Использование метода adaptive threshold в системе технического зрения

Автор: Пелевин Е.Е., Балясный С.В.
Журнал: Juvenis scientia @jscientia
Рубрика: Технические науки
Статья в выпуске: 1, 2017 года.
Бесплатный доступ
В статье поднимается вопрос выделения контуров образов на изображениях в робототехнике и других сферах деятельности. В качестве объекта исследования выступает алгоритм выделения контуров Adaptive Threshold. Данный алгоритм был детально описан, после чего протестирован на различных видах изображений. Данные исследования показали, что этот метод достаточно эффективен для изображений с малой долей зашумления, но с увеличением количества помех возрастает количество неточностей в результирующем изображении. В результате сделан вывод о том, что перед обработкой желательно применять медианную фильтрацию, чтобы снизить уровень шума и тем самым улучшить результаты работы алгоритма. Установлено, что алгоритм является достаточно универсальным и подходит для обработки широкого спектра изображений.
Контур, выделение, бинаризация, адаптивный порог, область применения алгоритма, робототехника, система технического зрения (стз), распознавание образов, выделение границ объекта
Короткий адрес: https://sciup.org/14110148
IDR: 14110148 | УДК: 004.932.72''1 | DOI: 10.15643/jscientia.2017.1.001
The usage of adaptive threshold method in the system of computer vision
The article touches upon the question of the edge detection of digital images in robotics and other fields. The algorithm of the edge detection called ‘Adaptive Threshold’ serves as the subject matter of the research. This algorithm has been described in details and then, tested on different types of images. The results of the research done have shown that this method is efficient enough for images with small amount of noise reduction. However, the quantity of fidelity in a resulting image decreases with the increasing amount of noise. The study has concluded that before processing it is preferably to employ the median filtering to reduce the noise level and thus, to improve the algorithm output. It has been found that the algorithm is rather universal and is suitable for processing a wide range of images.
Текст научной статьи Использование метода adaptive threshold в системе технического зрения
В настоящее время практически во всех сферах деятельности человека проходит глобальная информатизация, что накладывает свой отпечаток на устоявшиеся бизнес процессы и технологии. В подавляющем большинстве случаев такие нововведения позволяют добиться повышения эффективности работы той или иной компании, производства. Подобные изменения коснулись и производственных линий, автоматизация которых возможна с использованием роботизированного оборудования, неотъемлемой частью которого является система технического зрения (СТЗ). Основой этой системы является эффективный алгоритм определения контуров изображений.
Учеными из разных стран разработано большое количество различных алгоритмов, которые позволяют решить проблему обнаружения границ образов. У каждого из них есть положительные и отрицательные стороны. В современных же реалиях больше всего востребованы алгоритмы, являющиеся наиболее универсальными. Одним из них является метод Adaptive Threshold. Благодаря адаптивному подходу к расчету порога яркости пикселя, этот метод позволяет наиболее гибко подходить к выделению тех групп точек, которые находятся именно на границе образа.
