Использование фазированной антенной решетки в качестве магнитного исполнительного органа системы ориентации

Автор: Ковтун Владимир Семенович, Кочергина Марина Николаевна
Журнал: Космическая техника и технологии @ktt-energia
Рубрика: Динамика, баллистика, управление движением летательных аппаратов
Статья в выпуске: 4 (11), 2015 года.
Бесплатный доступ
В настоящее время широко применяются плоские активные фазированные антенные решетки (АФАР) космического базирования для решения задач обеспечения радиолокации и персональной спутниковой связи. Как правило, АФАР имеют рабочие поверхности большой площади. Проектируемые современные космические аппараты, содержащие АФАР, для поддержания ориентации используют силовые гироскопы. В работе рассматривается возможность использования АФАР существующих конструкций в качестве магнитного исполнительного органа для разгрузки силовых гироскопов от накопленного кинетического момента. В процессе взаимодействия собственных магнитных моментов токовых контуров электропитания излучателей решетки с магнитным полем Земли создается управляющий момент, противоположно направленный накопленному кинетическому моменту в системе силовых гироскопов. Значения собственных магнитных моментов зависят от функционального предназначения АФАР и принятых конструкторских решений, связанных с протеканием токов по цепям первичного и вторичного электропитания. Преимущество применения АФАР в качестве исполнительных органов заключается в том, что они не требуют дополнительного увеличения массы космического аппарата для проведения динамических операций.
Фазированная антенная решетка, силовые гироскопы, кинетический момент, магнитный момент, управляющий момент, магнитный исполнительный орган
Короткий адрес: https://sciup.org/14343498
IDR: 14343498 | УДК: 629.78.054:621.396.67
Use of phased antenna lattice as magnetic actuator of orientation system
At the moment, space based flat phased antenna lattices (PAL) have found broad application for the problem solving of provision of personal satellite communications. Normally, PALs have large square working surfaces. Modem spacecrafts under design with PAL use powered gyroscopes for orientation maintenance. This article looks into possibility of PAL use (existing designs) as magnetic actuator for unloading of kinematic momentum. In the process of interaction between intrinsic magnetic moments of the current loops of the array power supply and the Earth magnetic field, a control moment is generated which is directed oppositely to kinetic moment accumulated in the system of control moment gyros. The values of the intrinsic magnetic moments depend on the intended functionality of the PAL and the implemented design solutions related to current flows in the primary and secondary power supply circuits. The advantage of using PAL as final control devices consists in the fact that they do not require any additional increases in the mass of the spacecraft in order to conduct dynamic operations.
Текст научной статьи Использование фазированной антенной решетки в качестве магнитного исполнительного органа системы ориентации
КОВТУН В.С.

КОЧЕРГИНА М.Н.
Предлагаемое техническое решение заключается в использовании токовых контуров, применяемых для питания приемопередающих модулей (ППМ) активных фазированных антенных решеток (АФАР) космических аппаратов (КА), в задачах управления движением КА относительно центра масс. Указанные контуры, обладающие собственными управляемыми магнитными моментами, при взаимодействии с магнитным полем Земли (МПЗ) создают магнитные управляющие моменты. В свою очередь, управляющие моменты предлагается использовать для разгрузки силовых гироскопов (СГ) от накопленного кинетического момента по аналогии c магнитными исполнительными органами (МИО).
Описание конструкции фазированной антенной решетки
Первичным элементом АФАР являются излучатели радиосигнала [1]. Круговая управляемая (переключаемая), левого или правого направления вращения, поляризация излучения и приема сигналов может быть получена в системе ортогонально поляризованных излучателей с совмещенным фазовым центром. Примером такой системы является излучатель на основе плоского прямоугольного волновода с размещенными внутри него четырьмя дисковыми излучателями (рис. 1).
В другом варианте излучатель представляет собой металлическую пластину в виде четырехлучевой звезды, размещенную над проводящим экраном (рис. 2). Возбуждение излучателя производится в вершинах ее лучей.
При этом вершины лучей, расположенных на одной диагонали, возбуждаются противофазными сигналами.
Построение АФАР осуществляется из панелей, состоящих из набора модульных элементов (рис. 3). Каждый модульный элемент состоит из антенного полотна, выполненного в виде многослойной печатной платы, разделенного на ячейки (в качестве примера: всего 64 квадратных ячейки, с размещением 8 x 8). Внешний вид рабочей поверхности модулей зависит от набора излучателей одного из видов, примеры которых представлены на рис. 1, 2.

