Использование теории систем гибридного интеллекта для управления роботами

Автор: Бухаров Михаил Николаевич
Рубрика: Управление сложными системами
Статья в выпуске: 2, 2017 года.
Бесплатный доступ
Рассмотрены вопросы управления роботами на основе гибридного интеллекта. Отладка систем управления роботами выполняется на компьютерной модели. Описаны основные положения теории систем гибридного интеллекта, инструментальный программный комплекс. Рассмотрен пример создания системы управления группой роботов для уборки комнаты.
Робот, гибридный интеллект, система управления, компьютерная модель
Короткий адрес: https://sciup.org/148160306
IDR: 148160306 | УДК: 681.5
Using the theory of hybrid intelligence systems to control robots
The problems of robot control based on hybrid intelligence are considered. Debugging of robot control systems is performed on a computer model. The main provisions of the theory of hybrid intelligence systems are described, as well as an instrumental software package. An example of creating a control system for a group of robots for cleaning a room is considered.
Текст научной статьи Использование теории систем гибридного интеллекта для управления роботами
Введение. В статье рассмотрено создание систем управления роботами как систем гибридного интеллекта [1; 2] с использованием специально созданного инструментального программного комплекса [3; 4]. Отладка систем управления роботами выполняется на компьютерной модели [5; 6].
Основные положения теории систем гибридного интеллекта . Система гибридного интеллекта (СГИ) – это информационная система с уникальной архитектурой. Для описания архитектуры СГИ воспользуемся понятием «функционально-структурная схема информационной системы», введенным автором в 1987 году в кандидатской диссертации. Функциональноструктурная схема информационной системы – это перечень подсистем и модулей, из которых состоит система с описанием выполняемых ими функций и взаимодействия между ними в основных режимах работы системы. В 2012 году в докторской диссертации автор использует это понятие для определения архитектуры систем гибридного инт еллекта на основе процессов.
Схематично функционально-структурная схема системы гибридного интеллекта изображена на рис. 1. СГИ на основе процессов создается как иерархическая многоуровневая система. В качестве основы на первом уровне используются библиотеки готовых программ, реализующие исполнительную среду для работы системы. На втором уровне система управления человекомашинным комплексом представляется состояниями процессов, аккумулирующими логику работы комплекса, на третьем – совокупностью взаимодействующих процессов, а на четвертом – функциональными подсистемами, реализующими стратегию и тактику управления человекомашинным комплексом. Основной режим работы СГИ – это управление деятельностью. В этом режиме: функциональные подсистемы (сотрудники и их автоматизированные рабочие места (АРМ)) передают информацию о состоянии деятельности в процессы; процессы в зависимости от поступившей информации выдают те или иные команды в АРМы; АРМы, при необходимости, транслируют эти команды сотрудникам; сотрудники выполняют команды и передают ответы через АРМы в процессы; процессы в зависимости от ответов, поступивших от АРМов, выдают в АРМы новые команды и т.д.

Рис. 1. Функционально-структурная схема системы гибридного интеллекта
ВЕСТНИК 2017
При создании и исследовании систем гибридного интеллекта мы используем следующие уровни их представления: 1) уровень черного ящика; 2) уровень функциональной структуры; 3) уровень алгоритмов; 4) уровень программной реализации.
Уровень черного ящика. Управление деятельностью реализуется множеством взаимодействующих процессов. Причем эти процессы в системе гибридного интеллекта выполняются частично в компьютере, а частично – в коллективе людей (сотрудников и контрагентов организации).
Система гибридного интеллекта имеет структуру и логику функционирования. Структура системы гибридного интеллекта задается составом процессов и их состояний, а логика – решающими правилами (событиями) для всех состояний всех процессов.
ВЕСТНИК 2017
Под процессом понимается совокупность состояний. В каждый момент времени процесс может находиться только в одном состоянии. Это состояние будем называть текущим (или активным) состоянием процесса. Состояния одного процесса выполняются последовательно, а состояния из разных процессов в общем случае могут выполняться одновременно.
