh, P. Rao Т. Brain Co-Processors: Using AI to restore and augment brain function // arXiv preprint. – 2020. – https://arxiv.org/abs/2012.03378.
- Task-specific somatosensory feedback via cortical stimulation in humans / J. Cronin, J. Wu, K. Collins, D. Sarma, R. Rao, J. Ojemann, J. Olson. // IEEE Trans Haptics. – 2016. – Vol. 9. – № 4. – Pp. 515–522.
- Direct stimulation of somatosensory cortex results in slower reaction times compared to peripheral touch in humans / D. Caldwell, J. Cronin, J. Wu, K. Weaver, A. Ko, R. Rao, J Ojemann // Nature Sci Rep. – 2019. – Vol. 9. – № 1. – P. 3292.
- Kalman, R. A. New Approach to Linear Filtering and Prediction Problems // Journal of Basic Engineering. – 1960. – Vol. 82. – Pp. 35–45.
- Bryson, A. Applied Optimal Control / A. Bryson, Y. Ho // Halsted Press, 1995.
- Electrical stimulus artifact cancellation and neural spike detection on large multi-electrode arrays / G. Mena, L. Grosberg, S. Madugula, P. Hottowy, A. Litke, J. Cunningham, E. Chichilnisky, L. Paninski. // PLoS Comput Biol. – 2017. – Vol. 13. – № 11.
- O'shea, D. ERAASR: an algorithm for removing electrical stimulation artifacts from multielectrode array recordings / D. O'shea, K. Shenoy. // J Neural Eng. – 2018. – Vol. 15. – № 2.
- Zhou, A. Toward true closed-loop neuromodulation: artifact- free recording during stimulation / A. Zhou, B. Johnson, R. Muller.// Curr Opin Neurobiol. – 2018. – Vol. 50. – Pp. 119–127.
- Signal recovery from stimulation artifacts in intracranial recordings with dictionary learning / D. Cald-well, J. Cronin, R. Rao, K. Collins, K. Weaver, A. Ko, J. Ojemann, J. Kutz, B. Brunton // J Neural Eng, 2020. – Vol. 17. – № 2.
- Delgado, J. Physical Control of the Mind: Toward a Psychocivilized Society // Harper and Row, 1969.
- Cortical Brain-Computer Interface for Closed-Loop Deep Brain Stimulation / J. Herron, M. Thompson, T. Brown, H. Ojemann, A. Ko. // IEEE Trans Neural Syst Rehabil Eng. – 2017. – Vol. 25. – № 11. – Pp. 2180–2187.
- Jackson, A. Long-term motor cortex plasticity induced by an electronic neural implant / A. Jackson, J. Mavoori, E. Fetz. // Nature. – 2006. – Vol. 444. – № 7115. – Pp. 56–60.
- Restoration of function after brain damage using a neural prosthesis / D. Guggenmos, M. Azin, S. Barbay, J. Mahnken, C. Dunham, P. Mohseni, R. Nudo. // Proc Natl Acad Sci U S A. – 2013. – Vol. 110. – № 52. – Pp. 77–82.
- High performance communication by people with paralysis using an intracortical brain-computer inter-face / C. Pandarinath, P. Nuyujukian, C. Blabe, B. Sorice, J. Saab, F. Willett, L. Hochberg, K. Shenoy, J. Henderson. // Elife. – 2017. – Vol. 21. – № 6.
- Rao, R. When two brains connect / R. Rao, A. Stocco. // Sci. Am. Mind. – 2014. – Vol. 25. – Pp. 36–39.
- Losey, D. Navigating a 2D Virtual World using Direct Brain Stimulation / D. Losey, A. Stocco, J. Aber-nethy, R. Rao. // Frontiers in Robotics and AI, 2016.
- Farwell, L. The truth will out: interrogative polygraphy ('lie detection') with event-related brain potentials / L. Farwell, E. Donchin // Psychophysiology. – 1991. – Vol. 28. – № 5. – Pp. 31–47.
