Использование фотоизображений с целью определения геометрических параметров крупногабаритных объектов

Автор: Попов Евгений Владимирович, Раскаткина Ольга Валерьевна
Рубрика: Инженерная геометрия и компьютерная графика
Статья в выпуске: 3 т.19, 2019 года.
Бесплатный доступ
В современной индустриальной и градостроительной практике существует огромный класс конструкций, контроль геометрических размеров которых очень важен и в то же время чрезвычайно сложен по ряду обстоятельств: труднодоступность, опасность нахождения рядом с конструкцией во время ее работы и пр. Такими конструкциями являются, например, детали корпуса судна, антенны радиолокационных радаров, высотные здания, башни, дымовые трубы, градирни и многие другие. Традиционно контроль геометрии объектов, в том числе и упомянутых, осуществлялся измерением рулеткой и сравнением замеров с размерами на чертежах. В условиях современного производства такой способ обладает рядом существенных недостатков, таких как низкая точность, большая длительность выполнения замеров, непосредственный контакт с объектом и др., хотя и применяется часто по причине того, что является самым дешевым. Однако в подавляющем большинстве случаев контакт с подобными конструкциями либо затруднен, либо невозможен. В статье описан метод обработки фотоизображений с целью определения геометрических параметров крупногабаритных и труднодоступных объектов. Рассмотрены возможные способы формирования референтных линий на фотоизображениях. Описана технология определения крена высотных сооружений типа дымовых труб на основе их фотоизображений. Приведены результаты экспериментального исследования влияния расположения референтной линии относительно оси дымовой трубы на точность определения ее крена с помощью фотографического метода.
Обработка фотоизображений, крупногабаритный объект, референтная линия, фотографический метод
Короткий адрес: https://sciup.org/147232145
IDR: 147232145 | УДК: 624-2/-9 | DOI: 10.14529/build190307
Using photo images to determine the geometric parameters of large objects
There is a huge class of structures in modern industrial and urban planning practice, the control of geometrical dimensions of which is very important. At the same time this process is extremely difficult for several reasons: inaccessibility, danger of being close to the structure during its operation, etc. For instance, such structures are the following: ship hull structures, radar antennas, high-rise buildings, towers, chimneys, cooling towers and many others. Traditionally, the geometry control of objects including the ones mentioned above was carried out by measuring by a ruler and comparing the measurements with drawings. In terms of modern production, this method has a number of significant drawbacks, such as low accuracy, long duration of measurements, direct contact with the object, etc., although it is often used due to its cheapness. However, in the overwhelming majority of cases, contact with such structures is either difficult or impossible. The paper describes the processing of photo images in order to determine the geometric parameters of large and inaccessible objects. It considers possible ways of forming reference lines on photo images. The technology for determining the roll of high-rise buildings such as chimneys based on their photo images is presented. We also describe some results of an experimental study of the influence of the location of the reference line relative to the axis of the chimney on the accuracy of determining its roll using the photographic method.
Текст научной статьи Использование фотоизображений с целью определения геометрических параметров крупногабаритных объектов
Определение и мониторинг геометрических параметров изделий осуществляется в промышленном производстве для решения задач контроля и оценки создания и функционирования изделий. В настоящее время большинство проектных и эксплуатационных предприятий используют контактный метод измерения, предполагающий непосредственное физическое взаимодействие с измеряемым объектом. Часто контроль геометрии изделий осуществляется измерением рулеткой и сравнением замеров с размерами на чертежах. В условиях современного производства такой способ обладает рядом существенных недостатков, таких как низкая точность, большая длительность выполнения замеров, непосредственный контакт с объектом и др., хотя и применяется часто по причине того, что является самым дешевым. Существует огромный класс конструкций, контроль геометрических размеров которых очень важен и в то же время чрезвычайно сложен по ряду обстоятельств: трудно-доступность, опасность нахождения рядом с конструкцией во время ее работы и пр. Такими конструкциями являются, например, детали корпуса судна, антенны радиолокационных радаров, высотные здания, башни, дымовые трубы, градирни и т. д.
