Инженерная методика расчета и экспериментальные исследования платформы для активной виброзащиты

Автор: Михайлов В.П., Тун Лин Аунг
Журнал: Труды Московского физико-технического института @trudy-mipt
Рубрика: Механика
Статья в выпуске: 1 (37) т.10, 2018 года.
Бесплатный доступ
Разработана инженерная методика расчета и приведены результаты эксперимен- тальных исследований платформы для активной виброзащиты, в которой используют- ся активные демпферы на основе магнитореологических (МР) эластомеров. Платформа может быть также использована как привод точного позиционирования. Свойства МР эластомера используются для регулирования параметров точности и динамики актив- ных демпферов. Для решения этих задач была экспериментально исследована работа активных демпферов при резонансе в пассивном и полуактивном режимах.
Прецизионное оборудование, магнитореологический (мр) эла- стомер, демпфер, позиционирование
Короткий адрес: https://sciup.org/142215024
IDR: 142215024 | УДК: 62-822+537.622.4
Текст научной статьи Инженерная методика расчета и экспериментальные исследования платформы для активной виброзащиты
В современном мире производство микроэлектронной продукции связано с множеством проблем, одной из которых является воздействие вибраций на. технологическое оборудование. При изготовлении микроэлектронных компонентов, размеры которых не превышают нескольких микрометров, малейшие вибрации приводят к браку, поэтому необходима. виброзащита платформ, на. которых установлено оборудование [1, 2]. В МГТУ им. Н.Э. Баумана, на. кафедре «Электронные технологии в машиностроении» была, разработана платформа для активной виброзащиты. Платформа содержит нижнюю и верхнюю плиты, четыре активных демпфера, и четыре узла, упругой подвески с массовым корректором, расположенных равномерно по периметру платформы (рис. 1). Активный демпфер содержит мембрану из МР эластомера с подвижным жестким центром, корпус, электромагнитную катушку, сердечник, основание. Сердечник образует с жестким центром воздушный зазор. Демпфер работает следующим образом: при подаче управляющего тока, в
«Московский физико-технический институт (государственный университет)», 2018
электромагнитную катушку в электромагнитной системе возникает замкнутое магнитное поле. В мембране формируется радиальное магнитное поле с индукцией, величина которой имеет максимум вблизи жесткого центра. Под действием этой магнитной индукции мембрана с жестким центром перемещается в осевом направлении в пределах воздушного зазора. Платформа для активной виброизоляции может быть также использована как привод точного позиционирования для работы в следящем режиме или режиме стабилизации положения. Свойства МР эластомера используются для регулирования параметров точности, динамики и амплитудно-частотных характеристик активного демпфера. Для решения этих задач была экспериментально исследована работа активных демпферов при резонансе в пассивном и полуактивном режимах.
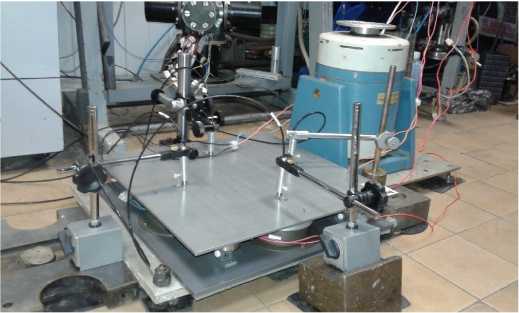
Рис. 1. Фотография экспериментального образца платформы для активной виброизоляции
2. Инженерная методика расчета
Была разработана инженерная методика расчета узла упругой подвески, который представляет собой горизонтальный маятник массой т с несущей пружиной жесткостью с и массовым корректором т^ (рис. 2). Схема горизонтального маятника с массовым корректором показана на рис. 2а, общий вид - на рис. 26. Масса маятника т представляет собой эквивалент одной четверти массы виброизолируемого объекта. Период колебаний горизонтального маятника с массовым корректором составит [3]
Х1 - mtgR ’ где J — момент инерции массы маятника J = mL2
Х 1 — угловая жесткость упругой
подвески х 1 = с12.