- Kozel, F. Detecting deception using functional magnetic resonance imaging / F. Kozel, K. Johnson, Q. Mu // Biol Psychiatry. – 2005. – Vol. 58. – № 6. – Pp. 5–13.
- Goering, S. On the Necessity of Ethical Guidelines for Novel Neurotechnologies / S. Goering, R. Yuste. // Cell. – 2016. – Vol. 167. – № 4. – Pp. 882–885.
- Yuste, R. Four ethical priorities for neurotechnologies and AI / R. Yuste, S. Goering // Nature. – 2017. – Vol. 551. – № 7679. – Pp. 159–163.
- A direct brain-to-brain interface in humans / R. Rao, A. Stocco, M. Bryan, D. Sarma, T. Youngquist, J. Wu, C. Prat // PLoS One. – 2014. – Vol. 5. – № 9. – P. 332.
- Rao, R. When two brains connect / R. Rao, A. Stocco // Sci. Am. Min. – 2014. – Vol. 25. – Pp. 36–39.
- Playing 20 Questions with the Mind: Collaborative Problem Solving by Humans Using a Brain-to-Brain Interface / A. Stocco, C. Prat, D. Losey, J. Wu, J. Abernethy, R. Rao // PLoS One . – 2015. – Vol. 10. – № 9. – P. 303.
- Conscious brain-to-brain communication in humans using non-invasive technologies / C. Grau, R. Gin-houx, A. Riera, T. Nguyen, H. Chauvat, M. Berg, J. Amengual, A. Pascualleone, G. Ruffini // PLoS One. – 2014. – Vol. 9. – № 8. – P. 205.
- Non-invasive transmission of sensorimotor information in humans using an EEG/focused ultrasound brain-to- brain interface / W. Lee, S. Kim, B. Kim, C. Lee, Y. Chung, L. Kim, S. Yoo // PLoS One. – 2017. – Vol. 12. – № 6. – P. 476.
- Rich, M. Plasticity at Thalamo-amygdala Synapses Regulates Co-caine-Cue Memory Formation and Ex-tinction / M. Rich, Y. Huang, M. Torregrossa // Cell Rep. – 2019. – Vol. 26. – № 4. – Pp. 1010–1020.
- Breazeal, C. Designing sociable robots (Intelligent robots and autonomous agents) // Cambridge, Mass.: MIT Press, 2002. – Vol. 18. – P. 263.
- Dautenhahn, K. The art of designing socially intelligent agents: Science, fiction, and the human in the loop // Applied artificial intelligence. –1998. – Vol. 12. – № 7. – Pp. 573–617.
- Pipe, G. Cooperation between Humans and Humanoid Assistive Robots // Biomimetics: Nature-Based Innovation, 2012.
- Breazeal, C. Robots that imitate humans / C. Breazeal, B. Scassellati // Trends in cognitive sciences. – 2002. – Vol. 6. – № 11. – Pp. 481–487.
- Leite, I. Social Robots for Long-Term Interaction: A Survey / I. Leite, C. Martinho, A. Paiva // Interna-tional Journal of Social Robotics. – 2013. – Vol. 5. – № 2. – Pp. 291–308.
- Kuwamura K. Can We Talk through a Robot As if Face-to-Face? Long-Term Fieldwork Using Teleoperated Robot for Seniors with Alzheimer's Disease / K. Kuwamura, S. Nishio, S. Sato // Front Psychol. – 2016. – Vol. 7. – P. 1066.
- Abdi, J. Scoping review on the use of socially assistive robot technology in elderly care / J. Abdi, T. Alhindawi, M. Vizcaychipi // BMJ Open. – 2018. – Vol. 8. – № 2.
- A Survey of Behavioral Models for Social Robots / L. Nocentini, G. Acerbi, A. Sorrentino, G. Mancioppi, F. Cavallo // Robotics. – 2019. – Vol. 8. – № 54.
- Chita-tegmark, M. Assistive Robots for the Social Management of Health: A Framework for Robot De-sign and Human–Robot Interaction Research / M. Chita-tegmark, M. Scheutz // International Journal of Social Robotics. – 2020 – Pp. 1–21.