Логически взаимосвязанные группы процессов будем называть подсистемами.
Состояние - это некоторая логически обособленная часть (фрагмент) деятельности. Состояние описывается множеством событий. Каждое событие состоит из пары «Условие-Действие». Событие наступает, если выполняется условие. Наступление события - это выполнение связанного с ним действия.
Система гибридного интеллекта и соответствующая ей деятельность имеют интегральные показатели: C 0 - суммарная стоимость обеспечения деятельности; T 0 - средняя продолжительность основного цикла деятельности; V 0 - широта области применения (степень охвата входов); P 0 - полезность деятельности (степень удовлетворенности выходами); A 0 - адекватность реакции на воздействия внешней среды.
Обозначим систему гибридного интеллекта как кортеж из трех элементов:
D = <У, L, P>, (1) где: D - система гибридного интеллекта, реализующая некоторую деятельность; У - структура деятельности; L - логика выполнения деятельно- сти; P - интегральные показатели деятельности (C0, T0, V0, P0, A0).
Интегральные показатели (параметры) деятельности P могут быть определены как элементы векторного функционала от статических характеристик ( У и L ) и от динамических характеристик (параметров деятельности). В общем случае P определяется по формуле:
P = F ( У , L , I , O , V , R , K),
где F - функционал (функция, имеющая областью значений вещественные числа или векто- ры из вещественных чисел); I - вектор входных данных деятельности; O - вектор выходных данных деятельности; V- вектор воздействий внешней среды на систему гибридного интеллекта; R - вектор реакции системы гибридного интеллекта на воздействие внешней среды; K - вектор внутренних параметров системы гибридного интеллекта. Все перечисленные выше параметры системы гибридного интеллекта I, O, V, R, K изменяются во времени, то есть являются функ- циями времени. Поэтому добавим в их обозначе- ние переменную t - значение времени. Формула (2) примет вид:
P = F ( У , L , I ( t ), O ( t ), V ( t ), R ( t ), K ( t )). (3)
Система гибридного интеллекта преобразует входные данные в выходные данные:
O ( t ) = Q ( I ( t ), K ( t )), (4)
где Q - отображение декартова произведения множества входных данных и множества внутренних параметров системы гибридного интеллекта на множество выходных данных:
Q : I x К ^ О.
Система гибридного интеллекта реагирует на воздействия внешней среды определенной реакцией:
R ( t ) = Z ( V ( t ), K ( t )), (5)
где Z - отображение декартова произведения множества воздействий и множества векторов внутренних параметров системы гибридного интеллекта на множество реакций, Z : V x К ^ R.
Система гибридного интеллекта является дискретной динамической системой [1]. Ее динамику можно представить уравнением смены текущих состояний всех ее процессов:
x k + 1 = Y ( x k , u k X (6)
где к = 0, 1, 2, ..., N , x k е X , u k е U .
В формуле (6) используются следующие обозначения: X - множество возможных векторов текущих состояний всех процессов системы гибридного интеллекта; xk - вектор текущих (активных в момент времени k ) состояний всех процессов системы гибридного интеллекта; U - множество возможных алгоритмов управления, реализуемых событиями всех состояний всех процессов системы гибридного интеллекта; uk - алгоритм управления, реализуемый событиями всех текущих состояний всех процессов системы гибридного интеллекта в момент времени k ; Y - функция переходов всех процессов из одного текущего состояния в другое.
Функция Y определяет отображение:
Y : Xx U^X. (7)
Система гибридного интеллекта является детерминированной, если в любой момент времени k можно по текущему состоянию xk и управлению uk однозначно определить ее новое состояние в момент времени ( к + 1) . На практике детерминированные системы встречаются редко. Обычно нельзя точно определить новое состояние системы, можно только примерно (с некоторой вероятностью) ожидать, что система перейдет в ожидаемое новое состояние. Не полностью определенные объекты можно моделировать с помощью аппарата нечетких множеств. В этом случае неточные коэффициенты и величины задаются в виде функций принадлежности.