Рис. 1. Излучатель на основе отрезка прямоугольного волновода

Рис. 2. Излучатель в виде четырехлучевой звезды
На примере устройства, реализующего метод формирования диаграммы направленности плоской АФАР, обеспечивающего низкий уровень бокового излучения сигнала, рассмотрим размещение токовых контуров, применяемых для питания ППМ [2]. Для этого в каждой ячейке модульного элемента разместим ППМ, содержащий излучатель, согласующую цепь, усилитель мощности (являющийся основным потребителем электро энергии), аттенюатор и фазовращатель. При этом блоки управления аттенюаторами и фазовращателями, блок питания, распределительное устройство и устройства управления лучом и коррекции применяются по одному для нескольких ППМ одновременно [2], а их размещение на панелях позиционируется с размещением ППМ и производится внутри полотна на стыках модульных элементов.
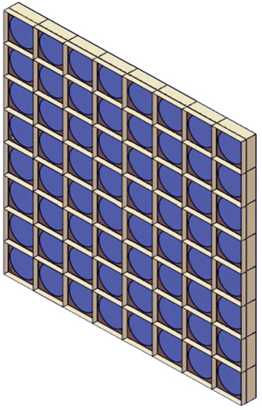
Рис. 3. Конструкция модульного элемента активной фазиро- ванной антенной решетки
Высокочастотные токи, протекающие по несимметричным микрополосковым линиям и излучателям ППМ, постоянных магнитных моментов не создают [1]. Кроме указанных токов, в АФАР протекают токи по цепям первичного и вторичного электропитания ППМ, которые обладают собственными магнитными моментами [3].
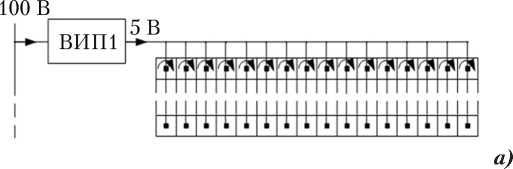
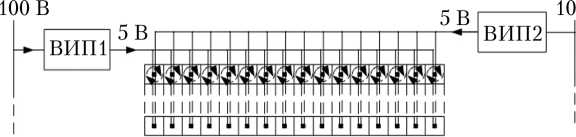
Схема токовых контуров вторичного электропитания ППМ, спроецированная на рабочую поверхность модуля АФАР, представлена на рис. 4, где показаны направления тока в модулях. Первичное электропитание обозначено линией с напряжением 100 В, а вторичное — линией с напряжением 5 В. При этом на рис. 4, а показана схема раздельного электропитания модулей от вторичных источников питания (ВИП) ВИП1 и ВИП2 с разнонаправленным движением тока, а на рис. 4, б — с возможностью электропитания модуля от одного из двух ВИП. Стрелками показаны направления тока в ППМ.
5В
№маияаааааааааэд
|1|1|1|Ч1|Ш1чич1|1|1|1т
б)
Рис. 4. Схема токовых контуров вторичного электропитания приемопередающих модулей: а — раздельного электропитания модулей; б — с возможностью питания от одного из двух ВИП
Примечание. ВИП — вторичный источник питания.
100 В
ВИП2
Для примера рассмотрим ток потребления ППМ 30…40 мА, площадь контура, которую он охватывает в одной ячейке ~2,5∙10–3 м2. Количество ППМ в АФАР, состоящей из четырех панелей, в каждой из которых 64 модульных элемента, содержащих по 64 ППМ (см. рис. 3), составит 16 384 шт. Исходя из примерных исходных данных, суммарный ток по цепям вторичного электропитания ППМ составляет ~500…650 А, а общая площадь контуров ~41 м2.
Использование фазированных антенных решеток для разгрузки силовых гироскопов космических аппаратов
В качестве примера рассмотрим КА, оснащенный АФАР и системой СГ, находящийся на геостационарной орбите (ГСО), с ориентацией в орбитальной системе координат. При этом рабочая поверхность АФАР перпендикулярна радиусу-вектору КА при работающей антенне. Токовые контуры питания ППМ находятся в плоскости рабочей поверхности АФАР. В таком слу ч ае собственный магнитный момент АФАР , перпендикулярный рабочей поверхности антенной решетки, можно расположить на радиусе-векторе КА, при этом выбор направления указанного вектора будет зависеть от направления тока в контурах питания ПП М при работе АФАР. Вектор индукции МПЗ на ГСО перпендикулярен плоскости орбиты. Следовательно, управляющий момент
L (1)
будет находиться в плоскости орбиты.
