Исследование движения космических аппаратов на низкой около круговой орбите при создании межспутниковой линии связи

Автор: Коловский И.К., Шмаков Д.Н.
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Авиационная и ракетно-космическая техника
Статья в выпуске: 4 т.20, 2019 года.
Бесплатный доступ
В работе исследуется задача организации межспутниковой линии связи (МЛС) в космической системе, которая строится на основе орбитальной группировки (ОГ) космических аппаратов (КА) на низкой около круговой орбите. Рассматривается одна из проблем при создании МЛС на такой орбите - наведение антенны КА друг на друга. Для возможности отслеживания друг друга важно размещать КА в орбитальной плоскости так, чтобы они были постоянно в зоне взаимной видимости. Анализируется дальность прямой видимости как внутри одной орбитальной плоскости, так и в соседних плоскостях. Создание МЛС рассматривается с точки зрения баллистического построения ОГ. При организации МЛС определены несколько типов характерного движения КА в соседних плоскостях: параллельного, ортогонального, встречного. Приводятся значения параметров наведения антенны МЛС. Полученные результаты построения ОГ и вычисления параметров наведения антенны могут быть актуальны для создания модифицированной системы. (Русскоязычная версия представлена по адресу https://vestnik.sibsau.ru/arhiv/)
Баллистика, дальность, низкая круговая орбита, орбитальная группировка, межспутниковая линия связи
Короткий адрес: https://sciup.org/148321940
IDR: 148321940 | УДК: 629.7.016.3 | DOI: 10.31772/2587-6066-2019-20-4-465-476
Spacecraft motion in a low circular orbit in establishing intersatellite link
The article investigates the problem of inter-satellite linking in the constellation of spacecraft in a low circular orbit. A specific problem of establishing intersatellite link (IL) in that orbit - cross-pointing of the antennae - is also studied. To support cross-tracking, it is important to place spacecraft (SC) in the orbital plane so that they are constantly in the zone of mutual visibility. The line-of-sight range is analyzed both in one orbital plane and between adjacent planes. IL is treated in terms of the orbital constellation (OC) ballistic formation. Several typical modes of motion of SC with IL in adjacent planes are determined - parallel, orthogonal, oncoming. The parameter values of IL antenna pointing are also assessed. The obtained results of OC formation and antenna pointing parameters’ calculations may be relevant for establishing a modified system.
Текст научной статьи Исследование движения космических аппаратов на низкой около круговой орбите при создании межспутниковой линии связи
Введение. Межспутниковые линии связи (МЛС) могут повысить эффективность решения целевой задачи спутниковых систем – обеспечение связью глобально расположенных абонентов. Кроме того, использование МЛС позволяет решать проблемы одновременного управления всеми космическими аппаратами (КА) в орбитальной группировке (ОГ) без использования множества наземных станций [1].
Для мониторинга и передачи данных используется несколько спутниковых систем, таких как Globalstar, Iridium. Необходимость создания и развития подобных спутниковых систем крайне важна при решении различных задач по передаче данных, управлению и поиску подвижных объектов. На базе технических решений данных систем создаются средства мониторинга [2; 3].
Задачей МЛС является обеспечение радиообмена между абонентами, не находящимися в прямой видимости одного КА, для чего необходима передача информации как между КА в одной плоскости, так из одной плоскости в другую. Применение МЛС существенно повышает эффективность радиолиний связи [4]:
-
– увеличивается зона обслуживания за счет объединения всех зон радиовидимости (ЗРВ) КА в одну общую ЗРВ орбитальной группировки;
-
– сокращается загрузка спутниковых каналов связи за счет быстрой доставки информации;
-
– повышается надежность и устойчивость спутниковых линий связи.
Организация МЛС в ОГ из 24-х КА . В данной работе возьмем экспериментальную ОГ из 24-х КА на около круговой орбите с высотой 1500 км и с точки зрения баллистического построения ОГ и движения КА будем рассматривать возможность организации МЛС спутниковой системы как внутри одной плоскости, так и между соседними плоскостями. Подобная организация МЛС уже применяется в спутниковой системе Iridium [5]. Система Iridium относится к низкоорбитальным системам на круговых орбитах. Высота орбиты около 700 км, штатная ОГ включает в себя 66 КА с МЛС [6].
При организации МЛС на круговой орбите с высотой 1500 км оптимальная взаимная видимость КА в орбитальной плоскости обеспечивается тогда, когда количество КА в плоскости больше либо равно 6 [7].
Важно отметить, что для корректной работы МЛС в одной плоскости необходимо проводить коррекцию орбиты для удержания орбитального положения всех КА, иначе дальность между КА может измениться настолько, что МЛС станет работать со сбоями.
Определим размер зоны удержания КА и порядок размещения КА в орбитальной плоскости для работы МЛС, в которой задействованы 5–7 КА. Подробнее рассмотрим взаимное расположение между КА 1 и КА 2 (рис. 1).
Орбита с высотой 1500 км
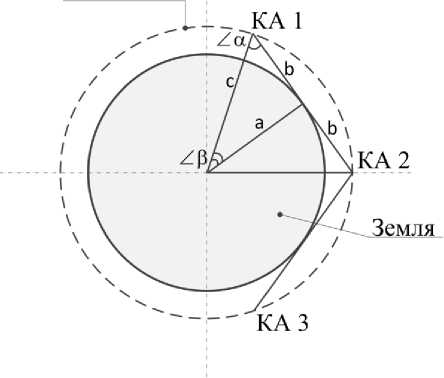
Рис. 1. МЛС внутри орбитальной плоскости
Fig. 1. IL within an orbital plane
На рис. 1 введены обозначения: a – радиус Земли; b – половина значения дальности между КА 1 и КА 2; с – большая полуось орбиты КА; ∠β – половина центрального угла между КА 1 и КА 2.
