Инженерная методика расчета параметров тормозного резистора гребного электропривода

Автор: Глеклер Е.А., Мартынов А.А., Васютин И.Д., Улитовский Д.И.
Журнал: Российская Арктика @russian-arctic
Статья в выпуске: 2 (29) т.7, 2025 года.
Бесплатный доступ
В данной статье описывается разработанная авторами инженерная методика расчета параметров тормозного резистора судового электропривода, не требующая использования сложных многоконтурных математических моделей, однако учитывающая семейство реверсивных механических характеристик гребного электродвигателя, что позволяет определить среднюю мощность, выделяемую в блок тормозных резисторов в генераторном режиме. В методике рассчитываются сопротивление и ток тормозного резистора, при этом учитывается напряжение звена постоянного тока преобразователя частоты и коэффициент заполнения импульсов транзистора. Для автоматизации расчетов авторами создана математическая модель в среде MATLAB Simulink, которая позволяет задавать параметры реверсивного режима, изменять время торможения, визуализировать процессы выделения мощности и энергии, а также оперативно получать расчетные значения электрических параметров, которые необходимы для постановки корректного технического задания для поставщика тормозного резистора. Методика обеспечивает быструю и достаточно точную оценку параметров тормозных резисторов, сокращая инженерные трудозатраты. Методика не рассматривает процессы теплопередачи и конструктивных особенностей тормозного резистора, поскольку эти задачи решают специализированные предприятия производящие судовые тормозные резисторы.
Тормозной резистор, гребной электродвигатель (ГЭД), генераторный режим ГЭД, реверсивная механическая характеристика
Короткий адрес: https://sciup.org/170210264
IDR: 170210264 | УДК: 621.316.719.3; 621.316.718.1 | DOI: 10.24412/2658-4255-2025-2-37-49
Engineering methodology for calculating parameters of the braking resistor in a propulsion electric drive
This article presents an engineering method developed by the authors for calculating the parameters of a braking resistor for a marine electric drive. The method does not require the use of complex multi-loop mathematical models, yet it takes into account the family of reversible mechanical characteristics of the propulsion motor, which enables the determination of the average power dissipated in the braking resistor block during generator operation. The methodology includes the calculation of the braking resistor's resistance and current, taking into consideration the DClink voltage of the frequency converter and the transistor pulse duty cycle. To automate the calculations, the authors developed a mathematical model in MATLAB Simulink. This model allows users to define parameters of the reverse operating mode, adjust the braking time, visualize the power and energy dissipation processes, and quickly obtain the calculated electrical parameters necessary for drafting accurate technical specifications for the braking resistor supplier. The method provides a fast and reasonably accurate estimation of braking resistor parameters, significantly reducing engineering labor. It should be noted that this methodology does not address heat transfer processes or structural aspects of the braking resistor, as these are handled by specialized manufacturers of marine braking resistors.
Текст научной статьи Инженерная методика расчета параметров тормозного резистора гребного электропривода
Одним из важных и тяжелых режимов работы гребной электрической установки (ГЭУ) является реверс гребного винта при движении судна в свободной воде с максимальной скоростью. Этот режим характеризуется выделением большого количества энергии. Эта энергия должны быть израсходованы в активных элементах ГЭУ в процессе реверса двигателя.
В судовых системах электродвижения с преобразователями частоты рекуперация энергии практически не применяется, энергия сбрасывается на блок тормозных резисторов (БТР), таким образом, расчет сопротивления резистора является важной практической задачей при разработке системы электродвижения.
Тормозные резисторы обеспечивают безопасное рассеивание избыточной энергии, возникающей при торможении двигателя. Корректный расчет сопротивления тормозного резистора необходим для предотвращения перегрева компонентов и обеспечения надёжности оборудования. В данной статье рассмотрен основной принцип расчёта параметров тормозного резистора, применимый к проекту ледокола, позволяющий обойтись без использования сложных математических моделей. Предложенные принципы расчета оформлены в виде соответствующей инженерной методики.
Материалы и методы
На данный момент существует множество научных трудов, посвященных данной теме. Среди них есть работы, которые были подробно рассмотрены авторами данной статьи и работы, которые были использованы, как теоретический материал, такие как классические учебные пособия, В.И. Полонского [10], в части особенностей гребных электрических установок и В.П. Дьяконова [8] в части моделирования в программной среде MATLAB Simulink .
Полезная информация по реверсированию гребных электродвигателей, а также о их реверсивной характеристике содержится работах [3], [4], [6]. В учебном пособии «Электроприводы переменного тока с частотным управлением» [9] есть отдельная глава, посвященная преобразователям частоты. В ней подробно описана система braking chopper , а также ее применение в силовой технике.
Статья Воронцова А.Г. [5] дала возможность провести сравнительный анализ в области компьютерного моделирования. В среде собственной разработки ComSim автор статьи проводит моделирование реверса ГЭД, при этом, рассчитывается расширенный перечень параметров системы: модель позволяет получать осциллограммы электромагнитного момента ГЭД, рассеиваемую энергию на тормозных резисторах, и при этом учитывать характеристики IGBT транзисторов и множество других параметров.