Для того чтобы понять принцип работы данного метода, необходимо рассмотреть его математическое описание.
Пусть I ( x , y ) представляет собой исходное изображение, которое будет использоваться для адаптивной пороговой обработки. G ( x , y ) – это нормализованное значение градиента изображения I ( x , y ), которое рассчитывается по формуле:
, Vl(x,y\
6(^m^H (1)
Данный метод отличается от других тем, что использует адаптивный порог ( T ( x ; y )) для каждого пикселя исходного изображения. Исходя из этого, получим следующую формулу для бинаризации изображения [2, с. 469]:
1,если/(х,у)>7(х,у) О,если /(х,у)<Г(х,у)
В данном случае I(x,y) и T(x,y) являются двумерными поверхностями (2D), которые пересекаются в позиции c={(x,y)| I(x,y)=T(x,y)} [2, с. 469] опираясь на полученное выражение следует считать, что с будет находиться в тех местах, где находится граница образа на исходном изображении. Это означает, что раз T(x,y) – правильная пороговая поверхность, то значение ∫сG(x,y)dH1(x,y)/C (где H является хаусдорфовой мерой для C, а C – количество граничных точек объекта) будет максимальным. Данный факт позволяет преобразовать функцию T к функциональному простран- ству Ω по следующей формуле:
min Г/^с/нЧ^й/С
Ml J X 1 V '
где, F(T) – это первая производная от T и F(T^ = -G(x,y\(x,y^ec [2, с. 469]. Эта объектная функция достаточно сложная. Чтобы упростить ее, необходимо вы- делить регуляризацию в отдельную функцию. В этом случае изначальная функция примет вид:
где, λ – параметр регуляризации. Дальнейшая мини-
мизация выражения (4) сводится к решению следующего уравнения Пуассона:
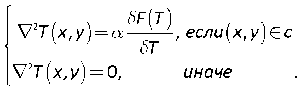
В данном выражении α=1/2 λ . Поскольку F ( T ) касается c , то F ( T ) может быть записан как F ( x ( T ), y ( T )) по правилу цепи:
Данный алгоритм работает достаточно просто. На входе поступает исходное изображение (
I
). Объявляются два цикла, вложенные друг в друга, счетчики которых перебирают все значения по ширине (
x=0; x
Благодаря особенностям этот метод может применяться для реализации СТЗ в робототехнике, для обнаружения деталей на конвейерных линиях, при выделении контуров изображений на аэро и космических снимках. Такая универсальность позволяет выделять границы образов даже на сильно загруженных изображениях, при этом границы отдельных объектов остаются точными и полными.
Для оценки универсальности работы рассматриваемого метода была сделана выборка изображений с различными
6T ' 6T v 6T
6T dx
6T dy
Обращаем внимание на то, что здесь T – функция, δT –
измененная мы имеем:
функция T и δT=dI-dT [2, с. 470]. Таким образом,
показателями, а также различным количеством длинных и коротких границ, количеством шума и степенью затененности. Первое из рассматриваемых изображений содержит множество небольших по размеру объектов. В результате на изображении присутствует большое количество границ (рис. 2).
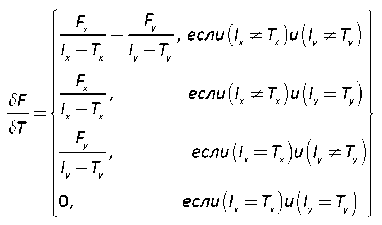
Данное выражение позволяет рассчитать пороговое
значение яркости для бинаризации каждого пикселя, что делает алгоритм применимым для большего числа различных изображений [2, с. 470].
Если обобщить математическое описание нахождения порогового значения, то общий алгоритм работы метода можно изобразить в виде блок-схемы (рис.1):
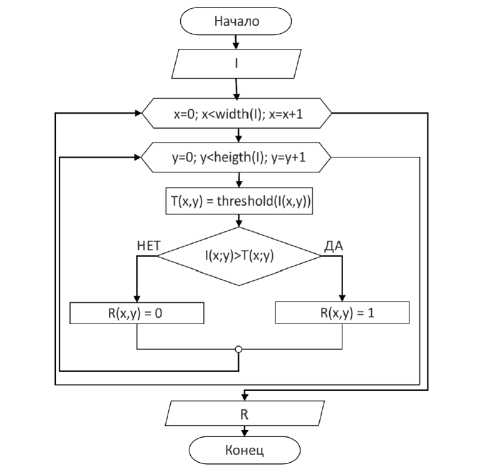
Рис. 1. Алгоритм работы метода Adaptive Threshold

