Испытание систем ориентации и стабилизации космических аппаратов с применением имитаторов звездного неба

Автор: Горелко М.Г., Мурыгин А.В.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 т.23, 2022 года.
Бесплатный доступ
В работе исследуется необходимость создания метода имитации звездного неба для отработки космических аппаратов и проведения испытаний систем ориентации и стабилизации в лабораторных условиях. Современное освоение космического пространства и, как следствие этого, усложнение технических требований к средствам обеспечения полета постоянно повышаются, соответственно, возрастают требования по обеспечению точности определения положения и ориентации космического аппарата. Приводится история развития приборов астроориентации и, в частности, звездных датчиков. Современный этап развития звездных датчиков наступил с появлением матричных приемников излучения: ПЗС- и КМОП-видеоматриц. Такие звездные датчики привязываются уже не к отдельным, заранее заданным звездам, а определяют свою ориентацию по изображениям групп звезд, видимых в поле зрения прибора. Приводятся примеры по их области применения, а именно определение ориентации датчика, наведение некоторого устройства, установленного на космический аппарат, и другие. Приводятся современные требованиях к астронавигации. Рассматриваются основные принципы наземной отработки системы ориентации и стабилизации космического аппарата с использованием имитаторов звездного неба. Это этап отработочных и автономных испытаний на аппаратно-программном стенде полунатурного моделирования. На сегодняшний день на предприятии АО «ИСС» для проведения данных типов испытаний космических аппаратов имеется комплексно-моделирующий стенд, использующий методы как математического, так и полунатурного моделирования, в состав которого входят различные имитаторы звездного неба. Развитие данных имитаторов имеет большую историю, приводится сравнительная таблица используемых ранее имитаторов. Показаны структуры как прошлых, так и современных имитатора звездного неба. В выводах говорится о необходимости создания метода, который позволит имитировать вращение космического аппарата со скоростями до 15-30°/с. Данный метод позволит проводить испытания системы ориентации и стабилизации современных космических аппаратов.
Система ориентации и стабилизации, звездный датчик, имитатор звездного неба, динамические испытания, космический аппарат
Короткий адрес: https://sciup.org/148325800
IDR: 148325800 | УДК: 629.78 | DOI: 10.31772/2712-8970-2022-23-4-688-695
Testing of spacecraft orientation and stabilization systems sing starry sky simulators
The paper investigates the need to create a method of simulating the starry sky for testing spacecraft and conducting tests of orientation and stabilization systems in laboratory conditions. Modern space exploration and, as a consequence, the complexity of technical requirements for flight support facilities are constantly increasing, respectively, the requirements for ensuring the accuracy of determining the position and orientation of the spacecraft are increasing. The history of the development of astroorientation devices and, in particular, stellar sensors is given. The modern stage of development of stellar sensors came with the advent of matrix radiation receivers: CCD and CMOS video matrices. Such stellar sensors are no longer tied to individual, predefined stars, but determine their orientation from images of groups of stars visible in the field of view of the device. Examples are given for their field of application, namely, determining the orientation of the sensor, pointing some device mounted on a spacecraft, and others. Modern requirements for astrogation are given. The basic principles of ground-based testing of the spacecraft orientation and stabilization system using starry sky simulators are considered. This is a stage of development and autonomous tests on a hardware and software stand of semi-natural modeling. To date, the ISS JSC enterprise has a complex modeling stand for conducting these types of spacecraft tests, using methods of both mathematical and semi-natural modeling, which includes various simulators of the starry sky. The development of these simulators has a long history, a comparative table of previously used simulators is given. The structures of both past and modern simulators of the starry sky are shown. The conclusions state the need to create a method that will simulate the rotation of the spacecraft at speeds up to 15-30 °/s. This method will allow testing the orientation and stabilization system of modern spacecraft.
Текст научной статьи Испытание систем ориентации и стабилизации космических аппаратов с применением имитаторов звездного неба
Современное освоение космического пространства требует выхода за пределы околоземных орбит, и, как следствие этого, технические требования к средствам обеспечения полета космического аппарата (КА) постоянно повышаются, а для решения научных задач, в частности, астрофизических, постоянно возрастают требования по обеспечению точности определения положения и ориентации КА [1; 2].