Работа Д. Андронникова [7] «Особенности выбора и применения резисторов в силовой техники» содержит в себе много полезной информации, касательно режимов работы, различных показателей эффективной работы (рассеиваемой мощности, температуры, охлаждения) тормозного резистора.
Рассмотрим некоторые известные методики расчета параметров тормозного резистора ГЭД более подробно.
В статье Малышева В.А., Иванова В.С., Соловей В.С. [1] предлагаются следующие этапы расчета.
Определяется изменение энергии системы при её переходе с частоты вращения ω1 на ш2, рад/с, за время t :
Где J – момент инерции механической части гребного электропривода (ЭП), приведенный к валу ГЭД;
Определяется изменение энергии на конденсаторе:
Где С – емкость конденсатора; U 1 – напряжение звена постоянного тока до начала реверса; U 2 – напряжение звена постоянного тока после осуществления реверса.
Значение энергии, идущее на нагрев резисторов:
W = ∆W M – ∆W C .
Энергия выделится в виде тепла:
W = Q .
С учетом максимальной рабочей температуры, выбирается тормозной резистор с большой рассеиваемой мощностью.
В соответствии с законом Джоуля-Ленца рассчитывается значение тормозного тока на резисторе:
Где t – время рассеивания энергии на резисторе: R – сопротивление тормозного резистора, выбранного ранее.
Представленные основные этапы методики дает представления об энергии, выделяющейся на тормозных резисторах, но при этом отсутствует возможность аналитически оценить значения сопротивления тормозного резистора.
В работе Вершинина В.И., Махонина С.В., Старины В.А., Хомяка В.А. [2] разработан следующий подход: исходными данными, необходимыми для выбора типов тормозных резисторов и полупроводниковых ключей чепперных блоков, являются величины мощности, рассеиваемой на резисторах, и токов, протекающих в ключах в режимах генераторного торможения ГЭД. Математическим инструментом, используемым для расчета мощности, вырабатываемой ГЭД, является уравнение движения, которое при записи в изображениях по Лапласу имеет вид:
Mэ(p) = Mc(p) ± Jpω(p),
где Mэ(p) – изображение электромагнитного момента, развиваемого ГЭД; Mc(p) – изображение статического момента нагрузки на гребном винте, приведенного к валу ГЭД; p – оператор Лапласа; ω(p) – изображение частоты вращения вала ГЭД.
Также используется выражение, связывающее мощность, вырабатываемую ГЭД в режиме генераторного торможения, с электромагнитным моментом, частотой вращения и КПД ГЭД:
где P(p) – изображение мощности; M(p) – изображение электромагнитного момента; η – коэффициент полезного действия ГЭД.
Указанные уравнения (6 и 7) позволяют вывести выражение для проведения расчета величины мощности, рассеиваемой в виде тепла на тормозных резисторах:
P(p) = (Mc (p) ± Jpω(p)) ∙ ω(p)/η
Схема компьютерной модели механической части гребного ЭП, разработанная авторами статьи [2] в соответствии с уравнением (8), представлена на рис. 1.
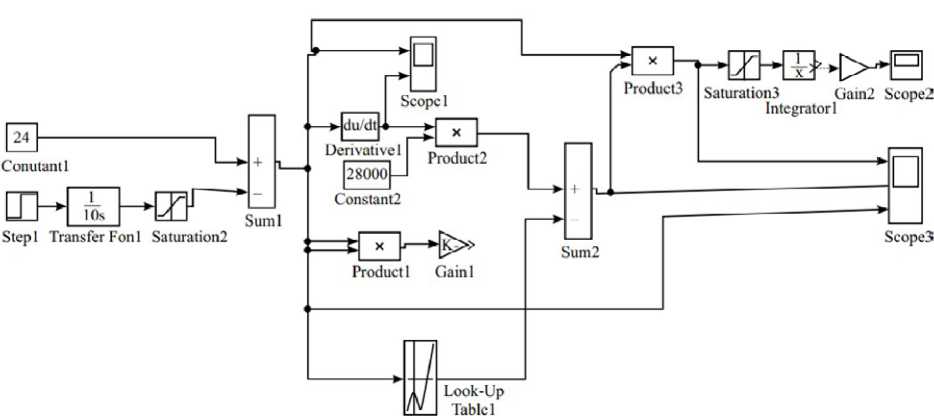
Рисунок 1. Компьютерная модель механической части гребного винта
Данная математическая модель позволяет отображать виртуальное осциллографи-рование рассеиваемой энергии и мощности на тормозных резисторах.
Величина сопротивления тормозного резистора может быть рассчитана по формуле (9):
1.44У2
R = —--
P
1 макс
■ K3-N ,
где U – величина напряжения, соответствующая половине напряжения звена постоянного тока преобразовательного канала ПЧ при его функционировании в двигательном режиме работы ГЭД, В; Р макс – величина максимального значения мощности, выделяемой на всех резисторах за время торможения ГЭД, Вт; К з – коэффициент заполнения импульсов напряжения на тормозных резистора; N – количество тормозных резисторов.