В связи с необходимостью постоянного контроля геометрических параметров крупногабаритных сооружений или объектов вследствие их конструктивных особенностей и при постоянном влиянии на них техногенных и природных факторов требуется разработка новых методов, позволяющих в кратчайшие сроки и с использованием менее затратных приспособлений осуществлять этот контроль. В настоящее время существуют измерительные системы, использующие бесконтактный метод измерения и позволяющие осуществлять точные автоматические замеры и фиксировать нарушения геометрии изделия [1–5]. Среди систем бесконтактных измерений геометрических параметров крупногабаритных объектов следует отметить систему, использующую стандартный электронный тахеометр совместно с программным обеспечением отечественной разработки [6–8]. Однако в подавляющем большинстве случаев в сложных полевых условиях не всегда удается использовать такие подходы по разным причинам, среди которых, в частности, могут быть причины организационного характера, погодные условия, в которых оборудование не может устойчиво функционировать, и др. В связи с этим особенно актуально в настоящее время создание надежных, недорогих и достоверных методов определения геометрических параметров крупногабаритных, труднодоступных и особо ответственных объектов.
Одним из способов решения подобной сложной задачи является метод, основанный на использовании фотоизображений объекта. Далее будем называть его фотографическим методом.
1. Анализ аппаратуры для формирования исходных фотоизображений
Фотографический метод основан на компьютерной обработке изображений объектов, полученных с помощью фотоаппаратуры, приспособленной для этих целей. В последние десятилетия широкое распространение получили цифровые измерительные устройства на базе использования ПЗС-матриц или так называемые неметрические цифровые фотокамеры [9]. Такое фотооборудование в сочетании с компьютерной техникой позволяет кардинально изменить возможность обработки фотоснимков для определения пространственного положения и формы строительного объекта. Некоторые типы неметрических камер представлены в табл. 1.
Наличие таких фотокамер, совмещенных с персональным компьютером, и систем, способных работать с растровыми изображениями, какими являются цифровые фотоснимки (Paint, АrchiCAD, Adobe Photoshop CS6 и др.), позволяет разработать некоторые варианты обработки фотоизображений исследуемых объектов для определения параметров их положения и формы. С этой целью объект фотографируется, а его изображение подвергается фотограмметрическим измерениям с помощью стандартного программного обеспечения, предназначенного для работы с растровыми изображениями.
Для фотограмметрических измерений сним- ков может быть использовано современное программное обеспечение, например, одна из цифровых фотограмметрических систем (ЦФС), таких как ERDAS, ENVI, PHOTOMOD. Следует иметь в виду, что фотоснимок должен быть отмасштаби-рован для получения результатов измерений в метрической системе единиц. Это достигается предварительной калибровкой фотоаппаратуры.
При обработке фотоизображения необходимо обеспечить наличие референтной линии, от которой будут производиться все необходимые измерения. Референтной линией называется линия, которая фиксирует на снимке вертикальное направление и по возможности точно совмещена с осью исследуемого объекта.
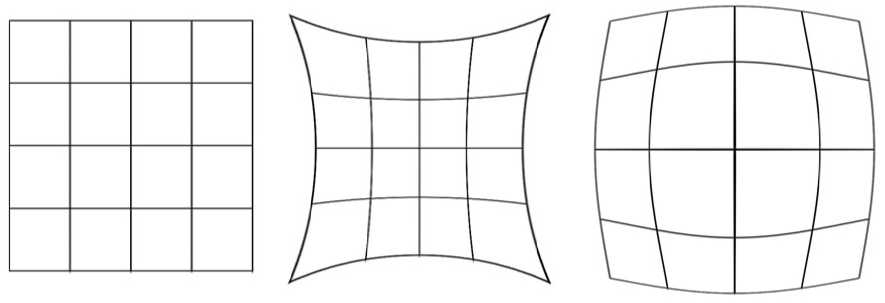
Также необходимо иметь в виду аберрацию (дисторсию) изображения. Сферическая аберрация заключается в том, что световые лучи, исходящие из одной точки объекта и проходящие на разных расстояниях от оптической оси, не фокусируются в одной точке, а формируют ее «размазанное» изображение. Другими словами, изображение, создаваемое параллельным пучком лучей на экране, расположенном перпендикулярно оптической оси, представляет собой пятно с ярким ядром и убывающим по яркости ореолом. Сферическая аберрация может быть существенно снижена комбинацией собирающих и рассеивающих линз. На практике дисторсия проявляется в виде геометрического искажения прямых линий (рис. 1, а). Если прямые на изображении приобрели вогнутую форму – дисторсия называется подушкообразной (рис. 1, б), если выпуклую – дисторсия бочкообразная (рис. 1, в).
