Использование спутниковых радионавигационных систем при исследованиях технического состояния объектов электроэнергетики

Автор: Алешечкин Андрей Михайлович, Макаренко Григорий Константинович, Кокорин Владимир Иванович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 2 (35), 2011 года.
Бесплатный доступ
Предложены технические средства диагностики состояния воздушных линий электропередач любого класса напряжения, основанные на использовании технологий определения координат и угловой пространственной ориентации объектов, предоставляемых спутниковыми радионавигационными системами ГЛОНАСС и GPS, а также современных тепловизионных приборов для локализации мест перегрева линий электропередач.
Воздушная линия электропередач, тепловизор, навигация, глонасс
Короткий адрес: https://sciup.org/148176532
IDR: 148176532 | УДК: 528.8.041.3
Use of satellite radio navigating systems at researches of technical condition of electric power industry objects
In the article we consider mobile means for diagnostics of conditions of EHV power lines of any voltage class, based on object position and angular orientation determination technologies, given by GLONASS and GPS satellite radionavigational systems, and also using modern infrared video devices for localization the overheated points on overhead power lines.
Текст научной статьи Использование спутниковых радионавигационных систем при исследованиях технического состояния объектов электроэнергетики
В России общая протяженность магистральных воздушных линий (ВЛ) электропередач составляет более 120 тыс. км [1]. На протяжении всего срока службы ВЛ подвергаются негативным воздействиям окружающей среды, приводящим к их износу и появлению риска повреждений. В связи с этим в процессе эксплуатации ВЛ требуется диагностировать и устранять возникающие в них повреждения, что сопряжено с необходимостью точного определения координат мест таких повреждений.
В настоящее время диагностика состояния ВЛ осуществляется традиционной системой профилактического обслуживания, основанной на очередных и внеочередных обходах и визуальных осмотрах. Облеты ВЛ на вертолетах типа «МИ-2» или «МИ-8» в значительной мере облегчают осмотр труднодоступных участков ВЛ, но они проводятся вручную. Как правило, облеты ВЛ проводит бригада обслуживающего персонала. Каждый член бригады проводит осмотр «своих» элементов ВЛ при помощи бинокля с высоты бреющего полета (100–150 м от поверхности земли) и старается успеть заполнять дефектную ведомость. Выполнить это весьма непросто, так как крейсерская скорость полета вертолета составляет 100–120 км/ч.
Таким образом, недостатками традиционной системы профилактического обслуживания являются низкая оперативность, низкая точность координат мест выявленных аварийных и предаварийных состояний энергетических объектов, большая трудоемкость, повышенная опасность проведения работ.
Выполнять задачу диагностики состояния и определения места повреждения линий электропередач и других объектов электроэнергетики способны средства тепловизионного обследования [2], позволяющие без вывода оборудования из работы выявлять дефекты на ранней стадии их развития и проводить соответствующие предупредительные ремонты. Это минимизирует возможность преждевременного выхода оборудования из строя, а также снижает вероятность аварийных отказов [3].
Для решения поставленной задачи диагностики предлагается мобильный комплекс исследования состояния энергетических объектов (см. рисунок), в состав которого входят следующие технические средства:
-
1. Аппаратура подвижного объекта, размещаемая, например, на борту летательного аппарата (ЛА), для решения задач диагностики и поиска мест повреждения энергетических объектов, в том числе ВЛ:
– навигационная аппаратура потребителей (НАП), например, типа МРК-32 [4], обеспечивающая определение координат, скорости движения и пространственной ориентации диагностического летательного аппарата по радиосигналам космических аппаратов (КА) глобальных навигационных спутниковых систем (ГНСС) ГЛОНАСС / GPS;
– тепловизор типа TH7102 NEC, позволяющий решать задачи обнаружения и анализа неоднородностей температурного поля энергетических объектов, выделяя участки, характеризующиеся повышенной температурой по отношению к заданным температурным пределам;
– измеритель вектора напряженности (ИВН) электромагнитного поля ВЛ, на базе показаний которого осуществляется измерение расстояния до линии и выдача предупреждений пилоту о недопустимом сокращении расстояния от ВЛ до ЛА;
– вычислительный блок, обеспечивающий совместную обработку и накопление массивов измерительной информации тепловизора, аппаратуры МРК-32 и ИВН с целью решения оперативных задач и последующего анализа результатов диагностики.
-
2. Аппаратура контрольно-корректирующей станции (ККС) для реализации дифференциального режима определения координат подвижного объекта и координат места повреждения:
– НАП ГНСС ГЛОНАСС/GPS, осуществляющая измерения радионавигационных параметров в точке расположения ККС, координаты которой известны с геодезической точностью;
– формирователь корректирующей информации (КИ), обеспечивающий определение поправок к значениям измеренных НАП ККС радионавигационных параметров в соответствии с выражением [5]
Δ ri = r КСэ i - r % КС i , (1)
где i = 1,…, n – текущий номер принимаемого КА; n – общее число КА, принимаемых НАП ГНСС; r % КС i – псевдодальности, измеренные ККС; r КСэ i – эталонные псевдодальности для ККС, рассчитанные исходя из известных координат ККС и эфемерид наблюдаемых навигационных спутников; Δ ri – поправки к измеренным псевдодальностям, передаваемые по радиоканалу на борт диагностического ЛА;
– передатчик КИ, обеспечивающий передачу поправок к значениям радионавигационных параметров на подвижный объект в соответствии с международным стандартом передачи корректирующей информации RTCM SC-104 [6].