В предлагаемой методике определение параметров тормозного резистора осуществляется при помощи программной среды MATLAB Simulink , что в определенной мере упрощает саму инженерную методику и сокращает затраты времени на расчет этих параметров.
Основная часть
При изменении направления движения судна гребной электродвигатель ГЭД переходит в генераторный режим. Энергия, вырабатываемая ГЭД в этом режиме, не может быть передана в бортовую сеть судна и должна быть рассеяна на тормозных резисторах. Методика расчета параметров тормозных резисторов использует так называемую реверсивную характеристику ГЭД. Следует отметить, что эту характеристику представляет КБ-проектант ГЭД вместе с «Исходными техническими требованиями» или с «Техническим заданием». Реверсивная характеристика входит в состав механических характеристик ГЭД. Отсутствие реверсивной механической характеристики в качестве исходных данных не дает возможности достаточно точно оценить параметры и приводит к необходимости завышать исходные технические требования к тормозным резисторам.
Типичный вид механических характеристики ГЭД представлен на рис. 2.
При работе ледокола во льдах механическая характеристика, называемая как «ледовая» характеристика, проходит на графике (рис. 2) между характеристиками 1 и 2.
При необходимости изменения направления движения судна необходимо выполнить реверсирование гребного электродвигателя ГЭД. Для получения заднего хода надо изменить направление вращения гребных винтов. Зависимость момента на винте M в от частоты вращения ω при реверсе показана на рис. 2.
Для неподвижного судна реверсивная характеристика ГЭД совпадает со швартовой характеристикой (кривая 1).
Для движения судна в свободной воде реверсивная характеристика ГЭД имеет вид кривой 3. Начало реверсирования определяется точкой а, соответствующей номинальному режиму работы с номинальными значениями момента и частоты вращения. После снижения напряжения, подаваемого на ГЭД судно движется по инерции, постепенно тормозясь, а винт вращается под действием напора воды, постепенно уменьшая частоту вращения. Этот процесс представлен кривой 3, в 1-ом квадранте характеристики. На первом интервале торможения момент резко падает до нуля (точка b), частота вращения уменьшается до 0,75 номинального значения. Таким образом, точка b на характеристике 3 характеризуется значениями момента М = 0 и значением частоты вращения и = ыв. Следовательно, при частоте вращения и в, момент гребного винта равен 0, (кривая 3, участок ab). Частота вращения ωв называется буксировочной и создается встречным потоком воды, вращающим винт как гидравлическую турбину при отключенном двигателе и буксировании судна с полной скоростью. Для остановки гребного винта двигатель должен развить тормозной момент, превышающий вращающий момент, развиваемый винтом в режиме гидравлической турбины.
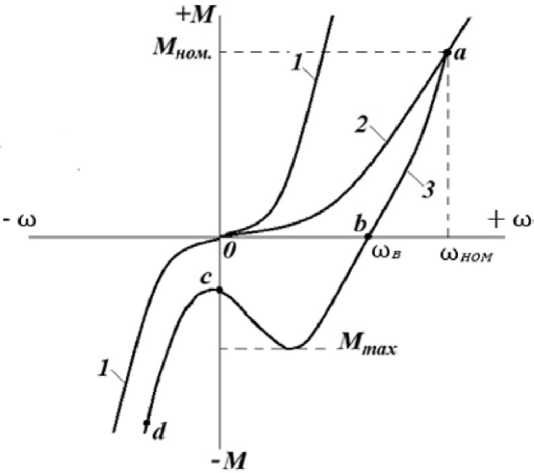
Рисунок 2. Механические характеристики гребного электродвигателя при трех режимах: 1 – работа на швартовых; 2 – ход в «свободной» воде; 3 – реверсирование движения судна
Для продолжения торможения винта надо приложить к винту вначале момент сопротивления М в = Мтах , больше момента, который создаёт (встречный) поток воды через винт. В четвертом квадранте характеристики, приведенной на рис.2, момент сопротивления на винте отрицательный, т. е. винт раскручивает двигатель. Максимальный момент сопротивления достигает почти номинального значения (в точке, отмеченной на кривой 3 значением момента Мmах ) при частоте вращения примерно равной 0,35 номинального значения. Под действием тормозного момента двигателя гребной винт останавливается (точка с ), при этом момент сопротивления достигает значения равного примерно 0,4 М ном . На участке кривой cd гребной винт вращается в противоположную сторону, причем при номинальном моменте двигателя частота вращения составляет примерно 0,4 ω ном (точка d ). Это объясняется тем, что судно идет полным ходом вперед и встречный поток воды набегает на лопасти винта с противоположной стороны и тормозит винт при вращении.
Действительные характеристики могут отличаться от расчетных характеристик. При формировании технического задания производителю тормозного резистора разработчик вводит коэффициент запаса, учитывающий возможные отличия.
