Использование космической тросовой системы для решения задачи доставки груза на орбиту

Автор: Ледков Александр Сергеевич, Жаринов Михей Константинович
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Механика и машиностроение
Статья в выпуске: 6-1 т.15, 2013 года.
Бесплатный доступ
В данной статье рассматривается операция вывода космического аппарата (КА) с помощью радиально-ориентированной космической тросовой системы (КТС), переводимой во вращение. Получена математическая модель, описывающая ее движение для случая круговой орбиты. Построены диаграмма начальных скоростей стыковки и диаграмма разрыва троса позволяющие осуществить выбор условий стыковки обеспечивающих выведение КА на более высокую орбиту.
Космическая тросовая система, диаграмма движения стыковочного модуля, диаграмма разрыва троса
Короткий адрес: https://sciup.org/148202509
IDR: 148202509 | УДК: 629.78;
The use of space tether system to solve the problem of cargo delivery to orbit
In this article we described output operation the spacecraft with radially oriented space tether system. A mathematical model describing its motion for the case of a circular orbit. Built initial velocities diagram and chart docking cable breaking allowing for a choice of conditions to ensure removal of the docking of spacecraft into a higher orbit.
Текст научной статьи Использование космической тросовой системы для решения задачи доставки груза на орбиту
Для доставки груза с поверхности Земли на орбиту традиционно используют ракетоносители. В последние десятилетия активно ведутся работы по созданию альтернативных схем доставки с использованием космических тросовых систем. Их главным достоинством является снижение стоимости операции вывода за счёт отказа от использования последней ступени ракетоносителя. В научной литературе обсуждается несколько методов перевода груза на более высокую орбиту, используя КТС [1]. Самым амбициозным и труднореализуемым проектом является космический лифт, представляющий собой расположенную в экваториальной плоскости космическую тросовую систему, соединяющую поверхность Земли с находящейся за геостационарной орбитой космической станцией. Центробежная сила обеспечивает устойчивость этой конструкции. Груз доставляется на орбиту на движущемся вдоль троса подъемнике [2]. Более реальной является концепция космического эскалатора – постоянно находящейся на орбите радиально ориентированной КТС. Спутник выводится на низкую орбиту, где пристыковывается к нижнему концу эскалатора и перетягивается с помощью специального подъемного механизма по тросу наверх. Там он отстыковывается и продолжает свой полет на более высокой орбите[1]. Другим обсуждаемым в научной литературе способом является использование вращающихся вокруг центра масс КТС. Груз выводится на низкую ор-
биту, где стыкуется с нижним концом КТС. Трос обеспечивает передачу энергии и количества движения от находящегося на орбиту спутника выводимому грузу. После того как груз, совершая вращение в рамках КТС, попадает в высшую точку, происходит расстыковка [3].
В данной статье предлагается рассмотреть комбинированный способ выведения груза на орбиту с помощью переводимой во вращение радиально-ориентированной КТС. До момента стыковки космическая тросовая система находится в радиальном положении. С помощью ракетоносителя на орбиту выводится космический аппарат, который пристыковывается к нижнему концу КТС. После этого КТС выводится из устойчивого радиального положения и переводится во вращение. В наивысшей точке происходит отделение КА. Перевод во вращение может осуществляться за счет реактивных, электродинамических и инерциальных сил, а также за счет управления длиной троса. Достоинством этого способа является простота стыковки, поскольку не нужно синхронизировать вращение КТС и орбитального движения КА, а также отсутствие движущегося по тросу подъемника.
В данной работе рассматривается движение КТС с момента стыковки КА до момента его отделения. Перевод во вращение осуществляется за счет разности скоростей стыковочного модуля и выводимого космического аппарата. Стыковка происходит мгновенно и может рассматриваться, как абсолютно неупругий удар.
Целью работы является исследование возможности доставки груза на орбиту с помощью переводимой во вращение радиально-ориентированной космической тросовой системы; разработка математической модели, описывающую динамику КТС после стыковки с выводимым на орбиту КА; определение условий стыковки, обеспечивающих безопасный вывод груза на более высокую орбиту.
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
[ ES
c = <
l 0
, если10 < 1,
, если10 > 1,
Рассмотрим тросовую систему, которая состоит из несущего спутника массой M с центром масс в точке C , невесомого упругого троса длиной l и стыковочного модуля с прикрепленным к нему грузом массой m . Спутник движется на орбите радиусом r (рис. 1). Предполагаем, что на систему действует только гравитационная сила. Несущий спутник и груз представляются в виде материальных точек. Рассматривается плоское движение системы. Введем жестко связанную с Землей инерциальную систему координат Oxy .