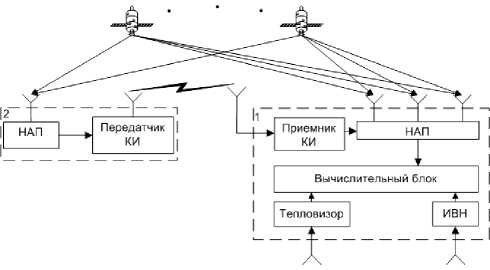
Мобильный комплекс исследования состояния энергетических объектов
Тепловизор используется для формирования высококачественного тепловизионного изображения исследуемого объекта в диапазоне фокусирования от 50 см до бесконечности. Комбинация угла обзора и расстояния до измеряемого объекта определяет площадь или участок объекта, полностью охватываемый объективом тепловизора. Зависимость размеров объекта, проецируемого на один пиксель матрицы тепловизора, от расстояния до измеряемого объекта имеет вид
D ■ tg I -гор 1 2
I 2 )
A =-------—,
а
D ■ tg f “ вер ) 2
I 2 )
B =------^
b
где А , B – высота и ширина объекта, проецируемого на один пиксель матрицы тепловизора, соответственно; D - расстояние до измеряемого объекта; а гор, а вер - горизонтальный и вертикальный углы обзора поля зрения тепловизора соответственно; a , b – число элементов в строках и столбцах микроболометриче-ской матрицы тепловизора.
Наименьшие расстояния по вертикали от проводов ВЛ до поверхности земли в населенной местности для линий различных классов напряжений (см. Правила устройства электроустановок ПУЭ. 7-е изд. Гл. 2.5), а также параметры А и B из формул (2) при а гор = 29°, а вер = 22°, a = 320, b = 240, соответствующие характеристикам тепловизора TH7102, приведены в табл. 1.
Таким образом, разрешающая способность тепловизора TH7102 NEC как технического средства диагностики является достаточной для условий измерений, приведенных в табл. 1.
Предотвращение приближения на недопустимое расстояние к ВЛ электропередач может осуществляться путем анализа принимаемых электромагнитных колебаний, излучаемых проводами ВЛ ИВН электромагнитного поля [7].
Таблица 1
Разрешение тепловизора
|
Величина |
Класс напряжения ВЛ, кВ |
||||
|
35 |
110 |
150 |
220 |
330 |
|
|
Наименьшее расстояние до измеряемого объекта D , м |
7 |
7,5 |
8 |
||
|
A , см |
1,13 |
1,21 |
1,29 |
||
|
B , см |
1,13 |
1,21 |
1,30 |
||
Для определения географических координат тепловизионного изображения обследуемого объекта необходимо решить задачу получения информации о местоположении и пространственной ориентации диагностического ЛА. Для решения данной проблемы используется аппаратура НАП ГНСС.
В качестве угломерной НАП предлагается использовать МРК-32 [4]. Данная аппаратура обеспечивает прием и обработку информации ГНСС ГЛОНАСС и GPS для определения координат места и параметров пространственной ориентации (курс, тангаж, крен) с погрешностью 0,1°–0,3°. В состав одного комплекта аппаратуры МРК-32 входят три антенны и приемник ГЛОНАСС/GPS.
НАП МРК-32 функционирует как в стандартном, так и в дифференциальном режиме определения места по сигналам спутниковых радионавигационных систем ГЛОНАСС и GPS. Дифференциальный режим обеспечивает определение места с более высокой точностью по сравнению со стандартным режимом, однако для его реализации требуется одновременная работа двух комплектов навигационной аппаратуры. Один комплект устанавливается на диагностическом ЛА, другой на ККС. Погрешность определения координат ЛА в дифференциальном режиме составляет от 1 до 5 м в зависимости от расстояния между ККС и объектом [3].
Преимуществами использования тепловизионного контроля являются бесконтактный способ измерения температуры (объекты энергетики являются объектам и п овышенной опасности), а также возможность проводить диагностику энергетических объектов без вывода оборудования в ремонт, т. е. не прекращая подачу электроэнергии потребителям. Последнее обстоятельство накладывает некоторые ограничения на возможность использования тепловизионного контроля, так как при обследовании желательна нагрузка диагностируемой энергетической системы, составляющая 50–100 % от номинальной. Указанное ограничение делает невозможным использование комплекса диагностики на обесточенных (выведенных в ремонт) энергетических объектах.
Планируемые технические характеристики мобильного комплекса исследования энергетических объектов приведены в табл. 2.
Анализ достижимых значений технических характеристик показывает, что разрабатываемый комплекс мобильных технических средств обеспечивает оперативное определение координат тепловых аномалий энергетических объектов и имеет перспективы применения в области энергетики.
Таблица 2
Технические характеристики мобильного комплекса исследования энергетических объектов
|
Диапазон измеряемых температур исследуемого объекта, °С |
–40…+2000 |
|
Температурное разрешение, °С |
0,08 |
|
Погрешность измерения температуры, % |
± 2 |
|
Погрешность определения координат диагностического ЛА, м |
5 |