Аналитический расчет параметров реверса ГЭД
При расчете тормозных резисторов необходимо рассчитать энергию и мощность торможения. В качестве исходных данных принимаются:
-
- частота вращения гребного вала на полном ходу в свободной воде и в швартовом режиме;
-
- механическая характеристика гребного винта при реверсе (реверсивная характеристика;
-
- заданное время торможения гребного электродвигателя ГЭД в свободной воде от ω N cв (номинальное значение частоты вращения в свободной воде) до нуля;
-
- заданное время торможения ГЭД в швартовом режиме от ω N шв (номинальное значение частоты вращения в швартовом режиме) до нуля;
-
- момент инерции вращающихся масс (ГЭД, вал, винт с водой), J в.с;
Эти данные представляются КБ-проектантом судна. Так, в «Исход. ных технических требованиях» рассматриваемого ледокола указано, что электропривод гребного винта должен обеспечивать:
-
- время разгона ГЭД от нуля до номинальной частоты вращения должно быть минимальным и определяется допустимой скоростью наброса мощности на генератор электрической мощности;
-
- время торможения ГЭД в швартовом режиме от начальной частоты вращения ы шв до нуля не должно превышать 10 с;
-
- время торможения ГЭД в свободной воде от начальной частоты вращения ы Nce до нуля не должно превышать 30 с;
-
- реверсирование ГЭД в режиме, близком к швартовому, при номинальной мощности, в количестве около 60 реверсов, равномерно распределенных в течение часа (с возможным повторением режима);
Для одной линии вала ледокола суммарный момент инерции J в.с, приведенный к валу ГЭД, равен 325,7 т∙м2. .
Необходимо также иметь от КБ-разработчика значения крутящих моментов и частот вращения гребного винта. Необходимые данные ледокола приведены в табл.1.
Таблица 1
Значения крутящих моментов и частот вращения гребного винта
|
Наименование характеристики |
Полный ход, около 23,8 узла |
Ход во льду, Δ = 2м (толщина льда) на скорости 12,2 узла |
Швартовый режим |
|
Крутящий момент на гребном валу Q кН-м |
2272 |
2700 |
2990 |
|
Частота вращения гребного вала, об/мин (рад/с) |
126,1 (13,2) |
110,0 (11,52) |
95,8 (10,0) |
|
Расчетное значение мощности на валу P, МВт |
29,99 |
31,104 |
29,99 |
В таблице 2 приведены числовые значения параметров, необходимых для построения реверсивной характеристики и механических характеристик ГЭД и винта. На первом этапе расчета, используя исходные данные, следует построить зависимости электромагнитной мощности ГЭД при генераторном режиме в функции частоты вращения, М э = /(ы) , мощности, поступающей на тормозные резисторы, в функции частоты вращения P R = /(ы) , мощности, поступающей на тормозные резисторы, в функции времени, P R = ft) . Для этого проводим расчет электромагнитной мощности (смотреть следующий раздел) и заполняем соответствующий столбец таблицы 2.
Таблица 2
Параметры реверсивной и иных механических характеристик
|
Номер пункта |
Скорость вращения, n , об/мин |
Частота вращения, ы , рад/с |
Момент на винте, М в , кН^м |
Электромагнитный момент ГЭД, М э , кН^м |
Мощность на винте, Р в , кВт |
Электромагнитная мощность ГЭД, Р э , кВт |
|
1 |
0 |
0 |
-1800 |
-1954 |
0 |
0 |
|
2 |
4 |
0,419 |
-2100 |
-2254 |
-880 |
-944 |
|
3 |
8 |
0,838 |
-2220 |
-2374 |
-1860 |
-1989 |
|
4 |
12 |
1,257 |
-2180 |
-2334 |
-2739 |
-2933 |
|
5 |
16 |
1,676 |
-2000 |
-2154 |
-3351 |
-3609 |
|
6 |
24 |
2,513 |
-1630 |
-1784 |
-4097 |
-4484 |
|
7 |
28 |
2,932 |
-1500 |
-1654 |
-4398 |
-4850 |
|
8 |
32 |
3,351 |