Введем направления осей связ а нного базиса КА через единичные векторы: х — о сь, ориентируемая по направлению полета; y — ось, ориентируемая вдоль бинормали; z — ось, ориентируемая по радиусу-вектору в сторону центра Земли.
Общая разгрузк а от накопленного кинетического момента H = ( HX, HY, HZ ) системы СГ аппарата, ориентированного в орбитальной системе координат, сводится к разгрузке от двух составляющих указанного момента: HY , направлен н ой перпендикулярно плоскости орбиты, и H = ( HX, HZ ), лежащей в плоскости орбиты [4]. КА, ориентированный относительно орбитального трехгранника, в инерциальной системе координат вращается вокруг бинормали к орбите. Поэтому составляющая вектора кинетичес к ого момента, лежащая в плоскости орбиты H = ( HX, HZ ), попеременно совпадает с осями х и z КА.
Следовательно, в рассматриваемом случае (1) разгрузку СГ с использованием АФАР можно производить только в плоскости орбиты, т. е. от двух составляющих накопленного кинетического момента H = (HX, HZ) [4].
Как правило [5–7], применяемые методы разгрузки силовых гироскопов КА от накопленного кинетического момента с использо- ванием управляющего магнитного момента включают в себя:
-
• измерение текущего значения в ектора накопленного кинетического момента H в системе СГ;
-
• измерение вектора индукции МПЗ ;
-
• определение получаемого в рез у льтате взаимодействия магнитных моментов токовых контуров с МПЗ единичного вектора разгрузочного момента m
m L B; L B
-
• формирование сигнала управления на токовые контуры КА путем изменения величины и направления протекания тока для обеспечения условий разгрузки СГ от накопленного кинетического момента
m x h < 0, (3) где h H H .
Для получения вновь вводимого эффекта предлагается дополнительно выполнять следующие действия:
-
• измерить значения токов в контурах питания Ipq и площади Spq контуров в q -ых контурах вторичного питания ППМ, где q = 1, 2, …, Q — число токовых контуров в каждом p -м режиме работы АФАР, где р = 1, 2, …, Р — число режимов работы АФАР, при которых изменяется питание ППМ;
-
• определить направления нормалей n pq обхода токовых контуров;
-
• определить магнитные моменты для
каждого токового контура pq = IpqSpqnpq;
-
• определить по магнитным моментам для каждого токового контура (4) значение магнитного момента АФАР в каждом p -м режиме ее работы
L L ; (5)
p pq q=^
-
• определить значения единичных векторов m р разгрузочных моментов (2), создаваемых в результате взаимодействия магнитных мом е нто в АФАР с магнитным полем Земли при = p ;
-
• определить по выполнению условия разгрузки СГ (3) от накопленного кинетического
момента, где m = m р , p -е режимы работы АФАР p е Р для проведения разгрузки С Г от накопленного кинетического момента;
-
• определить значения проекции вектора разгрузо ч ного момента h Mp на направление вектора h
k h M p । = ILp х Б|( h х m p ) (6)
где mp , p — значения векторов mр , р для p -ых режимов работы фазированной антенной решетки;
-
• опред е лить по максимальному значению max | кhMp | p'-й режим работы АФАР для разгрузки системы СГ;
-
• включить в работу p'-й режим работы ФАР и в случае выполнения условия
т , , х h > 0, (7) где m p- - значение вектора т р для p ' -го режима;
-
• произвести повторное формирование разгрузочного момента (для выполнения условия (3)) путем изменения режима работы АФАР;
-
• прекратить формирование сигнала управлени я для разгрузки СГ при получении значения H = 0.
Величина тока в контуре питания ППМ и направление его протекания могут определяться режимами работы АФАР — «приема», «передачи», «приема–передачи», с изменениями при этом мощности сигнала в приемо-передающем тракте. Возможны также развороты токовых контуров питания ППМ (см. рис. 4), неиспользование всей площади рабочей поверхности ФАР. Схемы питания предполагают изменения в формировании токовых контуров на плоской конструктивной поверхности АФАР либо частичного отключения отдельных антенных решеток (переход в нерабочий режим). На конечные значения тока и площади контура могут влиять технологические особенности изготовления АФАР, а также допустимые отклонения в работе электрических преобразователей, через которые обеспечивается питание отдельных ППМ, модулей и панелей.
