Исследование динамики электропривода вращателя бурового станка шарошечного бурения с нечетким управлением

Автор: Кузнецов Н.М., Морозов И.Н.
Журнал: Горные науки и технологии @gornye-nauki-tekhnologii
Рубрика: Энергетика, автоматизация и энергоэффективность
Статья в выпуске: 1 т.7, 2022 года.
Бесплатный доступ
Применение высокопроизводительных буровых станков требует особого внимания к разработке энергосберегающего электропривода при добыче полезных ископаемых открытым способом. Повышение коэффициента полезного действия и энергоэффективности бурового станка достигается при управлении электроприводом, позволяющим регулировать удельную резонансную частоту и ограничивать амплитуды тока и скорости. Основная идея работы заключается в применении нечетких регуляторов в системах автоматического регулирования режимами работы электропривода вращателя бурового станка шарошечного бурения. Использование нечетких регуляторов направлено на улучшение характеристик ПИ- и ПИД-регуляторов. Расчеты и моделирование переходных процессов с применением имитационных моделей в программном комплексе MatLab 7.11 Simulink позволили проводить достоверный анализ режимов работы электропривода вращателя бурового станка. При моделировании переходных процессов изменения скорости вращателя бурового станка с применением нечеткого регулятора обоснованы нечеткие переменные: рассогласование скорости вращения, скорость изменения рассогласования, напряжение задания по скорости. Проведенный анализ позволил установить терм-множества нечетких переменных и функции принадлежности каждому терм-множеству нечеткой переменной. Результаты выполненного моделирования показывают, что время регулирования переходных процессов изменения момента и тока двигателя вращателя при применении регулирования скорости вращателя нечетким регулятором с увеличением нагрузки в зависимости от крепости породы уменьшается в 2 раза. Внедрение системы автоматического регулирования скорости вращателя бурового станка с применением нечеткого регулятора позволяет снизить вибрацию бурового станка, обеспечить эффективную защиту двигателя вращателя от перегрузки, повысить надежность работы оборудования и производительность при бурении
Полезные ископаемые, горное дело, электропотребление, энергоэффективность, буровой станок, механизм вращателя, электропривод, автоматическое управление, регуляторы, переходные процессы, нечеткий регулятор
Короткий адрес: https://sciup.org/140293744
IDR: 140293744
Behaviour of electric drive of roller-bit drilling rig swivel head with fuzzy control
The efficient consumption of electric power in mining is an important task in power consumption optimization. The use of high-performance drilling rigs requires special attention to the development of energy-saving electric drive for open-cut mining operations. The increase of the efficiency factor and energy performance of a drilling rig is achieved through controlling the electric drive which allows the specific resonance frequency and limiting the current and velocity amplitudes to be regulated. The main idea of the study lies in the application of fuzzy controllers in the systems of automatic control of processes and equipment modes in mining production. The use of fuzzy controllers is aimed at improving the characteristics of PI and PID controllers. The calculations and simulation of transients based on simulation models in the MatLab 7.11 Simulink software package allowed reliable analysis of modes of a swivel head electric drive operation to be carried out. In the course of simulating the transients of swivel head velocity varying with the use of a fuzzy controller, fuzzy variables including mismatch of rotation velocity, mismatch change speed, velocity setting voltage were justified. The analysis allowed for the term-sets of fuzzy variables and the membership functions for each term-set of fuzzy variable to be defined. The simulation results showed that the control time (response) of transients of the swivel head motor torque and current change when using the swivel head velocity control by a fuzzy controller with increasing load depending on the rock hardness decreased by a factor of 2. Implementation of a system of automatic control of swivel head velocity with the application of a fuzzy controller allows drilling rig vibration to be reduced and provided effective protection of the swivel head electric (motor) drive from overload, thus increasing reliability of the equipment, and increasing drilling productivit
Текст научной статьи Исследование динамики электропривода вращателя бурового станка шарошечного бурения с нечетким управлением
Для создания интеллектуальных систем прогнозирования электропотребления на горных предприятиях необходимо выполнять мониторинг энерготехнологических показателей, анализ влияния показателей на потребление электрической энергии, моделирование режимов работы технологического оборудования. При разработке математических моделей процесса электропотребления необходимо применять методы и способы прогнозного моделирования потребления электрической энергии с учетом специфики организации, планирования и ведения горных работ [1, 2]. Анализ геологических, технологических и организационных факторов, влияющих на эффективность добычи в угольных шахтах [3, 4], позволяет разработать динамические и прогнозные модели энергопотребления с учетом основных временных тенденций и аддитивных составляющих в пределах, обеспечивающих устойчивый уровень энергопотребления. Например, предлагаемые в более ранних исследованиях модели определения потребляемой мощности шаровой мельницы, позволяют:
-
– произвести оценку эффективности потребления электрической энергии электроприводом мельницы;
-
– определить качественные показатели системы; контролировать график нагрузки;
-
– прогнозировать производственные циклы и пиковые значения энергопотребления; перераспределять нагрузки и анализировать изменения режима работы мельницы [5].