-1380 |
-1534 |
-4624 |
-5140 |
|
9 |
36 |
3,770 |
-1290 |
-1444 |
-4863 |
-5444 |
|
10 |
40 |
4,189 |
-1200 |
-1354 |
-5027 |
-5672 |
|
11 |
44 |
4,608 |
-1100 |
-1254 |
-5068 |
-5778 |
|
12 |
48 |
5,027 |
-1000 |
-1154 |
-5027 |
-5801 |
|
13 |
52 |
5,445 |
-900 |
-1054 |
-4901 |
-5739 |
|
14 |
56 |
5,864 |
-790 |
-944 |
-4633 |
-5536 |
|
15 |
60 |
6,283 |
-670 |
-824 |
-4210 |
-5177 |
|
16 |
64 |
6,702 |
-550 |
-704 |
-3686 |
-4718 |
|
17 |
68 |
7,121 |
-430 |
-584 |
-3062 |
-4159 |
|
Номер пункта |
Скорость вращения, n , об/мин |
Частота вращения, ω , рад/с |
Момент на винте, М в, кН∙м |
Электромагнитный момент ГЭД, М э , кН∙м |
Мощность на винте, Р в , кВт |
Электромагнитная мощность ГЭД, Р э , кВт |
|
18 |
72 |
7,540 |
-300 |
-454 |
-2262 |
-3423 |
|
19 |
76 |
7,959 |
-160 |
-314 |
-1273 |
-2499 |
|
20 |
80 |
8,378 |
0 |
-154 |
0 |
-1290 |
|
21 |
84 |
8,796 |
100 |
-54 |
880 |
-475 |
|
22 |
88 |
9,215 |
270 |
116 |
2488 |
1069 |
|
23 |
92 |
9,634 |
410 |
256 |
3950 |
2466 |
|
24 |
96 |
10,053 |
600 |
446 |
6032 |
4484 |
|
25 |
100 |
10,472 |
750 |
596 |
7854 |
6241 |
|
26 |
104 |
10,891 |
900 |
746 |
9802 |
8125 |
|
27 |
108 |
11,310 |
1080 |
926 |
12215 |
10473 |
|
28 |
112 |
11,729 |
1270 |
1116 |
14895 |
13089 |
|
29 |
116 |
12,147 |
1450 |
1296 |
17614 |
15743 |
|
30 |
120 |
12,566 |
1650 |
1496 |
20735 |
18799 |
|
31 |
124 |
12,985 |
1800 |
1646 |
23373 |
21374 |
|
32 |
128 |
13,404 |
2060 |
1906 |
27613 |
25548 |
|
33 |
132 |
13,823 |
2090 |
1936 |
28890 |
26761 |
|
34 |
136 |
14,242 |
2121 |
1967 |
30207 |
28014 |
На рис. 3 представлена реверсивная механическая характеристика ГЭД.
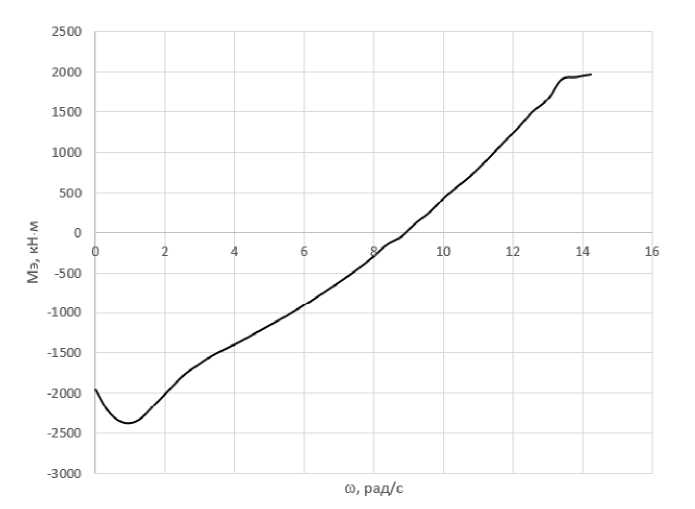
Рисунок 3. Зависимость электромагнитного момента в функции угловой частоты вращения
Расчет электромагнитной мощности и времени генераторного режима
Для расчета мощности тормозных резисторов необходимо построить зависимость электромагнитного момента в функции угловой частоты вращения, Mэ = f(ω) . Для построения этой характеристики воспользуемся уравнением движения электропривода гребного винта:
M э = M в.ст ± M в.д , (10)
где, М э – электромагнитный момент гребного двигателя;
M в.ст – статический момент нагрузки, создаваемый винтом;
M в.д – динамический момент нагрузки, создаваемый винтом при переходных процессах – разгоне или торможении вита.
^В.Д — /в.с
dw dt
где параметр — = £ – ускорение (или замедление) винта в переходном режиме.
Если параметр J в.с известен, то параметр ε можно определить как отношение приращения частоты в . ращения Δω на заданном в ТЗ интервале времени торможения Δ t .
Определим, в качестве примера, расчетное значение динамического момента для гребного винта при полном ходе в свободной воде со скоростью 23,8 узла за заданный интервал времени, равный 30 с:
dw _ 14,15 _
Это значение динамического момента можно округлить до значения, равного 154 кН∙м, и принять его при расчете реверсивной характеристики торможения ГЭД.
Определим мощность ГЭД, необходимую при работе по реверсивной механической характеристике при скорости движения судна со скоростью 23,8 узла. Для этого воспользуемся данными реверсивной характеристики, приведенные в таблице 2. Необходимо вычислить электромагнитный момент ГЭД М э = M вст - M вд для каждого из приведенных в таблице 2 значений угловой частоты вращения. .
Далее следует рассчитать мощность на винте P в = Mв-w и электромагнитную мощность ГЭД P э = M э • w и занести рассчитанные значения в таблицу 3.