- Exploiting ability for human adaptation to facilitate improved human-robot interaction and acceptance / P. Calebsolly, S. Dogramadzi, C. Huijnen, H. Heuvel // The Information Society. – 2018. – Vol. 34. – № 3. – Pp. 153–165.
- Social robots: The influence of human and robot characteristics on acceptance / L. Bishop, A. Maris, S. Dogramadzi, N. Zook // Journal of Behavioral Robotics. – 2019. – Vol. 10. – № 1. – Pp. 346–358.
- Hertzfeld, E. Japan’s Henn-na Hotel fires half its robot workforce. Hotel Management // https://www.ho-telmanagement.net/tech/japan-s-henn-na-hotel-fires-half-its-robot-workforce, 2019.
- A Systematic Review of Ten Years of Research on Human Interaction with Social Robots // International Journal of Human–Computer Interaction, 2020. – Pp. 1–14.
- P. Simoens. Internet of robotic things: Context-aware and personalized interventions of assistive social robots (short paper) / A. Lambert, N. Norouzi, G. Welch, G. Bruder // 5th IEEE International Conference on Cloud Net-working (Cloudnet). – 2016. – Vol. 5. – Pp. 204–207.
- Turcu, C. The Social Internet of Things and the RFID-based robots / C. Turcu, C. Turcu. // IV Interna-tional Congress on Ultra-Modern Telecommunications and Control Systems, 2012. – Pp. 77–83.
- A. Vulpe. IoT Security Approaches in Social Robots for Ambient Assisted Living Scenarios // 22nd Inter-national Symposium on Wireless Personal Multimedia Communications (WPMC), 2019. – Pp. 1–6.
- Multidisciplinary design approach for implementation of interactive services / I. Kuo, E. Jayawardena, B. Broadbent, A. Macdonald. // International Journal of Social Robotics. – 2011. – Vol. 3. – № 4. – Pp. 443-456.
- Breazeal, C. Robot in society: Friend or appliance / C. Breazeal, J. Velasquez // Proceedings of the 1999 Autonomous Agents Workshop on Emotion-Based Agent Architectures, 2004. – Pp. 18–26.
- Arkin, R. Affect in Human-Robot Interaction / R. Arkin, L. Moshkina // The Oxford handbook of affective computing, 2015. – Pp. 483–493.
- Menne, I. Faces of Emotion: Investigating Emotional Facial Expressions To-wards / I. Menne, F. Schwab // International Journal of Social Robots, 2017. – P. 1.
- Wang, Y. In our own image? Emotional and neural processing differences / Y. Wang, S. Quadflieg // Social Cognitive and Affective Neuroscience. – 2015. – Vol. 10. – № 11. – Pp. 1515–1524.
- Emotive Response to a Hybrid-Face Robot and Translation to Consumer Social Robots / W. Maitreyee, L. Maria, D. Bazo, R. Craig, H. Weissbart, A. Etoundi, T. Reichenbach, P. Iyenger, C. James, P. Barnaghi, C. Melhuish, R. Vaidyanathan // arXiv preprint. – 2020. – https://arxiv.org/abs/2012.04511.
- Electrophysiological studies of face perception in humans / S. Bentin, T. Allison, A. Puce, E. Perez, G. Mccarthy. // Journal of Сognitive Neuroscience. – 1996. – Vol. 8. – № 6. – Pp. 551–565.
- Nelles, O. Nonlinear System Identification: From Classical Approaches to Neural Networks and Fuzzy Models // Springer-Verlag, 2001.
- Haykin, S. Neural Networks: A Comprehensive Foundation // Upper Saddle River, NJ: Prentice Hall, 2nd ed., 1999.
- Jang, R. Neuro-Fuzzy and Soft Computing: A computational approach to Learning and Machine Intelli-gence / R. Jang, C. Sun, E. Mizutani // Upper Saddle River, NJ: Prentice Hall, 1997.