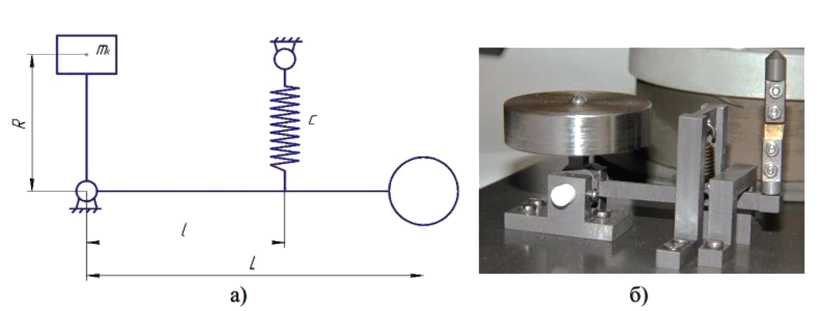
Рис. 2. Горизонтальный маятник с массовым корректором: а) схема; б) общий вид
Таким образом, узлы упругой подвески позволяют настраивать платформу для активной виброизоляции на требуемую массу объекта при помощи пружины с жесткостью с и резонансную частоту при помощи массового корректора с массой т^ [3].
3. Экспериментальные стенды
Схема экспериментального стенда показана на рис. 3. Частота и амплитуда вибраций основания задавались с помощью генератора сигналов и вибратора напольного 12 МВЭ 2/50-010. Частота вибраций изменялась в диапазоне от 10 до 200 Гц, амплитуда виброперемещений составляла около 300 мкм. Сигналы перемещений активного демпфера и основания определялись при помощи двух ёмкостных датчиков измерительной системы САРА NCDT 6200 с погрешностью измерения 0,04 мкм и диапазоном 1 мм, подавались на АЦП USB 6009 и управляющий компьютер. Фотографии стенда для определения коэффициента передачи амплитуды колебаний активного демпфера и измерительной системы показаны на рис. 4.
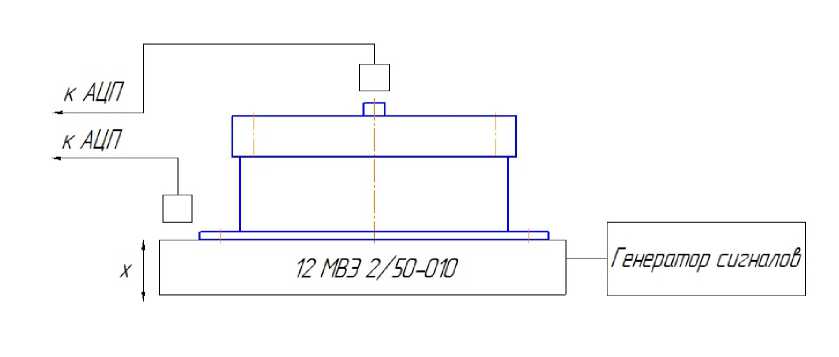
Рис. 3. Схема, стенда, для определения коэффициента, передачи амплитуды колебаний активного демпфера.

Рис. 4. Схема: а) стенда, для определения коэффициента, передачи амплитуды колебаний активного демпфера; б) измерительной системы САРА NCDT 6200
4. Результаты для исследования коэффициента передачи амплитуды виброперемещений активного демпфера
Коэффициент передачи амплитуды виброперемещений является основным параметром активного демпфера и определяется отношением амплитуд колебаний положения виброизо-лируемого объекта, и основания. Для исследования работы активного демпфера, при резо- нансе были проведены измерения амплитуд виброперемещений виброизолируемого объекта и основания на разных частотах при нулевом управляющем токе. На основе полученных данных построен график зависимости КПАВ от частоты вибраций, создаваемых генератором сигналов в диапазоне от 10 до 200 Гц с шагом 5 Гц (рис. 5).