По данным таблицы 3 необходимо построить график P э = f (ш) (рис. 4) и P R = f (ш) (рис. 5).
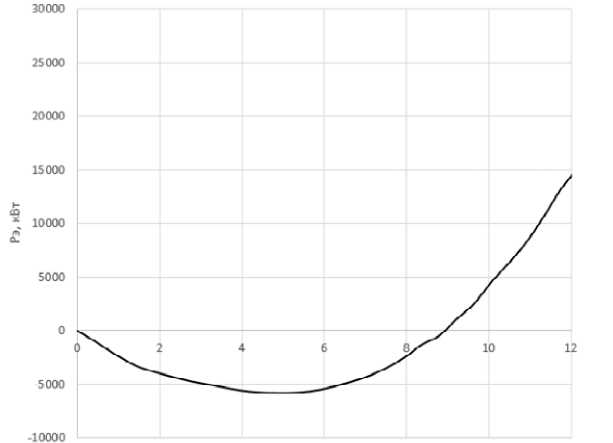
(Л, рАД/с
Рисунок 4. Зависимость электромагнитной мощности ГЭД в функции угловой частоты вращения
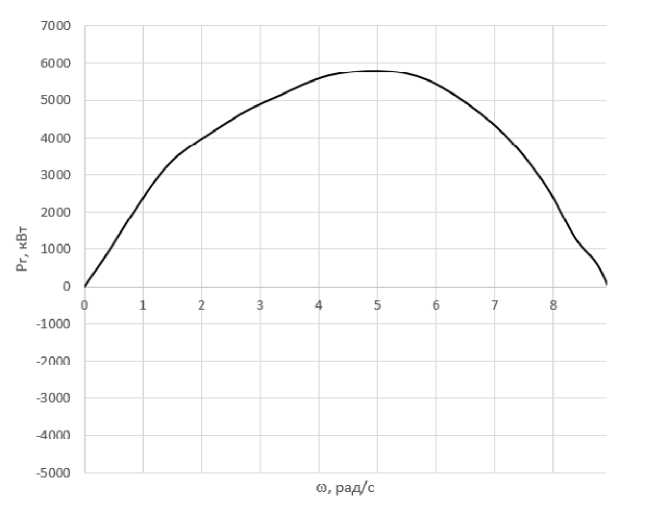
Рисунок 5. Зависимость мощности, поступающей на БТР в функции угловой частоты вращения
Максимальное значение мощности, выделяемой на БТР, составляет примерно 5,8 МВт. В первом квадранте механической характеристики ГЭД электромагнитный момент и частота вращения имеют одинаковые знаки. Это означает, что при реверсе на интервале реверсивной характеристики от 14,1476 рад/с до 8,9011 рад/с ГЭД работает в двигательном режиме и потребляет мощность от ПЧ.
При переходе в четвертый квадрант электромагнитный момент двигателя становится отрицательным и вместе с ним и мощность ГЭД. Это означает, что на участке механической характеристики 0 < ω < 8,9011 рад/с ГЭД работает в генераторном режиме и передает энергию в цепь постоянного тока преобразователя частоты, которую требуется рассеять в БТР.
С учетом того, что в «Исходных технических требованиях» указано, что время торможения ГЭД в свободной воде от частоты вращения ωNcв до нуля не должно превышать 30 с, а также с учетом того, что торможение проводится с постоянным ускорением (замедлением), можно определить время передачи энергии в БТР на интервале 0 < ω < 8,9011 рад/с, используя отношение скоростей:
tR = 30 ∙ (8,9011/14,1476) = 18,87 с . (13)
На рис. 6 приведен график зависимости мощности, поступающей на БТР, в функции времени. Отсчет времени начинается от частоты вращения ω = 8,9011 рад/с и заканчивается при частоте вращения, равной нулю.