Динамика недетерминированной системы гибридного интеллекта описывается нечетким отношением:
Y : X x Ux X^ [0,1]. (8)
Формула (8) задает нечеткое подмножество декартова произведения Xx U x X . В формуле (8): X - множество возможных векторов текущих состояний всех процессов системы гибридного интеллекта; U - множество возможных алгоритмов управления, реализуемых событиями всех состояний всех процессов системы гибридного интеллекта; функция Y (функция переходов всех процессов из одного текущего состояния в другое) рассматривается как степень принадлежности элемента x k + 1 образу пары ( x k , u k ), где x k - вектор текущих (активных в момент времени k ) состояний всех процессов системы гибридного интеллекта; uk - алгоритм управления, реализуемый событиями всех текущих состояний всех процессов системы гибридного интеллекта в момент времени k .
Уровень функциональной структуры. Система гибридного интеллекта в широком смысле понимается нами как деятельность, основанная на равноправном сотрудничестве искусственного компьютерного и естественного человеческого интеллектов и процессной организации систем управления. Система гибридного интеллекта в узком смысле понимается как система управления деятельностью, основанная на равноправном сотрудничестве искусственного компьютерного и естественного человеческого интеллектов и процессной организации управления.
Функциональная подсистема в системе гибридного интеллекта представляет собой совокупность процессов, направленных на решение логически взаимосвязанного круга задач и человеческих ресурсов, и компьютерных программ для поддержания их выполнения. Компьютерные программы для поддержания выполнения процессов включают автоматизированные рабочие места для участников деятельности и функциональные модули, реализующие отдельные функции для использования в работе системы гибридного интеллекта. Процесс в системе гибридного интеллекта рассматривается как последовательность работ, выполняемых поочередно во времени и называемых состояниями процесса. Состояние процесса в системе гибридного интеллекта предстает как объединение (гибрид) открытой экспертной системы, построенной с использованием искусственных нейронных сетей, нечетких множеств и скоринговых моделей и реализующей совокупность правил деловой логики, с одной стороны, и человеческих ресурсов, с другой стороны. В качестве объединяющего механизма используется имитационная модель событийного типа.
Система гибридного интеллекта реализуется как иерархическая многоуровневая система. В качестве основы на первом уровне используются библиотеки готовых программ, реализующие исполнительную среду для работы системы гибридного интеллекта. На втором уровне система гибридного интеллекта представляется состояниями процессов, аккумулирующими деловую логику, на третьем - совокупностью взаимодействующих деловых процессов, а на четвертом - функциональными подсистемами, реализующими стратегию и тактику управления сложной деятельностью.
Компоненты первого уровня приобретаются у независимых разработчиков и поставщиков программного обеспечения, соответствующего открытым стандартам, или заказываются и разрабатываются специально. Формирование второго, третьего и четвертого уровней осуществляется сотрудниками организации при активной поддержке консультантов по системам гибридного интеллекта и с использованием инструментального программного комплекса и репозиториев типовых компонентов и решений (см. раздел «Инструментальный программный комплекс» далее).
Такая организация сложных деятельностей, как систем гибридного интеллекта, повышает их эффективность и гибкость, что особенно актуально в сегодняшнем быстро меняющемся мире.
Математическое описание функциональной структуры системы гибридного интеллекта может быть получено конкретизацией математического описания системы гибридного интеллекта как черного ящика (см. подраздел этого раздела выше). Напомним, что система гибридного интеллекта на уровне черного ящика обозначена нами как кортеж
D = , L, P>.
Структура системы гибридного интеллекта S имеет четыре уровня:
S = < S 1 , S 2, S 3, S 4 >, (9) где: S 1 - библиотеки готовых программ, реализующие исполнительную среду для работы системы гибридного интеллекта; S 2 - состояния процессов, аккумулирующих логику работы системы гибридного интеллекта; S 3 - совокупность взаимодействующих процессов; S 4 - функциональные подсистемы, реализующие стратегию и тактику управления системы гибридного интеллекта.