Используем основное соотношение прямоугольного треугольника [8] для вычисления 2∙∠β – предельный угол, при котором КА видят друг друга a = 6378,16 км – радиус Земли [9];
с = 1500 + 6378,16 = 7878,16 км – большая полуось орбиты КА;
sin α = a / c ;
Za = 54,056 ° ;
Ze = 35,944 ° ;
2∙ ∠β = 71,888°. (1)
По формуле (1) для различного состава КА в орбитальной плоскости получены значения угла между ближайшими КА, а также рассчитана зона удержания (табл. 1).
Таблица 1
Зона удержания КА на орбите с высотой 1500 км для работы МЛС
|
Кол-во КА в плоскости |
Размещение КА в плоскости по аргументу широты, ° |
Зона удержания, ° |
|
5 |
71,9 |
±0,5 |
|
6 |
60,0 |
±5,0 |
|
7 |
51,4 |
±9,3 |
Результаты табл. 1 показывают, что для МЛС на высоте 1500 км при пяти КА в плоскости для взаимной видимости необходимо удерживать КА на орбите с точностью 0,5° по аргументу широты, что является технически сложной задачей.
Поэтому предлагается использовать построение с 6 КА в плоскости с зоной удержания ±5 ° относительно орбитальной позиции КА. В таком случае дальность между двумя ближайшими КА при МЛС будет зависеть от точности удержания КА в орбитальных позициях по аргументу широты.
Половина значения дальности между ближайшими КА в МЛС (параметр b на рис. 1) при 6 КА в орбитальной плоскости составит b = с∙sinβ.
В случае, когда в плоскости равномерно размещены 6 КА (центральный угол между этими КА равен 60 ° ) и точность удержания орбитальной позиции ±5°, из выражения (2) получим, что дальность в номинальном положении составит 7878 км. Расчеты дальности для центрального угла 50° и 70° приведены в табл. 2.
Таблица 2
Значение дальности и центрального угла между КА внутри плоскости
|
Дальность между КА, 2∙ b , км |
Центральный угол между КА, 2* Zp , ° |
|
|
Минимальная |
6658 |
50 |
|
Номинальная |
7878 |
60 |
|
Максимальная |
9037 |
70 |
Выбранную в качестве эксперимента штатную структуру ОГ из 24-х КА для моделирования и проведения исследования баллистических параметров МЛС построим следующим образом: четыре орбитальные плоскости по 6 КА в каждой (табл. 3). Разница абсолютных долгот восходящих узлов соседних орбитальных плоскостей 46°. Фазовое распределение КА приведено на момент, когда КА 11 проходит восходящий узел орбиты.
Таблица 3
Распределение ОГ из 24 КА
|
Номер плоскости |
Номер КА |
Долгота восходящего узла, ° |
Аргумент широты, ° |
Номер плоскости |
Номер КА |
Долгота восходящего узла, ° |
Аргумент широты, ° |
|
1 |
11 |
0 |
0 |
3 |
31 |
92 |
50 |
|
12 |
0 |
60 |
32 |
92 |
110 |
||
|
13 |
0 |
120 |
33 |
92 |
170 |
||
|
14 |
0 |
180 |
34 |
92 |
230 |
||
|
15 |
0 |
240 |
35 |
92 |
290 |
||
|
16 |
0 |
300 |
36 |
92 |
350 |
||
|
2 |
21 |
46 |
25 |
4 |
41 |
138 |
75 |
|
22 |
46 |
85 |
42 |
138 |
135 |
||
|
23 |
46 |
145 |
43 |
138 |
195 |
||
|
24 |
46 |
205 |
44 |
138 |
255 |
||
|
25 |
46 |
265 |
45 |
138 |
315 |
||
|
26 |
46 |
325 |
46 |
138 |
15 |
На рис. 2 показаны 24 КА в четырех орбитальных плоскостях и трасса каждого КА в течение нескольких минут полета.
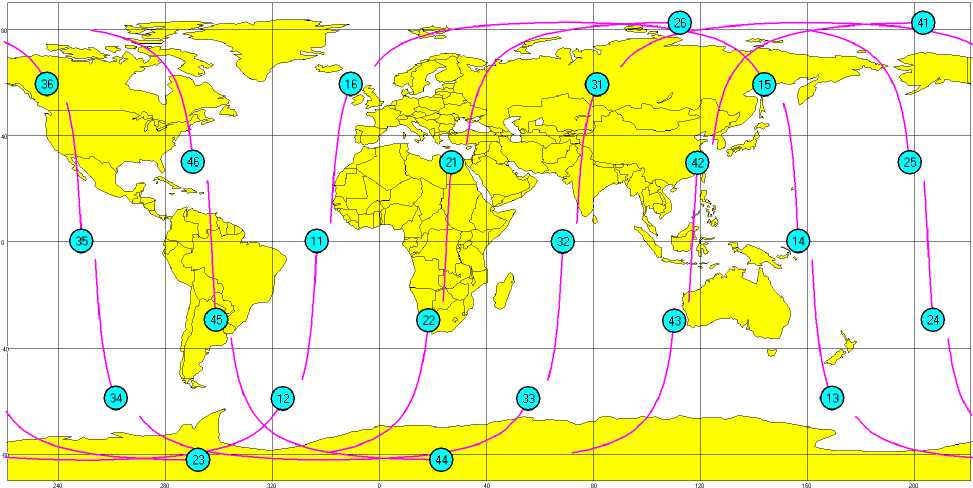
Рис. 2. Трассы ОГ из 24 КА
Fig. 2. Routes of 24 SC in the OC
МЛС является уникальным элементом системы связи Iridium, в которой каждый КА поддерживает связь с четырьмя соседними – двумя КА, расположенными спереди и сзади в той же орбитальной плоскости, и двумя КА, расположенными слева и справа в соседних орбитальных плоскостях [10].