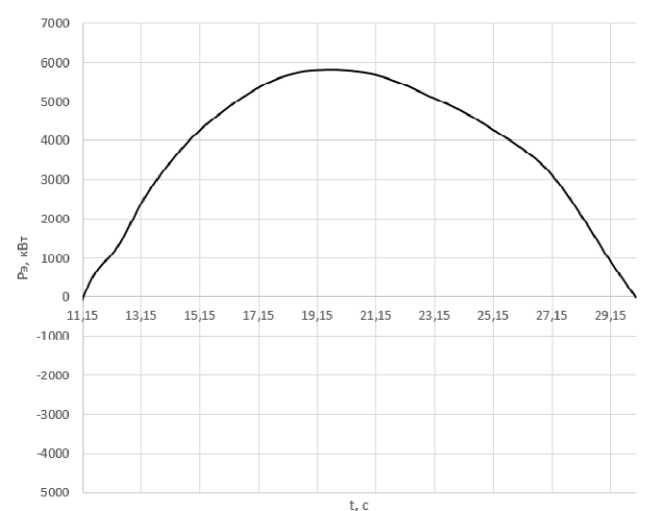
Рисунок 6. Зависимость мощности, поступающей в БТР в функции времени торможения
Расчет энергии, рассеиваемой на БТР за время реверсирования ГЭД
Используя график, приведенный на рис. 6, можно определить энергию, выделяемую в БТР. Энергия определяется произведением мощности на время, E = PR ∙ tR , т.е. площадью, ограниченной кривой PR = f (t) . Аппроксимируя кривую зависимости мощности, поступающей в БТР, в функции времени торможения синусоидой с амплитудой Pm = 5800 кВт, можно определить среднее значение мощности, выделяемой в БТР:
Р5.ср = I-)' Pm = 3692,39 кВт. (14)
Энергия, выделенная на тормозных резисторах на интервале времени передачи энергии в БТР:
E = P э.ср ∙ tR = 3692,39∙18,87 = 69,675 МДж . (15)
Гребной винт рассматриваемого ледокола приводится во вращение асинхронным двигателем мощностью 30 МВт, который выполнен с шестью трехфазными обмотками, мощность каждой из которых составляет 5 МВт. Каждая обмотка запитана от одного канала преобразователя частоты со звеном постоянного тока. В этой цепи постоянного тока включены два последовательно соединенных тормозных резистора.
Е.А. Глеклер, А.А. Мартынов, И.Д. Васютин, Д.И. Улитовский
ИНЖЕНЕРНАЯ МЕТОДИКА РАСЧЕТА ПАРАМЕТРОВ ТОРМОЗНОГО РЕЗИСТОРА ГРЕБНОГО ЭЛЕКТРОПРИВОДА
Точка соединения резисторов соединена со средней точкой цепи постоянного тока ПЧ.
Максимальное значение мощности, отводимой от одного канала ПЧ на два последовательно соединенных тормозных резисторов, составляет:
P1п = Pэ.ср/6 = 3692,39/6 = 615,398 кВт,(16)
а энергия, передаваемая одной паре тормозных резисторов, составляет
E1п= 69,675/6 = 11,61 МДж.(17)
Расчет сопротивление тормозного резистора
При значении напряжения цепи постоянного тока ПЧ, равном 5 кВ величина сопротивления двух последовательно соединенных тормозных резисторов составит:
R∑ = U2/P1п= 25∙106/615398 = 40,62 Ом.
С каждым тормозным резистором последовательно включен транзистор, работающий в ключевом режиме. Коэффициент заполнения импульсов D, как правило, выбирается в пределах от 0,5 < D < 0,7 . С учетом этого, величина сопротивления тормозных резисторов должна быть уменьшена на величину квадрата коэффициента заполнения импульса. Таким образом, величина сопротивления двух последовательно соединенных тормозных резисторов может составить от 10 Ом до 20 Ом. Величина сопротивления одного тормозного резистора может быть принята равной половине указанных значений. Энергия, которая должна быть отведена от одного тормозного резистора, составляет 11,61/2=5,805 МДж.
В случае возникновения аварийной ситуации с каналом ПЧ или БТР должна сработать защита ПЧ и прекратить подачу энергии к БТР. Эффективность торможения судна снизится пропорционально мощности аварийного БТР.
Отметим, что ГЭД вырабатывает энергию не только при реверсе с переднего хода на задний ход, но и при реверсе с заднего хода на передний ход. Однако при реверсе с заднего хода на передний ход величина отдаваемой энергии будет существенно ниже, чем при реверсе с переднего хода на задний.
Для расчета мощности и энергии при обратном реверсе необходимо запросить у КБ-проектанта реверсивную характеристику винта для обратного реверса.
Расчет параметров тормозного резистора на компьютерной модели
Математическая модель (рис. 7) выполнена в программной среде MATLAB Simulink .
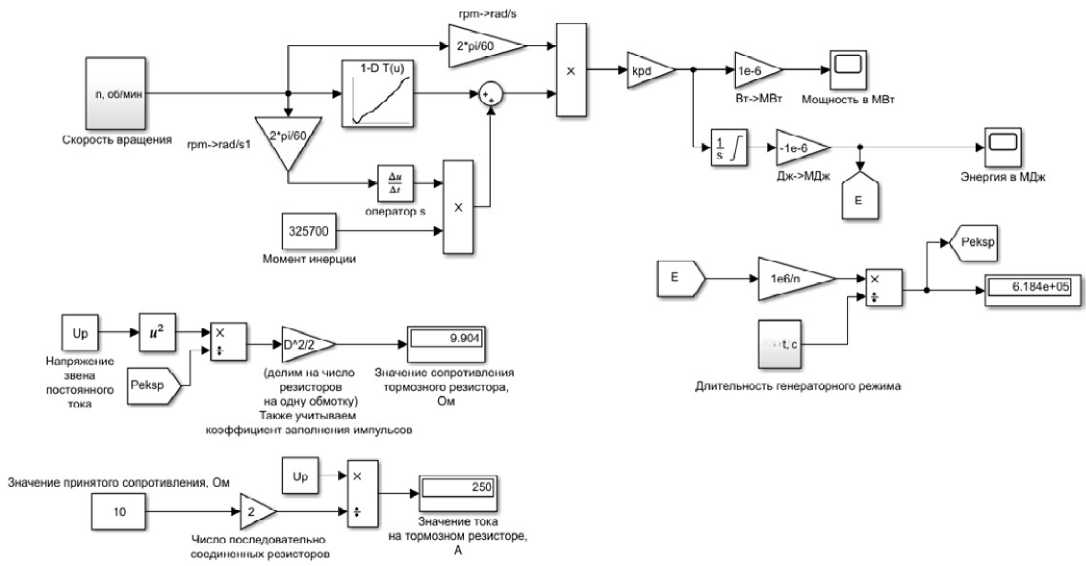
Рисунок 7. Математическая модель для расчета сопротивления тормозного резистора
Компьютерная модель способна выводить графики мощности и энергии цепи постоянного тока ПЧ при реверсе ГЭД. Имеется возможность рассчитать сопротивление и ток тормозного резистора. Модель опирается на формулы, используемые выше.
