Исследование цифровых способов формирования радиосигналов с линейной частотной модуляцией в современных радиолокационных измерителях уровня жидкости

Автор: Поваляев Сергей Валентинович
Статья в выпуске: 3 т.13, 2013 года.
Бесплатный доступ
Рассматривается применение метода прямого цифрового синтеза частоты для формирования зондирующего радиосигнала с линейной частотной модуляцией в современном радиолокационном измерителе уровня жидкости. Приведены результаты исследования влияния основных параметров цифрового вычислительного синтезатора на среднеквадратическую погрешность измерения расстояния до поверхности жидкости. Сформулированы рекомендации по выбору значений параметров цифрового вычислительного синтезатора, позволяющие минимизировать среднеквадратическую погрешность измерения расстояния в радиолокационном измерителе уровня жидкости. Работа выполнена в Научно-исследовательском институте цифровых систем обработки и защиты информации ЮУрГУ под руководством д-ра техн. наук, профессора кафедры инфокоммуникационных технологий Карманова Ю.Т.
Прямой цифровой синтез, линейная частотная модуляция, жидкость, среднеквадратическая погрешность
Короткий адрес: https://sciup.org/147154903
IDR: 147154903 | УДК: 621-37
Investigation of digital ways of formation radio signals with linear frequency modulation in modern radar liquid level gauge
The paper discusses the application of direct digital synthesis method for probe signal formation with linear frequency modulation in a modern radar liquid level gauge. The results of investigation describe influence basic parameters of direct digital synthesizer on distance root mean square error to liquid surface. Recommendations on the choice of parameter values of direct digital synthesizer that minimize distance root mean square error in the radar liquid level gauge are formulated. The paper is done in Scientific Research Institute of Digital Processing Systems and Information Security of the South Ural State University under the guidance of Doctor of Engineering, Professor of Information and Communication Technologies Karmanov Y.T.
Текст научной статьи Исследование цифровых способов формирования радиосигналов с линейной частотной модуляцией в современных радиолокационных измерителях уровня жидкости
В настоящее время в различных отраслях промышленности для оперативного бесконтактного измерения уровня заполнения технологических резервуаров широко используются радиолокационные уровнемеры, построенные на основе частотно-модулированного дальномера.
Для достижения высокой точности измерения такого прибора требуется перестройка частоты в широком диапазоне с высокой линейностью модуляционной характеристики [1–4]. Существующие аналоговые СВЧ генераторы не обеспечивают требуемой линейности перестройки частоты, поэтому актуальной задачей является исследование возможности применения цифровых способов формирования радиосигналов с линейной частотной модуляцией (ЛЧМ) в радиолокационном уровнемере.
Использование современных цифровых технологий синтеза радиосигналов позволяет формировать ЛЧМ радиосигналы с высокой линейностью и стабильными характеристиками [5–9]. Однако их применение должно основываться на исследовании зависимости точности измерения расстояния до поверхности жидкости от значения параметров цифрового синтезатора ЛЧМ радиосигнала.
Описание исследования
Для проведения указанного исследования была разработана компьютерная модель радиолокационного измерителя уровня жидкости. Формирование зондирующего ЛЧМ радиосигнала производится цифровым вычислительным синтезатором путем переноса квадратурного ЛЧМ сигнала из низкочастотной области в требуемую область частот с помощью квадратурного модулятора [10]. Оценка расстояния до поверхности жидкости вычисляется в измерительном модуле, построенном на базе спектрального метода обработки сигнала биений.
В ходе исследования с компьютерной модели снимались векторы оценок расстояния до поверхности жидкости. Полученные оценки использовались для построения зависимостей среднеквадратической погрешности (СКП) расстояния от значения параметров цифрового вычислительного синтезатора (ЦВС).
На рис. 1 приведена зависимость СКП расстояния от величины тактовой частоты ЦВС. Анализ полученной зависимости показывает, что увеличение тактовой частоты ЦВС приводит к появлению колебаний СКП расстояния. Колебания происходят относительно значения СКП расстояния, соответствующего величине тактовой частоты, выбранной несколько большей удвоенного значения верхней границы рабочего диапазона частот.
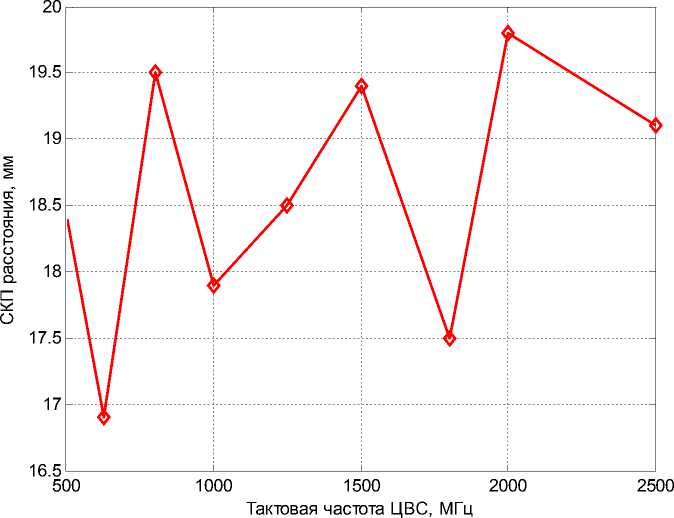
Рис. 1. Зависимость СКП расстояния от величины тактовой частоты ЦВС
Зависимость СКП расстояния от количества разрядов цифро-аналогового преобразователя ЦВС приведена на рис. 2. На графике четко выделяются две области: начальный участок, где СКП расстояния резко меняется (от 2 до 6 разрядов ЦАП) и участок, где погрешность практически не меняется при увеличении количества разрядов ЦАП (более 8 разрядов).
