Исследование характеристик модифицированного алгоритма сопровождения воздушной цели на проходе

Автор: Закомолдин Д.В.
Журнал: Журнал Сибирского федерального университета. Серия: Техника и технологии @technologies-sfu
Рубрика: Исследования. Проектирование. Опыт эксплуатации
Статья в выпуске: 5 т.18, 2025 года.
Бесплатный доступ
В статье на примере фильтра дальномерного канала исследован алгоритм фильтрации параметров движения воздушной цели (ВЦ) при сопровождении её на проходе, синтезированный на основе уравнений аналогово-дискретной фильтрации, учитывающий изменяющееся отношение сигнал/шум на входе приёмника бортовой радиолокационной системы (БРЛС) при различных значениях параметров фильтра. На основе анализа результатов моделирования установлена возможность повышения точности оценивания и предотвращения расходимости фильтрации координат состояния в фильтре дальномерного канала за счёт учёта увеличивающейся в процессе сближения перехватчика с ВЦ энергии переотражённого сигнала. Реализация предложенного подхода позволит повысить потенциальную точность оцениваемых координат состояния и предотвратить расходимость фильтрации в дальномерном канале при работе БРЛС перехватчика в режиме сопровождения на проходе.
Сопровождение на проходе, аналогово-дискретная калмановская фильтрация, точность фильтрации, энергия переотражённого сигнала
Короткий адрес: https://sciup.org/146283150
IDR: 146283150 | УДК: 621.39
Investigation of the Characteristics of a Modified Algorithm for Tracking an Aerial Target in Transit
In the article, using the example of a rangefinder channel filter, an algorithm for filtering the motion parameters of an airborne target (AT) when escorting it through the aisle is studied, synthesized on the basis of analog-discrete filtering equations, taking into account the changing signal-to-noise ratio at the input of the receiver of the on-board radar system (radar), at different values of the filter parameters. Based on the analysis of the simulation results, it is established that it is possible to increase the accuracy of estimation and prevent the divergence of filtering the coordinates of the state in the rangefinder channel filter by taking into account the energy of the reflected signal increasing during the approach of the interceptor to the AT. The implementation of the proposed approach will increase the potential accuracy of the estimated coordinates of the state and prevent the divergence of filtering in the rangefinder channel when the interceptor radar is operating in the escort mode on the passage.
Текст научной статьи Исследование характеристик модифицированного алгоритма сопровождения воздушной цели на проходе
В [1, 2] представлены результаты синтеза методов наведения пары перехватчиков в составе атакующего перехватчика с задачей поражения ВЦ и перехватчика прикрытия с задачей прикрытия атакующего перехватчика. Данные методы с разной, как показано в [3], степенью эффективности решают задачу скрытого самонаведения атакующего перехватчика в зону возможного пуска ракет. Кроме того, в [1, 2] определено требуемое для практической реализации данных методов информационное обеспечение. Установлено, что в качестве такого информационного обеспечения выступает перечень оценок параметров движения ВЦ (координат состояния), формируемых в информационной вычислительной системе на выходе фильтров дальномерного и угломерного каналов.
В [4–6] отмечено, что одним из основных режимов работы информационной системы перехватчиков является режим автоматического сопровождения целей при сохранении обзора, который предполагает необходимость непрерывного формирования оценок координат состояния сопровождаемой ВЦ при достаточно редком (дискретном) поступлении сигналов, отражённых от неё. Реализация такого режима для предотвращения расходимости процесса фильтрации – 614 – обязует использовать алгоритмы аналогово-дискретной фильтрации, в которых экстраполяция осуществляется с малым шагом Td, по своей точности приближаясь к аналоговому прогнозу, а коррекция результатами измерений с большим интерваломT^Td. Данные алгоритмы в общем случае для процесса
x(k) = Ф(^,к - l)x(k -1) + ^х(к -1),(1)
при наличии измерений
z(£) = Qs(£)[H(£)x(£) + ^^^(2)
позволяют сформировать оценки по правилу [6, 12]:
ад = хэ(£) + Кф(£)ад - ОД£)Н(£)хэ(Шх(0) = х0,(3)
хэ (к) = Ф(^, к - 1)х(£ -1),(4)
Ktffl = D(4)H,(i)D;l(i)(5)
D(fc) = [е - Q. (£)Кф (£ - l)H(i)] D э (П D(0) = Do,(6)
D э (к) = Ф(£, к - 1)D(^ - 1)ФТ (к, к-1) + DY (к -1),(7)
где x – вектор координат состояния; х – вектор оценок координат состояния; xэ – экстраполированные значения вектора координат состояния; Kф – переменный матричный коэффициент усиления; z – вектор измерений компонент вектора состояния;
Е, при к = nT/Td, /? = 1,2,3... О, при к^пТ I Td
Qz – матрица признака прихода измерений вида QzW = причём ^ » ^d; Td – шаг (временной интервал) работы фильтра (оценивания); T – временной интервал между обращениями к цели (поступления результатов измерений); H – матрица связи векторов наблюдения и состояния; Ф – переходная (фундаментальная) матрица состояния; D – апостериорная ковариационная матрица ошибок фильтрации; Dэ – априорная ковариационная матрица ошибок фильтрации; Dи – ковариационная матрица шумов измерений; E – единичная матрица; – ковариационная матрица шумов возмущений; ξx, ξи – центрированные векторы гауссовских возмущений состояния и измерений с известными дисперсиями Dx и Dи; «•T» – операция транспонирования; «•–1» – операция вычисления обратной матрицы.