Внедрение автоматизированных систем мониторинга и управления производственными процессами горных предприятий с применением частотно-регулируемых электроприводов позволяет получить значительное сокращение потребления электроэнергии, снижение затрат на технологическое обслуживание и ремонт оборудования [6]. Эффективное потребле-
ние электрической энергии при добыче и переработке полезных ископаемых является актуальной задачей оптимизации электропотребления [7].
Применение высокопроизводительных буровых станков требует особого внимания к разработке энергосберегающего частотно-регулируемого электропривода при добыче полезных ископаемых открытым способом. Повышение коэффициента полезного действия буровых станков, качества электроэнергии и энергоэффективности достигается при управлении электроприводом, которое обеспечивает возможность регулировки удельной резонансной частоты и возможность ограничения амплитуд тока и скорости, используя моделирование переходных процессов с ПИД-регулятором [8, 9]. При этом именно частотно-регулируемый электропривод, используемый для регулирования скорости вращателя бурового станка, позволяет получить высокое качество механических характеристик во всем диапазоне регулирования скорости электродвигателя.
Необходимо отметить, что решения, основанные на применении фильтро-компенсирующих устройств и активных фильтров гармоник, также находят значительное распространение среди инженерных решений при решении задач повышение качества электрической энергии [10, 11, 12].
Все чаще производственники сталкиваются с необходимостью использования для автоматического регулирования режимами работы технологических процессов и оборудования горных предприятий алгоритмов и систем на базе нечеткого управления [13]. Библиотеки нечеткого управления в современных системах программирования имеют удобный графический интерфейс и позволяют корректировать вид функции принадлежности нечеткого вывода, что значительно упрощает настройку систем автоматического регулирования нечетких регуляторов и улучшает характеристики ПИ- и ПИД-регуляторов [14]. Однако
|
Таблица 1 Параметры модели системы управления электроприводом механизма вращателя бурового станка с различными типами классических регуляторов |
||
|
Параметр, элемент модели |
Функция |
Значение |
|
Токовое звено |
||
|
Передаточная функция W ( p ) |
Р W ( p ) , 1 + Т э Р |
42,07 |
|
1 + 0,066 p |
||
|
Модуль жесткости линеаризованной механической характеристики электродвигателя, β |
2 M Р - к * кр “ 0 ном |
42,07 |
|
Момент критический M к, Нм |
– |
309 |
|
Критическое скольжение, s кр |
– |
0,144 |
|
Угловая номинальная скорость двигателя ω 0 , с-1 |
2п П ®о =---- 0ном 60 |
102 |
|
Эквивалентная электромагнитная постоянная времени цепей статора и ротора двигателя T э, с |
1 |
0,066 |
|
Тэ ” 0™ 5 кр |
||
|
Угловая скорость электромагнитного поля электродвигателя ω 0эл.ном , рад/с |
2 п f to0 = — эл.ном p |
104,7 |
|
Частота питания f , Гц |
– |
50 |
|
Число пар полюсов, p |
– |
3 |
Механическое звено
|
Передаточная функция W ( p ) |
1 W ( p ) = Р Тм Р |
1 0,13 p |
|
Электромеханическая постоянная времени двигателя, Т м |
T = J м в |
0,003 |
|
Момент инерции, приведенный к валу двигателя, J , кг м2 |
0,126 |
Преобразователь частоты ( зона полюсов f 1 ≤ f 1ном = 50 ГЦ )
2022;7(1):78–88
Кузнецов Н. М., Морозов И. Н. Исследование динамики электропривода вращателя бурового станка...
расчет динамических процессов бурения довольно сложен, что затрудняет автоматизировать процесс бурения и заставляет использовать человеческие ресурсы для контроля и управления процессом. Поэтому представляется актуальной разработка систем регулирования процесса бурения с применением нечеткого регулирования.
Описание электропривода вращателя буровых станков
Регулирование скорости привода вращателя самоходных станков вращательного бурения (БСШ-1М, БСШ-2М, 2СБШ-200) осуществлялось изменением возбуждения генератора в системе генератор-двигатель с применением обратных связей по напряжению генератора и электромашинного усилителя [15]. Электроснабжение электропривода вращателя самоходного бурового станка шарошечного бурения БАШ-320 осуществлялось от трехфазного силово-
го магнитного усилителя. Питание электропривода вращателя бурового станка СБШ-250 МН обеспечи-ватся системой тиристорный преобразователь-электродвигатель постоянного тока с автоматическим регулированием скорости долота при изменении параметров бурения. В цепи управления и возбуждения системы электродвигателя вращателя используется датчик напряжения и скорости. После подачи напряжения в цепи управления и возбуждения двигателя вращателя устанавливают скорость и усилие подачи в зависимости от крепости пород. Необходимое осевое усилие на забой устанавливается ручкой регулятора давления.