Составим уравнения Лагранжа 2-ого рода. В качестве обобщенных координат выберем параметры r , l , ф и 0, где 0 - угол истинной аномалии, ф - угол между осью Oy и тросом.
Найдём потенциальную энергию системы. Она складывается из потенциальной энергии несущего спутника, стыковочного модуля и энергии упругой деформации троса:
П=-MM - Mm + 1 c ( - ,0)2, (1)
r rr2 + 2 r1 cos(y) +I2 2
где l 0 – длина недеформированного троса; c – жесткость троса; M — гравитационный параметр;
п
Y = - - 0 + ф.
Если трос не натянут ( I < I 0 ) то несущий спутник и стыковочный модуль представляет собой систему из двух свободно движущихся точек. Это явление можно учесть, если рассматривать коэффициент жесткости троса как кусочно-заданную функцию:
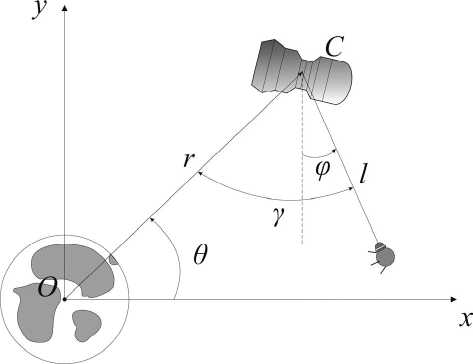
Рис. 1. Космическая тросовая система где E – модуль Юнга, S – площадь поперечного сечения троса.
Найдем кинетическую энергию системы. Она состоит из кинетической энергии несущего спутника и стыковочного модуля.
- 2 r01 sin( Y ) + r 2 + 2 1rф sin( y ) + 1 2 ).
Лагранжиан запишется в виде:
L = T - П.
Перепишем (4) учитывая уравнения (1) и (3):
L = 2 г10Ф cos ( -0 + ф ) + r 2 0 2 + 1 2 ф 2 +
■■ ■
+ 2 r1 cos ( -0 + ф ) - 2 r 0 1 sin ( -0 + ф ) +
GMMz r
+
GmMz
r2 - 2r1 sin(ф + П - 0) +12
- 2 c ( 1 - 1 o )2.
Составим систему уравнений Лагранжа 2-ого рода описывающих движение КТС с упругим невесомым и тонким тросом:
(M + m)(r - r02) + m(1 - 1ф2) cos(y) + +m (21ф + фф) sin( y ) =
MM ^^^^^^^ ^^^^^^^
r2 д/ r2 + 2 r1 cos( y ) + 12
Mm (r + 1 cos( y ))
3,
(r2 + 2 r1 cos( y ) + 12)2
(1ф2 - 1)mr sin(y) + (21
_ цшг] sin(2)
=
( r 2 + 2 r1 cos( Y ) + 1 2)2
m1 (( r - r0 2)sin( Y ) + (20т- + 0r )cos( Y ) + 1ф +
Mmr/ sin( Y )
+21ф)
( r 2 + 2 r1 cos( Y ) + 1 2)2
- m(0r + 20r-) sin( Y ) + m ( r - r0 2) cos( Y ) +
Mm ( r cos( y ) + 1 )
(r2 + 2 r1 cos(Y) + 12)2
^-c(1 -10)-
Полученная система является частным случаем системы приведенной в [4]
Рассмотрим частный случай, когда спутник движется по круговой орбите ( r = const ), тогда уравнения (5) существенно упрощаются. Угол 0 изменяется по закону 0 = rot , где го = V 0Г' и движение КТС описывается уравнениями:
-mrro2I sin(rot - ф) + ml(1ф + 21ф) =
_ ^mrl sm( rot - ф)
= p
(r2 - 2rl cos(rot - ф) +I2)2
m(rro2 cos(rot - ф) +I - 1ф ) =
цт ( r cos( rot - ф ) - I )
~ + C ( I - I 0 ).
(r2 - 2r1 cos(rot - ф) +I2)2
ОПРЕДЕЛЕНИЕ НАЧАЛЬНЫХ УСЛОВИЙ
До момента стыковки КТС совершает стационарное движение. Считая скорости постоянными из (6) получим уравнение, позволяющее определить длину троса 1 * , соответствующую стационарному движению
т ro 2( r - L )^my + C (I» -l0) = 0, (7) (r -1*)2
где т 1 - масса стыковочного модуля. Будем считать, что стыковка происходит мгновенно и представляет собой абсолютно неупругий удар. Скорости КА и стыковочного модуля до и после стыковки связаны соотношением
-
V0(т -m1) + m1ro(r -I) = mVKA, (8)
где V0 - скорость выводимого КА (рис. 2а).