- Gomezgil, P. Experiments with a hybrid complex neural networks for long term prediction of electrocar-diograms / P. Gomezgil, M. Ramirezcortes // Proceedings of the IEEE 2006 International World Congress of Computational Intelligence, IJCNN, 2006. – Pp. 4078–4083.
- Ledoux, J. The emotional brain: the mysterious underpinnings of emotional life // Simon & Schuster, 1998.
- Moren, J. A computational model of emotional learning in the amygdala / J. Moren, C. Balkenius // From Animals to Animats, 2000.
- Izeman, A. J. Zurich sunspot relative numbers / A. Izeman, J. Wolf // The Mathematical Intelligence Journal. – 1998. – Vol. 7. – P. 27–33.
- Sipper, M. Convergence to Uniformity in A Cellular Automaton via Local Co-evolution / M. Sipper, M. Tomassini // International Journal of Modern Physics. – 1997. – Vol. 8. – № 5. – Pp. 1013–1024.
- Lucas, C. Co-evolutionary Approach to Graph-Coloring Problem / C. Lucas, D. Shahmirzadi, M. Biglar-begian // Technical Journal of Amirkabir University of Technology. – 2003. – Vol. 14. – № 54. – Pp. 363–369.
- Hofmeyr, S. Architecture for an Artificial Immune System / S. Hofmeyr, S. Forrest // Journal of Evolu-tionary Computation. – 2000. – Vol. 7. – № 1. – Pp. 45–48.
- DNA Computing Implementing Genetic Algorithms / J. Chen, E. Antipov, B. Lemieux, W. Cedeno, D. Wood // Workshop on Evolution as Computation, Piscataway, New Jersey, 1999. – Pp. 39–49.
- Fatourechi, M. Reducing Control Effort by Means of Emotional Learning / M. Fatourechi, C. Lucas, A. Khakisedigh // Proceedings of 19th Iranian Conference on Electrical Engineering, Tehran, Iran, 2001. – Vol. 41. – Pp. 1–8.
- Shahmirzadi, D. Computational Modeling of the Brain Limbic System and its Application In Control Engineering // Master dissertation, Texas A&M University, U.S.A., 2005.
- Maren, S. Long-Term Potentiation in the Amygdala: A Mechanism for Emotional Learning and Memory // Trends in Neurosciences. – 1999. – Vol. 22. – № 12. – Pp. 561–567.
- Narendra, K. Identification and control of dynamical systems using neural networks / K. Narendra, K. Parthasarathy // IEEE Trans. on Neural Networks. – 1990. – Vol. 1. – № 1. – Pp. 4–27.
- Purves, G. Neuroscience / G. Purves, D. Fitzpatrick. // Sinauer Associates, 2001.
- Ohman, A. Fears, Phobias, and Preparedness: Toward and Evolved Module of Fear and Fear Learning / A. Ohman, S. Mineka // Journal of Psychological Review. – 2001. – Vol. 108. – № 3. – Pp. 483–522.
- Kelly, J. The Neural Basis of Perception and Movement // Principles of Neural Science, London. UK: Prentice Hall, 1991.
- Schachter, S. Some Extraordinary Facts About Obese Humans and Rats // American Psychologist, 1970. – Vol. 26. – Pp. 129–144.
- Tolman, E. Introduction and Removal of Reward and Maze Performance in Rats / E. Tolman, C. Honzik // California: University of California Publications in Psychology, 1930.
- Sadeghieh, A. Implementation of an intelligent adaptive controller for an electrohydravlic servo system based on a brain mechanism of emotional learning / A. Sadeghieh, J. Roshanian, F. Najafari // Intern. J. of Advanced Robotic Systems (INTECH). – 2012. – Vol. 9. – Pp. 1–12.
- Fatourechi, M. Reducing Control Effort by means of Emotional Learning / M. Fatourechi, C. Lucas, A. Khakisedigh // Proc. of 9th Iranian Conf. on Electrical Engineering, ICEE’01, Tehran, Iran, 2001. – Vol. 41. – Pp. 1–8.