Параметры модели
Параметры основных передаточных звеньев системы электропривода вращателя бурового станка определяются в соответствии с традиционной методикой и представлены в табл. 1.
2022;7(1):78–88
Kuznetsov N. M., Morozov I. N. Behaviour of electric drive of roller-bit drilling rig swivel head...
|
Окончание табл. 1 |
||
|
Параметр, элемент модели |
Функция |
Значение |
|
ПИ-регулятор скорости |
||
|
Передаточная функция Wpc ( p ) |
Д U 1 W ( p ) = —pc- = k +--- pc pc y pc p |
0,008 p +1 |
|
0,09 p |
||
|
Постоянная интегрирования Tpc , c |
T pc = k о.с k рт k пч a м T м |
0,09 |
|
Коэффициент передачи kpc |
T k = T 1 pc T T pc |
0,09 |
ПИ-регулятор тока
|
Передаточная функция Wpm ( p ) |
Wpm ( P ) = |
ди 1 pm = k +— pm y pm p |
0,06 p +1 |
|
0,03 p |
|||
|
Постоянная интегрирования Tpm , c |
T pm |
= k о.т k пч a м T м |
0,3 |
|
Коэффициент передачи kpm |
T k = T oi pm T pm |
0,2 |
Цепь обратной связи
|
Передаточная функция W о.с( p ) |
^ о.с ( P ) |
Д U о.с , = " = k о.с Дю |
|
|
Коэффициент обратной связи по скорости k с |
k с |
u о.с ном |
3,7 |
|
^ ном |
|||
|
Коэффициент обратной связи по току k т |
k т |
u = о.сном |
0,03 |
|
I ном |
|||
|
Номинальный сигнал управления u о.с ном, В |
– |
380 |
|
|
Номинальная скорость ω ном, рад/с |
– |
102 |
Асинхронный двигатель
|
, . Дю Передаточная функция W д( p ) W g ( p ) = “ Дю о |
1 Т э Т м Р 2 + T Р +1 |
||
|
1 при Т м > 4 Т э д ) ( T 01 p +1)( T 02 p + |
1 ) |
1 ( 0,008 p +1 )( 0,02 p +1 ) |
|
|
11 Малая некомпенсируемая постоянная Т оь с — = — T 01 2 T э |
,4 1 + 1 э < V Тм V |
0,008 |
|
|
Малая некомпенсируемая постоянная Т 02 , с — = T 02 2 T э |
Г /4 T 1 - J1 - V V 1 T м 7 |
0,02 |
|
Моделирование переходных процессов с ПИ-регулятором
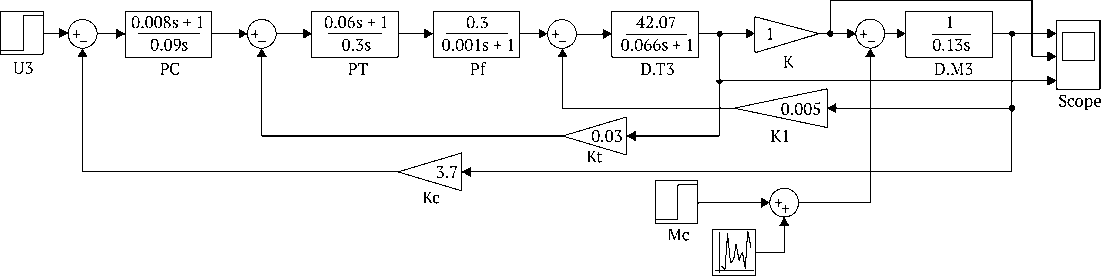
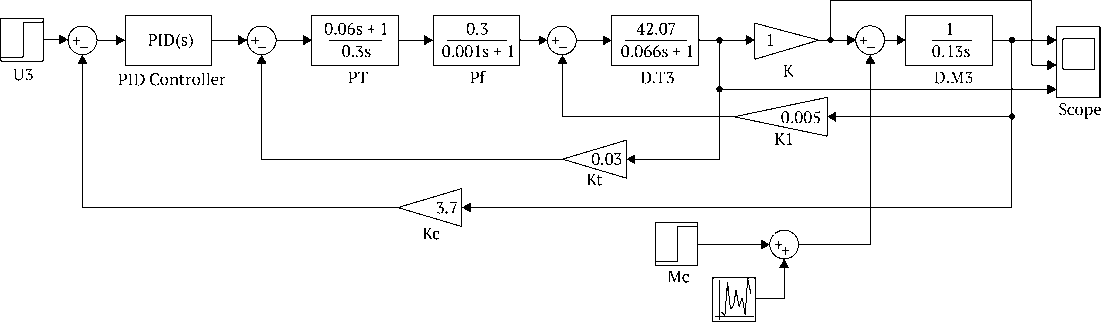
Расчет и построение переходных процессов выполнен с помощью программы MatLab 7.11 моделированием системы в программе Simulink (рис. 1).