После стыковки (рис. 2б) КТС имеет следующие начальные условия &
фо = 0 , фо = Vs /1*, 1о =1*, 1о = V • (9)
ЧИСЛЕННОЕ МОДЕЛИРОВАНИЕ ОПЕРАЦИИ ВЫВОДА ГРУЗА
Исследуем влияние на начальной скорости КА на возможность вывода КА на более высокую орбиту. Рассмотрим КТС, состоящую из несущего спутника массой M = 6000 кг , стыковочного модуля вместе с выводимым КА общей массой т = 700 кг и троса изготовленного из материала Dyneema длиной 1 0 = 31000 м , модулем Юнга E = 172 ГПа , пределом прочности на разрыв а = 3 ГПа и диаметром d = 1 мм [5]. Вся система двигается по круговой орбите радиусом r = 65 50-103 м . Из уравнения (7) вычислим длину троса в момент стыковки, если масса стыковочного модуля т 1 =150 кг , получаем 1 * = 31004.57 м .
Используя систему уравнений (6) проведем серию численных расчетов с начальными условиями (9), изменяя начальные скорости Vф е [-310,310] , V е [-300,300] . Порезульта-там составим диаграмму (рис. 3), на которой отметим точки, соответствующие успешному выводу. Под успешным выводом будем понимать ситуацию, когда в процессе движения КТС ее фазовая траектория попадает в область, определяемую условиями
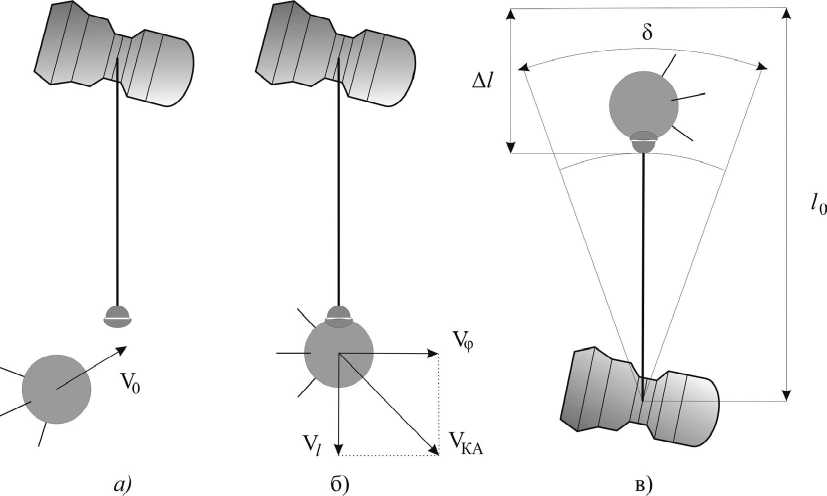
Рис. 2. Стыковка выводимого груза с модулем
Y e [ n - 5 , n + 5 ] , 1 > 1 0 -A 1 . (10) где δ и Δ l – параметры, определяющие требуемую область пространства (Рис. 2в) и в момент расстыковки скорость выводимого груза больше или равна круговой
V КА ≥
GMz r
Приведенная на рис. 3 диаграмма построена для 5 = 3° и A 1 = 100 м .
Белым цветом показаны начальные условия стыковки, при которых условия вывода (10) и (11) не выполняются. Серым точкам соответствуют случаи, когда КТС после стыковки переходит во вращение, что позволяет выводить какой-либо груз на более высокую орбиту. Правая часть диаграммы соответствует начальным условиям, при которых направления угловых скоростей обращения по орбите и закрутки совпадают. В этом случае в наивысшей точке скорости складываются и происходит разгон груза. В левой части наоборот – происходит торможение.
При стыковке с большими скоростями сила натяжения может превысить критическое значение, что приведет к обрыву троса. На рис. 4 показана диаграмма разрыва троса. Области закрашенной белым цветом соответствуют начальные условия, при которых сила натяжения троса во время операции вывода не превышает критического значения Тк,р = ^S . Черными точками показана зона соответствующая разрыву троса.
Таким образом, начальные условия одновременно соответствующие черным (рис. 3) и белым точкам (рис. 4) на соответствующих диаграммах являются точками успешного вывода космического аппарата на более высокую орбиту.
В качестве примера приведем график y ( t ) для некоторых точек (рис. 5).