Кроме того, очевидно, что в процессе сближения перехватчика с работающей БРЛС с сопровождаемой ВЦ при реализации режима сопровождения на проходе в соответствии с алгоритмом, описываемым уравнениями (3) – (7), происходит увеличение энергии сигнала, пе-реотражённого от сопровождаемой ВЦ. Это приводит к увеличению отношения сигнал/шум на входе приёмника БРЛС. Такое увеличение отношения сигнал/шум в процессе сближения с сопровождаемой ВЦ может быть использовано в интересах повышения точности формируемых оценок координат состояния ВЦ [8]. Одними из широко применяемых показателей точности являются потенциальная дисперсия фильтрации (оценивания), вычисляемая решением уравнения Рикатти (6), и реальная дисперсия фильтрации. Учёт в общем случае изменяющегося, а в рассматриваемой задаче сближения перехватчика и ВЦ увеличивающегося отношения сигнал/шум на входе приёмника БРЛС реализуется посредством пересчёта на каждом шаге работы алгоритма (3) – (7) численных значений элементов матрицы шумов измерения Dи в выражении (5), характеризующих точность измерителя [6].
Наряду с этим анализ открытых публикаций [8, 10, 11] свидетельствует о недостаточном рассмотрении вопросов повышения точности формируемых оценок координат состояния ВЦ при сопровождении её на проходе за счёт учёта изменяющегося отношения сигнал/шум на входе приёмника БРЛС.
Цель статьи – исследовать на примере фильтра дальномерного канала влияние изменяющегося отношения сигнал/шум на входе приёмника БРЛС в процессе сближения перехватчика с ВЦ, а также сопутствующих параметров фильтра на потенциальную и реальную точность алгоритма фильтрации параметров ВЦ. Под сопутствующими параметрами фильтра понимается время поступления измерений, разрешающая способность по дальности и разрешающая способность по скорости.
Фильтр дальномерного канала
Исследуемый фильтр дальномерного канала, синтезированный с применением уравнений
-
(3) – (7) на основе модели функционально связанных дальности, скорости и ускорения вида [6]:
ДДА = Д(к-1ДТД\к-Д Д(О) = до
= }Дк) = V(k -1) + ДДк - 1), К(0) = Vo
а(к) = (1 - аД )Дк -1) + Дпа (к), ДО) = а0
и модели измерений вида:
z^k) = Qz^k)^(k) + v„ai^k)]^ zv{k) = Qz^k)[V(k) + n^^
позволяет формировать оценки данных координат в соответствии с правилами [6]:
|
Жк) = Ж (к) + Кф1Д^ЛгДкД Кф12 (k)Azr (к), |
ЖО) = До |
||
|
Чк) = ^#) + КфЖкЖдЖ) + Кф22<к^Ж), |
v^ = v0 |
(10) |
|
|
Дк) = сДк) + КфДк)ЛгДк) + КфзДк)АгДк), |
o(0) = flo. |
||
|
где |
'Ьгд(к) = гд(к)^дДДДЖЖ ^zv(k) = zv(k)-QzV(kW}^ |
(11) |
|
|
– невязки по дальности и скорости, |
|||
|
ДДк) = ДЖ-Г) + Т(1У(к-1) |
|||
|
ДДЖ = Жк-^ + Тда(к-^ |
(12) |
||
|
а3 (к) = (1 - aTd) а(к -1) |
|||
-
– экстраполированные значения координат состояния, вычисляемые по правилу (4).