ВЕСТНИК 2017
ВЕСТНИК 2017
Обозначим библиотеки готовых программ, реализующие исполнительную среду для работы системы гибридного интеллекта, S 1 = { d i } , где: d i - i -я библиотека готовых программ; состояния процессов, аккумулирующих логику работы системы гибридного интеллекта, S 2 = { T i j } , где: T i j - состояние i процесса j ; совокупность взаимодействующих процессов, S 3 = { pnm } , где pn m - процесс m функциональной подсистемы n ; функциональные подсистемы, реализующие стратегию и тактику управления в системе гибридного интеллекта, S 4 = { s i } , где: s i - функциональная подсистема i .
Каждая функциональная подсистема s включает несколько процессов, несколько автоматизированных рабочих мест и несколько функциональных модулей:
s = <{Р, }, { a }, { m }>, (10) где: p i - i -ый процесс; a j - j -ое автоматизированное рабочее место участника деятельности (сотрудника или контрагента); m k - к -ый функциональный модуль, реализующий некоторую функцию в автоматизированном рабочем месте или в процессе.
Логика работы системы гибридного интеллекта - это множество правил (событий) всех состояний, всех процессов, всех функциональных подсистем системы гибридного интеллекта:
L = C > E^, (11)
где: C i”j - условие, а E i”j - действие состояния i процесса j функциональной подсистемы n .
Во множестве событий (11) можно выделить N подмножеств событий (i = 1, 2, 3 .„, N), составляющих группы процессов или подсистемы. То есть, подсистема с номером n - это подмноже- ство событий:

В подсистемах выделяем процессы, в процессах - состояния. В итоге можно записать следующие соотношения:
N „ , L nm , ,
L = U s n , s n = U P nm , P n , m = U T n , ml , Kml = 1 Cm J ^ Em J 1 . (13) n = 1 m = 1 i = 1 I
В каждый момент времени активным (то есть работающим) состоянием в каждом процессе является только одно состояние этого процесса. Эти состояния называются текущими состояниями процессов.
Можно варьировать структуру и логику работы системы гибридного интеллекта, с тем чтобы повысить эффективность функционирования системы (улучшить интегральные показатели).
Теперь можно ввести понятие преобразования системы гибридного интеллекта. Система D 1 может быть преобразована в систему D 2 путем изменения S и L . При этом интегральные показатели ее работы P в общем случае также изменятся. Если изменения S и L выполняются не произвольно, а по установленным правилам, то будем называть такое преобразование системы гибридного интеллекта - реорганизацией. Правила реорганизации могут охватывать ограничения или установки на изменение структуры S , на изменение логики работы L , а также на изменение интегральных показателей (параметров) работы P .
Обозначим ограничения и установки на изменение структуры системы гибридного интеллекта как S 0, ограничения и установки на изменение логики ее работы как L 0, а ограничения и установки на изменение интегральных показателей работы системы как P 0. Тогда преобразование системы гибридного интеллекта D 1 в систему гибридного интеллекта D 2 можно записать как:
D 2 = T ( D i ), (14) а реорганизацию системы гибридного интеллекта D 1 в систему гибридного интеллекта D 2 - как преобразование системы D 1 в систему D 2 при заданных ограничениях:
D 2 = T ( D 1 , S 0, L o, P o ). (15)
Ограничения и установки на изменение структуры системы гибридного интеллекта S o в формуле (15) могут представлять собой задание нескольких возможных вариантов: структуры системы; каждой из ее подсистем; каждого процесса всех подсистем; каждого автоматизированного рабочего места; каждого функционального модуля; ограничения и установки на изменение логики работы системы L 0 - несколько возможных вариантов каждого состояния для всех возможных вариантов структуры, определяемых ограничениями S 0; ограничения и установки на изменение интегральных показателей работы P 0 - несколько вариантов формул для расчета каждого параметра и несколько вариантов ограничений на значения или на тенденцию и темпы изменения во времени каждого параметра для всех возможных вариантов структуры и логики работы системы гибридного интеллекта, определяемых ограничениями S 0 и L 0.