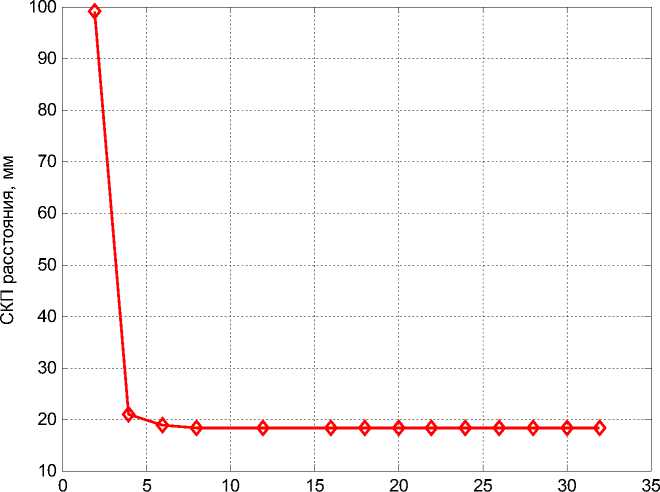
Разрядность ЦАП, бит
Рис. 2. Зависимость СКП расстояния от количества разрядов ЦАП цифрового синтезатора
На рис. 3 приведено семейство зависимостей СКП расстояния от значения частоты среза сглаживающего ФНЧ, полученное для фильтров четырех типов: Баттерворта, Чебышева, инверсного Чебышева и эллиптического. На графиках выделяются два участка. Границей между участками служит значение частоты среза, равное четверти величины тактовой частоты ЦВС. На первом участке (от 100 до 250 МГц) СКП расстояния изменяется достаточно резко. На втором участ- ке СКП расстояния меняется слабо при изменении частоты среза. В точке, соответствующей половине тактовой частоты ЦВС, достигается минимальное значение СКП расстояния.
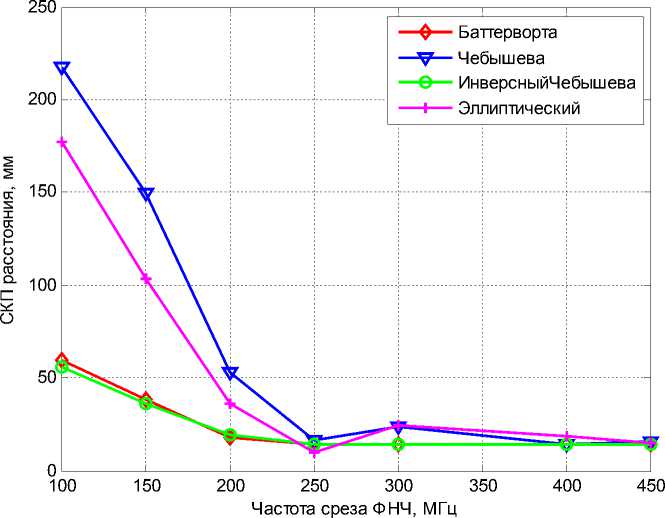
Рис. 3. Зависимость СКП расстояния от значения частоты среза сглаживающего ФНЧ
Семейство зависимостей СКП расстояния от значения затухания в полосе задерживания сглаживающего ФНЧ приведено на рис. 4. По графикам видно, что изменение величины затухания в полосе задерживания для фильтра Баттерворта и инверсного фильтра Чебышева практически не оказывает влияния на значение СКП расстояния. В то же время для фильтра Чебышева и эллиптического фильтра наблюдается возрастание СКП расстояния при увеличении величины затухания в полосе задерживания.