Дисторсия полностью определяется применяемым в работе объективом. В сложных оптических системах кривизну поля (дисторсию) исправляют путем сочетания линз с поверхностями раз-
Таблица 1
Характеристики некоторых типов фотоаппаратов
2. Особенности формирования референтной линии
Решение задачи определения геометрических параметров крупногабаритных объектов с использованием фотоизображений включает в себя поиск ответов на самые разнообразные вопросы. Сюда относятся, например, определение расстояния до объекта, определение вертикальности высоко протяженных объектов типа дымовых труб, мачт мобильной связи и др. При этом для определения вертикальности крупногабаритного высокопротя- женного сооружения требуется наличие на фотоснимке изображения вертикальной референтной линии [10,11]. Традиционно в качестве референтной линии используется свободно подвешенный шнур или трос, расположенный перед объективом фотоаппарата, от которого производятся все необходимые измерения (рис. 2). Данный подход является наиболее примитивным и зачастую может привести к возникновению ряда неточностей.
Но в последние несколько лет появились доступные и недорогие программные измерительные системы, которые обеспечивают генерацию референтной линии программным способом [10].
Данные измерительные системы могут функционировать с операционными системами Android
а)
б)
в)
Рис. 1. Дисторсия оптических систем с осевой симметрией:
а – исходное изображение; б – изображение при положительной дисторсии (подушкообразное); в – изображение при отрицательной дисторсии (бочкообразное)

а)
б)
Рис. 2. Установка отвеса перед объективом (а), фотография высотного объекта с отвесом (б)
или iOS для стандартных смартфонов, что позволяет использовать их фотокамеры для проведения бесконтактных измерений не только вертикальных отклонений высоких крупногабаритных объектов, но и замеров геометрических параметров любых объектов. К подобным измерительным средствам относится программа PlumbBob, устанавливаемая через приложения на смартфон, планшет, ноутбук и пр. В процессе фотографирования исследуемого сооружения на снимке всегда есть изображение вертикальной прямой линии (рис. 3). Эту прямую можно с высокой степенью точности использовать в качестве референтной линии, от которой могут выполняться различные измерения. Данная опция программного обеспечения позволяет полностью исключить операцию формирования референтной линии вручную, что существенно снижает трудоемкость всех работ.
3. Влияние положения референтной линии на определение крена дымовых труб
Крен высотных сооружений (градирни, высотные здания, дымовые трубы) представляет серьезную опасность не только для самих сооружений, но и для окружающих территорий и их застроек. Этим обстоятельством обусловлена и основная трудность использования практически всех подходов определения крена подобных сооружений, поскольку застроенность территорий сильно осложняет выбор точек установки измерительного прибора для производства наблюдений с двух или более направлений. Проблема может быть устранена путем применения подходов, использующих фотоизображения исследуемых объектов. В этом случае фотоизображения, полученные с помощью любительских цифровых фотокамер, могут быть обработаны в среде стандартных редакторов изображений для оценки вертикальности высотных сооружений [11, 12].
При использовании данных методов сооружение фотографируется камерой, после чего фотоизображение импортируется в выбранную систему обработки растровых изображений и визуализируется на экране монитора. При этом необходимым условием является наличие вертикальной референтной линии на изображении. Кроме того, учитывая, что результаты измерений должны быть представлены в метрической системе, необходима предварительная калибровка фотокамеры. Калибровка фотокамеры является сложным и ответственным процессом, от результата которого зависит точность и достоверность определения геометрических параметров объекта. Изучению этого процесса посвящены исследования, описанные в работах [9, 13–20].