Варьируя ограничения на статические характеристики (S0 и L0) и на динамические характеристики (I(t), O(t), V(t), R(t), K(t) (см. описание в модели черного ящика), можно строить системы гибридного интеллекта, удовлетворяющие определенным требованиям. Требования к разрабатываемой системе гибридного интеллекта задаются ограничениями и установками на изменение интегральных показателей ее работы Po.
Уровень алгоритмов . Алгоритмическое представление системы гибридного интеллекта включает: алгоритм работы системы исполнения процессов, алгоритмы выполнения команд, поступающих от процессов в автоматизированные рабочие места, и алгоритмы функциональных модулей, реализующих нейронные сети, скоринговые модели, нечеткую логику и др. функции. Подробное описание этих алгоритмов дано в [1; 2; 4].
Уровень программной реализации . Программная реализация системы гибридного интеллекта состоит из двух основных частей: инструментальных программ для подготовки и трансляции описаний системы гибридного интеллекта в программные коды для компьютера и программ, реализующих исполнительную систему для процессов, и исполнительную систему для автоматизированных рабочих мест.
Инструментальные программы для подготовки и трансляции описаний системы гибридного интеллекта – это транслятор с языка описания структуры и логики деятельности и графические интерактивные средства для облегчения создания описаний бизнес-процессов организации.
Исполнительная система для процессов позволяет загружать в память компьютера описания процессов и запускать их на исполнение, а также проводить их отладку. Для похожих по поведению процессов создаются шаблоны. Исполнительная система процессов позволяет по шаблону создать экземпляр процесса, загрузить его в память и запустить на исполнение, прослеживать ход выполнения, собирать и анализировать параметры деятельности, реализуемой системой гибридного интеллекта. В частности, в исполнительной системе для процессов можно устанавливать точки останова в процессах.
Исполнительная система для автоматизированных рабочих мест позволяет загрузить описания алгоритмов выполнения команд, поступающих от процессов, и запустить их на исполнение. Она также выступает в роли интегратора функциональных модулей, подключаемых к автоматизированному рабочему месту для выполнения прогнозирования с помощью нейронных сетей, ранжирования проектов с помощью скоринговых моделей, распознавания ситуаций на основе нечетких множеств, нечеткой логики и других функций.
Подсистема исполнения (исполнительная система для процессов и исполнительная система для автоматизированных рабочих мест) может работать в трех режимах: 1) в реальном времени – для управления деятельностью; 2) в масштабируемом реальном времени – для имитации управления деятельностью; 3) в модельном времени – для моделирования управления деятельностью. На практике все эти три режима исполнения находят свое применение: 1) исполнение в реальном времени (кратко – реальное управление) – для управления работой организаций; 2) исполнение в масштабируемом реальном времени (кратко – имитация управления) – для обучения сотрудников организаций и для презентаций в учебных или коммерческих целях; 3) исполнение в модельном времени (кратко – моделирование управления) – для проектирования, а также для анализа и исследования с целью совершенствования работы организаций. При моделировании управления, при имитации управления и при реальном управлении используется одна и та же исполнительная система для процессов и одна и та же исполнительная система для автоматизированных рабочих мест, и одни и те же описания процессов и автоматизированных рабочих мест. Это уменьшает погрешности результатов анализа за счет несоответствия модели и реальной действительности при моделировании управления и повышает реалистичность презентаций при имитации управления.
Инструментальный программный комплекс . Для создания и использования систем гибридного интеллекта был разработан специальный инструментальный программный комплекс [3; 4]. Он состоит из нескольких подсистем: подсистемы описания структуры и логики деятельности, реализуемой системой гибридного интеллекта; репозитория шаблонов систем гибридного интеллекта и их компонентов; банка описаний конкретных систем; подсистемы проектирования и реорганизации систем; подсистемы моделирования и анализа систем; подсистемы генерации информации для настройки систем; подсистемы исполнения систем; архива реализованных проектов; базы знаний по инструментальному комплексу и по методам создания и использования систем гибридного интеллекта на его основе.