Для экспериментальной ОГ из 24-х КА рассмотрим следующие варианты организации МЛС:
– вариант 1 – МЛС между КА внутри орбитальной плоскости;
– вариант 2 – МЛС между КА в соседних плоскостях № 1 и 2, № 2 и 3, № 3 и 4 (параллельное движение);
– вариант 3 – МЛС между КА в плоскостях № 1 и 3, № 2 и 4 (ортогональное движение в момент взаимной видимости);
– вариант 4 – МЛС между КА в плоскости № 1 и 4 (встречное движение в момент взаимной видимости).
При использовании МЛС возникает необходимость постоянного поддержания связи во время движения КА. Подобные проблемы рассматриваются в работе [11] для системы CubeSat.
Далее будет проведен анализ движения конкретных КА из каждой орбитальной плоскости экспериментальной ОГ из 24-х КА, изменение баллистических параметров для каждого из вариантов организации МЛС, включая время взаимной видимости КА.
Рассмотрены следующие баллистические параметры:
-
- дальность между КА и скорость изменения дальности;
-
- склонение и скорость изменения склонения;
-
- восхождение и скорость изменения восхождения;
-
- время взаимной видимости КА на витке.
Данные параметры позволят определить характеристики управления антенной КА при передаче информации по МЛС, а также время взаимной видимости КА, образующих МЛС.
Вариант 1 – МЛС между КА внутри орбитальной плоскости. На рис. 3 показана возможная МЛС одной плоскости, когда все ЗРВ шести КА (по углу места 10 ° ) объединены в одну общую ЗРВ орбитальной плоскости. Объединенная ЗРВ значительно увеличит зону обслуживания.
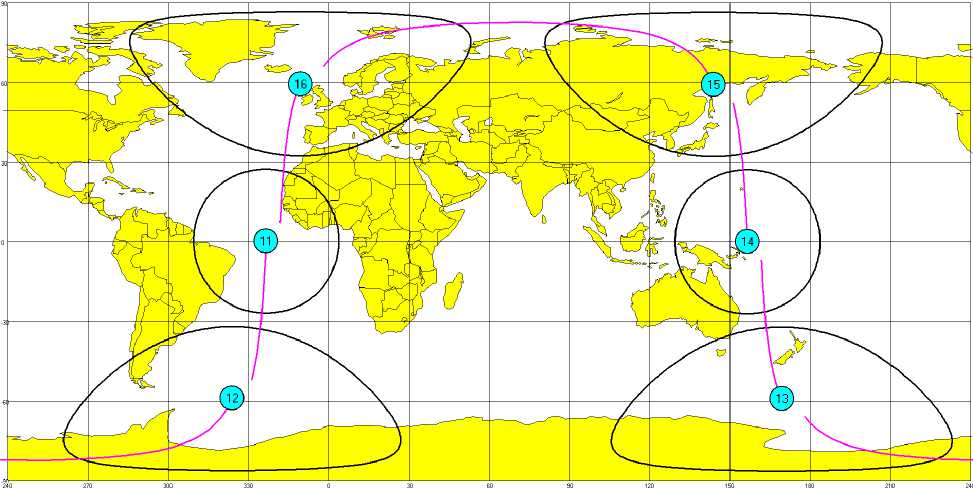
Рис. 3. Общая ЗРВ одной орбитальной плоскости при МЛС внутри плоскости Fig. 3. Common RVZ in one orbital plane with IL within that plane
Далее рассмотрим требования к аппаратуре при поддержании МЛС на примере двух ближайших КА первой орбитальной плоскости КА № 11 и 12. На рис. 4 показаны КА, их подспутниковые точки и трасса полета.
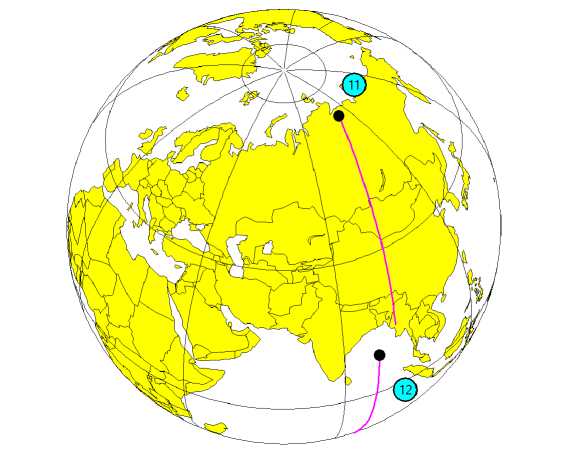
Рис. 4. Движение двух ближайших КА № 11 и 12 первой орбитальной плоскости Fig. 4. The motion of two close-positioned SC № 11 and 12 in the first orbital plane
В табл. 4 приведены исходные данные – начальные условия КА № 11 и 12. МДВ – московское декретное время в восходящем узле, координаты и скорости КА приведены в гринвичской вращающейся системе координат (ГВСК).