Моделирование выполнено для следующих режимов изменения скорости вращателя бурового станка: пуск, изменение скорости по заданию на 5-й секунде, режим изменения скорости на 10-й секунде, введение переменной нагрузки на 15-й секунде. Режим наброса нагрузки представляет собой резкое изменение статического момента на валу электродвигателя. Результаты моделирования представлены на рис. 2.
Моделирование переходных процессов с ПИД-регулятором
Произведем регулирование системы с помощью ПИД-регулятора. В MatLab 7.11 есть возможность автоматического определения параметров ПИД-регулятора для заданной системы с помощью кнопки tune (настройка, регулировка), находящейся в параметрах ПИД-регулятора. При входе в блок tune мы имеем возможность ручной регулировки параметров. Сравнивая характеристики, полученные с помощью автоматической настройки и настройки вручную, выбираем наиболее выгодные для данной системы параметры регулирования ПИД-регулятора. Регулирование параметров ПИД-регулятора изображено на рис. 3.
2022;7(1):78–88
Кузнецов Н. М., Морозов И. Н. Исследование динамики электропривода вращателя бурового станка...
Mc1
Рис. 1. Модель системы в среде MatLab
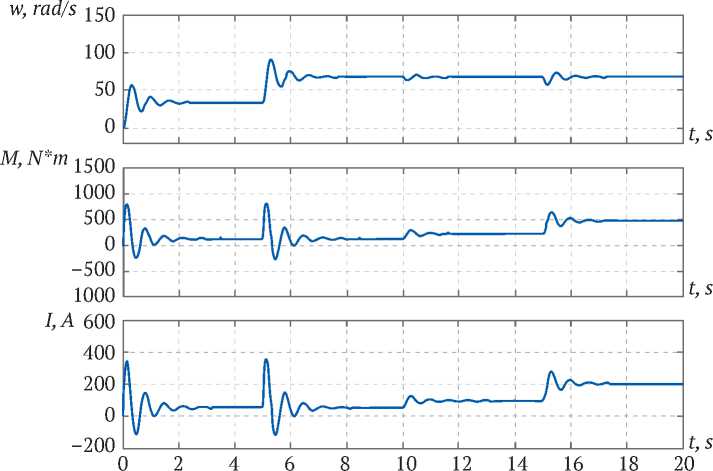
Рис. 2. Графики переходных процессов с ПИ-регулятором
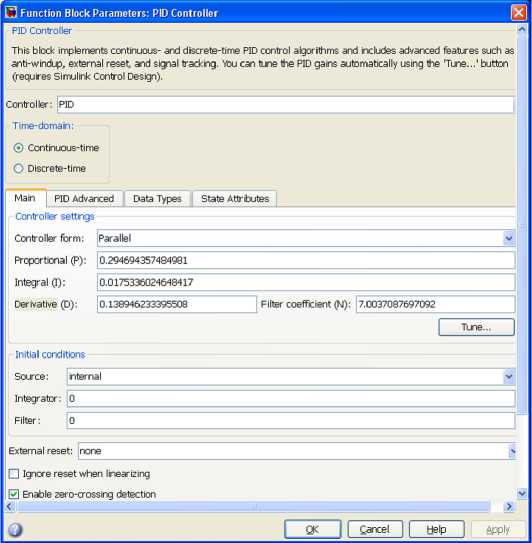
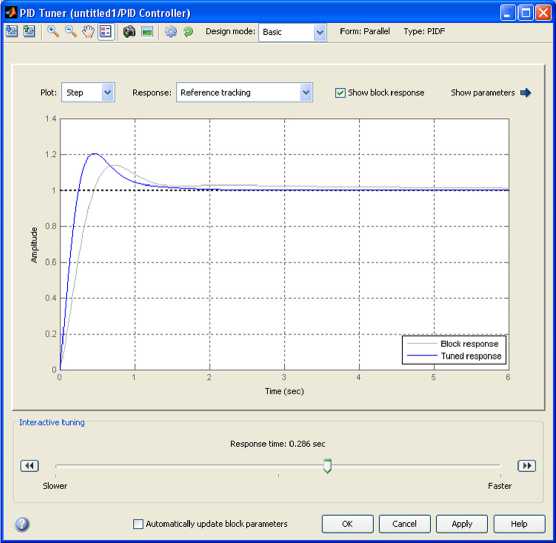
Рис. 3. Регулирование параметров ПИД-регулятора
2022;7(1):78–88
Kuznetsov N. M., Morozov I. N. Behaviour of electric drive of roller-bit drilling rig swivel head...