Перед разработчиками современных КА поставлена задача, обеспечивать высокую точность ориентации и стабилизации КА в пространстве. От решения данной задачи зависит успех проводимых научных экспериментов в космосе и выполнение космическим аппаратом целевых функций.
В наше время космические аппараты связи и навигации представляют собой сложные автоматизированные комплексы и способны решать целый ряд прикладных задач. Постоянно происходит развитие КА в направлении их функциональных назначений, усложнение применяемых и внедрение новых бортовых систем, приборов, механизмов.
Ярким примером является система ориентации и стабилизации КА (СОС). СОС, наряду с другими методами определения ориентации КА, использует метод определения ориентации относительно звезд и планет, который является одним из основных типов астроориентации [3].
В развитии астроориентации можно выделить несколько этапов. Первый этап – использование визуальной ориентации по звездам. Особое значение она приобретала при отсутствии четких ориентиров на местности: у кочевников и в мореплавании. Позднее появились приборы для более точных измерений: секстанты, астролябии и т. п. Подобные навыки и методы навигации используются до сих пор [4].
Второй этап развития астроориентации настал с появлением летательных аппаратов (ЛА). После чего основным компонентом их систем ориентации стали гирокомпасы. Эти системы не позволяли длительное время удерживать ориентацию ЛА из-за так называемого ухода гироскопов – их прецессии под действием неполностью учтенных внешних сил. Контроль ухода осуществлялся с помощью звездных датчиков (ЗД). Первые поколения ЗД для решения задач астроориентации работали по нескольким ярким звездам с известным положениями. Подобные ЗД, как правило, имели систему наведения на яркий объект и систему удержания направления на захваченный объект (рис. 1, а ). Они появились на борту КА и ракет и использовались с самого начала освоения космоса – уже на корабле «Восток» они были применены для выравнивания КА вдоль орбиты. Информация от большинства приборов этого поколения не обрабатывалась на борту КА, а передавалась на землю в общем потоке телеметрии. Ориентация вычислялась на земле и затем сообщалась на борт [5].

а

б


Рис. 1. Приборы ориентации на звезды:
а – прибор ориентации на полярную звезду; б – БОКЗ-МФ; в – широкопольный звездный датчик 329К; г – звездный датчик SED-26; д – звездный датчик 348К (блок оптический)

д
Fig. 1. Star orientation devices:
a – polar star orientation device; b – BOKZ-MF; c – wide–field star sensor 329K; d – star sensor SED–26; e – star sensor 348K (optical unit)
Последний этап развития рассмотренных приборов наступил с появлением матричных приемников излучения: ПЗС- и КМОП-видеоматриц. Такие ЗД привязываются не к отдельным, заранее заданным звездам, а определяют свою ориентацию по изображениям групп звезд, видимых в поле зрения прибора (рис. 1, б–д ) [6].
Области применения звездных датчиков
На сегодняшний момент существует ряд задач, которые могут решаться с помощью система ориентации КА, а именно:
-
1) определение ориентации датчика – трех углов поворота относительно некоторой системы координат;
-
2) наведение некоторого устройства, установленного на КА, – антенны, солнечной батареи, в заданное направление.
Эта задача близка к предыдущей, но требует точного перенесения ориентации от ЗД к устройству;
-
3) нанесение на некоторое изображение, например, изображение Земли, координатной сетки. Это типичная задача дистанционного зондирования Земли.
Дополнительными, но очень важными требованиями к перечисленным задачам являются точность определения координат, время, за которое эти координаты определяются, а также рабочий динамический диапазон определяемых угловых скоростей КА [7; 8].
