Исправление перспективных искажений с помощью зеркала

Автор: Михайлов Павел Иванович
Журнал: Компьютерная оптика @computer-optics
Рубрика: Дифракционная оптика, оптические технологии
Статья в выпуске: 4 т.33, 2009 года.
Бесплатный доступ
Работа посвящена устранению перспективных искажений, появляющихся на изображении из-за расположения камеры под углом к объекту наблюдения. В работе предлагается исправлять возникающие перспективные искажения с помощью зеркала особой формы. Получено дифференциальное уравнение для поверхности зеркала, обладающего требуемыми свойствами, уравнение решено численно. Свойство зеркала устранять перспективные искажения проверено моделированием рассматриваемой оптической системы методом трассировки лучей.
Коррекция перспективы, трассировка лучей, зеркало
Короткий адрес: https://sciup.org/14058903
IDR: 14058903
Текст научной статьи Исправление перспективных искажений с помощью зеркала
Перспективные искажения обычно возникают в случае, если плоскость изображения и плоскость предмета не параллельны межд у собой. Например, при фотографировании высоких объектов с уровня земли (архитектурных сооружений) линии, вертикальные на фотографируемом объекте, на изображении получаются наклонными. На рис.1 (слева) представлено расположени е камеры над серединой фотографируемого объекта (в случае фотографирования архитектурных сооружений – посередине высоты здания). В этом случае перспективные искажения отсутствуют, черно-белые полосы на изображении одинаковы по ширине.
Рис. 1. Взаимное расположение предмета и камеры
Но, как правило, не уд ается расположить камеру точно над объектом наблюдения. Здания приходится фотографировать с земли, камера наблюдения располагается не над улицей, а, например, на стене одного из зданий (рис. 1, по центру). В этом случае, если плоскости изображения и предмета параллельны, перспективных искажений нет, но не весь предмет помещается в кадре. Поэтому камеру приходится наклонять, чтобы в кадр попал весь предмет (рис. 1, справа). В этом случае черные и белые полосы имеют разную ширину, проявляются перспективные искажения. Чем дальше область предмета расположена от плоскости изображения, тем меньше ее ширина на изображении.
Сущ еств уют различные способы исправления перспективных искажений. Программны е методы коррекции [6] устраняют видимые искажения (вертикальные на предмете, но сходящиеся на изображении линии после коррекции становятся вертикальными), но при этом расположенные дальше от плоскости изображения области предмета не становятся лучше различимыми.
Для исправления перспективных искажений во время съемки используются специальные шифт-объективы [7]. Оптическая ось объектива проходит не посередине пленки (светоч увствительной матрицы) (рис. 2, слева), и при съемке в кадр попадает весь предмет. Существующие шифт-объективы позволяют сдвигать оптическую ось объектива на расстояния до 20 мм, исправляя угол наклона до 25 о [8] (имеется в виду угол межд у перпендикуляром к поверхности предмета и оптической осью камеры). Кроме того, в случае сдвига объектива в сторону от центра пленки свет п адает на объектив под большим углом, и, значит, сильнее ск азываются оптические недостатки объектива.
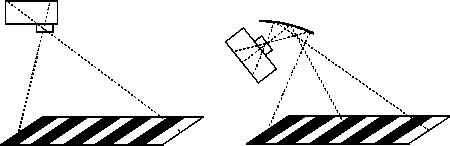
Рис. 2. Исправление перспективных искажений
В данной работе предлагается иной подход. Исправлять перспективные искажения предлагается с помощью зеркала особой формы, расположенного так, как показано на рис. 2, справа. Зерк ало б удет вносить определенные искажения в получаемое изображение, но с его помощью можно исправлять искажения от больших углов наклона, чем с помощью шифт-объектива. Кроме того, для систем видеонаблюдения требуется не столько высокая детализация (здесь и далее под детализацией изображения в какой-либо его точке будем понимать минимальный угловой размер различимых деталей предмета, процедура проверки различимости б удет описана ниже) изображения, сколько возможность фиксации и идентификации происходящих с наблюдаемым объектом событий. При этом допусти мы некоторые искажения получаемого изображения. Если камера системы наблюдения расположена вдоль стены здания или вдоль забора, то ближние к камере области будут получаться с большей детали- зацией, а удаленные области – с меньшей дет ализа-цией, чем нужно для выполнения поставленных перед такой камерой задач. С помощью зеркала можно ценой вносимых им искажений добиться одинаковой детализацией как уд аленных, так и близких областей предмета. В некоторых случаях возникающими искажениями можно будет пренебречь.