Поэтому после изготовления АФАР, до начала ее эксплуатации, предварительно измеряют в q -ых ППМ, в каждом p -м режиме работы АФАР значения токов в контурах питания Ipq и площадей Spq контуров. Для измерений площади применяют термографы (тепловизоры) — различного рода инфракрасные камеры, использующие длину волн от среднего инфракрасного до терагерцово-го диапазона. В результате получают снимки электрических (или тепловых) полей для используемых типов схем питания ППМ в разных режимах их работы, по которым измеряют площади токовых контуров [1].
Направления нормалей n pq к каждому токовому контуру питания П p П q М определяют, исходя из логики работы переключателей антенной решетки по алгоритму коммутации схемы питания. По полученн ы м данным определяют магнитные моменты рq .
В результате, для каждого модуля (панели) АФАР можно определить величину и направление указанных векторов. При этом указан н ые в е кторы могут иметь как положительные £+ 1 ,..., Z+ n , n = 1, 2,„., N, N с Q (рис. 5), так и отрицательные Z- 1 ,..., , m = 1, 2, ..., M, M с Q направления (рис. 6). Модули указанных векторов могут также отличаться между собой, так как при фиксированной площади контура токи протекания могут быть разными. По определенным значениям собственных магнитных моментов для каждого модуля находят магнитные моменты для панели ФАР в целом.
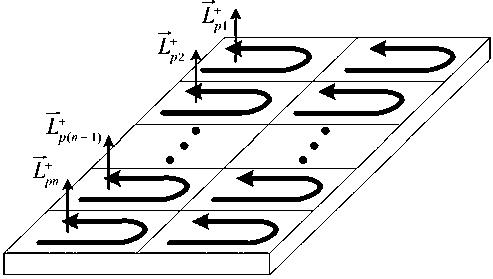
Рис. 5. Положительные направления магнитных моментов токовых контуров
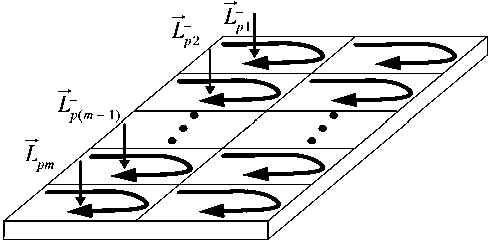
Рис. 6. Отрицательные направления магнитных моментов токовых контуров
Таким образом, в результате, по выражению (5) определяют значение собственного магнитного момента панели АФАР в каждом p -ом режиме ее работы, при этом значения q могут принимать как n- е, так и m -e значения.
Следовательно, экспериментально-расчетным методом определяется собственный магнитный момент модуля (панели) АФАР в каждом p-ом режиме работы, где р = 1, 2, …, Р. В одних и тех же функциональных режимах разными способами коммутации питания модулей (панелей) могут создаваться магнитные моменты разного знака. Таким образом, направленно, за счет управляемого тракта питания отдельных модулей, обеспечивается формирование режимов работы панелей АФАР, в которых суммируются только положительные ( р := +∑) или только отрицательные ( р:= ∑–) магнитные моменты.
В определенных режимах работы векторы разных знаков взаимно компенсируются, в таких случаях п анель является «магнитоуравновешенной» ( р = 0). При отключении питания АФАР также является «магнитоуравновешенной». Если на КА установлено несколько таких панелей, то определяют их суммарный магнитный момент по ранее указанному выражению (5). При этом суммируют магнитные моменты всех токовых контуров питания ППМ АФАР, полученных в составленных панелях. В таких случаях «магнитоуравновешенность» в целом может достигаться за счет равных противоположно направленных собственных магнитных моментов токовых контуров в парных панелях. В случае использования в работе одной из панелей, задействованных в паре, появляется соответствующая составляющая магнитного момента, присущая только работающей панели.
Следовательно, существует несколько путей управления режимами работы АФАР для получения положительных или отрицательных собственных магнитных моментов, создаваемых всеми токовыми контурами питания ППМ АФАР, или получения условия их «магнитоуравновешенности».
На рис. 7 представлена схема разгрузки СГ от накопленного кинетического момента с использованием АФАР.