В выражениях (8)-(12) координаты состояния Д, V, α – соответственно дальность от атакующего перехватчика до ВЦ, скорость её изменения и ускорение. Дальность от атакующего перехватчика до ВЦ и скорость её изменения, используемые в методах наведения, измеряются – 616 – в БРЛС перехватчика на основе измерений времени задержки зондирующего сигнала и доплеровской «добавки» частоты соответственно. Ускорение, которое может быть использовано для повышения точности прогнозирования координат состояния непосредственному измерению в БРЛС не подлежит; Д0, V0, α0 – начальные значения соответствующих координат состояния; Дэ, Vэ, αэ – экстраполированные значения соответствующих координат состояния; k – шаг работы; α – траекторный статистический коэффициент, характеризующий маневренные свойства атакующего перехватчика и ВЦ; QzД, QzV – элементы матрицы признаков формирования соответствующих измерений; zД, zV – соответственно измеренные значения дальности и скорости; nизм.Д, nизм.V – соответственно шумы измерений дальности и скорости; Kфij – элементы матрицы коэффициентов усиления невязок, вычисляемые в соответствии с выражением (5) с учётом выражений (6), (7).
В общем случае матрица шумов измерения D и (k) в составе выражения (5) – это диагональная матрица, элементами главной диагонали которой являются дисперсии шумов измерителей. Таким образом, в рамках решаемой задачи при использовании модели измерений (9), с учётом того что измерению подлежат дальность и скорость, матрица шумов измерений имеет вид:
DJ =
аД/д(^
О
о
aV/q(k);
где и – соответственно дисперсии измерения дальности и скорости, при определённом отношении сигнал/шум, причём численные значения данных показателей могут быть вы- числены в соответствии с выражениями
°д1д(к) = 5Д2 lq(k)
(14) a2/q(k) = 3V2/q(k)
где δД и δV – соответственно значения разрешающих способностей по дальности и скорости, а q – в общем случае изменяющееся, а в рассматриваемой задаче перехвата на встречных курсах увеличивающееся в процессе сближения с сопровождаемой ВЦ отношение сигнал/шум на входе приёмника БРЛС атакующего перехватчика.
Таким образом, на каждом шаге работы алгоритма фильтрации параметров ВЦ при работе БРЛС перехватчика в режиме сопровождения ВЦ на проходе, кроме вычислений (3)-(7) требуется в интересах повышения точности формируемых оценок координат состояния за счёт учёта увеличивающейся энергии переотражённого сигнала выполнять перечень следующих вычислений. Во-первых, исходя из численных значений разрешающей способности по соответствующей координате и текущего значения отношения сигнал/шум рассчитывать в соответствии с (14) дисперсии шумов измерений, являющихся элементами матрицы дисперсий шумов измерений (13), во-вторых, на каждом шаге работы фильтра (3)-(7) рассчитывать коэффициент усиления в соответствии с (5) с учётом обновленной матрицы дисперсий шумов измерений (13).
Следует отметить, что данный факт несколько усложняет работу алгоритмов фильтрации, так как при фильтрации параметров движения ВЦ в соответствии с классическими представлениями (без учёта изменяющегося отношения сигнал/шум) вычисления уравнений (5)-(7) выполняются до устоявшегося режима его работы, после чего численные значения коэффициентов (5) усиления невязки запоминаются и оценка формируется на основании (3)-(4).