Таблица 4
Начальные условия КА № 11 и 12
|
Параметр |
КА № 11 |
КА № 12 |
|
Дата |
31.05.2019 |
31.05.2019 |
|
МДВ |
11:59:57 |
12:19:14 |
|
Координата Х, км |
7232,954011 |
6936,407866 |
|
Координата Y, км |
–3120,071909 |
–3714,968713 |
|
Координата Z, км |
0,0 |
0,0 |
|
Скорость Vx, км/с |
0,140334 |
0,171858 |
|
Скорость Vy, км/с |
0,325291 |
0,310911 |
|
Скорость Vz, км/с |
7,052965 |
7,060811 |
Рассмотрим передачу информации для КА № 11 на КА № 12 в номинальном положении в течение одного витка (115 мин.).
На рис. 5–7 приведем изменение баллистических параметров, где подпункт а – параметр, б – скорость изменения параметра:
– дальность – расстояние прямой видимости между КА [12]. Скорость изменения дальности;
– склонение – угол направления антенны с КА на КА, отсчитываемый от направления на центр земли. Скорость изменения склонения;
– восхождение – угол направления антенны с КА на КА, отсчитываемый от вектора
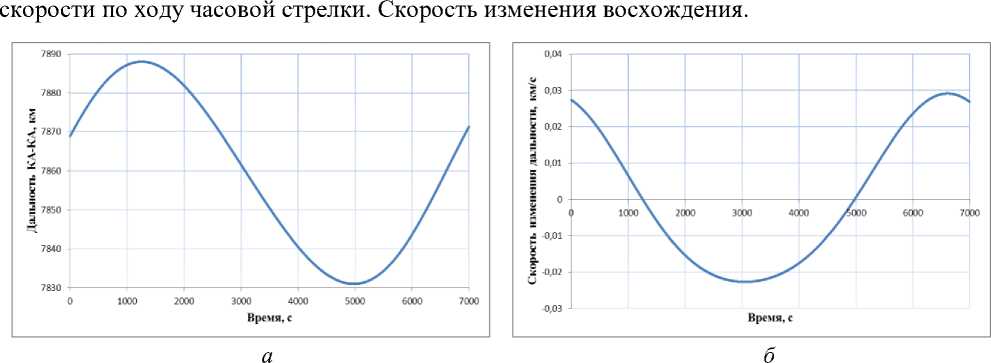
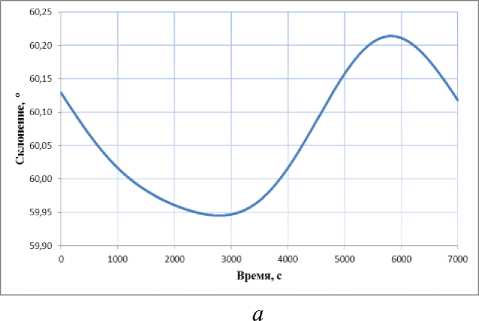
Рис. 6. Баллистический параметр «склонение»:
а – изменение склонения между КА 11 и 12; б – скорость изменения склонения Fig. 6. Ballistic parameter declination:
а – declination changing between SC 11 and 12; в – declination change rate
Рис. 5. Баллистический параметр «дальность»: а – изменение дальности между КА 11 и 12;
б – скорость изменения дальности
Fig. 5. Ballistic parameter range: а – range changing between SC 11 and 12; в – range change range
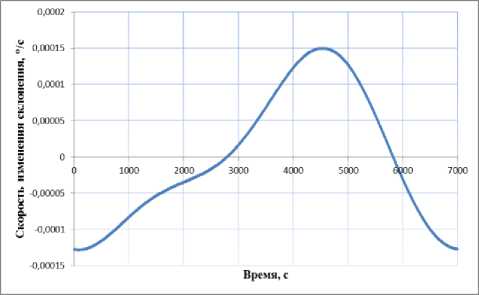
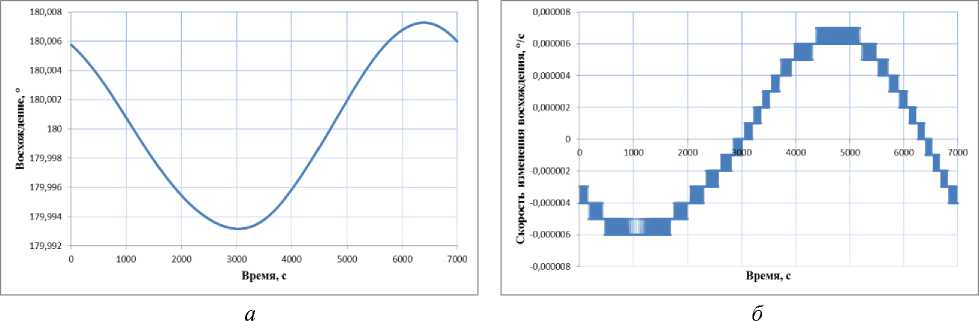
Рис. 7. Баллистический параметр «восхождение»:
а – изменение восхождения между КА 11 и 12; б – скорость изменения восхождения Fig. 7. Ballistic parameter elevation:
а – elevation change between SC 11 and 12; в – elevation change rate
Обобщим результаты расчета баллистических параметров наведения антенны КА.
Диапазон изменения параметров при МЛС за виток между КА № 11 и 12 приведен в табл. 5.
Таблица 5
Изменение баллистических параметров МЛС между КА внутри орбитальной плоскости
|
Параметр |
Диапазон изменения параметров |
|
Дальность, км |
от 6658 до 9037 |
|
Скорость изменения дальности, км/с |
от –0,03 до 0,03 |
|
Склонение, ° |
от 54,37 до 65,36 |
|
Скорость изменения склонения, °/с |
от –0,001 до 0,001 |
|
Восхождение, ° |
от 179,99 до 180,01 |
|
Скорость изменения восхождения, °/с |
от –0,00006 до 0,00006 |
|
Время взаимной видимости КА на витке, мин |
115,9 (100%) |
Следует отметить, что на витке КА № 11 и 12 постоянно находятся в зоне видимости друг друга. Об этом говорит показатель равный 100 %.