На рис. 4 вдоль осей координат показаны предмет (горизонтально) и соответствующее ему искаженное изображение (вертикально) для угла наклона ∆ = π 3 . Зависимость p от q показывает, как растягивается или сжимается изображение в зависимости от угла наклона Δ.
1. Характер перспективных искажений
2. Зеркало для коррекции перспективных искажений
Рассмотрим, как именно меняется изображение предмета в случ ае, если камера расположен а под углом к плоскости изображения (рис. 3).
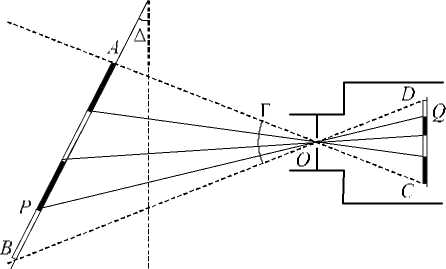
Рис. 3. Формирование изображения предмета, расположенного под углом к плоскости изображения
Рассмотрим случай, когда предмет н аходится на значительном расстоянии от камеры (в «бесконечности»). В этом случае можно считать, что интенсивность точки Q на изображении (рис. 5) определяется лучами света, ид ущими в направлении PO.
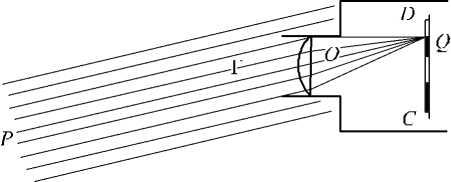
Рис. 5. Предмет расположен на значительном удалении от камеры
Расположим на пути лучей света зеркало M (рис. 6). Если зеркало велико по сравнению с камерой, то интенсивность точки изображения в направлении CD будет определяться узким пучком лучей направления BCO. Необходимо найти зеркало такой формы, чтобы изображение наклоненного предмета получалось бы как от предмета, расположенного без наклона. Пусть ∠ CDE = φ , ∠ AOB = ξ , γ ( φ ) - угол наклона касательной в точке C.
Камера с углом изображения Γ направлена на расположенный под углом Δ к плоскости изображения предмет AB. На плоскости изображения формируется изображение предмета DC, при этом точка P предмета переходит в точку Q изображения. Рассмотрим ф ункциональную зависимость q = CQ / DC , q ∈ [0,1]от p = AP / AB , p ∈ [0,1]
Гл .г) (Г pcos ∆ + cos
( 2 J (2
(Г) (. Г)
cos cos ∆- - p sin Γ sin ∆
(2) ( 2)
График зависимости p от q для Γ = π 4 и для различных значений ∆ ∈ {0, π 8, π 6, π 4, π 3} представлен на рис. 4.
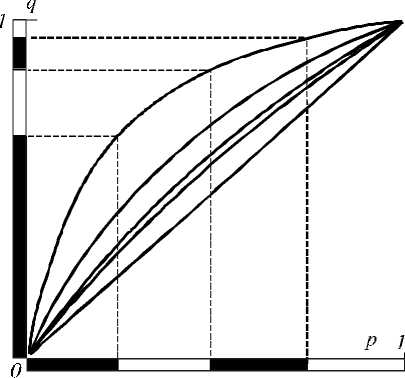
Рис. 4. График зависимости q от p

Рис. 6. Схема расположения зеркала между предметом и камерой
Тогда sin φ+ξ -1
tg ( γ ( φ )) = ( ) . (2)
cos(φ+ξ)
Зная угол наклона касательной к поверхности зеркала в любой точке, можно записать уравнение поверхности зеркала в полярны х координатах с центром в точке D:
r′(φ)-
r ( φ ) tg ( γ ( φ ))
= 0.
Преобразуя данное уравнение, получаем:
1 tg ( γ ( φ ))
1 - tg φ ⋅ tg ξ
Ж 7 tg ξ 2 + 1
tgφ+tgξ+
cos φ
- dφ
r ( φ ) = e ∫ tg ( γ ( φ )) ⋅ r (0).
Это уравнение решалось численно. В случае ∆ = 0 решением данного уравнения является прямая (плоское зеркало).