Исследование эффективности алгоритмана основе моделирования
Исследование характеристик алгоритма фильтрации параметров ВЦ (10)-(12), учитывающего изменяющуюся в процессе наведения перехватчика принятую энергию переотражённого зондирующего сигнала посредством пересчёта на каждом шаге работы D И( k ) в соответствии с (13), (14), при различных интервалах поступления измерений T (элементы матрицы Q в выр. 11) проведено в два этапа:
-
1. Исследование точностных характеристик алгоритма фильтрации параметров ВЦ при сопровождении её на проходе при различных интервалах времени поступления измерений Т. Величина поступления измерений в такой постановке может определяться важностью цели или режимом работы БРЛС (сопровождение, подсвет ВЦ при наведении ракеты и т.д.). В качестве показателей точности определены потенциальная и реальная дисперсии оценивания. Потенциальная дисперсия оценивания рассчитывалась в соответствии с (6) для всех координат состояния, а реальная дисперсия оценивания рассчитывалась в качестве примера для значений дальности в соответствии с выражением вида:
-
2. Исследование характеристик алгоритма фильтрации параметров ВЦ при сопровождении её на проходе и пересчёте на каждом шаге работы алгоритма матрицы шумов измерений в интересах оценки влияния величины принятой энергии переотражённого зондирующего сигнала на потенциальную и реальную дисперсию оценивания, а также дисперсию шумов измерения при фиксированном значении Т. При этом потенциальная дисперсия оценивания вычисляется в соответствии с (6), реальная дисперсия оценивания вычисляется в соответствии с (15), а дисперсия шумов измерения вычисляется в соответствии с (13)-(14). Кроме того, произведено исследование характера поведения коэффициента усиления невязки измерения в процессе сопровождения, вычисляемого в соответствии с (5).
о^^Дш^-Д))1 , (15)
где J – количество реализаций. Дополнительно для значений дальности проведено исследование влияния сопутствующих параметров на реальную дисперсию фильтрации. В частности, исследовано влияние разрешающих способностей по дальности и скорости, вычисляемых в соответствии с (14), на величину реальной дисперсии.
Общая методика исследования
-
1. Для проведения двух этапов исследования моделировался процесс перехвата на встречном курсе ВЦ и проводилось оценивание в соответствии с (10)-(12), с учётом (5)-(7), в процессе наведения в БРЛС перехватчика дальности ( д ) до ВЦ, скорости взаимного сближения ( V ) и ускорения ( ci ).
-
2. В качестве модели полёта перехватчика и ВЦ использовались дискретные модели, связывающие приращение положения со скоростью и курсом, которые в проекциях на оси горизонтальной плоскости декартовой системы координат XOY имеют вид [5]:
-
3. Далее на основе моделей перехватчика и ВЦ (16) рассчитывались численные значения параметров их взаимного расположения в соответствии с уравнениями вида:
-
4. Полученные в соответствии с (17) численные значения параметров взаимного расположения перехватчика и ВЦ использовались в (9) для формирования результатов измерений. Временные интервалы прихода измерений, характеризуемых элементами матрицы Q z (выр.11), определяются в рассматриваемой постановке временной диаграммой работы БРЛС, которая в общем случае зависит от количества обслуживаемых ВЦ, характера данного обслуживания (сопровождение, подсвет цели для наведения ракет и т.д.) и зоной обзора. В процессе моделирования исследовалась потенциальная точность для временных интервалов между обращениями к цели Т 1 =5с, Т 2 =3с, Т 3 =1с.
-
5. Дополнительно в интересах оценки влияния сопутствующих параметров (разрешающей способности по дальности и скорости) на реальную дисперсию оценивания в соответствии с (14) рассчитывались элементы матрицы шумов измерений для:
-
– различных значений разрешающих способностей по дальности, в частности 15 м, 150 м и 1500 м для длительностей импульса 0,1 мкс, 1 мкс и 10 мкс соответственно;
-
– различных значений разрешающих способностей по скорости, в частности 0,2 м/с, 2 м/с и 4 м/с для значений ширины узкополосного доплеровского фильтра 10 Гц, 100 Гц и 200 Гц соответственно при длине волны 4 см.
-
6. На основе полученных измерений в соответствии с (10)-(12) формировались оценки соответствующих координат состояния без учёта п. 5 (при исследовании влияния времени поступления измерений на точность оценивания) и с учётом п. 5 (при исследовании влияния сопутствующих параметров). Причём при исследовании влияния разрешающей способности по дальности на реальную дисперсию оценивания значение разрешающей способности по скорости принималось постоянным и равным 0,2 м/с, а при исследовании влияния разрешающей
-
7. На каждом шаге моделирования (без учёта п. 5) оценивались следующие переменные:
ХП (k) = xn (к- D + ТЛ (к) cos wn (к-1) + ^хп (к), хп (0) = xfl0 У» (к) = У» (к-1) + TdVn (к) sin щп (к-1) + ^уп (к), уп (0) = у„0 хч (к) = хц (к- ^ + TdVlf (к) cos у/ц (к-1) + ^хц (к), хц (0) = х//0 Уц (к) = Уц (к-1) + TdV4 (к) sin у/ц (к-1) + ^уц (к), уц (0) = уц0.
