Использование метода электрогидавлической аналогии для моделирования работы адаптивной бурильной машины

Автор: Лемешко М.А., Волков Р.Ю.
Журнал: Технико-технологические проблемы сервиса @ttps
Рубрика: Методические основы совершенствования проектирования и производства технических систем
Статья в выпуске: 3 (29), 2014 года.
Бесплатный доступ
В статье рассмотрены вопросы оптимизации адаптивного процесса бурения методом моделирования работы бурильной машины. Изложен новый метод моделирования работы гидропривода бурильной машины на основе электрогидравлической аналогии. Приведены сведения о некоторых результатах исследований адаптивного процесса бурения.
Вращательное бурение, моделирование процесса бурения, электрогидравлическая аналогия, оптимизация процесса бурения
Короткий адрес: https://sciup.org/148186181
IDR: 148186181 | УДК: 622.23.05
The use of the method electrohydraulically analogy for simulation of adaptive drilling machines
In the article the questions of optimization of adaptive drilling process method for simulating drilling machines. Set forth a new method of simulating the operation of the hydraulic drilling machine is based on an electro-hydraulic analogy. Provides information about some of the results of studies of adaptive drilling process.
Текст научной статьи Использование метода электрогидавлической аналогии для моделирования работы адаптивной бурильной машины
Для различных задач при строительстве, в геологии, горном деле, при проходке туннелей и путепроводов, при бурении скважин используются бурильные машины. Одними из наиболее распространенных типов таких машин - являются машины вращательного действия. Эффективность эксплуатации этих бурильных машин зависит от соответствия режимов их работы условиям эксплуатации. К таким условиям относятся: однородность буримого материала, его прочность и вязкость, наличие включений, глубина бурения, износ режущего инструмента (коронки) и др. В процессе бурения эти условия непредсказуемым образом меняются и для поддержания наиболее рациональных режимов бурения необходимо адекватно регулировать привод бурильной машины. Бурение обеспечивается двумя связанными через процесс технологическими движениями, вращением буровой штанги и её подачей в направлении бурения. Соотношение и величина этих параметров должны быть регулируемыми.
При этом основным принципом управления процессом бурения является обеспечение рациональных режимов работы бурильной машины, адекватно изменениям условий бурения в пределах силовых, мощностных и динамических ограничений.
Сложность решения задачи по оптимальному управлению режимами работы бурильной машины связана с необходимостью изменять режимы бурения в соответствие с изменением физико-механических свойства буримого материала и с учетом износа режущей части. Одним из направлений автоматического управления процессом бурения является использование машин имеющих, так называемую адаптивную структуру [1]. Особенностью таких машин является то, что регулирование в них осуществляется через силомоментные обратные связи, без применения специальных средств автоматического управления [2].
Идея создания самонастраивающихся (адаптивных) бурильных машин к изменяющимся условиям функционирования была разработана учеными ЮРГТУ (НПИ) профессорами Дровниковым А.Н. и Водяником М.Г.[3 ].
Структурно такие машины организованы в виде связанных двух дифференциалов [4]. Теоретические и экспериментальные исследования показали эффективность применения бурильных машин с электро-механическими и гидромеханическими дифференциалами.
Управление режимами бурения включает изменение частоты вращения штанги n t и изменение усилия подачи F t , которые должны быть приближены к теоретически оптимальным n p и F p [5] и находиться в пределах прочностных и технологических ограничений [6].
Ряд новых исследований дополнили и углубили принципы адаптации для процесса бурения.
Разработан и изготовлен стенд для экспериментальных исследований адаптивной бурильной машины [7]. Проведена серия испытаний новой бурильной машины, имеющей адаптивную структуру, при которых установлена возможность настройки системы привода на рациональные режимы работы [8].
Разработана математическая модель процесса формирования нагрузки на гидродвигатель вращения и гидроцилиндр подачи для обеспечения режимов работы, близких к оптимальным [9].
Исследованы вопросы динамики при увеличенных нагрузках на бурильную маши-ну[10].
Однако не все вопросы по оптимизации процесса бурения адаптивными бурильными машинами решены.