Анализ данных рис. 5–7 и табл. 5 показывает, прежде всего, стабильное значение основных параметров. Восхождение близко к 0° при передаче сигнала с КА № 12 на КА № 11 и к 180° при передаче с КА № 11 на КА № 12. Наибольшим изменениям подвержен параметр «склонение» антенн КА.
Вариант 2 – МЛС между КА в соседних плоскостях № 1 и 2, № 2 и 3, № 3 и 4. Рассмотрим организацию МЛС при движении КА в соседних плоскостях № 1 и 2 на примере КА № 12, 22, 23.
В табл. 6 приведены начальные условия КА № 22 и 23, КА № 12 – в табл. 4.
Таблица 6
Начальные условия КА № 22 и № 23
|
Параметр |
КА № 22 |
КА № 23 |
|
Дата |
31.05.2019 |
31.05.2019 |
|
МДВ |
12:09:37 |
12:28:54 |
|
Координата Х, км |
7386,336533 |
7591,458385 |
|
Координата Y, км |
2724,447324 |
2091,536252 |
|
Координата Z, км |
0,0 |
0,0 |
|
Скорость Vx, км/с |
–0,127584 |
–0,086993 |
|
Скорость Vy, км/с |
0,341148 |
0,352760 |
|
Скорость Vz, км/с |
7,055772 |
7,054474 |
На рис. 8 приведены фрагменты ОГ, состоящий из КА № 12 первой орбитальной плоскости и КА № 22, 23 второй орбитальной плоскости, на момент, когда КА находятся в районе экватора и полюса. Преимущественно на протяжении всего витка движение КА № 12 относительно КА № 22, 23 является параллельным и лишь районе полюсов трассы КА пересекаются.
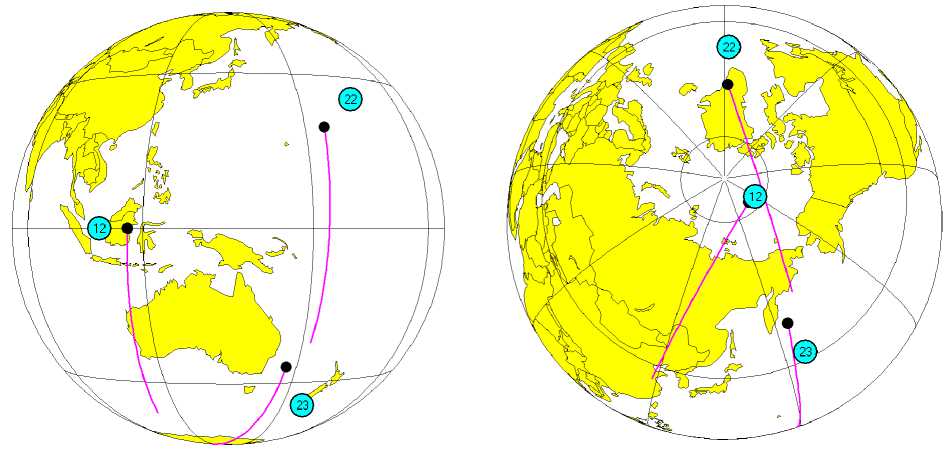
Рис. 8. Движение КА в соседних плоскостях № 1 и 2
Fig. 8. SC motion in adjacent planes № 1 and 2
Обобщим полученные результаты расчета параметров наведения антенны КА в плоскостях № 1 и 2. Диапазон изменения параметров МЛС приведен в табл. 7.
Таблица 7
Изменение баллистических параметров МЛС между КА в соседних плоскостях № 1 и 2
|
Параметр |
Диапазон изменения параметров |
|
Дальность, км |
от 3800 до 7200 |
|
Скорость изменения дальности, км/с |
от –3 до 3 |
|
Склонение, ° |
от 63 до 77 |
|
Скорость изменения склонения, °/с |
от –0,05 до 0,05 |
|
Восхождение, ° |
от –60 до 60; от 120 до 240 |
|
Скорость изменения восхождения, °/с |
от –0,4 до 0,15; от –0,15 до 0,15 |
|
Время взаимной видимости КА на витке, мин. |
115,9 (100%) |
Заметим, что рассматриваемые КА № 12, 22 и 23 находятся в зоне взаимной видимости постоянно.
Сравнение этой МЛС (табл. 7) с МЛС одной орбитальной плоскости (табл. 5) показывает возросшую динамику при изменении угла склонения и угла восхождения. Так, скорость изменения склонения увеличилась в 50 раз (0,001 и 0,05), а скорость изменения восхождения увеличилась с 0,00006 °/с до 0,15°/с.
Наилучшие условия для передачи информации возникают в районе экватора. При этом информация по цепочке может быть передана во все 4 плоскости системы.
Необходимо отметить, что для выбранной ОГ из 24-х КА на высоте 1500 км объединенная МЛС, которая включает в себя варианты 1 и 2, является самодостаточной (обеспечивает связь всех КА ОГ между собой).
Вариант 3 – МЛС между КА в плоскостях № 1 и 3, № 2 и 4. Рассмотрим организацию МЛС, при которой КА двигаются почти перпендикулярно друг другу, на примере орбитальных плоскостей № 1 и 3.
В табл. 8 в дополнение к табл. 4 приведены начальные условия КА № 31, 32, 33.