- Perlovsky, L. Emotions, Learning and control // Proc. of IEEE Int. Symp. on Intelligent Control // Intel-ligent systems and semiotics, Cambridge, MA, 1999. – Pp. 132–137.
- Ventura, R. Emotion based control systems / R. Ventura, C. Pinto-Ferreira // Proc. of IEEE Int. Symp. on Intelligent control // Intelligent Systems and Semiotics, Cambridge, MA, 1999. – Pp. 64–66.
- Inoue, K. On a Decision-Making System with Emotion / K. Inoue, K. Kawabata, H. Kobayashi // Proc. 5th IEEE International Workshop on Robot and Human Communication, 1996. – Pp. 461–465.
- Jazbi, A. Intelligent control with emotional Learning / A. Jazbi, C. Lucas // 7th Iranian Conference on Electrical Engineering, ICEE’99, Tehran, Iran, 1999. – Pp. 207–212.
- Picard, R. Healey. Toward machine emotional intelligence: Analysis of affective physiological state/ R. Picard, E. Vyzas, J. Healey // IEEE Transactions on Pattern Analysis and Machine Intelligence, 2001. – Vol. 23. – № 10. – Pp. 1175–1191.
- Brain emotional learning based intelligent controller applied to neuro-fuzzy model of micro-heat ex-changer / H. Rouhani, M. Jalili, B. Araabi, W. Eppler, C. Lucas // Expert Systems with Applications. – 2007. – Vol. 32. – Pp. 911–924.
- Lucas, C. Introducing BELBIC: Brain Emotional Learning Based Intelligent Controller / C. Lucas, D. Shahmirzadi, N. Sheikholeslami // International Journal of Intelligent Automation and Soft Computing. – 2004. – Vol. 10. – № 1. – Pp. 11–22.
- Sadeghieh, A. Implementation of an Intelligent Adaptive Controller for an Electrohydraulic Servo System Based on a Brain Mechanism of Emotional Learning / A. Sadeghieh, J. Roshanian, F. Najafi // Interna-tional Journal of Advanced Robotic Systems. – 2012. – Vol. 9. – № 1.
- Implementation of Emotional Controller (BELBIC) for Synchronous Reluctance Motor Drive Proc / E. Daryabeigi, A. Zarchi, G. Arab markadeh, M. Rahman // IEEE Intern. Electric Machines & Drivers Conf. (IEMDC), 2011. – Pp. 1066–1093.
- Ershadi, M. Comparison of Fuzzy and Brain Emotional Learning Based Intelligent Control approaches for a Full Bridge DC-DC Converter/ M. Ershadi, S. Shojaeian, R. Keramat // Intern. J. of Industrial Elec-tronics, Control and Optimization. – 2019. – Vol. 2. – № 3. – Pp. 197–206.
- Dorrah, H. PSO-BELBIC scheme for two-coupled distillation column process / H. Dorrah, A. Elgarhy, M. Elshimy // Journal of Advanced Research. – 2011. – Vol. 2. – № 1. – Pp. 73–83.
- Valizadeh, S. A particle-swarm-based approach for optimum design of BELBIC controller in AVR sys-tem / S. Valizadeh, M. Jamali, C. Lucas // International Conference on Control, Automation and Systems (ICCAS), 2008. – Vol. 26. – Pp. 79–84.
- A new Lyapunov based algorithm for tuning BELBIC for a group of linear systems / S. Jafarzadeh, M. Motlagh, M. Barkhordari, R. Mirheidari// Proc of 16th Mediterranean Conference on Control and Automation Congress Centre, 2008. – Pp. 593–595.
- Garmsiri, N. Fuzzy Tuning of Brain Emotional Learning Based Intelligent Controllers / N. Garmsiri, F. Najafi // Proceedings of the 8th World Congress on Intelligent Control and Automation, 2010. – Pp. 5296–5301.
- Jafari, M. Optimal tuning of Brain Emotional Learning Based Intelligent Controller using Clonal Selection Algorithm / M. Jafari, A. Mohammad Shahri, S. Elyas // ICCKE 2013, 2013. – Pp. 30–34.