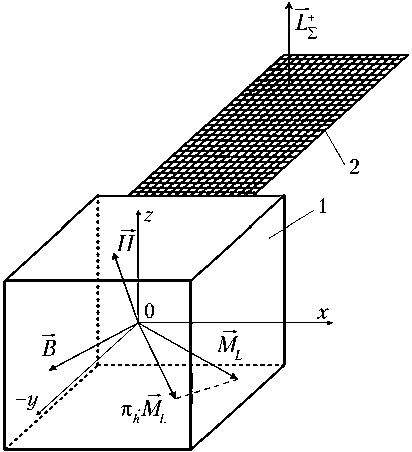
Рис. 7. Схема разгрузки силового гироскопа от накопленного кинетического момента с использованием активной фазированной антенной решетки: 1 — космический аппарат (КА); 2 — панель фазированной антенной решетки; OXYZ — связанный базис КА, оси которого совпадают с главными центральными осями инерции, построенный с учетом ранее выбранных направлений осей КА
Указанный на схеме управляющий момент L обеспечивает разгрузку СГ от на- копленного кинетического момента, так как за счет тупого угла между векторами L и H выполняется условие (3) для mр = m, = р = +∑.
При этом m ∑ .
p + ∑
p
Рассмотренный пример является частн ы м случаем разгрузки СГ, поскольку вектор р , соответствующий одному из возможных режимов работы АФАР, может иметь и другие значения при выполнении условия (3) в p- ых режимах работы АФАР. Следовательно, необходимо оценить каждый из возможных вариантов разгрузки СГ для последующего выбора наиболее эффективного режима работы АФАР с точки зрения достижения поставленной цели разгрузки СГ, при сохранении основного функционального предназначения решетки.
Для этого определяют p -е режимы работы АФАР из конечного множества P возможных режимов ее работы, при которых будет производиться разгрузка системы СГ от накопленного кинетического момента ( p е P ), исходя из выполнения условия (3). При это м определяют значение магнитного момента p АФАР в каж д ом p - м ре ж име ее работы, а также значе ни е m p пр и р = p . Далее для каждого вектора M p = Р - х В определяют по выражению (6) его проекцию на направление вектор а h .
А Из полученного множества ц(лhMp), p = 1, 2, ..., Р, p е P^определяют максимальное значение max | h Mp |, по которому, в свою очередь, выбирают р'-й режим работы АФАР для разгрузки системы СГ от накопленного кинетического момента. Выбранное наибольшее из возможных значение проекции разгрузочного момента на направление вектора накопленного кинетического момента в системе СГ позволяет минимизировать продолжительность разгрузки и, тем самым, максимально эффективным образом достичь ее цели.
В процессе разгрузки СГ контролируют наличи е накопленного кинетического момента, т. е. H ≠ 0, а также выполнение условия (7) отсутствия разгрузки с учетом использования управляющего магнитного момента с единичным вектором mp-, свойственного для р'-го режима работы АФАР.
Как следует из (7), разгрузка СГ невоз м ожн а в случае, когда угол между векторами L и H становится прямым. В случае острого угла между указанными векторами система СГ будет дополнительно нагружаться кинетическим моментом от действия на КА рассмотренного управляющего момента.
В случае выполнения указанного условия (7), для обеспечения дальнейшей разгрузки производят повторное формирование разгрузочного момента вышеуказанным образом. При этом значения магнитного момента АФАР определяются по выражению (5) для каждого p -го режима ее работы на момент времени выполнения условия (7).
Далее продолжают разгрузку СГ до ее завершения (до получения значения H = 0). Формирование сигнала управления для разгрузки СГ прекращают выбором одного из «магнитоуравновешен н ых» режимов работы решетки, при котором р = 0.
Для случая однонаправленного расположения магнитных моментов токовых контуров в цепях вторичного электропитания АФАР, порядок величин суммарного значения собственного магнитного момента может составлять
L = \Lp ^~ 1-10 4 А-м2.
Конкретные значения собственных магнитных моментов АФАР зависят от их функционального предназначения и конструкторских решений, связанных с протеканием тока по цепям первичного и вторичного электропитания. При этом необходимо отметить, что в процессе конструирования КА с АФАР требуется исключить влияние магнитных моментов на работу бортовой аппаратуры, в частности, на показания магнитометров, измеряющих составляющие внешнего МПЗ.