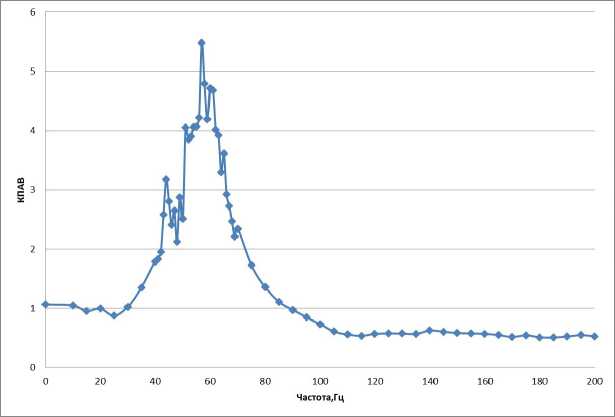
Рис. 5. Схема, стенда, для определения коэффициента, передачи амплитуды колебаний активного демпфера.
Следующим этапом исследования стало выявление эффективности снижения КПАВ при резонансной частоте демпфера, за. счёт подачи управляющего сигнала, на. демпфер в диапазоне от 0 до 1,2 А с шагом 0,05 А. На основе полученных данных построен график зависимости КПАВ от величины управляющего тока (рис. 6). Из графика на рис. 5 видно, что эффективное снижение коэффициента, передачи амплитуды виброперемещений активного демпфера, более чем в пятв раз происходит при подаче управляющего тока. 1 А.
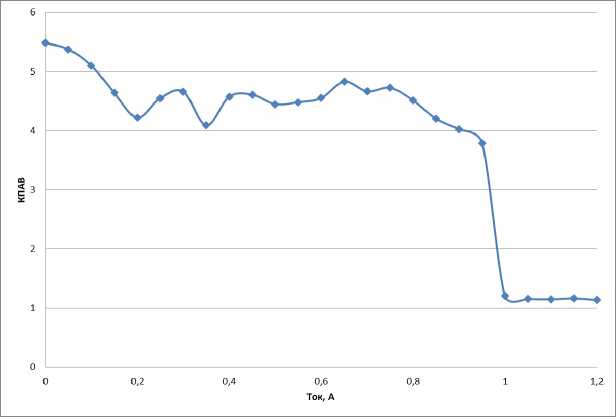
Рис. 6. Зависимость коэффициента, передачи амплитуды виброперемещепий (КПАВ) активного демпфера, при резонансной частоте колебаний от управляющего тока.
5. Заключение
Дальнейшее уменьшение коэффициента передачи достигается за счет полностью замкнутого управления активным демпфером, при котором он работает как привод точ- ного позиционирования. Для этого было проведено динамическое моделирование работы активного демпфера [4]. Была разработана структурная схема системы автоматического регулирования активного демпфера для режима активной виброизоляции в низкочастотном диапазоне при одновременном воздействии синусоидальных вибраций и ступенчатом управляющем сигнале при пошаговом перемещении демпфера на 5 мкм. Параметры воздействия: амплитуда колебаний основания демпфера - 5 мкм, частота колебаний - 4 Гц. В структурной схеме для обеспечения устойчивости и уменьшения времени переходных процессов использован ПИД-регулятор. Был получен переходный процесс САР активного демпфера. Время переходного процесса для погрешности позиционирования 0,25 мкм составляет 0,6 с. Коэффициент передачи амплитуды виброперемещений активного демпфера при этом составляет 0,02, что удовлетворяет требования к системам активной виброизоляции.
Список литературы Инженерная методика расчета и экспериментальные исследования платформы для активной виброзащиты
- Михайлов В.П., Степанов Г.В., Базиненков А.М., Зобов И.К., Шаков К.Г. Управление активной виброизоляцией и позиционированием магнитореологических устройств//Нано-и микросистемная техника. 2011. № 7. С. 5-9.
- Deulin E.A., Mikhailov V.P., Panfilov Y.V., Nevshupa R.A. Mechanics and Physics of Precise Vacuum Mechanisms: FMIA Volume 91. Series Editor by R. Moreau, Springer. 2010.
- Алабужев П.М., Гритчин А.А., Ким Л.И. . Виброзащитные системы с квазинулевой жесткостью/под ред. К.М. Рагульскиса. Л.: Машиностроение, Ленингр. отд-ние, 1986.
- Михайлов В.П., Товмаченко Д.К., Базиненков А.М., Степанов Г.В. Характеристики платформы для активной виброизоляции на основе магнитореологических эластомеров//Известия высших учебных заведений. Машиностроение. 2016. № 12. С. 51-57.