Таблица 8
Начальные условия КА № 31, 32 и 33
|
Параметр |
КА № 31 |
КА № 32 |
КА № 33 |
|
Дата |
31.05.2019 |
31.05.2019 |
31.05.2019 |
|
МДВ |
11:40:43 |
12:00:00 |
12:19:17 |
|
Координата Х, км |
2233,447140 |
2864,993939 |
3469,973938 |
|
Координата Y, км |
7544,938345 |
7337,622768 |
7062,144241 |
|
Координата Z, км |
0,0 |
0,0 |
0,0 |
|
Скорость Vx, км/с |
–0,354350 |
–0,342044 |
–0,328272 |
|
Скорость Vy, км/с |
0,099865 |
0,133551 |
0,166529 |
|
Скорость Vz, км/с |
7,059052 |
7,051298 |
7,059063 |
Взаимная видимость КА разных плоскостей здесь возникает в высоких широтах.
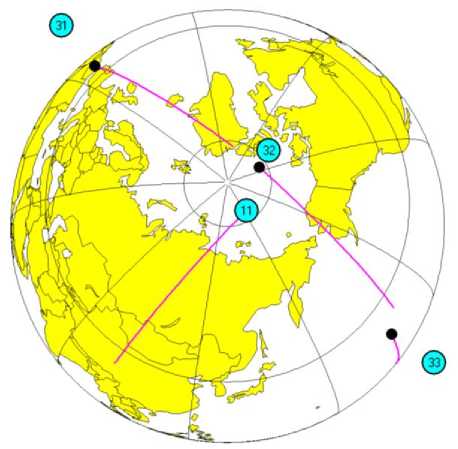
Каждый КА одной орбитальной плоскости видит от двух до трех КА другой орбитальной плоскости. Заметим, что время одновременной видимости трех КА мало. Рассмотрим МЛС на примере КА № 11 первой орбитальной плоскости и КА № 31, 32 и 33 третьей орбитальной плоскости (рис. 9).
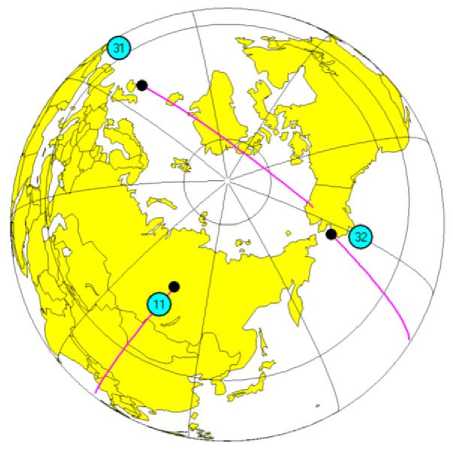
Рис. 9. Ортогональное движение КА в плоскостях № 1 и 3
Fig. 9. SC orthogonal motion in planes № 1 and 3
Изменение параметров МЛС между КА № 11 и КА № 31, 32, 33 приведено в табл. 9.
Таблица 9
Изменение баллистических параметров МЛС между КА в плоскостях № 1 и 3
|
Параметр |
Диапазон изменения параметров |
||
|
КА № 11 и 31 |
КА № 11 и 32 |
КА № 11 и 33 |
|
|
Дальность, км |
от 6000 до 9200 |
от 500 до 9200 |
от 5000 до 9200 |
|
Скорость изменения дальности, км/с |
от –6 до 6 |
от –9 до +9 |
от –6,3 до +6,3 |
|
Склонение, ° |
от 54 до 68 |
от 54 до 88 |
от 54 до 71 |
|
Скорость изменения склонения, °/с |
от –0,14 до 0,14 |
от –0,17 до 0,17 |
от –0,15 до 0,15 |
|
Восхождение, ° |
от 7 до –93; от 170 до 267 |
от 60 до –120; от 140 до 310 |
от 82 до 190; от –20 до 100 |
|
Скорость изменения восхождения, °/с |
от –0,5 до 0,05 |
от –0,18 до 0,06 |
от –0,05 до 0,55 |
|
Время взаимной видимости КА на витке, мин |
50,1 (43,2 %) |
71,1 (61,3 %) |
56,0 (48,3 %) |
При движении КА № 11 относительно КА № 31, 32 и 33 время взаимной видимости КА или время действия МЛС достаточно велико, как правило, близко к половине периода обращения.
Сравнение параметров этой МЛС (табл. 9) с МЛС одной орбитальной плоскости (табл. 5) и МЛС соседних орбитальных плоскостей (табл. 7) показывает еще более возросшую динамику при изменении угла склонения и угла восхождения. Так, скорость изменения склонения достигает величины 0,17 °/с, а скорость изменения восхождения 0,55 °/с.
Вариант 4 – МЛС между КА в плоскостях № 1 и 4. Рассмотрим организацию МЛС в плоскостях № 1 и 4. Главная особенность здесь – встречное движение КА.
За половину периода обращения КА одной орбитальной плоскости встречается со всеми КА другой орбитальной плоскости.
Динамика встречи КА зависит от широты поверхности Земли, над которой встречаются КА. При этом можно выделить три случая: экваториальная зона, средние широты и высокие широты.
Рассмотрим МЛС на примере КА № 11 первой орбитальной плоскости и всеми шестью КА четвертой орбитальной плоскости.
В табл. 10 приведены начальные условия КА № 41–46, КА № 11 – в табл. 4.