Моделирование выполнено для следующих режимов изменения скорости вращателя бурового станка: пуск, режим изменения скорости по заданию на 5-й секунде, режим изменения нагрузки на 10-й секунде и введение переменной нагрузки на 15-й секунде (рис. 4).
Режим наброса нагрузки представляет собой резкое изменение момента. Результаты моделирования представлены на рис. 5.
Графики переходных процессов при применении ПИД-регулятора отображают изменение скорости вращения вращателя, изменение момента, изменение тока при заданных величинах. На графиках видно, что применение ПИД-регулятора скорости намного лучше влияет на изменение характеристик по скорости, моменту и по току. Время регулирования уменьшается. Применение такого регулятора наиболее выгодно для данной системы.
Синтез нечёткого регулятора автоматического регулирования скорости вращения вращателя бурового станка
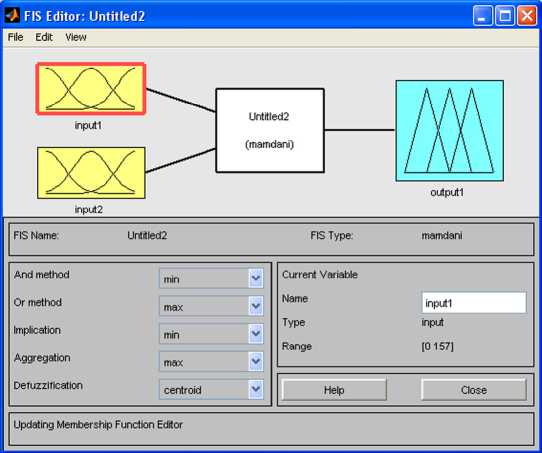
Для моделирования переходных процессов изменения скорости вращателя бурового станка с применением нечеткого регулятора вводим нечеткие переменные: рассогласование скорости вращения, скорость изменения рассогласования, напряжение задания по скорости. Определяем терм-множества нечетких переменных и задаем функции принадлежности каждому терм-множеству нечеткой переменной. Все данные функции принадлежности реализуем в редакторе функций MatLab (рис. 6).
Сигналы рассогласования скорости вращения и скорости изменения рассогласования задаем на вход нечеткого регулятора, на выходе получаем сигнал напряжения задания по скорости.
Mc1
Рис. 4. Моделирование системы в среде MatLab
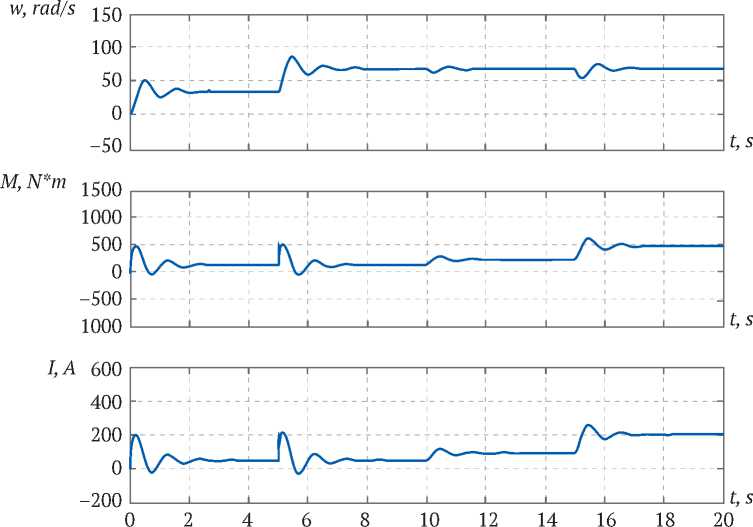
Рис. 5. Графики переходных процессов с ПИД-регулятором
2022;7(1):78–88
Кузнецов Н. М., Морозов И. Н. Исследование динамики электропривода вращателя бурового станка...