Что касается формирования на фотоснимке референтной линии, то наиболее простым вариантом является использование шнурового отвеса. Обычно отвес располагается перед объективом фотокамеры таким образом, чтобы на фотоснимке было отчетливо видно его изображение. Положение отвеса относительно исследуемого объекта (например, дымовой трубы) может быть произвольным. Возможные варианты положения отвеса относительно оси трубы показаны на рис. 4.
Под креном трубы будем понимать отклонение верхней части трубы от вертикальной линии (рис. 5) в метрических единицах. Для определения этой величины фотоизображение загружается в редактор растровых изображений. Все существующие редакторы растровых изображений позволяют определять координаты характерных точек растра (рис. 5) в связанной с ним системе координат. Получаемые координаты измеряются в пиксе-
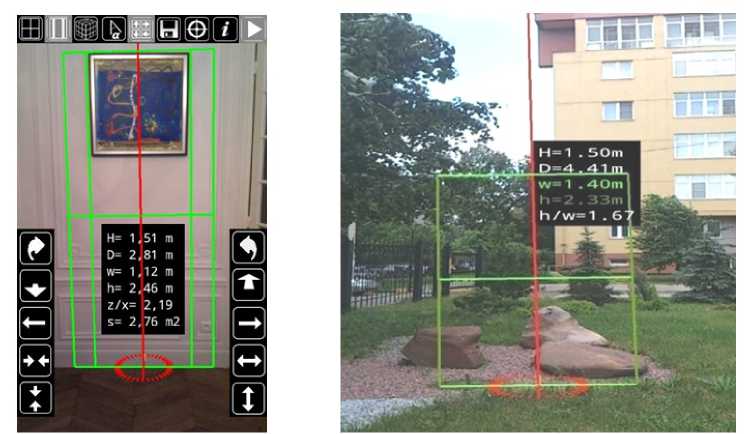
б)
а)
Рис. 3. Интерфейс программы PlumbBob, установленной на ноутбуке (а), и пример реального фотоизображения объекта (б)
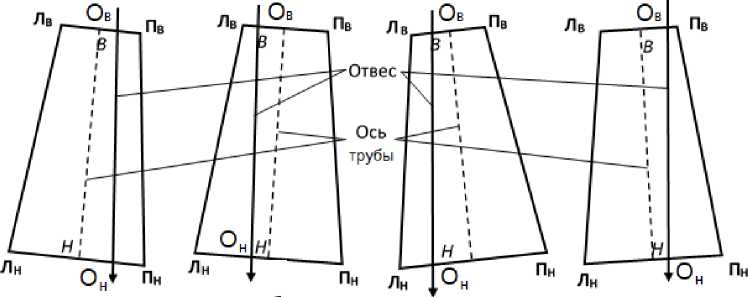
а) б) в) г)
Рис. 4. Схемы к определению крена трубы

Рис. 5. Эталонное расположение отвеса
лах. Предварительная калибровка фотокамеры согласно [9, 18, 19] позволяет установить взаимосвязь между координатами изображения и реальными метрическими координатами, в которых существует объект. Технически замер растровых координат производится путем наведения курсора на характерные точки трубы на уровне верхнего и нижнего ее сечения и последующим определением их растровых координат (в пикселах). Характерными точками являются: точка левого края трубы, точка на отвесе (на соответствующем уровне) и точка правого края. Обозначим эти точки Л, О и П (см. рис. 4).
Отметив указанные точки, вычисляем расстояния ЛВ, ПВ и ЛН, ПН как разность координат точек О–Л и О–П (в пикселах). Далее вычисляем среднее арифметическое расстояние от отвеса до оси трубы на верхнем уровне В = – (Л В + П В )/2 и на нижнем уровне Н = – (Л Н + П Н )/2 (с учетом знаков ЛВ, ПВ и ЛН, ПН).
Крен трубы К вычисляется как разность В и Н с учетом их знаков. Знак означает направление крена. Например, на рис. 4, а, б – крен вправо, а на рис. 4, в, г – крен влево. В метрической системе единиц крен вычисляется по формуле:
K=B⋅δB-H⋅δH, где δВ и δН (мм/пкс) – цена одного пикселя для верхнего и нижнего сечений трубы.