-
3. Проверка свойств зеркала методом трассировки лучей
Свойство найденной поверхности исправлять перспективные искажения проверялось методом трассировки лучей. Моделирование проводилось в предположениях геометрической оптики [1]. Предмет, расположенный под углом ∆ к плоскости изображения, состоит из n плоских ламбертовских [4] источников света (рис. 7), каждый источник света испускает m лучей. Лучи отражаются от зеркала и попадают в камеру. Камера состоит из непроницаемого для лучей корпуса, объектива и «светочувствительной матрицы». Далее лучи преломляются на объективе камеры и попадают на «светочувствительную матрицу», разбитую на k светочувствительных ячеек.
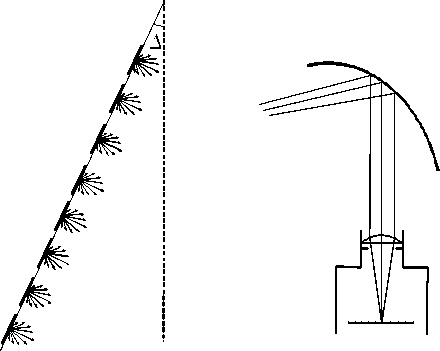
Рис. 7. Взаимное расположение предмета, зеркала и камеры для проверки свойств зеркала методом трассировки лучей
Интенсивность изображения i-го пикселя формируется в зависимости от количества лучей, пересекшихся с рассматриваемой ячейкой номер i. В качестве объектива камеры использовались (рис. 8) камера-обскура (отверстие в непрозрачной пластинке), объектив из одной гиперболической линзы, описанной в [3], а также фотографический объектив И-10 [5].
В качестве предмета использовалось одномерное изображение размером 128 пикселей (рис. 9). «Светочувствительная матриц а» камеры состояла из 256 ячеек. Предмет расположен на значительном удалении от камеры, камера сфокусирована на «бесконечность».
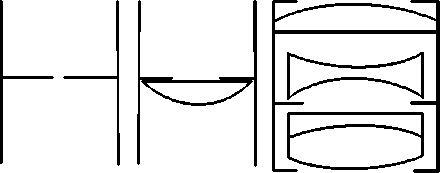
Рис. 8. Различные объективы, использованные для получения изображения методом трассировки лучей

Рис. 9. Предмет для проверки свойств зеркала методом трассировки лучей
На рис. 10 показано изображени е этого предмета, полученное для случая угла наклона межд у плоскостью предмета и плоскостью изображения ∆ = π 4 , предмет расположен в «бесконечности», камера без оптических недостатков (рис. 8, слева). В левой части изображения заметна повышенная детализация (при съемке элементы этой области видны под большим углом), справа же заметно понижение детализации – белые полосы в правой части предмета уже не различимы. Цель исправления перспективных искажений состоит в том, чтобы добиться одинаковой детализации по всему изображению.

Рис. 10. Изображение предмета при наклоне камеры, без зеркала
Расположим на пути луч ей зеркало так, как показано на рис. 7. В качестве характеристики относительных размеров зеркала и камеры б удем использовать отношение ширины апертурной диафрагмы к расстоянию от диафрагмы до зеркала в виде 1:d.
Уравнение поверхности зеркала получено при допущении , что камера очень мала по сравнению с зеркалом, и на интенсивность каждой точки изображения влияют лучи одного соответствующего направления. Если же размеры камеры (точнее, ширина апертурной диафрагмы) сравнимы с размерами зеркала, то на интенсивность точки изображения буд ут влиять лучи разных направлений, внося таким образом искажения в изображени е предмета. Чем больше размер зеркала по сравнению с камерой, тем искажения меньше. Искажения носят характер «размытия» изображения. За счет оптических свойств зеркала повышается детализация участков предмета, видимых под меньшим углом, и одновременно понижается за счет вносимых зеркалом искажений.
На рис. 11 показаны изображения предмета, полученного после расположения зеркала найденной ранее формы межд у предметом и камерой, для разных относительных размеров зеркала и камеры - 1:6, 1:25, 1:50, 1:100. На рис. 11 внизу (соответствую- щему большему относительному размеру зеркала) белые полосы по всему предмету различимы, кроме того, заметна одинаковая ширина цветных полос в сравнении с рис.10. При уменьшении относительных размеров зеркала (рис. 11, вверху) заметны вносимые зеркалом искажения – изображени е полос более размыто и о повышении детализации в этом случае говорить нельзя.