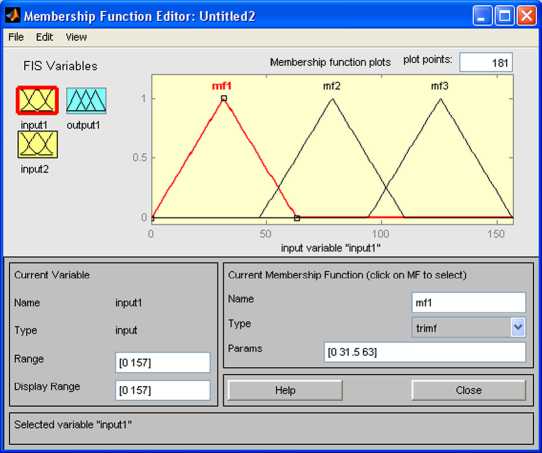
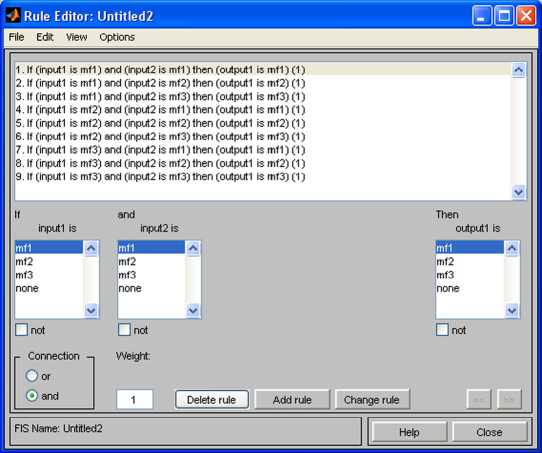
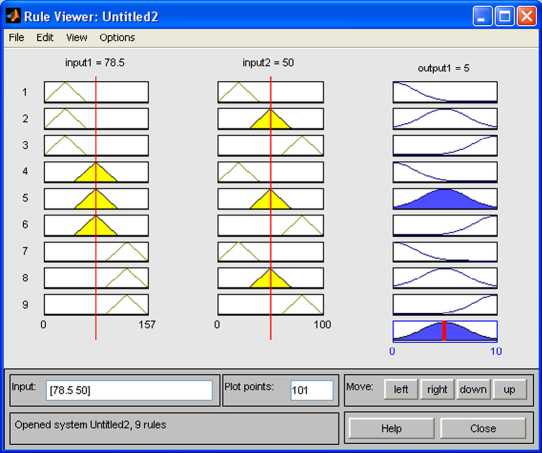
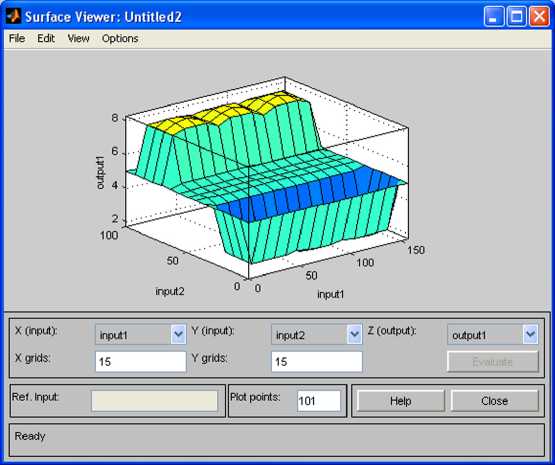
Рис. 6. Редактор составления логических правил
2022;7(1):78–88
Kuznetsov N. M., Morozov I. N. Behaviour of electric drive of roller-bit drilling rig swivel head...
Построение переходных процессов с нечетким регулятором
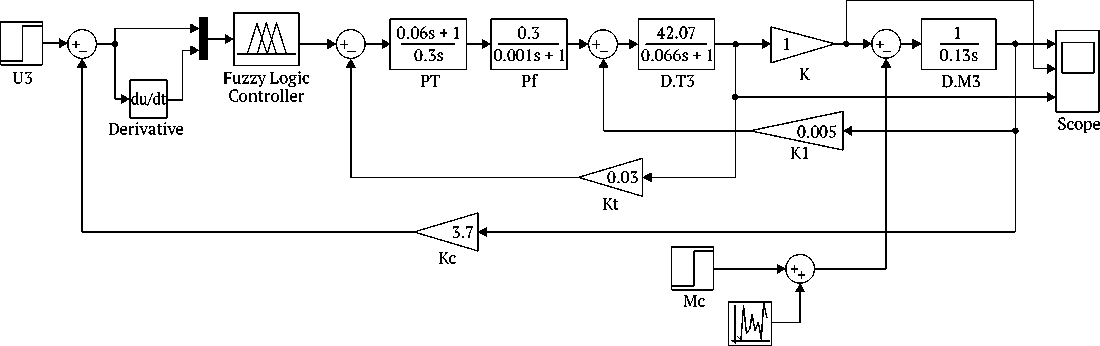
Расчет и построение переходных процессов выполняется с помощью программы MatLab 7.11 моделированием системы в программе Simulink (рис. 7).