где ( x n , y n ) и ( x ц , y ц ) – соответственно координаты положения перехватчика и цели; ( x n0 , y n0 ) и ( x ц0 , y ц0 ) – соответственно начальные значения координат положения перехватчика и цели; V n и V ц – соответственно скорость перехватчика и цели; ψ n и ψ ц – соответственно курс перехватчика и цели; ξ xn, ξ yn, ξ xц, ξ yц – центрированные гауссовы шумы, характеризующие случайные возмущения перехватчика и цели.
Необходимо отметить, что численные значения Д ( k ) и V ( k ) в интересах проведения моделирования при использовании их для формирования результатов измерений в (9) рассчитывались в соответствии с (17), однако при реальной работе БРЛС перехватчика в режиме сопровождения на проходе данные значения вычисляются на основании измерений времени задержки зондирующего сигнала и доплеровской «добавки» частоты соответственно.
способности по скорости на реальную дисперсию оценивания значение разрешающей способности по скорости принималось постоянным и равным 150 м.
-
– в соответствии с уравнением Рикатти (6) рассчитывалась потенциальная дисперсия формируемых оценок при различных временных интервалах прихода измерений z ( k ). Причём исходя из характера решаемой задачи (размерности вектора состояния 3х1, т.к. текущее оцениваемое состояние описывается тремя параметрами Д , V , α ) апостериорная ковариационная матрица ошибок фильтрации D в выражении (6) имеет размерность 3х3, элементы главной диагонали которой D Д , DV, Dα являются значениями потенциальной дисперсии оценивания соответственно дальности, скорости и ускорения;
-
– в соответствии с уравнением (15) рассчитывалась реальная дисперсия оценивания для различных интервалов прихода измерений;
-
– в соответствии с (5) на основе вычисленных элементов матрицы потенциальных дисперсий фильтрации (6) и обратных элементов матрицы шумов измерения, вычисленных на основе (13), вычислялись элементы матрицы коэффициентов усиления невязки измерения (на втором этапе).
-
8. На каждом шаге моделирования (с учётом п. 5) оценивались следующие переменные:
-
– в соответствии с уравнением (15) рассчитывалась реальная дисперсия оценивания для различных соотношений численных значений сопутствующих параметров (разрешающей способности по дальности и скорости), рассчитанных в п. 5 (первый этап);
-
– в соответствии с уравнением (15) рассчитывалась реальная дисперсия оценивания с учётом изменяющегося отношения сигнал/шум для разрешающей способности по дальности 15м и 150 м, рассчитанных в п. 5 (второй этап).
-
9. На основе полученных в п. 6–8 численных значений потенциальных дисперсий оценивания D Д , DV, Dα, элементов матрицы коэффициентов усиления невязки измерений ( K ф 11 – для дальности и K ф 22 – для скорости) и реальных дисперсий оценивания осуществлялось построение графиков.
-
10. Анализировались полученные результаты.
Для реализации п. 7–8 второго этапа исследования в качестве модели, описывающей изменение численного значения текущего отношения сигнал/шум в процессе сближения перехватчика с ВЦ, используемого в (14), на каждом шаге работы алгоритма (3)-(7), принят упрощённый вариант дискретного представления модели, разработанной в [9] вида:
q(k) - q(k - 1Я1 - 4 ^^^^ Л Q(0) - q. (18)
где q 0– начальное значение отношения сигнал/шум.
При получении модели (18), в отличие от модели, представленной в [9], учтено постоянство всех переменных, входящих в состав формулы для вычисления дальности обнаружения РЛС, лежащей в основе разработки данной модели, за исключением оцениваемого расстояния между атакующим перехватчиком и ВЦ Д(k). Значение Д(k) в рамках задачи формирования значений отношения сигнал/шум приравнивается к дальности обнаружения РЛС. То есть выражение (18) является разностным представлением результатов дифференцирования уравнения – 620 – максимальной дальности обнаружения вида Д4(t) = w/q(t), в котором все переменные, кроме Д(t) и q(t), заменены на константу (w).
