Исследование динамики захвата гильзы валками пилигримового стана

Автор: Раскатов Е.Ю.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Общие проблемы машиностроения
Статья в выпуске: 1-3 т.13, 2011 года.
Бесплатный доступ
Описана методика расчета максимальных динамических нагрузок в линии привода пилигримового стана при мгновенном приложении нагрузки.
Пилигримовая прокатка, алгоритм, энергоёмкость, математическая модель, динамический момент, расчетная модель
Короткий адрес: https://sciup.org/148199688
IDR: 148199688 | УДК: 621.771.06-589.4
Research the dynamics of barrel capture by pilger mill rolls
The design procedure of maximum dynamic loadings in drive line of pilger mill is described at instant load application is described.
Текст научной статьи Исследование динамики захвата гильзы валками пилигримового стана
одной трубы) и др. На пилигримовых станах производят трубы весьма широкого сортамента и практически любого назначения: трубы нефтяного сортамента, обсадные, баллонные, котельные, трубы из специальных сталей и сплавов, биметаллические трубы разных сочетаний (для АЭС и для транспортировки сыпучих абразивных материалов), трубы спецна-значения для ВПК. Эти преимущества дают основание считать, что способ пилигримовой прокатки труб еще долгие годы будет успешно конкурировать с другими способами производства труб.
Бесшовные трубы диаметром более 406 мм с разными толщинами стенок без применения специального оборудования (гидравлических прессов и станов расширителей) можно производить только на ТПУ с пилигримовыми станами. Экономичность производства труб малыми партиями (до одной трубы) также следует отнести к достоинствам установок с пи-лигримовыми станами. Об этом также свидетельствует анализ технико-экономических показателей различных способов производства стальных труб [1]. При пилигримовой прокатке бесшовных труб цикл деформации гильзы периодически осуществляется за один оборот валков с переменным радиусом калибра, причем направление вращения валков противоположно направлению подачи гильзы. При этом особенно важно оценить условия захвата металла валками, закономерности формирования мгновенного очага деформации, и изменения скорости перемещения гильзы, а также уровень динамических нагрузок в линии привода пилигримового стана. Уравнение движения гильзы при её захвате имеет вид:
G dVr 2 g dt
= n R 2 5 ( т cos a - g sin a ) kn
где G – вес гильзы и дорна, кН; V r – скорость перемещения гильзы, м/с; R – переменный радиус бойковой части валка, м; δ – дуга соприкосновения металла с валками, рад; τ k – касательное контактное сопротивление, МПа; σ n – нормальное напряжение, МПа; α – угол захвата, рад.
Скорость гильзы и угол δ связаны зависимостью [2]:
d S
V r = R cos a —; dt
Подставив зависимость (2) в уравнение (1) по лучим дифференциальное уравнение для δ:
где dS1 dt2
+ Pi 5 = 0
12 g ( ^ n tg a - T k )
G
Общее решение уравнения (3) имеет вид
δ = с 1 sinβ 1 t + c 2 cosβ 1 t
Начальные условия : t=0, δ=0, dδ/dt=ω 0 , где ω 0 – угловая скорость валка , 1/ с . С учетом началь ных условий зависимость для определения ду ги соприкосновения металла с валками прини мает вид :
5 = ^°sin Pt(5)
Pi отсюда dS
— = dt 01 С учетом (6) зависимость для определения скорости гильзы принимает вид: Vr = R cosα ω0 cosβ1t(7) Расчет параметров механической системы пилигримового стана показал, что отношение массы якоря двигателя и маховика к суммарной массе системы, которое называют коэффициентом распределения масс, близка к единице. В связи с этим амплитуда колебаний якоря и маховика в десятки раз меньше амплитуды колебаний валка, а переходный процесс захвата гильзы валками может без больших погрешностей рассматриваться как упругие колебания приведенной массы валка относительно якоря двигателя и маховика, вращающихся с постоянной скоростью. Для одномассовой расчетной модели дифференциальное уравнение движения валка при наличии упругой связи в переходной стадии захвата имеет вид: J ip + cp = -nR 35тк (8) где J – момент инерции валка, т·м2 (кН·м·с2); φ - угол поворота валка, рад; p - угловое ускорение валка, с-2; c – жесткость упругой связи, кН·м. Подставив δ из (5) в уравнение (8) получим: o ic nR 3T^-2 P = ; с 1; h =—, N J Jp1 Общее решение дифференциального уравнения (10): ф = с1 cos pt + c2 sin pt + h P2— Pi2 sin p1t С учетом начальных условий: t=0, ф=0, & = 0 , решение уравнения (10) принимает вид: Ф = h P2 — Pi2 sin Pi t — ^sin Pt I P 7 Динамический момент крутильных колебаний MД = —9c^ 9 sin Pt -—sin Pt P2- Pi I P Исходные данные для расчета, результаты расчета на рис. 1: ω0 = 4,72 c-1, Rc = 0,27 м, J = 0,7 тм2, с = 9000 кН м, α = 15о, σn = 105 МПа, G = 1,87 +1,66 = 3,53 т, β = 113 1/с, β1 = 9,7 1/с, h = 1230 c-2, MД = 520 кН м. Рис. 1. Зависимость максимальной амплитуды динамического момента от жесткости шпинделей пилигримового стана Вывод: на основе теоретического исследования динамики захвата гильзы валками пи-лигримового стана разработана методика рас- 1. чета максимальных динамических нагрузок, 2 возникающих в линии привода пилигримового стана, при мгновенном приложении нагрузки.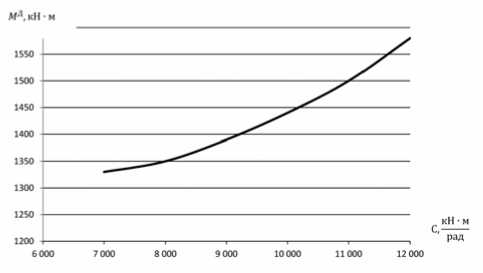
Список литературы Исследование динамики захвата гильзы валками пилигримового стана
- Тетерин, П.К. Теория периодической прокатки. -М.: Металлургия, 1978. 256 с.
- Лехов, О.С. Динамические нагрузки в линии привода обжимных станов. -М.: Машиностроение, 1975. 184 с.
- Чечулин, Ю.Б. Измерение нагрузок на шпинделях валков пильгерстана/Ю.Б. Чечулин и др.//Металлург. 2007. №6. С.47-49.