Режимы переходных процессов для моделирования системы автоматического регулирования скорости вращателя бурового станка с нечетким регулятором были выбраны такими же, как и при моделировании с ПИ- и ПИД-регуляторами. Результаты моделирования переходных процессов при применении нечеткого регулятора при заданных режимах приведены на рис. 8.
Результаты моделирования переходных процессов для заданных режимов с различными регуляторами приведены в табл. 2.
Режим 1: переходный процесс при пуске под нагрузкой ( t = 0 с).
Режим 2: переходный процесс при увеличении сигнала задания ( t = 5 с).
Режим 3: переходный процесс при увеличении нагрузки ( t = 10 с).
Режим 4: переходный процесс при неравномерной нагрузке ( t = 15 с).
Сравнительный анализ показателей качества переходных процессов по результатам моделирования при заданных режимах систем автоматического регулирования бурового станка показывает, что при применении регулирования скорости вращателя системы управления с нечетким регулятором значительно сокращается время переходного процесса изменения тока.
Mc1
Рис. 7. Модель системы в среде MatLab с использованием регуляторов с нечеткой логикой
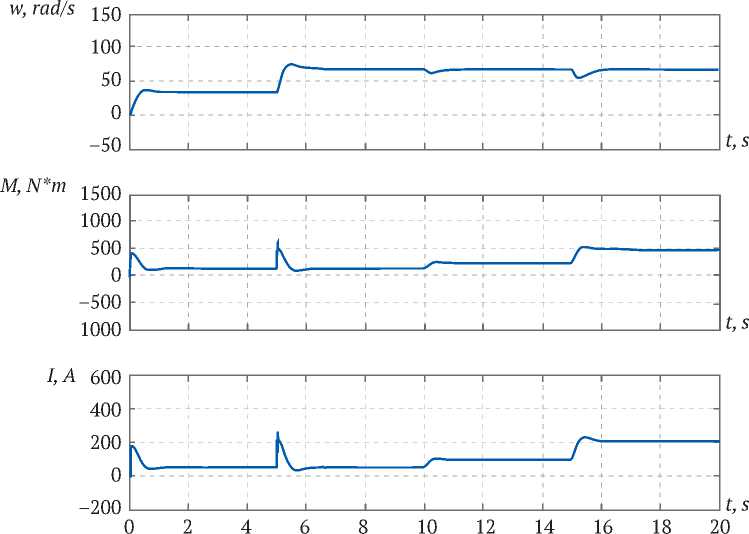
Рис. 8. Графики переходных процессов с нечетким регулятором
2022;7(1):78–88
Кузнецов Н. М., Морозов И. Н. Исследование динамики электропривода вращателя бурового станка...
Выводы
Предложенная имитационная модель электропривода вращателя бурового станка шарошечного бурения с нечетким управлением позволяет с высокой степенью достоверности оценивать динамические процессы в системе электропривода в разных режимах работы.
Результаты моделирования режимов работы вращателя бурового станка с классическими регуляторами и нечетким регулятором показывают, что время регулирования переходных процессов для заданных режимов системы автоматического управления с нечетким регулятором сокращается. Время
регулирования переходных процессов изменения момента и тока двигателя вращателя при применении регулирования скорости вращателя с нечетким регулятором при увеличении нагрузки в зависимости от крепости породы уменьшается практически в 2 раза.
Внедрение системы автоматического регулирования скорости вращателя бурового станка с применением нечеткого регулятора позволит снизить вибрацию бурового станка, обеспечить эффективную защиту двигателя вращателя от перегрузки, повысить надежность работы оборудования и производительность при бурении.
Таблица 2
Время регулирования переходных процессов
|
Режимы работы |
Тип регулятора |
Время регулирования, с |
||
|
скорости вращателя |
момента |
тока |
||
|
Режим 1 |
ПИ-регулятор |
2,3 |
2,5 |
2,4 |
|
ПИД-регулятор |
2,3 |
2,8 |
2,5 |
|
|
Нечеткий регулятор |
2,3 |
1 |
1 |
|
|
Режим 2 |
ПИ-регулятор |
2,8 |
2,4 |
2,5 |
|
ПИД-регулятор |
2,4 |
3 |
3 |
|
|
Нечеткий регулятор |
1,4 |
1,1 |
1,4 |
|
|
Режим 3 |
ПИ-регулятор |
1,4 |
1,7 |
1,9 |
|
ПИД-регулятор |
1,8 |
1 |
2 |
|
|
Нечеткий регулятор |
1,1 |
0,7 |
0,7 |
|
|
Режим 4 |
ПИ-регулятор |
1,9 |
2,1 |
1,8 |
|
ПИД-регулятор |
2 |
2 |
2,2 |
|
|
Нечеткий регулятор |
1,3 |
2 |
1,3 |
|
2022;7(1):78–88
2022;7(1):78–88
Список литературы Исследование динамики электропривода вращателя бурового станка шарошечного бурения с нечетким управлением
- Овсянников Н. Б., Пичуев А. В. Методы прогнозирования электрической нагрузки на горнодобывающих предприятиях. Горный информационно-аналитический бюллетень. 2015;(1):292–296.