ЗАКЛЮЧЕНИЕ
В статье рассмотрена операция вывода с помощью переводимой во вращение радиально-ориентированной КТС. Получена математическая модель, описывающая движение КТС. Построена диаграмма начальных скоростей стыковки, которая позволяет судить о возможности вывода КА на более высокую орбиту. А также диаграмма разрыва троса. Полученные диаграммы позволяют осуществить выбор условий стыковки обеспечивающие выведение КА на более высокую орбиту.
Работа выполнена при поддержке Российского фонда фундаментальных исследований (проект №12-01-31114 мол_а).
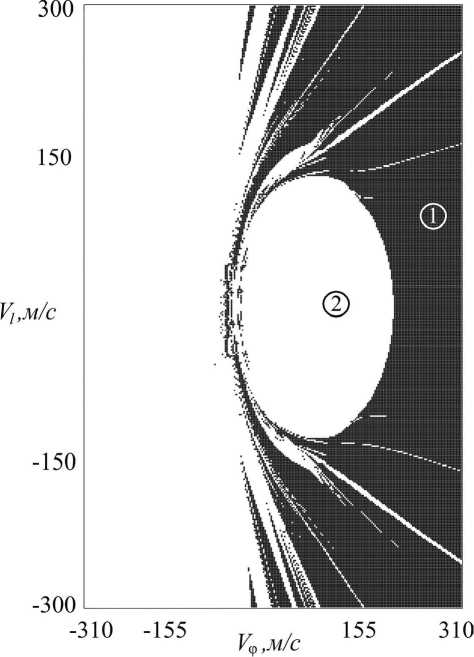
Рис. 3. Диаграмма движения стыковочного модуля
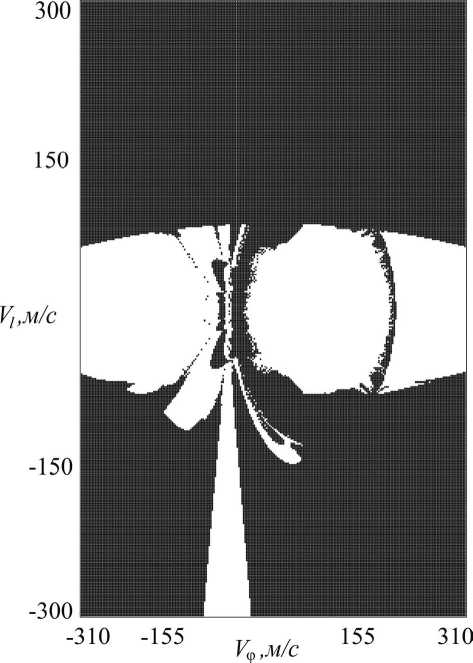
Рис. 4. Диаграмма разрыва троса
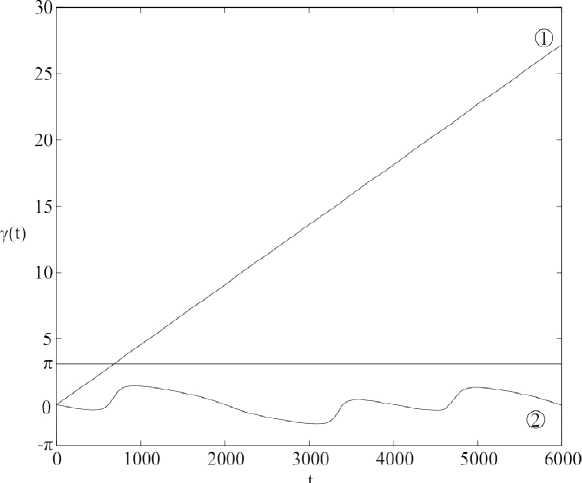
Рис. 5. Графики y ( t ) в двух точках
Список литературы Использование космической тросовой системы для решения задачи доставки груза на орбиту
- Белецкий В.В., Левин Е.М. Динамика космических тросовых систем. М.: Наука, 1990. 336 с.
- Edwards B.C., Design and deployment of a space elevator//Acta Astronautica. 2000. ¹2. З. 785-799, DOI: 10.1016/S0094-5765(00)00111-9
- Hoyt, R.P., Slostad, J.T., Frank, S.S., "A Modular Momentum-Exchange/Electrodynamic-Reboost Tether SystemArchitecture," AIAA Paper 2003-5214, 39th Joint Propulsion Conference, Huntsville, AL, July 2003.
- Асланов, В.С., Влияние упругости орбитальной тросовой системы на колебания спутника//Прикладная математика и механика. 2010. Т.74. №4. С. 582-593.
- Aslanov, V., Ledkov A. Dynamics of the Tethered Satellite Systems. UK, Cambridge: Woodhead Publishing Limited. 356 p.