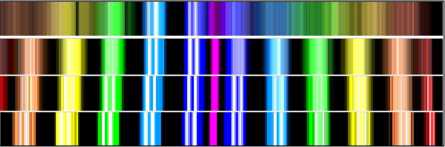
Рис. 11. Изображения, полученные с использованием корректирующего зеркала, для разных соотношений размеров зеркала и камеры
-
4. Детализация получаемых изображений
Для определения детализации получаемого изображения использовались «миры». Предмет, рассматриваемый с помощью оптической системы, состоял из двух светлых полосок определенной ширины, разделенных темной полоской той же ширины. Последовательно рассматривая миры уменьшающегося размера, фиксировалась мира, на изображении которой были различимы две светлые полоски. В качестве критерия различимости использовалась след ующая процед ура. На изображении выделялись два максимума интенсивности – слева и справа от темной полоски (рис. 12). Две соседние полоски различаются, если минимум интенсивности межд у ними достаточно мал, чтобы его разглядеть. Если отношение интенсивности в максимумах к интенсивности посередине межд у максимумами было больше заданной константы а = 0,5, то полоски считались различимыми .
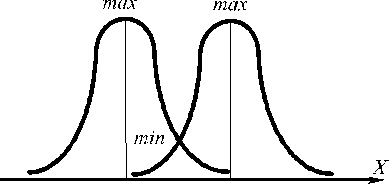
Рис. 12. Определение различимости
На рис. 13 приведены графики значений детализации (углов, под которыми видна различима мира минимального размера) в различных частях изображения, полученных для случая предмета без н акло-на (горизонтальная прямая) и с наклоном плоскости предмета по отношению к плоскости изображения.
Заметно повышение детализации в левой части изображения и понижения в правой (по срав нению детализацией предмета без наклона). Это обуславливается тем, что детали в левой части изображения видны под большим уг лом, ч ем детали правой части.
На рис. 14 приведены графики детализации изображений, полученны х с использованием корректирующего зеркала для различных относительных размеров зеркала и диафрагмы. Для небольших относительных размеров зеркала и диафрагмы заметно значительное понижение детализации за счет вносимых зеркалом искажений. С увеличением размеров зеркала детализация растет и после некоторого порога (предельного размера зеркала) «кружок рассеяния» становится меньше, чем размер светочувствительной ячейки камеры. После этого дальнейшее ув еличение зеркала не б удет приводить к повышению детализации.
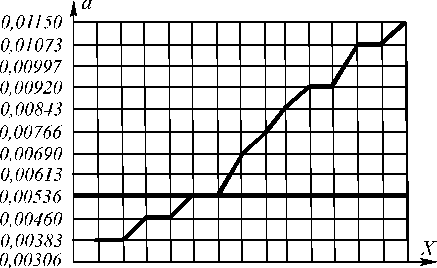
Рис. 13. Детализация изображений без использования корректирующего зеркала
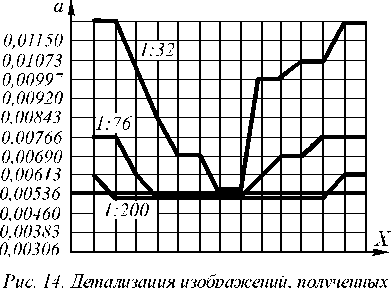
с использованием корректирующего зеркала
-
5. Устранение искажений, вносимых зеркалом
Возникает вопрос, можно ли каким-либо образом устранить искажения, вносимые зеркалом в случае, когда относительные размеры зеркала и объектива меньше предельного (т.е. такого порогового значения, после которого увеличени е зеркала не б удет приводить к увеличению дет ализации). Пусть функции задают соответственно предмет S ( x ) и изображение L ( x ) . Эти ф ункци и связаны уравнением:
j K ( x, t ) S (t ) dt = L ( x ).
Задача нахождения S ( x ) (предмета) по L ( x ) (изображению) является некорректной (некорректно поставленной), т.к. малые ошибки в L ( x ) и ядре могут приводить к большим ошибкам в решении [2].
В дискретном случае S(x) и L(x) заменяются на векторы, а уравнение (5) – на систему линейных уравнений. Эта система оказывается разрешимой, и по известному вектору изображения (с искажениями, вносимыми зеркалом) удает ся восстановить предмет (рис. 15). Сверху – изображение с искажениями, снизу – результат восстановления.

Рис. 15. Устранение искажений, вносимых зеркалом
Заключение
С помощью зеркала и послед ующей обработки полученного изображения удает ся устранить перспективные искажения в изображении предмета. Рассмотренная выше оптическая система, состоящая из камеры и корректирующего зеркала, может найти применение, например, в системах видеонаблюдения, где решающим является не качество изображения, а возможность идентифицировать происходящие на наблюдаемом объекте события.