Далее, проведем оценку управляющего момента для КА, содер ж ащего АФАР и находящегося на ГСО, где \В\ « МО-7 Тл. При этом рассмотрим случай ш т атн о й ориентации КА на ГСО, когда векторы и взаимно перпендикулярны. Тогда модуль управляющего момента ML будет равен
ML = |L х В \ « 1^10-3 Н-м.
Сравнительные оценки показали, что полученный магнитный управляющий момент имеет тот же порядок величин, что и суммарные моменты гравитационных сил и сил светового давления, действующих на КА [8].
В статье в качестве примера рассмотрен один из возможных (наиболее типичных) вариантов разгрузки системы СГ от накопленного кинетического момента с использованием АФАР. При этом АФАР рассмотрена как однокомпонентный МИО системы ориентации. Известно [4], что для разгрузки от накопленного кинетического момента в СГ по трем осям КА, ориентированного в орбитальной системе координат, необходимо иметь двухкомпонентный МИО, а в случае поддержания инерциальной ориентации КА — трехкомпонентный.
В настоящее время применяются варианты одноместного размещения АФАР на КА. При проектировании размещения АФАР в нескольких местах на КА в каждом конкретном случае необходимо рассматривать установку каждой решетки как «дополнительной компоненты» МИО.
Выводы
Плоские фазированные антенные решетки, установленные на КА, могут использоваться как магнитные исполнительные органы системы управления ориентацией, в частности, для разгрузки СГ от накопленного кинетического момента. Преимущество применения АФАР в качестве исполнительных органов заключается в том, что они не требуют дополнительного увеличения массы КА для проведения динамических операций.
Применение АФАР позволяет, за счет безрасходной разгрузки СГ, экономить топливо ракетных двигателей, которые необходимо было бы задействовать для решения аналогичных задач. При этом порядок величин управляющих моментов, создаваемых АФАР, позволяет применять их для парирования внешних возмущающих моментов другой природы — гравитационного и от сил светового давления. Особенно это становится актуальным для крупногабаритных КА «гантельного» типа.
Список литературы Использование фазированной антенной решетки в качестве магнитного исполнительного органа системы ориентации
- Вендик О.Г., Парнес М.Д. Антенны с электронным движением луча/Под ред. Бахраха Л.Д. СПб., 2001.252 с.
- Габриэльян Д.Д., Звездина М.Ю., Цитрина И.Г., Шацкий В.В., Шацкий Н.В. Формирование диаграммы направленности плоской активной фазированной антенной решетки с произвольной границей раскрыва//Журнал радиоэлектроники. 2012. № 12. С. 40-58.
- Воробьев С. Выбор элементной базы для систем вторичного электропитания приемопередающих модулей АФАР//Компоненты и технологии. 2014. № 10. С. 36-40.
- Шереметьевский Н.Н., Бихман РИ. Простая надежная система сброса кинетического момента для искусственных спутников Земли, ориентированных в орбитальной системе координат/В сб. Управление в пространстве. Т. 1. М.: Наука, 1976. С. 110-118.
- Кирилин А.Н., Ахметов Р.Н., Соллогуб А.В., Макаров В.П. Методы обеспечения живучести низкоорбитальных автоматических КА зондирования Земли. М.: Машиностроение, 2010. 384 с.
- Патент RU 2030338 С1. МКИ В 64 G 1/28. Российская Федерация. Способ формирования разгрузочного момента для системы силовых гироскопов космического аппарата с солнечными батареями. Ковтун В.С., Кузьмичев А.Ю., Платонов В.Н; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 5039039/22 от 20.04.1992; приоритет от 10.03.1995//Изобретения. 1995. № 7.
- Богачев А.В., Платонов В.Н., Тимаков С.Н. Анализ возможности обеспечения точностных характеристик стабилизации перспективного космического аппарата, предназначенного для дистанционного зондирования Земли//Космонавтика и ракетостроение. 2013. № 2. С. 83-89.
- Патент RU 2176972 С1. МКИ В 64 G 1/24. Российская Федерация. Способ определения магнитного момента солнечных батарей космического аппарата с системой силовых гироскопов. Ковтун В.С., Банит Ю.Р; заявитель и патентообладатель -ОАО РКК «Энергия»; заявка 2000130187/28 от 05.12.2000; приоритет от 5.12. 2000//Изобретения. 2001. № 35. Статья поступила в редакцию 03.09.2015 г.