- Lipo, T. Synchronous Reluctance Machines- A viable alternative for ac drives // Electric Ma-chines and Power Systems. – 1991. – Vol. 19. – Pp. 659–671.
- Betz, R. Control of Synchronous Reluctance Machies / R. Betz, R. Lagerquist, M. Jovanovic // IEEE Trans. On Industry Application. – 1993. – Vol. 29. – № 6. – Pp. 1110–1122.
- Doncker, R. The universal field oriented (UFO) controller in the air gap reference frame / R. Doncker, F. Profumo, A. Tenconi // Inst. Elect. Eng, 1993. – Vol. 13-D. – № 4. – Pp. 477–486.
- Vector control of a synchronous reluctance motor including saturation and iron loss / L. Xu, X. Xu, T. Lipo, W. Novotny // IEEE Trans. Ind. Applicat. – 1991. – Vol. 27. – Pp. 977–985.
- Park, J. Control of high-speed solid- rotor synchronous reluctance motor/generator for fly wheel-based uninterruptible power supplies / J. Park, C. Kalev, H. Hofmann // IEEE Trans. Ind. Electron. – 2008. – Vol. 55. – № 8. – Pp. 3038–3046.
- Lascu, C. A modified direct torque control for induction motor sensor less drive // IEEE Trans. Ind. Ap-plicat. – 2000. – Vol. 36. – Pp. 122–130.
- Implementation of emotional controller (BELBIC) for synchronous reluctance motor drive / E. Dary-abeigi, H. Abootorabizarchi, G. Arabmarkadeh, M. Rahman, C. Lucas // IEEE International Electric Ma-chines & Drives Conference (IEMDC). – 2011. – Pp. 1088–1093.
- Daryabeigi, E. Emotional controller in Electric Drives – A Review / E. Daryabeigi, G. Arab markadeh, C. Lucas // IEEE, IECON, 2010. – Pp. 2901–2907.
- Emotional neural networks with universal approximation property for stable direct adaptive nonlinear control systems / F. Baghbani, M. Akbarzadeh, M. Sistani, A. Akbarzadeh // Engineering Applications of Artificial Intelligence, 2002. – Vol. 89.
- Wu, Q. Self-Organizing Brain Emotional Learning Controller Network for Intelligent Control System of Mobile Robots // IEEE Access, –2018. – Vol. 6. – № 59. – Pp. 96–108.
- Marr, D. A theory of cerebellar cortex // The Journal of Physiology. – 1969. – Vol. 2002. – № 2. – Pp. 437–470.
- Albus, J. New Approach to Manipulator Control: The Cerebellar Model Articulation Controller (CMAC) // Journal of Dynamic Systems, Measurement, and Control. – 1975. – Vol. 97. – № 3. – P. 220.
- Albus, J. Data Storage in the Cerebellar Model Articulation Controller (CMAC) // Journal of Dynamic Systems, Measurement, and Control. – 1975. – Vol. 97. – № 3. – P. 228.
- Wang, L. Fuzzy systems are universal approximators // Proc. IEEE Int. Conf. On Fuzzy Systems, 1992. – Pp. 1163–1170.
- Medical sample classifier design using fuzzy cerebellar model neural networks / H. Li, R. Yeh, Y. Lin, L. Lin // Acta Polytechnica Hungarica. – 2004. – Vol. 13. – № 6. – Pp. 7–24.
- Lee, C. An Efficient Interval Type-2 Fuzzy CMAC for Chaos Time-Series Prediction and Synchroniza-tion / C. Lee, F. Chang, C. Lin // IEEE Transactions on Cybernetics. – 2014. – Vol. 44. – № 3. – Pp. 329–341.
- Chung, C. Fuzzy Brain Emotional Cerebellar Model Articulation Control System Design for Multi-Input Multi-Output Nonlinear / C. Chung, C. Lin // Acta Polytechnica Hungarica. – 2015. – Vol. 12. – № 4. – Pp. 39–58.