- Клюев Р. В., Босиков И. И., Гаврина О. А., Ляшенко В. И. Оценка эксплуатационной надежности электроснабжения развивающихся участков добычи руд на высокогорном руднике. Горные науки и технологии. 2021;6(3):211–220. https://doi.org/10.17073/2500-0632-2021-3-211-220
- Садридинов А. Б. Анализ энергетических показателей работы горнопроходческих комплексов угольной шахты. Горные науки и технологии. 2020;5(4):367-375. https://doi.org/10.17073/2500-0632-2020-4-367-375
- Petrov V., Sadridinov A., Pichuev A. Analysis and modeling of power consumption modes of tunneling complexes in coal mines. In: E3S Web of Conferences. Vth International Innovative Mining Symposium. 18 June 2020. 2020;174:01006. https://doi.org/10.1051/e3sconf/202017401006
- Petrov V., Kuznetsov N., Morozov I. Experimental studies of energy technology indicators during ore crushing at a processing plant. In: 2020 IEEE International Conference on Advent Trends in Multidisciplinary Research and Innovation (ICATMRI). 2020. Pp. 1–4. https://doi.org/10.1109/ICATMRI51801.2020.9398320
- Егоров А. Н., Семенов А. С., Харитонов Я. С., Федоров О. В. Анализ эффективности применения частотно-регулируемого электропривода в условиях алмазодобывающих предприятий. Горный журнал. 2019;(2):77–82. https://doi.org/10.17580/gzh.2019.02.16
- Кузнецов Н. М., Щуцкий В. И. Рациональное электропотребление на горнодобывающих и горно-обогатительных предприятиях. Апатиты: Кольский научный центр Российской академии наук, 1997. 211 с.
- Фащиленко В. Н., Решетняк С. Н. Исследование резонансного режима работы электропривода горных машин. Горный журнал. 2017;(7):80–83. https://doi.org/10.17580/gzh.2017.07.15
- Фащиленко В. Н., Решетняк С. Н. Синтез электромеханической системы органов резания горных машин при резонансном режиме работы. Горный информационно-аналитический бюллетень. 2017;(S29):39–47. https://doi.org/10.25018/0236-1493-2017-12-29-39-47
- Шевырева Н. Ю. Влияние на качество электроэнергии ступенчатого фильтро-компенсирующего устройства при работе буровых установок с частотно-регулируемым электроприводом. Горный информационно-аналитический бюллетень. 2015;(1):408–415. URL: https://www.giab-online.ru/files/Data/2015/01/65_408-415_Shevyreva.pdf
- Shevyrev Y. V., Pichuev A. V., Shevyreva N. Y. Improving energy performance in networks with semiconductor converters. In: 2019 International Conference on Industrial Engineering, Applications and Manufacturing (ICIEAM). 25–29 March 2019. Sochi, 2019. Pp. 1–6. https://doi.org/10.1109/ICIEAM.2019.8743020
- До Т. Л. Исследование, оценка и предложения по решению проблемы качества электроэнергии для системы электроснабжения глиноземного завода в Лам Донге, Вьетнам. Горные науки и технологии. 2021;6(2):121–127. https://doi.org/10.17073/2500-0632-2021-2-121-127
- Кузнецов Н. М., Морозов И. Н. Синтез нечеткого регулятора производительности главной вентиляционной установки рудника. Горный информационно-аналитический бюллетень. 2018;(S48):336–345. https://doi.org/10.25018/0236-1493-2018-11-48-336-345
- Морозов И. Н., Кириллов И. Е. Использование теории нечетких множеств при построении автоматизированной системы регулирования процесса измельчения горно-обогатительных предпрятий. Труды Кольского научного центра РАН. 2016;(6–7):141–147. URL: https://cyberleninka.ru/article/n/ispolzovanie-teorii-nechetkih-mnozhestv-pri-postroenii-avtomatizirovannoy-sistemy-regulirovaniyaprotsessa-izmelcheniya-gorno
- Жуковский А. А, Нанкин Ю. А., Сушинский В. А. Привод и системы управления буровых станков для карьеров. М.: Недра; 1990. 223 с.