Исходными данными для моделирования являются:
-
- реверсивная характеристика (зависимость угловой частоты вращения от момента на винте из таблицы 3);
-
- суммарный момент инерции, приведенный к валу ГЭД, равный 325,7 т∙м2;
-
- время снижения частоты вращения ГЭД от максимальной частоты вращения в свободной воде (135,1 об/мин) до нуля принято равным 30 с;
-
- напряжение звена постоянного тока 5 кВ.
Полная модель по расчету параметров тормозных резисторов приведена на рис.7.
На рис. 8 и 9 представлены полученные в результате моделирования графики зависимостей мощности и энергии от времени.
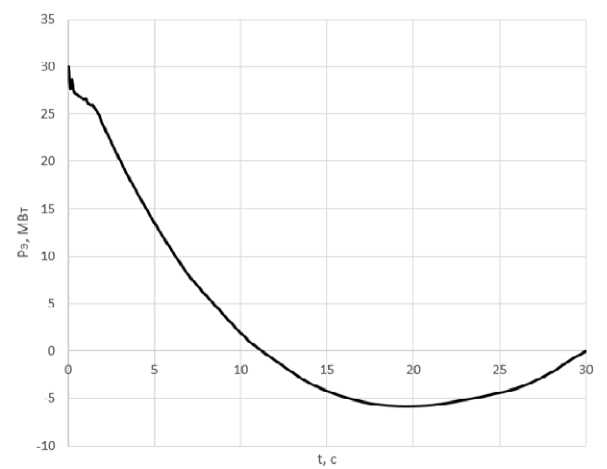
Рисунок 8. График зависимости электромагнитной мощности, рассеиваемой на БТР, от времени
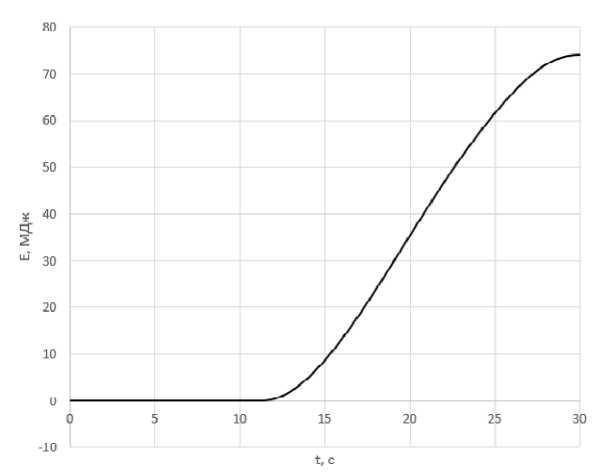
Рисунок 9. График зависимости количества энергии, рассеиваемой на БТР, от времени
Характерными плюсами разработанной модели являются:
-
- возможность сравнить результаты с аналитическим расчетом и оценить точность расчета;
-
- получение семейства характеристик, позволяющих наглядно оценить результаты расчета;
-
- снижение временных затрат, относительно аналитического подхода;
-
- увеличение точности расчета.
Заключение
Разработана структурированная инженерная методика расчета параметров тормозного резистора судового электропривода, применимая без привлечения сложных математических моделей. Расчет позволяет определить основные параметры тормозного режима: мощность, энергию, сопротивление и ток, рассеиваемые на блоке тормозных резисторов при реверсировании гребного электродвигателя. Разработанная методика может быть реализована практически на любой платформе, например, расчётный файл excel или программа на удобном языке программирования. Авторами были опробованы несколько вариантов реализации, в том числе с применением MATLAB Simulink. Удобная визуализация в MATLAB Simulink позволяет инженеру автоматизировать процесс расчета, оперативно варьировать входные параметры и получать визуализацию выходных данных. Разработанная методика была применена инженерами РУСЭЛПРОМ при расчёте параметров тормозного резистора ледокола-лидера проекта 10510.