Особенностью полученной модели (18) является её независимость от направления изменения расстояния между перехватчиком и ВЦ (увеличение или уменьшение). При увеличении расстояния между перехватчиком и ВЦ (наведение «вдогон», когда скорость цели больше ско рости перехватчика) Д(k) > Д(k-1) знак 4 положительный и при выполнении ус-
Ж^-1)
ловия 4(Д(k) – Д(k – 1)) < Д(k – 1), что достигается выбором временного интервала между k и k – 1 шагом, второй множитель (18) принимает значения в диапазоне от 0 до 1, что свидетельствует об уменьшении отношения сигнал/шум на k-м шаге моделирования в сравнении с k – 1. При сокращении расстояния между перехватчиком и ВЦ (наведение на встречно-пересекающихся курсах) Д(k) < Д(k – 1) знак 4 отрицательный. Это приводит к тому, что второй
Ж^-1)
множитель (18) принимает значения большие 1 и, как следствие, увеличивается отношение сигнал/шум на k -м шаге моделирования в сравнении с k – 1.
Упрощённая схема моделирования, используемая для реализации двух этапов исследования, представлена на рис. 1.
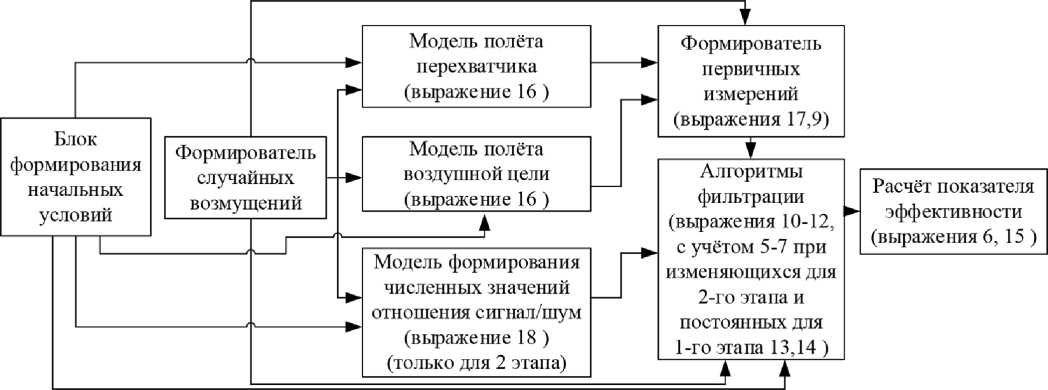
Рис. 1. Структурная схема моделирования
Fig. 1. Structural scheme of modeling
1-й этап исследования
Исходные данные моделирования
Начальные координаты перехватчика и цели соответственно равны xn(0) = 0 м, zn(0) = 0 м и xц(0) = 0 м, zц(0) = 100000 м. Такие координаты обеспечивают начальное расстояние между перехватчиком и ВЦ Д(0) = 100 км. Курсы перехватчика и ВЦ соответственно равны ψn = 0°, ψц = 180°. Моделировался перехват на встречных курсах. Скорости полёта перехватчика и ВЦ на встречных курсах постоянны и равны 170 м/с. Значение отношения сигнал/шум, определя-– 621 – емое в первую очередь энергетическими характеристиками БРЛС (мощность излучения, коэффициент направленного действия) и эффективной поверхностью рассеивания ВЦ, принято постоянным и равным q(k) = const = 10. Шаг работы фильтра (оценивания) Td = 0.1 с.
Результаты моделирования для 1-го этапа исследования представлены на рис. 2–8.
В частности, на рис. 2 представлены полученные при используемых исходных данных в соответствии с (15) траектории полёта перехватчика (кривая 1) и ВЦ (кривая 2). Параметры изменения геометрии взаимного расположения ( Д , V , α ) данной системы подлежат оцениванию.