Степень влияния местоположения отвеса на фотоснимке на точность определения крена оценивалась путем проведения специального эксперимента [15], в рамках которого выполнено фото- графирование дымовой трубы высотой 30 м и радиусами: вверху 1,3 м, внизу 2,0 м (рис. 5, 6).
Фотографирование трубы производилось из фиксированной точки неподвижной фотокамерой. В первом варианте эксперимента положение отвеса относительно оси трубы соответствовало центру верхнего сечения (см. рис. 5). В вариантах 2–4 отвес располагался слева от трубы. В вариантах 5–7 отвес располагался справа от трубы (см. рис. 6).
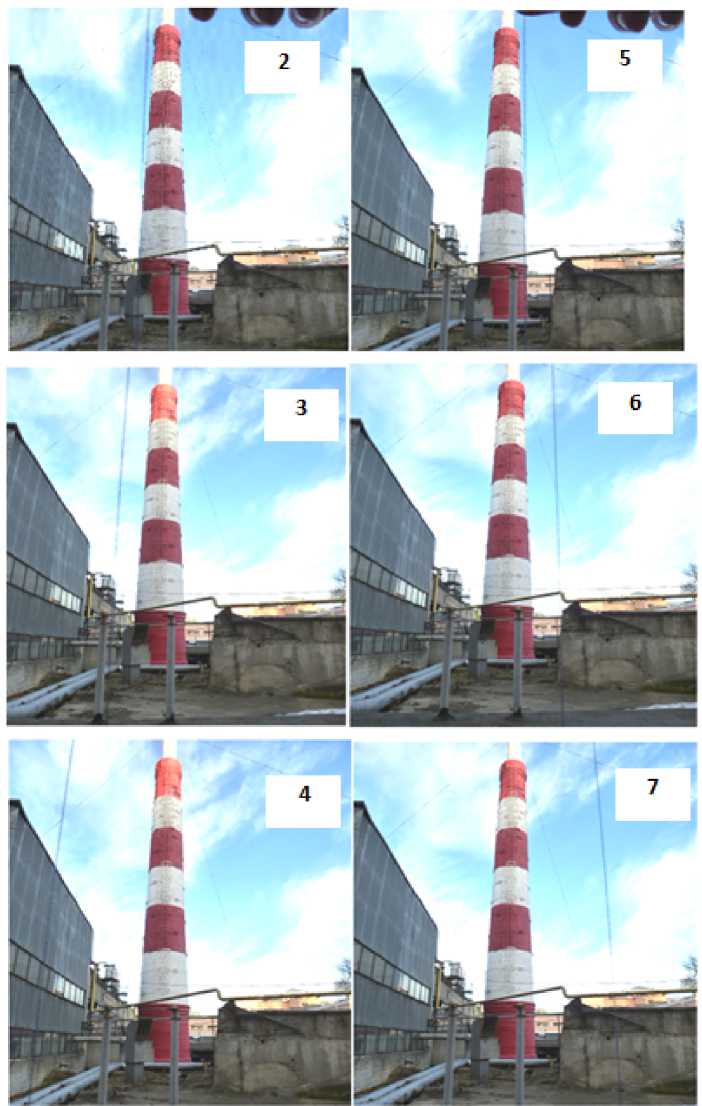
Рис. 6. Варианты расположения отвеса
Фотоснимки получены цифровой камерой Nikon S9100 с условием расположения трубы в центральной части снимка. Первый вариант расположения отвеса (см. рис. 5) использован как эталонный, поскольку расположение отвеса в центральной части фотоизображения в зоне минимального влияния дисторсии исключает появление существенных погрешностей определения крена.
Обработка фотоизображений производилась по вышеописанной схеме. Величины координат (в пикселах) точек Л, О и П приведены в графах 2–7 табл. 2.
Замеренные величины Л В , П В и Л Н , П Н для варианта 1, представленные в графах 8–11 табл. 2, на уровне верхнего сечения очень близки по модулю. Это свидетельствует о том, что в верхнем сечении линия отвеса практически совпадает с осью симметрии трубы. Отклонение составило всего (205+240)/2 – 222 = 0,5 пкс. Величина крена трубы, вычисленная по формуле (1), приведена в графе 12 табл. 2 (в пикселах).