Для навигации по компонентам комплекса используется дерево разделов. В каждом разделе хранение информации осуществляется в виде списка документов. При регистрации документа в инструментальном программном комплексе на него заводится карточка. Карточка содержит краткое описание документа. Каждый документ может быть запущен в обработку по своему собственному сценарию обработки. Сценарии об-
ВЕСТНИК 2017
ВЕСТНИК 2017
работки документов являются шаблонами или процессами, для управления которыми в инструментальном комплексе имеются специальные средства.
Для облегчения навигации по проектируемой системе гибридного интеллекта используются интерактивные графические средства. Рассмотрим их на примере навигации по процессу. Процесс представляется графически в виде ориентированного графа. Вершинами графа являются состояния процесса, а дугами - переходы между состояниями. Если из какого-либо состояния процесса возможен переход в два или более состояния, то переходы обозначаются пунктирной линией. Одно из состояний процесса помечено -это рассматриваемое (активное) в данный момент состояние. Щелчок по нему мышкой открывает диалог «События» с информацией о событиях данного состояния, в котором можно выбрать любой диалог и перейти в него из иерархии диалогов проектирования системы гибридного интеллекта.
Для визуализации результатов моделирования системы гибридного интеллекта используются таблицы, двумерные графические схемы и трехмерные анимационные сцены. Накопление информации о модели происходит в специальной базе данных. Причем визуализация этих данных может проводиться как в процессе моделирования, так и после окончания моделирования.
Разработанная модель деятельности организации полностью представлена в компьютере и может анализироваться как компьютерными программами, так и специалистами. В то же время модель может исполняться компьютерными программами и исполнительными механизмами (приборами) и/или сотрудниками, реализуя управление деятельностью. По мере накопления опыта работы сотрудники организации и программы исполнительной системы процессов могут изменять и совершенствовать процессы и объекты, что немедленно отражается в модели работы организации. Консультанты и аналитики тоже непрерывно анализируют модель и работают над ее совершенствованием. Все улучшения модели также немедленно поступают в практику управления работой организации.
Архитектура информационной системы для управления роботами . К настоящему времени нами получен небольшой практический опыт применения теории систем гибридного интеллекта для создания информационных систем управления деятельностью с использованием роботов [7]. Информационная система для управления роботами состоит из двух частей.
-
1. Исполнительная система робота (ИСР).
-
2. Исполнительная система процессов (ИСП).
Исполнительная система робота - это АРМ, но не для сотрудника организации, а для робота. ИСР принимает команды от процессов и управляет функциональными подсистемами робота при выполнении этих команд. После выполнения роботом команды ИСР посылает ИСП ответ о выполнении команды. Посылка команд и ответов осуществляется через каналы.
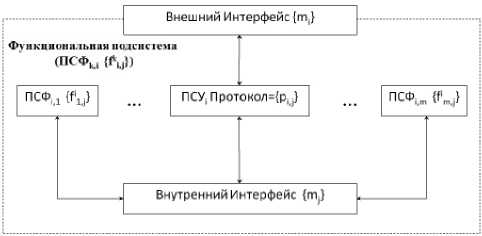
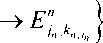
Рис. 2. Функционально-структурная схема ИСР
Примечание. ПСФki - функциональная подсистема i в ПСФn k; ПСУ i - riодсистема управления в ПСФki; pj - процесс j в ПСУi. mi - сообщение i; f - функциональный модуль j в ПСФim.
ИСР создается как система гибридного интеллекта. Вместо АРМ здесь выступают функциональные подсистемы робота. Работой этих подсистем управляют процессы. Эти процессы выполняются ИСП. Функциональные подсистемы робота устроены аналогично. Функционально-структурная схема ИСР изображена на рис. 2.