Таблица 10
Начальные условия КА № 41-46 ОГ
|
Параметр |
КА № 41 |
КА № 42 |
КА № 43 |
КА № 44 |
КА № 45 |
КА № 46 |
|
Дата |
31.05.2019 |
31.05.2019 |
31.05.2019 |
31.05.2019 |
31.05.2019 |
31.05.2019 |
|
МДВ |
11:31:05 |
11:50:22 |
12:09:40 |
12:28:57 |
12:48:20 |
13:07:37 |
|
Координата Х, км |
–4165,747 |
–3585,969 |
–2981,510 |
–2356,174 |
–1709,746 |
–1055,799 |
|
Координата Y, км |
6682,119 |
7008,555 |
7286,171 |
7513,579 |
7688,098 |
7804,910 |
|
Координата Z, км |
0,0 |
0,0 |
0,0 |
0,0 |
0,0 |
0,0 |
|
Скорость Vx, км/с |
–0,302 |
–0,324 |
–0,335 |
–0,348 |
–0,353 |
–0,359 |
|
Скорость Vy, км/с |
–0,199 |
–0,164 |
–0,139 |
–0,099 |
–0,080 |
–0,047 |
|
Скорость Vz, км/с |
7,054 |
7,055 |
7,056 |
7,054 |
7,053 |
7,052 |
Одновременно КА одной орбитальной плоскости видят от одного до трех КА другой орбитальной плоскости. На рис. 10 показано положение КА в районе экватора и полюса.
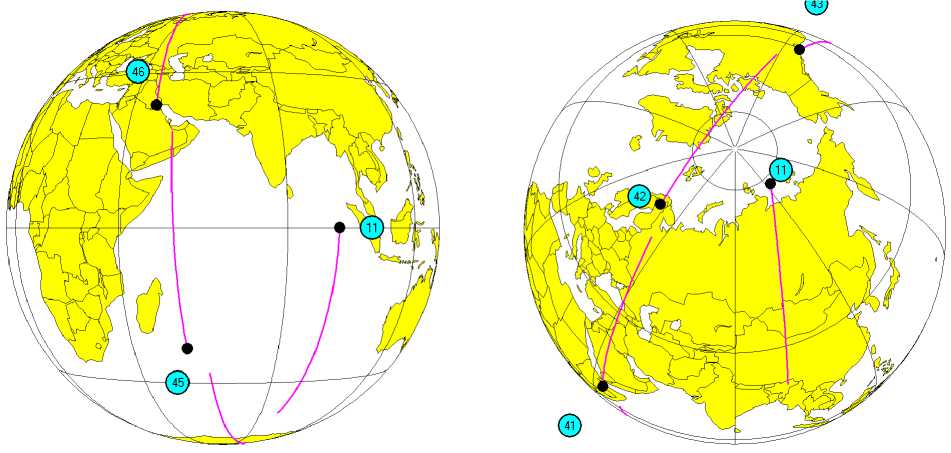
Рис. 10. Встречное движение КА плоскостей № 1 и 4
Fig. 10. Oncoming motion of SC from planes № 1 and 4
Диапазон изменения параметров МЛС между КА № 11 и всеми КА четвертой орбитальной плоскости КА № 41–46 приведен в табл. 11.
Таблица 11
Изменение баллистических параметров МЛС между КА в плоскостях № 1 и 4
|
Параметр |
Диапазон изменения параметров между КА № 11 и КА № 41-46 |
|||||
|
КА № 46 |
КА № 41 |
КА № 42 |
КА № 43 |
КА № 44 |
КА № 45 |
|
|
Дальность, км |
от 6000 до 9200 |
от 5000 до 9200 |
от 2640 до 9200 |
от 500 до 9200 |
от 3300 до 9200 |
от 5340 до 9200 |
|
Скорость изменения дальности, км/с |
от –9,0 до 9,0 |
от –9,3 до 9,3 |
от –10,3 до 10,3 |
от –12,3 до 12,4 |
от –10,1 до 10,1 |
от –9,1 до 9,1 |
|
Склонение, ° |
от 54 до 68 |
от 54 до 72 |
от 54 до 80 |
от 54 до 88 |
от 54 до 78 |
от 54 до 70 |
|
Скорость изменения склонения, °/с |
от –0,2 до 0,2 |
от –0,22 до 0,22 |
от –0,23 до 0,23 |
от –0,24 до 0,24 |
от –0,24 до 0,24 |
от –0,2 до 0,2 |
|
Восхождение, ° |
от 220 до 320 |
от 230 до 340 |
от 220 до 360 |
от 30 до 200 |
от 45 до 180 |
от 47 до 155 |
|
Скорость изменения восхождение,°/с |
от –0,65 до 0,20 |
от –0,75 до –0,15 |
от –1,4 до 0 |
от –0,1 до 0,1 |
от 0,55 до 1,15 |
от 0,18 до 0,71 |
|
Время взаимной видимости КА на витке, мин |
37,9 (32,7 %) |
41,5 (35,8 %) |
48,0 (41,4 %) |
50,5 (43,5 %) |
46,6 (40,2 %) |
40,6 (35,0 %) |
Время взаимной видимости КА № 11 и КА четвертой орбитальной плоскости меньше, чем в других ранее рассмотренных МЛС.
Сравнение этой МЛС (табл. 11) с другими ранее рассмотренными МЛС (табл. 5, 7, 9) показывает, что данный тип МЛС потребует наиболее динамичного наведения антенны КА по изменению угла склонения и угла восхождения. Так, скорость изменения склонения достигает величины 0,24 °/с, а скорость изменения восхождения 0,75 °/с.