На рис. 3–5 для всего процесса (времени) наведения для оцениваемых в ситуации, представленной на рис. 2, координат состояния представлены потенциальные дисперсии фильтрации (оценивания) соответственно дальности, скорости и ускорения для различных значений
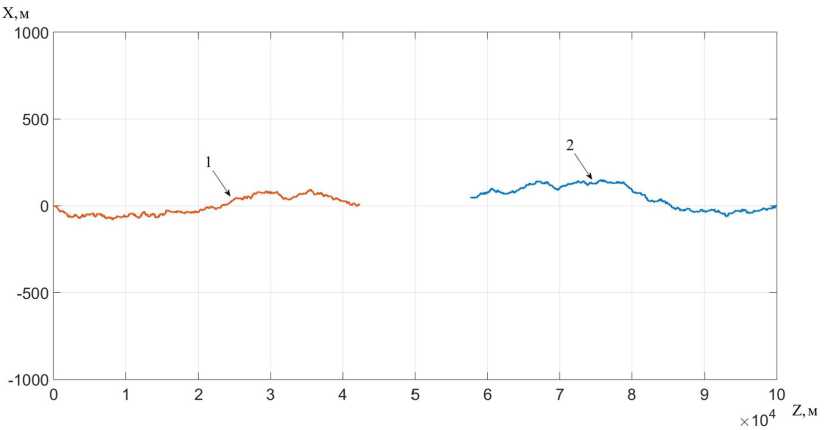
Рис. 2. Траектории полёта перехватчика (кривая 1) и ВЦ (кривая 2)
Fig. 2. Interceptor flight paths (curve 1) and AT (curve 2)
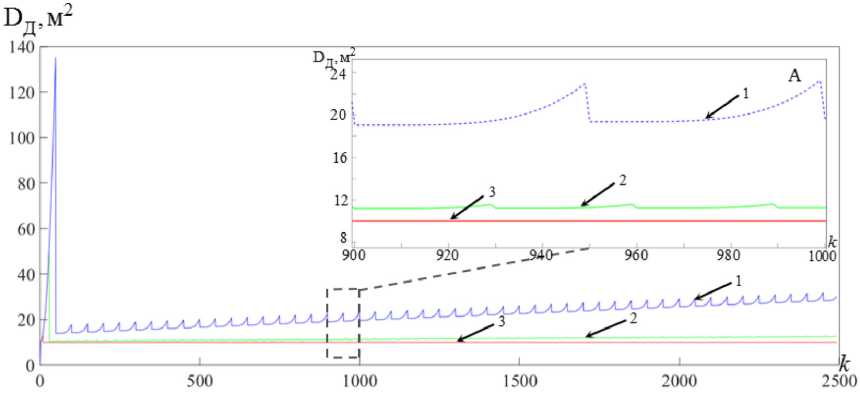
Рис. 3. Потенциальные дисперсии фильтрации (оценивания) дальности при различных интервалах поступления измерений
-
Fig. 3. Potential range filtering (estimation) variances at different measurement receipt intervals
интервалов поступления измерений, в частности Т 1 =5с (кривая 1), Т 2 =3с (кривая 2), Т 3 =1с (кривая 3). Время наведения, исходя из принятых исходных данных, составляет 250 с, или с учётом того, что T d = 0.1 с, k = 2500. Кроме того, для обеспечения возможности детального анализа на каждом рисунке показаны области «А», являющиеся увеличенным представлением зависимостей потенциальных дисперсий для диапазона k = [900–1000].
Анализ результатов, представленных на рис. 3–5, свидетельствует о периодическом характере изменения потенциальных дисперсий оценивания всех координат. Периодичность характера обусловлена нарастанием дисперсии оценок, формируемых в результате их экстраполяции (без учёта измерения), и резким снижением потенциальных дисперсий при поступлении обновляющего точного измерения. Увеличение интервала обращения к ВЦ Т (поступлению
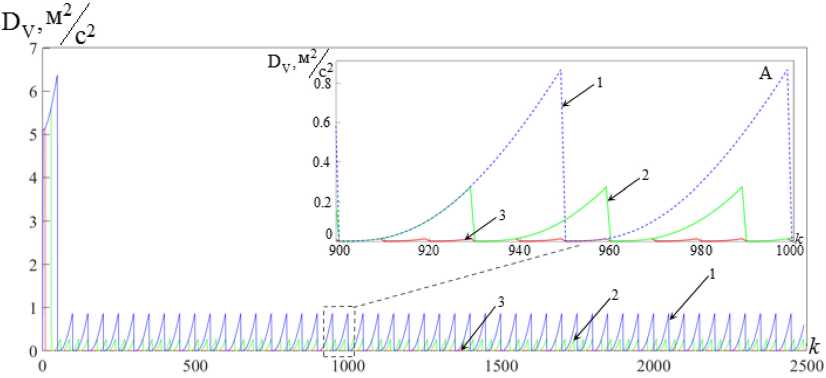
Рис. 4. Потенциальные дисперсии фильтрации (оценивания) скорости при различных интервалах поступления измерений
-
Fig. 4. Potential rate filtering (estimation) variances at different measurement receipt intervals
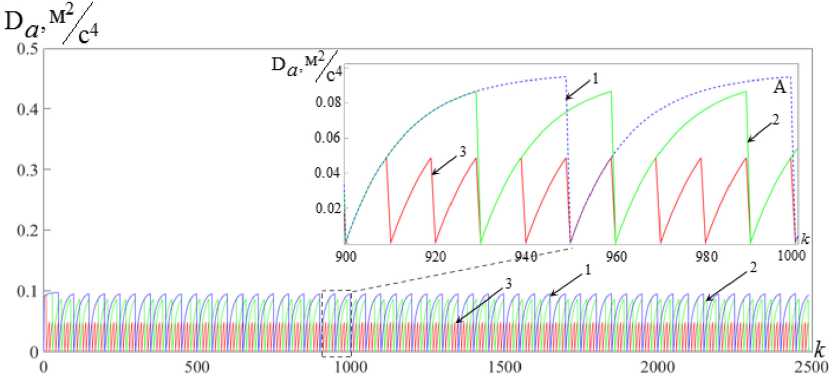
Рис. 5. Потенциальные дисперсии фильтрации (оценивания) ускорения при различных интервалах поступления измерений
-
Fig. 5. Potential variances of acceleration filtering (estimation) at different measurement receipt intervals