По результатам, представленным в табл. 2, рассчитаны ошибки измерения величины крена. Для расчета использована методика, описанная в работах [11, 12]. Результаты вычисления представлены на рис. 7, где варианты, соответствующие левому и правому положению отвеса, условно совмещены.
Заключение
Анализ результатов измерений крена и величин ошибок показывает, что точность определения крена существенно зависит от положения референтной линии относительно изображения трубы, причем эта зависимость обусловлена расположением отвеса в непосредственной близости от объектива камеры. При этом возрастает влияние дисторсии по направлению к краям фотографического изображения. Другая выявленная особенность заключается в практически симметричном возрастании ошибок измерений при увеличении расстояния референтной линии относительно оси трубы в правом и левом от трубы направлениях.
Таблица 2
Результаты обработки снимков
|
Варианты |
Верхнее сечение, пкс |
Нижнее сечение, пкс |
Верх В , пкс |
Низ Н , пкс |
K , пкс |
||||||
|
Л |
О |
П |
Л |
О |
П |
Лв |
Пв |
Лн |
Пн |
||
|
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
|
1 |
205 |
222 |
240 |
183 |
219 |
250 |
17 |
–18 |
36 |
–31 |
3 |
|
2 |
205 |
194 |
240 |
183 |
183 |
250 |
–11 |
–46 |
0 |
–67 |
–5 |
|
3 |
205 |
171 |
240 |
183 |
150 |
250 |
–34 |
–69 |
–33 |
–100 |
–15 |
|
4 |
205 |
115 |
240 |
183 |
80 |
250 |
–90 |
–125 |
–103 |
–170 |
–29 |
|
5 |
205 |
250 |
240 |
183 |
251 |
250 |
45 |
10 |
68 |
1 |
7 |
|
6 |
205 |
280 |
240 |
183 |
288 |
250 |
75 |
40 |
105 |
38 |
14 |
|
7 |
205 |
307 |
240 |
183 |
328 |
250 |
102 |
67 |
145 |
78 |
27 |
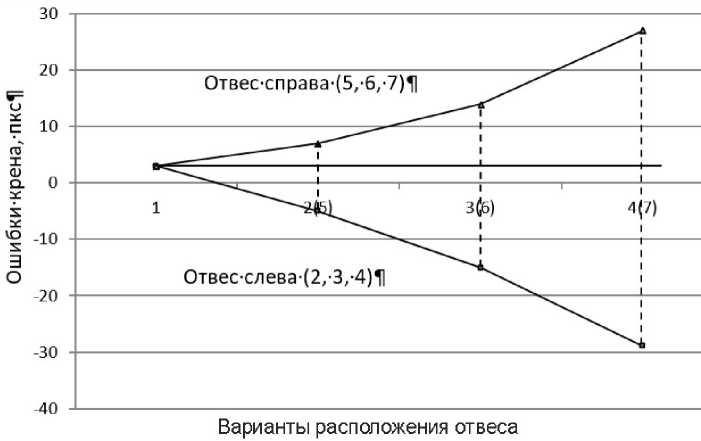
Рис. 7. Ошибки определения крена в зависимости от расположения отвеса относительно оси трубы
Список литературы Использование фотоизображений с целью определения геометрических параметров крупногабаритных объектов
- Попов, Е.В. Контроль качества крупногабаритных изделий с помощью бесконтактных измерений / Е.В. Попов, С.И. Ротков, А.А. Самойлов // Системы проектирования, технологической подготовки производства и управление этапами жизненного цикла промышленного продукта, (CAD/CAM/PDM-2010), Труды международной конференции 19-21 окт. 2010 г. - М., 2010.
- Симакова, Н.А. Информационно-измерительная система контроля формы заготовок крупногабаритных корпусных изделий тяжелого машиностроения: дис. … канд. техн. наук / Н.А. Симакова. - Волгодонск, 2006.
- Ротков, С.И. Методика бесконтактного контроля геометрии крупногабаритных изделий / С.И. Ротков, Е.В. Попов, А.А. Самойлов // Приволжский научный журнал. - 2011. - № 3(19). - С. 34-39.