Современные требования к системам астронавигации
Как уже было сказано выше, развитие КА аппаратов продолжается непрерывно и перед ними ставятся все более сложные задачи, увеличивается их функционал, например:
-
– необходимость использования лазеров в качестве передатчиков информации как с орбиты на землю, так и между КА. Использование маломощных лазеров с малыми углами расхождениями лучей требует наведения передатчика на приемник и его удержание с точностью лучше 0,5";
-
– современная метеорология требует получения карт облачного покрова Земли с разрешением 10 м. Для геостационарных метеоспутников это соответствует разрешению и точности ориентации не хуже 0,05";
-
– системы ориентации на быстро маневрирующих КА должны определять их ориентацию не реже чем 10 раз в секунду с точностями не хуже 0,1–1" [8].
Для выполнения поставленных задач разработчикам новых КА предъявляют более жесткие требованиями к новым ЗД.
Датчики нового поколения должны обеспечивать:
-
1) точность определения ориентации КА 0,1–0,01";
-
2) время обновления навигационной информации 10–100 мс;
-
3) определение координат и угловых скоростей при скоростях вращения КА до 15–30 °/с.
-
4) ЗД должен функционировать в широком диапазоне угловых скоростей вращения аппарата, от 0 до одного оборота в несколько секунд, и при этом обеспечивать высокую точность ориентации при малых скоростях вращения и умеренную – при больших [8].
Отработка звездных датчиков в лабораторных условиях
Один из основных этапов проектирования и разработки СОС КА является этап отработочных и автономных испытаний на аппаратно-программном стенде полунатурного моделирования. Цель данного этапа – экспериментальное подтверждение работы бортовой аппаратуры СОС в условиях, приближенных к эксплуатационным [9–11].
На сегодняшний день в АО «ИСС» для проведения данных типов испытаний КА имеется комплексно-моделирующий стенд (КМС), использующий методы как математического, так и полунатурного моделирования [12–14]. Структура и принцип построения комплексно- моделирующего стенда предоставляют возможности проверок системы, которые не могут быть достигнуты другими средствами [15].
Так как перед современными ЗД ставится широкий набор задач, а именно повышение точности определения координат при высокой скорости опроса и успешное определение координат при больших скоростях вращения КА, это приводит к необходимости модернизации средств имитации звездного неба, которые необходимы для проведения испытаний работоспособности СОС КА.
В самом начале были разработаны имитаторы звездного неба (ИЗН), которые создавали статический свет одиночной звезды. Они имитировали некий опорный ориентир на небесной сфере. Далее были разработаны ИЗН, имитирующие свет группы звезд. И те и другие ИЗН работают с помощью использования экрана с отверстиями и проекционного длиннофокусного объектива.
Затем на смену ИЗН прошлого поколения пришли ИЗН, которые осуществляли динамическую имитацию звезд с помощью монохромных дисплеев с широким динамическим диапазоном светимости, в основном изготавливаемые для медицинского оборудования. Они позволяли имитировать положение и угловые скорости звезд (рис. 2) [16].
И как завершающий этап – было создание и разработка ИЗН на основе микродисплеев (рис. 3). В таблице приведены основные характеристики существующих в составе КМС ИЗН [17; 18].
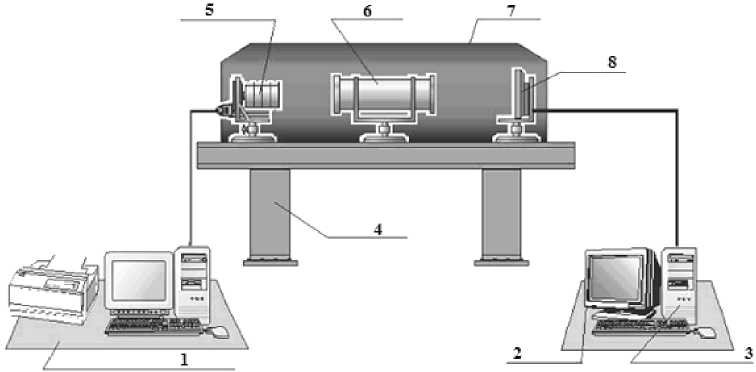
Рис. 2. Динамический стенд имитации группы звезд (ДСИГЗ):