Для анализа адаптивного процесс взаимодействия привода и буримого материала рационально использовать моделирование процесса бурения, в котором будут промоделированы взаимосвязь параметров, режимы бурения в соответствие с различными настройками системы адаптивного управления. В гидравлике известен метод электрогидравлических аналогий, используемый для анализа разветвленных гидролиний. Для гидросхемы, включающей два связанных дифференциала, этот метод применен впервые. В качестве базовой бурильной машины для моделирования используется адаптивная бурильная машина «УБГ-1А» [11], структура которой включает два гидравлических дифференциала.
Гидравлическая схема такой машины приведена на рисунке 1а.
Первый дифференциал образуют - магистраль гидронасоса (ГН), дроссель (ДР 1 ) и магистраль гидродвигателя (ГД).
Очевидно, что расходы этих устройств связаны выражением:
Q ГН = Q Др1 +Q ГД .
Второй дифференциал образует гидроцилиндр подачи ГЦ.
Уравнение этого дифференциала:
F t = = F пп - F шп , где: F t – усилие подачи штанги в скважину (усилие подачи); F пп – усилие, развиваемое давлением в поршневой полости гидроцилиндра; F шп – усилие, определяемое давлением в штоковой полости гидроцилиндра ;
Схемы на рис.1а и на рис.1б -идентичны. На рис. 1б схема гидропривода адаптивной машины представлена в виде моста, в диагонали которого размещен реверсируемый гидроцилиндр подачи. Такое представление гидросхемы бурильной машины позволяет визуализировать два дифференциала и «мостовой» характер включения гидроэлементов. Как видно, гидроцилиндр размещен в диагонали моста.
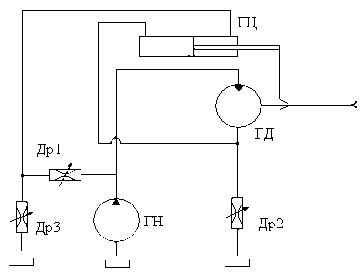
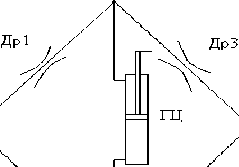
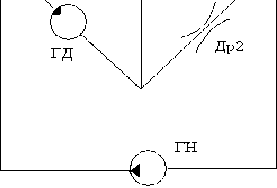
Рисунок 1 – Схемы гидравлической адаптивной бурильной машины :а) типовая форма гидросхемы бурильной машины; б) представление гидросхемы бурильной машины в виде «моста»; ГН – гидронасос, ГД – гидродвигатель, ГЦ –гидроцилиндр, ДР1, ДР2, ДР3 – дроссели настройки на рабочие режимы.
Величина усилия подачи и направление движение штока гидроцилиндра определяются разницей давлений в его поршневой и штоковой полости, которые в свою очередь зависят от сопротивления (момента вращения) гидродвигателя и гидросопротивления настроечного дросселя ДР1.
Целью моделирования является определение связи между настройками дросселей, нагрузками гидродвигателя вращения и силового цилиндра.
Для анализа мостовых схем в электротехнике применяются уравнения Кирхгоффа, которые позволяют найти связи между токами в цепях и напряжениями на сопротивлениях, при различных значениях сопротивлений.
Преобразуем схему на рис.1б в схему удобную для анализа связей, заменим сопротивления гидрдросселей, гидроцилиндра, гидродвигателя сопротивлениями на электросхеме. Напряжение между двумя точками на электросхеме – это аналог разности давления между точками в гидросистеме.
Обозначим токи в ветвях, составим расчетные уравнения контурных токов и далее уравнения для расчета токов в ветвях цепи.
го соответствия гидросопротивления в гидрав-
лических линиях и омического сопротивления в электроцепи. Безусловно, это несоответствие
несколько искажает качественную картину свя-
зей потока и гидросопротивления, однако как
показали эксперименты в некотором диапазоне
исследований это различие малозначимо.
Составляем уравнения для контурных токов:
1 1 ( R i + R 3 ) - 1 2 R i
—
1 3 R 3 = e ;
—
1 1 R i + 1 2( R i + R 5 + R 0 ) — 1 3 R 5 — 0;
—
I 1 R 3
—
1 2 R 5 + 1 3 ( R 2 + R 3 + R 5 ) — 0.