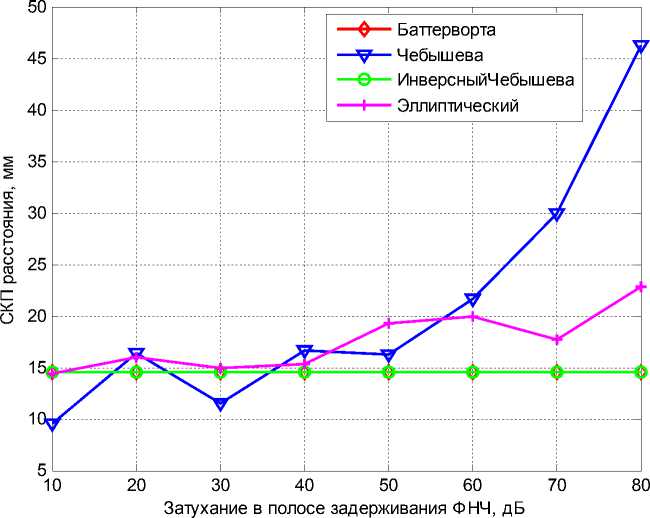
Рис. 4. Зависимость СКП расстояния от значения затухания в полосе задерживания сглаживающего ФНЧ
Выводы
На основании полученных практических результатов можно сформулировать следующие выводы и рекомендации:
-
1. Применение метода прямого цифрового синтеза частоты зондирующего ЛЧМ радиосигнала в совокупности со спектральной обработкой сигнала биений обеспечивает получение точности измерения расстояния до поверхности жидкости в резервуаре в несколько десятков миллиметров. Дальнейшего снижения погрешности измерения расстояния можно добиться путем оптимизации алгоритмов спектральной обработки сигнала биений.
-
2. Повышение тактовой частоты ЦВС приводит к появлению колебаний среднеквадратической погрешности расстояния относительно значения, соответствующего удвоенной верхней частоте рабочего диапазона. В связи с этим рабочее значение тактовой частоты ЦВС должно выбираться выше минимально допустимого и уточняться в ходе выполнения опытно-конструкторских работ.
-
3. При малых значениях числа разрядов ЦАП цифрового вычислительного синтезатора (менее 6 разрядов) наблюдается максимальная СКП расстояния. Начиная с 8 разрядов ЦАП, погрешность достигает минимального значения и практически не меняется при дальнейшем повышении разрядности ЦАП. Поэтому на практике рекомендуется использовать в цифровом вычислительном синтезаторе ЛЧМ радиосигнала ЦАП с разрядностью не менее 8 бит.
-
4. Экспериментальное исследование влияния характеристик ФНЧ разного типа на СКП расстояния показывает, что наилучшие результаты получаются при использовании ФНЧ Баттерворта. При использовании фильтров данного типа в ЦВС рекомендуется выбирать значение частоты среза фильтра вблизи значения половины тактовой частоты ЦВС. Затухание в полосе задерживания ФНЧ Баттерворта практически не сказывается на величине среднеквадратической погрешности расстояния, поэтому конкретное значение данного параметра должно выбираться исходя из соображений наименьшей сложности реализации фильтра.
Работа выполнена при поддержке гранта Промышленной группы «Метран» по теме «Исследование цифровых способов формирования радиосигналов с линейной частотной модуляцией в современных радиолокационных измерителях уровня жидкости».
Список литературы Исследование цифровых способов формирования радиосигналов с линейной частотной модуляцией в современных радиолокационных измерителях уровня жидкости
- Комаров, И.В. Основы теории радиолокационных систем с непрерывным излучением частотно-модулированных колебаний/И.В. Комаров, С.М. Смольский. М.: Горячая линия Телеком, 2010. 392 с.
- Проблема шумов и нелинейности модуляционной характеристики передатчика в прецизионных промышленных системах ближней частотной радиолокации/Б.А. Атаянц, В.В. Езерский, С.М. Смольский, Б.И. Шахтарин//Успехи современной радиоэлектроники. 2008. № 3. С. 3-29.
- Brumbi, D. Low Power FMCW Radar System for Level Gaging/D. Brumbi//IEEE MTT-S International Microwave Symposium Digest. 2000. Vol. 3. P. 1559-1562.
- Jamkiraman, M. Design of Multi-Frequency CW Radars/M. Jamkiraman. Sci Tech Publishing, 2007. 350 p.
- Методы формирования сверхширокополосных линейно-частотно-модулированных сигналов/В.Н. Кочемасов, А.В. Голубков, В.Г. Голубков и др.//Обмен опытом в области создания сверхширокополосных РЭС: материалы IV общерос. науч.-техн. конф. 2012. С. 113-124.
- Рябов, И.В. Цифровой синтез сложных широкополосных сигналов/И.В. Рябов, П.М. Юрьев//Вестник МарГТУ. 2007. № 1. С. 61-67.
- Plata, S. FMCW Radar Transmitter Based on DDS Synthesis/S. Plata//International Conference on Microwaves, Radar and Wireless Communications. 2006. -P. 1179-1183.
- Scheiblhofer, S. High-Speed FMCW Radar Frequency Synthesizer with DDS Based Linearization/S. Scheiblhofer//Microwave and Wireless Components Letters, IEEE. 2007. Iss. 5. P. 397-399.
- FPGA Controlled DDS Based Frequency Sweep Generation of High Linearity for FMCW Radar Systems/S. Ayhan, V. Vu-Duy, P. Pahl et al.//The 7th German Microwave Conference (GeMiC). 2012. P. 1-4.
- Vankka, J. Direct Digital Synthesizers: Theory, Design and Applications/J. Vankka, A.I. Halonen. Springer, 2001. 193 p.