1 – к онтрольно-испытательная аппаратура (КИА); 2 – монитор оператора; 3 – персональный компьютер со звездными каталогами; 4 – станина; 5 – испытываемый прибор (329К);
6 – коллиматорный объектив; 7 – светозащита; 8 – цифровой монитор высокой четкости
Fig. 2. Dynamic simulation stand of a group of stars (DSSGS):
-
1 – control and testing equipment (KIA); 2 – operator monitor; 3 –personal computer with star catalogs;
-
4 – bed; 5 – test device (329K); 6 – collimator lens; 7 – light protection; 8 – high definition digital monitor
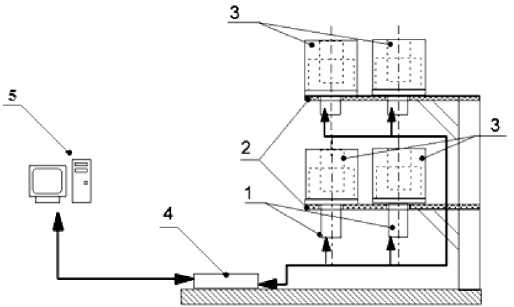
Рис. 3. Структура имитатора звездного неба на основе проекционных систем (ИЗН ПС): 1 – блок оптический звездного датчика 348К; 2 – плита установочная;
3 – оптический модуль ИЗН ПС; 4 – блок электроники звездного датчика 348К;
5 – к онтрольно-испытательная аппаратура
Fig. 3. The structure of the simulator of the starry sky based on projection systems (IZN PS): 1 – the optical unit of the star sensor 348K; 2 – the installation plate; 3 – optical module ISN PS;
4 – electronics unit of the star sensor 348K; 5 – control and testing equipment
Наблюдаемое бурное развитие технических средств виртуальной и дополненной реальности привело к непрерывному совершенствованию технологий создания микродисплеев с размером диагонали до одного дюйма, что дало возможность их использования при построении средств оптической имитации звездного неба малых размеров, достаточных для возможности закрепления их на блендах звездных датчиков. В настоящее время наблюдается переход на новые виды ИЗН, построенные на основе микродисплеев, что приводит к необходимости модернизации существующих методик проведения испытаний СОС КА, в составе которых имеются звездные датчики. Кроме этого, постоянное увеличение рабочего диапазона измеряемых угловых скоростей вращения небесной сферы звездными датчиками приводит к тому, что требуются микродисплеи все с большей частотой обновления изображения. Это вызвано тем, что с увеличением частоты обновления экрана уменьшается период, а следовательно, максимальная имитируемая угловая скорость также увеличивается, так как она равна отношению среднего углового размера звезд к этому значению периода. В настоящее время предельная частота обновления изображения микродисплея может достигать до 90 Гц, что позволяет решать большинство задач по отработке СОС КА.
Но поскольку звездные датчики постепенно начинают внедрять для получения данных о положении при повышенных скоростях вращения, относительно считавшихся до недавнего времени нормальных значений угловых скоростей, то возникает потребность в разработке метода динамического формирования изображения звездного неба, которое позволяло бы звездному датчику «видеть» вращающуюся небесную сферу на этих угловых скоростях.
Технические характеристики имитаторов звездного неба
|
ДСИГЗ для ЗД 329К |
КИА для ЗД SED 26 |
КИА для ЗД 348К |
КИА для ЗД 348К |
ИЗН ПС |
|
|
Работа с оптическими блоками ЗД одновременно |
1 |
– |
– |
2 |
4 |
|
Поле зрения |
22 ° х18 ° |
– |
– |
23 ° х23 ° |
19 ° х19 ° |
|
Диапазон имитируемых угловых скоростей КА |
Не более 1,6 град./с |
В рамках работы прибора |
В рамках работы прибора |
±1 град./с |
3 град./с |
|
Имитация участков звездного неба |
О |
Э |
Э |
О |
О |
|
Возможность работы с другими ЗД |
– |
– |
– |
+ с доработкой |
+ с доработкой |
Примечание. O – оптическая имитация, Э – электронная имитация, ОБ – оптический блок.