- Кирилловский, В.К. Оптические измерения / В.К. Кирилловский. - СПбГУ ИТМО, 2004. - Ч. 3.
- Дементьев, В.Е. Современная геодезическая техника и ее применение / В.Е. Дементьев. - М.: Академический проект, 2008.
- Popov, E.V. Fitting a point cloud to a 3D polyhedral surface / E.V. Popov, S.I. Rotkov // ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. XLII-2/W4. 135-140.
- DOI: 10.5194/isprs-archives-XLII-2-W4-135-2017
- Popov, E. Comparison of a Point Cloud to a 3D Surface / E. Popov // GRAPHICON'2016, The Conference Proceedings, Nizhny Novgorod, 2016. -P. 502-505.
- Попов, Е.В. Программа для ЭВМ «Surface Fitting» / Е.В. Попов // Свидетельство о государственной регистрации программы для ЭВМ № 2016661441 от 10.10.2016.
- Калибровка цифровой фотокамеры с целью измерения расстояний / Е.В. Попов, Г.А. Шеховцов, Р.П. Шеховцова, Ю.Н. Раскаткин // Приволжский научный журнал. - 2015. - № 4. - С. 131-140.
- Шеховцов, Г.А. Новые способы формирования и использования вертикальных референтных прямых / Г.А. Шеховцов, Р.П. Шеховцова // Изв. вузов. Сер. «Геодезия и аэрофотосъемка». - 2014. - № 6. - С. 22-27.
- Шеховцов, Г.А. Контроль пространственного положения и формы строительных конструкций с помощью неметрических цифровых камер: монография / Г.А. Шеховцов, О.В. Раскаткина. - Н. Новгород: ННГАСУ, 2017. - 118 с.
- Шеховцов, Г.А. Контроль пространственного положения и формы высоких сооружений: монография / Г.А. Шеховцов. - Н. Новгород: ННГАСУ, 2018. - 214 с.
- Раскаткина, О.В. Методические и классификационные аспекты контроля пространственного положения сооружений башенного типа / О.В. Раскаткина // Третья междунар. науч.-практ. конф «Фундаментальные и прикладные исследования: новое слово в науке», г. Москва, 16 мая 2016 г.: сб. науч. докл. - М., 2016. - С. 58-77.
- Раскаткина, О.В. Современные методы определения параметров пространственного положения и формы строительных конструкций / О.В. Раскаткина, Ю.Н. Раскаткин // Материалы междунар. науч.-практ. конф. «Наука и образование: векторы развития». - Чебоксары, 2016. - С. 272-296.
- Раскаткина, О.В. Об оптимизации фотографического способа контроля вертикальности промышленных дымовых труб / О.В. Раскаткина // Третья междунар. науч.-практ. конф. «Фундаментальные и прикладные исследования: новое слово в науке», г. Москва, 16 мая 2016 г.: сб. науч. докл. - М., 2016. - С. 78-91.
- Раскаткина, О.В. О методике и результатах моделирования бесконтактного фотографического способа измерения расстояний / О.В. Раскаткина // Вестник современных исследований. - 2019. - № 1.3 (28). - С. 163-170.
- Кацарский, И.С. О цифровой фотограмметрии и перспективах ее применения / И.С. Кацарский // Геопрофи. - 2006. - № 6. - С. 4-8.
- Гельман, Р.Н. Лабораторная калибровка камер с большой дисторсией / Р.Н. Гельман, А.Л. Дунц // Геодезия и картография. - 2002. - № 7. - С. 23-31.
- Никишин, Д.А. Методы и результаты калибровки малоформатных цифровых камер с трансфокатором / Д.А. Никишин // Изв. вузов. Сер. «Геодезия и аэрофотосъемка». - 2003. - № 4. - С. 100-107.
- Могильный, С.Г. Конструктивная калибровка цифровой камеры / С.Г. Могильный, А.А. Шоломицкий, А.А. Лунев // Изв. вузов. Сер. «Геодезия и аэрофотосъемка». - 2011. - № 2. - С. 62-66.