Таким образом, более детально, на уровне к каждая i -я функциональная подсистема робота ski представляется как кортеж из подсистемы управления (множество процессов { p i j } ), нескольких функциональных подсистем Следующего нижнего уровня { s i j . }, внутреннего { m i j } и внешнего { m i j } интерфейсов, множества функциональных модулей { f j^ } :
ski = < { Pj },{ sy. }, { mj },{ my. },{ fy, } > . (16)
Внутренний интерфейс { m ij . } подсистемы sk i является в то же время внешним интерфейсом для функциональных подсистем следующего нижнего уровня { s i j } и т.д.
Для упрощения разработки ИСП мы используем компьютерную модель ИСР. Рассмотрим это на примере.
Пример создания системы управления роботами . Рассмотрим управление группой из трех роботов. В состав группы роботов входят: один Робот-менеджер и два Робота-работника. Роботы собирают бумажки в комнате.
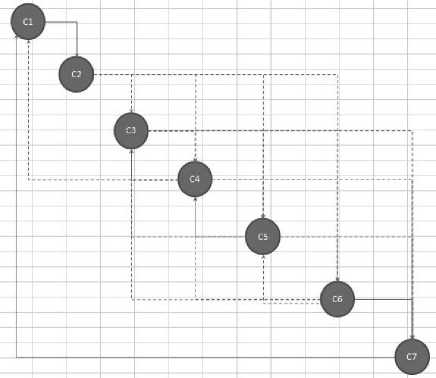
Рис. 3. Граф Процесса подсчета бумажек Роботом-менеджером
ИСП включает четыре процесса.
-
1. Процесс подсчета бумажек Роботом-менеджером.
-
2. Процесс сбора бумажек Роботом-работником 1.
-
3. Процесс сбора бумажек Роботом-работником 2.
-
4. Процесс уборки.
На рис. 3 показан граф Процесса подсчета бумажек Роботом-менеджером. Вершинами графа являются состояния процесса, а дугами – переходы между состояниями при выполнении процесса.
На рис. 4 приведена структура Процесса подсчета бумажек. Процесс состоит из 7 состояний.
Процесс подсчета бумажек
Состояния процесса
-
1 Ожидание команды подсчитать бумажки
-
2 Подсчет числа бумажек
-
3 Перемещение по комнате вправо
-
4 Перемещение по комнате влево
-
5 Перемещение по комнате вниз
б Перемещение по комнате вверх
-
7 Подготовка и отправка отчета
Рис. 4. Структура Процесса подсчета бумажек
На рис. 5 изображен пример одного из состояний Процесса подсчета бумажек. Состояние описывается с помощью временных и условных событий. События могут быть циклическими.
Компьютерная модель ИСР выглядит, как показано на рис. 6.
Рис. 5. Пример состояния Процесса подсчета бумажек
Рис. 6. Модель работы роботов
Модель имеет графический интерфейс для наглядного изображения работы роботов под управлением ИСП.
ИСП – это компьютерная программа, получившая название «Панель управления». Основное окно этой программы изображено на рис. 7.

Рис. 7. Основное окно программы «Панель управления»
ВЕСТНИК 2017
С помощью кнопок Панели управления можно в ручном режиме проверить правильность работы отдельных шагов модели. Для облегчения отладки процессов ведется Протокол. Фрагмент Протокола приведен на рис. 8.