- Xu, S. Research and Application of the Pellet Grate Thickness Control System Base on Improved CMAC Neural Network Algorithm / S. Xu, Y. Jing // Journal of Residuals Science & Technology. – 2016. – Vol. 13. – № 6. – Pp. 1–9.
- Cheng, H. The Fuzzy CMAC Based on RLS Algorithm // Applied Mechanics and Materials. – 2013. – Vol. 432. – Pp. 478–782.
- Huber, P. Robust Statistics / P. Huber, E. Ronchetti. // 2nd ed. Wiley, 2009. – P. 380.
- Hybrid Neural Network Cerebellar Model Articulation Controller Design for Non-linear Dynamic Time-Varying Plants / T. Le, T. Huynh, S. Hong, C. Lin // Frontiers in Neuroscience, 2020. – Vol. 14. – P. 695.
- Lin, C. WCMAC-based control system design for nonlinear systems using PSO / C. Lin, T. Le // Intel. Fuzzy Syst. – 2017. – Vol. 33. – Pp. 807–818.
- Lin, C. Adaptive TOPSIS fuzzy CMAC back-stepping control system design for nonlinear systems / C. Lin, T. Huynh, T. Le // Computer. – 2018. – Vol. 23. – Pp. 6947–6966.
- Lin, C. DC–DC converters design using a type- 2 wavelet fuzzy cerebellar model articulation controller / C. Lin, V. La, T. Le // Neural Comput. Appl. – 2004. – Vol. 32. – Pp. 2217–2229.
- Sun, Y. A Fuzzy Brain Emotional Learning Classifier Design and Application in Medical Diagnosis / Y. Sun, C. Lin // Acta Polytechnica Hungarica. – 2019. – Vol. 16. – № 4.
- Molecular classification of cancer: class discovery and class prediction by gene expression monitoring / Е. Golub, В. Slonim, P. Tamayo, C. Huard, M. Gaasenbeek, J. Mesirov, H. Coller, J. Downing, N. Loh, M. Caligiuri, C. Bloomfield, E. Lander // Science. – 1999. – Vol. 86. – № 5439. – Pp. 531–537.
- Zhao, J. Wavelet Fuzzy Brain Emotional Learning Control System Design for MIMO Uncertain Nonlin-ear Systems / J. Zhao, C. Lin, F. Chao // Frontiers in Neuroscience. – 2019. – Vol. 12.
- A high-performance spelling system based on EEG-EOG signals with visual feedback / M. Lee, J. Wil-liamson, D. Won, S. Fazli, S. Lee // IEEE Trans. Neural Syst. Rehabil. – 2018. – Vol. 26. – № 7. – Pp. 1443–1459.
- Kwak, N. A convolutional neural network for steady state visual evoked potential classification under ambulatory environment / N. Kwak, K. Muller, S. Lee. // PLoS One. – 2017. – Vol. 12. – № 2. –578 p.
- Design of EEG-based Drone Swarm Control System using Endogenous BCI Paradigms / D. Lee, H. Ahn, J. Jeong, S. Lee // EEE The 9th International Winter Conference on Brain-Computer Interface, 2020.
- Multimodal signal dataset for 11 intuitive movement tasks from single upper extremity during multiple recording sessions / J. Jeong, J. Cho, K. Shim, B. Kwon, B. Lee, D. Lee, D. Lee, S. Lee // Giga Science. – 2020. – Vol. 9. – № 10. – P. 98.
- Implementation of Brain Emotional Learning-Based Intelligent Controller for Flocking of Multi-Agent Systems / M. Jafari, R. Fehr, C. Garcia, L. Rodolfo, Q. Espinoza, E. Steed, N. Xu // IFAC-Papers On-Line. 50, 2017. – Vol. 50. – Pp. 6934–6939.
- Ульянов, С. В. Интеллектуальная система оценки эмоций оператора – инструментарий обработки ЭЭГ / С. В. Ульянов, А. А. Мамаева, А. В. Шевченко. // Медицинская Техника. – 2020. – Т. 2. – С. 48–51.