Используем матрицы
значения контурных токов:
( R + R 3
—
R 1
R 1
для вычисления
F 0 ( R 0 )=
—
R 1
—
R 3
A
A
—
R 3
( E
F 1 ( R 0 )=
A
+ R 3 + R 0
R 1
—
R 5
;
—
R 5
—
R 1
+ R 3 + R 0
—
R 5
R 2 + R 3 + R 5 J
—
R 3
—
R 5
R 2 + R 3
A
;
+ R 5 J
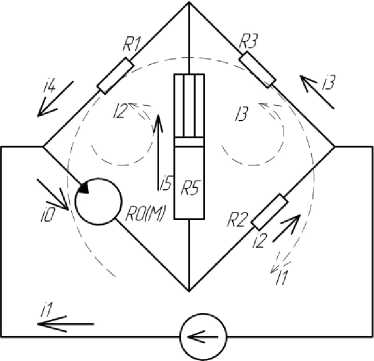
Рисунок 2 – Расчетная схема бурильной машины, преобразованная в электросхему
F 2 ( R 0 )=
( R + R 3
E 1
—
R 3
A
—
R 1
—
R 5
;
A
—
R 3
R 2 + R 3 + R 5 J
F 3 ( R 0 )=
( R + R 3
—
R 1
E )
—
R 1
R 1
+ R 3 + R 0
.
A
—
R 3
—
R 5
Зная контурные токи, рассчитываются
токи в каждой ветви мостовой схемы, а также
При этом приняты следующие обозначения: гидросопротивление дросселя / сопротивление электрической цепи: Др 1 / R 1 , Др 2 / R 2 , Др 3 / R 3 , гидросопротивление гидродвигателя (связанное с моментом сопротивления вращению) обозначено R 0 ; сопротивление гидроци-линдра(усилие развиваемое гидроцилиндром) обозначено R 5 ,давление гидронасосаобозначено Е ( э.д.с. цепей).
При выборе метода электрогидравличе-ских аналогий, и принимая решение об использовании расчета гидролиний с использованием законов Кирхгоффа, изучался вопрос не полно-
напряжения на каждом сопротивлении:
По аналогии: ток в электроцепи ( i ) аналогичен потоку в гидроцепи (Q), напряжение на сопротивлении - эквивалентно разности давлений, между входом и выходом на гидроэлементе. Связь между моментом сопротивления вращению, усилием подачи со значениями давления и расхода в гидроцепях бурильной машины моделировались на основе вышеприведенных уравнений в среде Mathcad.
Используя полученные связи, выполнен анализ работы адаптивной бурильной машины в различных режимах.
На рисунке 3 приведен пример анализ влияния на характеристики управления одного из наиболее важного в схеме дросселя «Др1» – являющегося «плечом» первого гидравлическо-
го дифференциала. Величина проходного сечения этого дросселя определяет степень чувствительности схемы адаптации. Приведены зависимости потоков, от момента сопротивления вращению во всех ветвях гидросхемы.
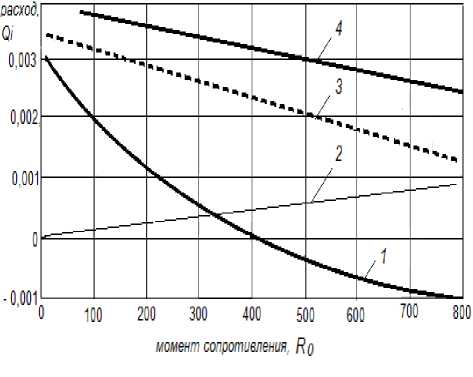
Рисунок 3 – Зависимость расходов в ветвях от момента сопротивления вращению. Расходы через гидроэлементы:1 – R5, 2 – R2, 3 – R1, 4 – R0
Обратим внимание на изменение потока (расхода гидрожидкости) через гидроцилиндр (на схеме рис.3 - Др5, что соответствует в аналогии -R 5 ).
Как видно, с увеличением момента сопротивления вращению расход через гидроцилиндр уменьшается. При значении момента сопротивления вращению в 400 единиц подача буровой штанги на забой прекращается, а в случае дальнейшего увеличения момента сопротивления вращению, осуществляется реверс движения (расход отрицателен).
Выводы
-
1. Модель составленная с использование электрогидравлической аналогии позволяет качественно исследовать особенности включения элементов гидросхемы адаптивной бурильной машины.
-
2. При моделировании нагрузки на гидродвигатель вращения, модельно подтверждается автоматическое изменение усилия подачи. Эти обеспечивает приближение режимов работы бурильной машины к оптимальным.