|
Прлучетеле |
• Отпрееитель |
• Ндемиие |
- Сообщение |
|
Пу' |
Модело |
Модель-ГУ |
Инициелимцма модели прсеиеаде» |
|
Модель |
ПУ Модель |
НМ X* |
|
|
1V |
Модель |
модель- лу |
ИМ 1 • i |
|
Модель |
Г1 |
Пу Модель |
RM У* |
|
IV |
Модель |
модель-ПУ |
НМ Г» ? |
|
Модель |
Пу Модель |
RR1 X* |
|
|
ПУ |
модель |
модель-ПУ |
RH1 Х-3 |
|
Модела |
г, |
Пу Модель |
RR1 У» |
|
ПУ |
Модель |
модельПУ |
RR1 Г-3 |
|
Мэдела |
ПУ |
Л У-Модель |
RR2 X- |
|
ПУ |
модель |
модель-лгу |
RR2 X:3 |
|
Модед» |
ПУ |
ПУ-М одела |
RR2_V= |
|
ПУ |
Модель |
Модель пу |
RR2 Y: ) |
|
Мзд?п» |
ПУ |
ПУ-М оде ль |
ILljr мил роботом ] |
|
ПУ |
модель |
модель-пу |
|
|
ПУ |
Модель |
Мзде ль-ПУ |
UJar own прои льезе-. |
|
ммсла |
ПУ |
пу-модель |
Ц.ЧГ Ь*л робо’О" 3 |
|
ПУ |
Модель |
модель-пу |
|
|
ПУ |
Модель |
Модель-пу |
ц.уг о*»л пронюеле* |
|
Модель |
Ггу |
пу модель |
Ц.ИГ о*п робо’ом з |
|
ПУ |
Модель |
Модель-пу |
Рис. 8. Протокол выполнения процессов
После отладки процессов на компьютерной модели можно приступить к доводке управления роботами на реальном оборудовании. На рис. 9 изображен Робот-работник.

Рис. 9. Пример робота
ВЕСТНИК 2017
Робот состоит из следующих основных частей: колесного шасси, двух контроллеров, набора датчиков, видеокамеры, манипулятора для захвата бумажек. Первый контроллер выполняет управление функциональными подсистемами робота. Второй контроллер осуществляет первичную обработку изображений, поступающих от видеокамеры.
Реализация системы управления роботами состоит из двух частей: программы ИСР и программы ИСП. Программа ИСР находится в первом котроллере каждого робота. Программа ИСП находится на персональном компьютере. Обмен командами и ответами об их исполнении осуществляется по Wi-Fi. Информация от видеокамеры после первичной обработки на втором контроллере каждого робота передается для дальнейшей обработки в персональный компьютер также по Wi-Fi.
Заключение
Небольшой опыт, полученный нами при создании систем управления роботами с использованием теории систем гибридного интеллек- та [7], показывает, что это реальный путь к организации на практике использования роботов. Исчерпывающую информацию о теории систем гибридного интеллекта и ее практическом применении для создания роботов можно найти на официальных сайтах:
– ассоциации независимых консультантов в области наукоемких технологий «Интеллект Инвест Центр»;
– научно-исследовательской группы «Оберон»;
– портала дистанционного обучения «Независимый центр знаний».
Список литературы Использование теории систем гибридного интеллекта для управления роботами
- Бухаров М.Н. Системы гибридного интеллекта. -М.: Научтехлитиздат, 2005. -352 с. (ил).
- Бухаров М.Н. Теория систем гибридного интеллекта. Проектирование, стандартизация, моделирование и оптимизация: монография. -М.: ГОУ ВПО МГУЛ, 2008. -214 с. (ил).
- Бухаров М.Н. Технология создания систем гибридного интеллекта на основе программного комплекса «Оберон-3000»/М.Н. Бухаров//Экологические системы и приборы. -2005. -№ 3. -С. 31-37.
- Бухаров М.Н. Управление сложными системами на основе гибридного интеллекта/М.Н. Бухаров//Спецтехника и связь. -2015. -№ 3. -С. 119-140.
- Бусленко Н.П. Моделирование сложных систем. -М.: Наука, 1978. -395 с.
- Шеннон Р. Имитационное моделирование систем -искусство и наука. -М.: Мир, 1990. -418 с.
- Бухаров, М.Н. Управление экологическими объектами с помощью роботов/М.Н. Бухаров//Материалы Одиннадцатого Международного симпозиума «Проблемы экоинформатики», Москва, 2-4 декабря 2014 г. -М.: ПЦ МЭИ, 2014. -С. 55-63.