Рис. 2. Исходное изображение с большим количеством границ и мелких деталей
Обработка подобных образов является достаточно сложной. Несмотря на это, после обработки данного изображения алгоритмом Adaptive Threshold были получены следующие результаты (рис.3).
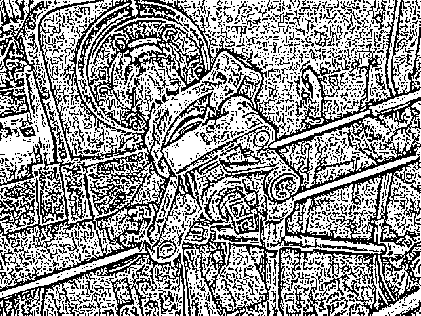
Рис. 3. Результат обработки первого исходного изображения
После обработки на первом тестовом изображении видны границы даже мелких деталей, несмотря на это присут- ствует большое количество ненужных артефактов, которые образовались из-за наличия шероховатости поверхностей. Эти погрешности имеют незамкнутые контура, что позволит впоследствии убрать их с изображения.
Во втором случае имеется контрастный фон, но при этом имеется большое количество тонких и коротких граней, что заметно усложняет процесс обнаружения (рис. 4).

Рис. 4. Исходное изображение с высоким контрастом и большим числом тонких граней
После обработки этого изображения были получены следующие результаты (рис.5).
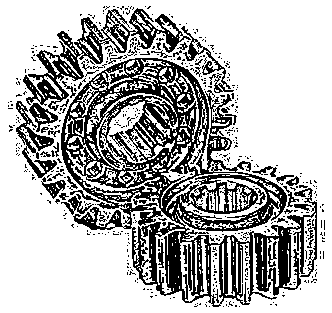
Рис. 5. Результат обработки контрастного изображения с большим количеством узких граней
Несмотря на ореол вокруг образа, связанного с наличием шума на исходном изображении, в результате были выделены контуры каждого зубца шестерней, как внутренних, так и наружных.
Ниже представлено последнее изображение, наиболее подходящее для выделения контуров. Деталь контрастна на фоне, что делает контур наиболее четким (рис. 6).

Рис. 6. Исходное изображение с минимальным количеством помех и искажений
В результате обработки данного изображения были выделены грани деталей, а также небольшие дефекты на ее поверхности (рис. 7). Такие результаты были достигнуты за счет отсутствия дефектов исходного изображения.
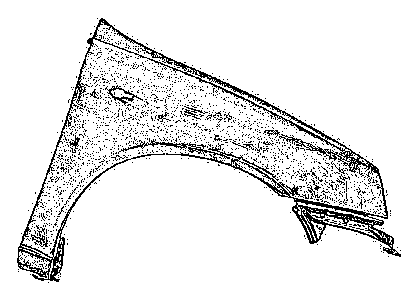
Рис. 7. Результаты обработки изображения, на котором присутствует минимальное количество дефектов
Основываясь на полученных результатах обработки последнего изображения, можно провести два эксперимента. Для первого из них добавим на исходное изображение большое количество шума, которое будет подчиняться нормальному распределению (рис.8).

Рис. 8. Исходное изображение с большим количеством шума
В результате обработки было получено изображение со слабо отличимыми контурами, что неудовлетворительно с точки зрения распознавания образов (рис.9).
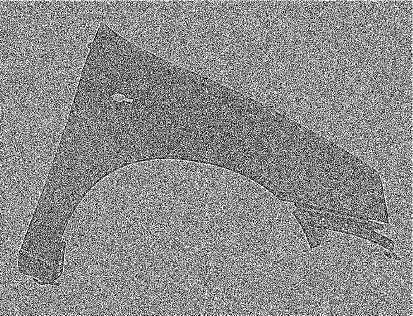
Рис. 9. Результат обработки сильно зашумленного изображения
Для проведения второго эксперимента требуется затенить изображение, чтобы получить менее контрастный фон (рис. 10).
После всех проведенных испытаний, можно считать, что данный результат обработки является наилучшим (рис. 11). Такого эффекта удалось достичь за счет перекрытия тенью большого числа таких искажений, как шум. В результате чего адаптивный порог мог рассчитываться более точно и

Рис. 10. Исходное изображение с большой степенью затененности
Рис. 11. Результат обработки затененного изображения
акцентироваться именно на границах образа, что и дало такое высокое качество выделения.
Из полученных результатов работы алгоритма можно сделать вывод, что алгоритм является чувствительным к наличию шума на исходном изображении, поэтому предварительно нужно выполнять корректирующие алгоритмы, например, медианную фильтрацию, что существенно снизит количество нежелательных артефактов. Анализируя исходные изображения и результаты, можно также заметить, что наилучший результат достигается для тех изображений, на которых объекты расположены на однотонном фоне, что позволяет алгоритму точнее определить пороговое значение для бинаризации. Дополнительной положительной стронной является то, что на работу алгоритма не влияет затененность, а в некоторых случаях она даже способствует получению лучшего результата. Несмотря на указанные незначительные недостатки, метод Adaptive Threshold является достаточно гибким инструментом для выделения контуров образов на цифровых изображениях и может довольно успешно применяться в системах автоматизации, робототехники и других отраслях, требующих идентификации объектов.
Список литературы Использование метода adaptive threshold в системе технического зрения
- Chow C.K., Kaneko T. Automatic boundary detection of the left-ventricle from cineangiograms//Comput. Biomed. Res.,vol. 5, 1972, Pp. 388-410.
- Francis H.Y., Chan F.K., Lam, Hui Zhu Adaptive Thresholding by Variational Method//IEEE Transactions on Image Processing, vol. 7, No. 3, March 1998, Pp. 468-473.
- Haralick R.M., Shapiro L.G. Image segmentation techniques//Comput. Vis., Graph., Image Process., vol. 29, 1985, Pp. 100-132.
- Jain R., Kasturi R., Schunk B.G. Machine Vision. New York: McGraw-Hill, 1995, Pp. 50-56.
- Grimson W.E.L. An implementation of a computational theory of visual surface interpolation//Comput. Vis., Graph., Image Process., vol. 22, 1983, Pp. 39-69.