Заключение. Анализ изменения основных баллистических параметров, которые учитываются при наведении антенн для передачи данных с использованием МЛС внутри орбитальной плоскости или в соседних плоскостях, носит различный характер. В табл. 12 приведены обобщенные диапазоны изменения основных баллистических параметров при организации МЛС в ОГ из 24-х КА (4 орбитальные плоскости, в которых по 6 КА) с высотой орбиты 1500 км.
Таблица 12
Изменение баллистических параметров при организации МЛС в ОГ из 24-х КА ____
|
Параметр |
Тип построения МЛС |
|||
|
Внутри плоскости |
Между 1 и 2, 2 и 3, 3 и 4 плоскостями |
Между 1 и 3, 2 и 4 плоскостями |
Между 1 и 4 плоскостями |
|
|
Дальность, км |
от 6658 до 9037 |
от 4000 до 7200 |
от 5000 до 9000 от 500 до 9000 |
от 500 до 9000 от 3500 до 9000 от 5500 до 9000 |
|
Скорость изменения дальности, км/с |
от –0,03 до 0,03 |
от 0 до 3 |
от –10 до 10 |
от –12 до 12 |
|
Склонение, ° |
от 54,37 до 65,36 |
от 63 до 75 |
от 55 до 90 |
от 54 до 90 |
|
Скорость изменения склонения, °/с |
от –0,001 до 0,001 |
от 0 до 0,01 |
от –0,035 до 0,035 |
от –0,05 до 0,05 |
|
Восхождение, ° |
от –0,01 до 0,01; от 179,99 до 180,01 |
от 10 до 60; от 330 до 360 |
от 300 до 360; от 0 до 120 |
от 340 до 360 |
|
Скорость изменения восхождения, °/с |
от –0,000006 до 0,000006 |
от 0,03 до 0,07 |
от –0,05 до 0,05 |
от 0 до 0,9 |
|
Время взаимной видимости КА на витке, мин |
115,9 (100 %) |
115,9 (100 %) |
от 50,1 до 71,1 (от 43,2 до 61,3 %) |
от 37,9 до 50,5 (от 32,7 до 43,5 %) |
В результате можно сделать выводы, что для наведения антенн и функционирования МЛС в орбитальной группировке необходимо учитывать приведенные выше дестабилизирующие факторы:
-
– ограниченные интервалы времени для передачи информации между КА при условии их взаимной видимости;
-
– взаимное изменение положения при высокой скорости перемещения КА.
МЛС, построенная на оптических или радиоканалах связи в спутниковой системе, обладает рядом особенностей – запас электропитания для приборов МЛС ограничен, что следует учитывать при проектировании аппаратных средств [13].
Сравнивая рассмотренные типы МЛС в экспериментальной ОГ из 24-х КА, можно отметить, что наиболее простая для реализации МЛС – межспутниковая линия внутри плоскости. При таком типе МЛС баллистические параметры изменяются в наименьшей степени и соседние КА находятся в постоянной видимости друг друга.
При организации МЛС в соседних орбитальных плоскостях ОГ потребуется применение специальной аппаратуры и антенны для динамического отслеживания одного КА другим, так как целеуказания, используемые для наведения антенны, изменяются значительно и динамично.
При этом благоприятные условия для работы МЛС – наименьшие скорости изменения параметров для наведения антенны МЛС – возникают при параллельном движении КА в соседних орбитальных плоскостях (между орбитальными плоскостями № 1 и 2, № 2 и 3, № 3 и 4).
Стоит выделить, что для улучшения потребительских характеристик ОГ из 24-х КА с точки зрения простоты реализации, достаточно применить первые два из рассмотренных типов МЛС: внутри каждой плоскости и в соседних плоскостях № 1 и 2, № 2 и 3, № 3 и 4.
После успешной реализации МЛС внутри ОГ КА на низкой круговой орбите можно рассмотреть следующий этап развития МЛС между КА, функционирующих на разных орбитах. Такой тип МЛС предложен в работах [14; 15], в которых описан вид комбинированной спутниковой системы связи, где спутник-ретранслятор, работающий на высоко эллиптической орбите, осуществляет информационный обмен с находящимися в поле его зрения КА, обращающимися по низким околоземным орбитам.
Использование полученных результатов при проектировании модернизированных КА, баллистическом построении ОГ и организации МЛС внутри ОГ, состоящей из 24-х КА, позволит создать высокопроизводительную спутниковую систему мониторинга и передачи данных.
Список литературы Исследование движения космических аппаратов на низкой около круговой орбите при создании межспутниковой линии связи
- Межспутниковые линии - важный элемент перспективных спутниковых навигационных технологий / И. А. Золкин, Е. И. Игнатович, А. Ф. Щекутьев, А. И. Болкунов // Полет. Общероссийский научно-технический журнал. 2012. № 4. С. 29-33.
- Разработка бортового устройства спутникового мониторинга воздушных судов / А. В. Кацура, А. Р. Акзигитов, А. С. Андронов и др. // Вестник СибГАУ. 2016. Т. 17, № 1. С. 125-130.
- Крылов А. М. Спутниковые системы связи и вещания. Состояние и перспективы развития. М., 2014. 182 с.
- Вечтомов В. А. Межспутниковая линия связи ММВ диапазона // Решетневские чтения: материалы XVIII Междунар. науч. конф. (11-14 ноября 2014, г. Красноярск): в 2 ч. / под общ. ред. Ю. Ю. Логинова; Сиб. гос. аэрокосмич. ун-т им. акад. М. Ф. Решетнева. Красноярск, 2014. Ч. 1. С. 63-65.
- Sanjay Kumar, Wireless Communication the fundamental and advanced concepts, Birla Institute of Technology Mesra, Ranchi, India, Published River Publishers, 2015, p. 790.