Заключение
Современные задачи космической навигации требуют создания нового поколения звездной ориентации, а это в свою очередь приводит к разработке методики проведения испытаний систем ориентации и стабилизации космических аппаратов с применением имитаторов звездного неба, построенных на основе микродисплеев различного типа, в которой будет использоваться метод динамического формирования изображения звездного неба с учетом особенностей работы матричных фотоприемников, используемых в ЗД СОС КА.
Данный метод позволит имитировать вращение КА со скоростями до 15–30°/с, что приведет к возможности проведения испытаний СОС современных КА.
Список литературы Испытание систем ориентации и стабилизации космических аппаратов с применением имитаторов звездного неба
- Гладыревский А. Г., Губаренко С. И. Методы и алгоритмы ориентации космического аппарата с помощью астросистемы // Exponenta Pro. Математика в приложениях. 2003. № 1. С. 60–65.
- Попов В. И. Системы ориентации и стабилизации космических аппаратов. М.: Машиностроение, 1986. 184 с.
- Ковалев Е. А., Дернов С. А Технология испытаний систем ориентации и стабилизации космических аппаратов // САКС. 2004: тез. докл. III Международ. научно-практ. конф. / СибГАУ. Красноярск, 2004. С. 97–99.
- Кононович Э. В., Мороз В. И. Общий курс астрономии. М.: Едиториал УРСС, 2004. 544 c.
- Осипик В. А., Федосеев В. И. Алгоритмы автоматического распознавания групп звезд на борту космического аппарата // Оптический журнал. 1998. № 8. С. 32–40.
- Миронов А. В. Основы астрофотометрии. Практические основы фотометрии и астрофотометрии звезд. М.: Физматлит, 2008. 258 c.
- Федосеев В. И., Колосов М. П. Оптико-электронные приборы ориентации и навигации космических аппаратов. М.: Логос, 2007. 248 с.
- Современные датчики звездной ориентации / М. Е. Прохоров, А. И. Захаров, А. В. Миронов и др. // Физика Космоса: тр. 38 Междунар. студ. науч. конф. Екатеринбург, 2009. С. 170–186.
- Строгалев В. П., Толкачева И. О. Имитационное моделирование. М.: Изд-во МГТУ им. Н. Э. Баумана, 2008. 280 с.
- Синицкий Д. Е., Дернов С. А. Разработка основных принципов использования методов полунатурного моделирования при испытаниях современных систем ориентации и стабилизации КА // Вестник СибГАУ. 2013. № 4. С. 119–129.
- Синицкий Д. Е., Федченко Д. А. Решение задач наземной экспериментальной отработки систем ориентации и стабилизации КА с использованием имитаторов обращенного типа // Актуальные проблемы авиации и космонавтики: материалы VIII Всерос. науч.-практ. конф. СибГАУ. 2012. № 8. С. 44–45.
- Барышников Н. В. МГТУ им. Н. Э. Баумана, Использование полунатурных методов моделирования при проектировании сложных лазерных оптико электронных систем // Наука и образование. 2011. № 2. 70 с.
- James J., Howell W. E. Simulator study of a satellite attitude control system using inertia wheels and a magnet / Langley Research Center. Langley Station, Humpton: Va. NASA technical note 63-21893, Oct. 1963 (http://ntrs.nasa.gov)
- Schwartz J. L., Hall C. D. The Distributed Spacecraft Attitude Control System Simulator: Development, Progress, Plans, 2003 // Flight Mechanics Symposium. Goddard Space Flight Center. Greenbelt, Maryland, October 28–30, 2003.
- Hoop H. Facilities for simulating attitude motion of a spacecraft / Research Branch Redstone Scientific Information Center Research and Development Directorate U. S. Army Missile Command Redstone Arsenal // NASA Technical report 35809-30. Alabama, 1967 (http://ntrs.nasa.gov).
- НРДК.203116.003 РЭ Динамический стенд имитации группы звезд для прибора звездного визирующего (ПЗВ). Руководство по эксплуатации.
- OSI (Optical Sky Stimulator) Jena Oprtronik [Электронный ресурс]. URL: http://www.jenaoptronik.de.
- Каталоги звездного неба [Электронный ресурс]. URL: http://www.astromyth.ru/Astronomy/Catalogs.html.