- Ульянов, С. В. Когнитивное интеллектуальное управление. Часть I: Система оценки эмоций оператора с применением глубокого машинного обучения на основе мягких вычислений / С. В.Ульянов, А. А. Мамаева, А. В. Шевченко // Робототехника и техническая кибернетика. – 2020. – Т. 8. – № 3. – С. 217–232.
- Mamaeva, A. A. Human Being Emotion in Cognitive Intelligent Robotic Control Pt I: Quantum / Soft Computing Approach / A. A. Mamaeva, A. V. Шевченко, S. V. Ulyanov. // Artificial Intelligence Ad-vances, 2020. – Vol. 2. – No 1. – Pp. 1–30.
- Литвинцева, Л. В. Технологии интеллектуальных вычислений : учебно-методическое пособие. Ч. 1 : Мягкие и дробные вычисления / Л.В. Литвинцева, О.Ю. Тятюшкина, С.В. Ульянов; Рец. А.П.Рыжов [и др.]. – М. : КУРС, 2020. – 288 с.
- Иванцова, О. В. Технологии интеллектуальных вычислений : учебно-методическое пособие. Ч. 2 : Квантовые вычисления и алгоритмы. Квантовый алгоритм самоорганизации. Квантовый нечеткий вывод / О.В. Иванцова, В.В. Кореньков, С.В. Ульянов; Рец. А.П.Рыжов [и др.]. – М. : КУРС, 2020. – 296 с.
- Кореньков, В. В. Технологии интеллектуальных вычислений : учебно-методическое пособие. Ч. 3 : Квантовая информационная самоорганизация неточных знаний в квантовой программной инже-нерии / В.В. Кореньков, М.Н. Левин, С.В. Ульянов; Рец. А.П. Рыжов [и др.]. – М. : КУРС, 2020. – 288 с.
- Левин, М. Н. Технология мягких вычислений. Часть 1: Интеллектуальная программная инженерия (нечеткие системы, нейронные сети и генетические алгоритмы) : учебно-методическое пособие / М.Н. Левин, Л.В. Литвинцева, С.В. Ульянов. – М. : КУРС, 2020. – 336 с.
- Левин, М.Н. Технология мягких вычислений. Часть 2: Программная системная инженерия в интеллектуальной робототехнике: научно-методическое пособие / М.Н. Левин, О.Ю. Тятюшкина, С.В. Ульянов. – М. : КУРС, 2020. – 336 с.
- Технология мягких вычислений. Часть 3: Введение в интеллектуальную робототехнику: научно-методическое пособие / А.В. Николаева, А.Г. Решетников, В.С. Ульянов, С.В. Ульянов. – М. : КУРС, 2021. – 408 с.
- Korenkov, V.V. Quantum Software Engineering (Background). Part I. Mathematical background of gate-based software engineering: Educational and methodical textbook // V.V. Korenkov, M.N. Levin, S.V. Ulyanov. – M. : KURS, 2021. – 368 p.
- Korenkov, V.V. Quantum Software Engineering (Background). Part II. End-to-end intelligent design IT of quantum algorithms: Educational and methodical textbook / V.V. Korenkov, A.G. Reshetnikov, S.V. Ulyanov. – M. : KURS, 2021. – 416 p.
- Ivancova, O.V. Quantum Software Engineering. Quantum supremacy modelling. Part I: Design IT and information analysis of quantum algorithms: Educational and methodical textbook // O.V. Ivancova, V.V. Korenkov, S.V. Ulyanov: Textbook – Dubna: Joint Institute for Nuclear Researches / INESYS (EFKO Group). – М. : KURS, 2020. – 328 p.
- Ivancova, O.V. Quantum Software Engineering. Quantum supremacy modelling. Part II: Quantum search algorithms simulator – computational intelligence toolkit: Educational and methodical textbook // O.V. Ivancova, V.V. Korenkov, S.V. Ulyanov. – M. : KURS, 2020. – 344 p.