измерений) приводит к большим абсолютным значениям накопленных ошибок экстраполяции, что может приводить к расходимости фильтрации ввиду накапливающихся ошибок формируемых оценок, чему свидетельствует возрастающий тренд кривой 1 на рис. 3.
На рис. 6–8 для всего процесса (времени) наведения для ситуации, показанной на рис. 2, представлены нормированные реальные дисперсии фильтрации (оценивания) дальности для различных значений параметров фильтра. В частности:
-
– на рис. 6 представлены три зависимости, полученные при интервалах времени поступления измерений 1 с (кривая 1), 3 с (кривая 2), и 5 с (кривая 3);
-
– на рис. 7 представлены три зависимости, полученные при значениях разрешающей способности по дальности 15 м (кривая 1), 150 м (кривая 2), и 1500 м (кривая 3);
-
– на рис. 8 представлены три зависимости, полученные при значениях разрешающей способности по скорости 0,2 м/с (кривая 1), 2 м/с (кривая 2), и 4 м/с (кривая 3).
-
А нализ рис. 6–8 свидетельствует о следующем:
-
– наблюдается расходимость процесса фильтрации ввиду возрастающих трендов реальной дисперсии фильтрации на трёх рисунках;
-
– наблюдается рост абсолютных значений реальных дисперсий фильтрации дальности при увеличении интервала поступления измерений (на рис. 6 значения кривой 3 превышают значения кривых 2 и 1);
-
– при увеличении разрешающей способности по дальности процесс расходимости становится более ярко выраженным (рис. 7 кривая 3 больший угол наклона по отношению к кривым 2 и 1);
-
– при увеличении разрешающей способности по скорости за интервал времени между поступлениями измерений реальная дисперсия фильтрации изменяется в больших диапазонах в сравнении с малыми значениями разрешающей способности по скорости (рис. 8 область «A» диапазон значений дисперсий кривой 3 больше кривой 2 и больше кривой 1).
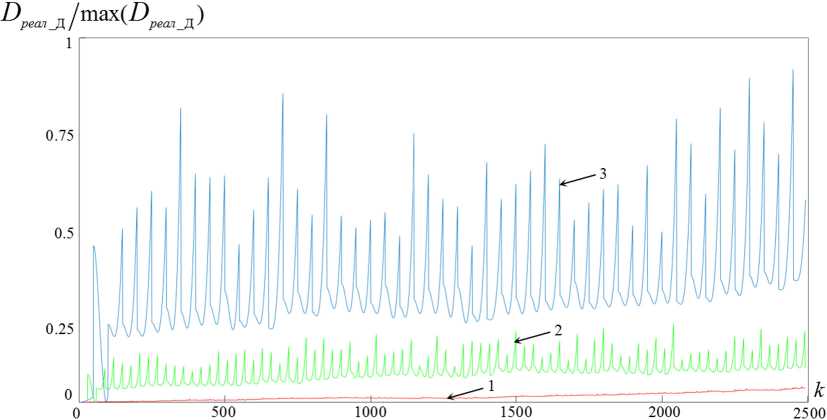
Рис. 6. Реальные дисперсии фильтрации (оценивания) дальности при различных интервалах поступления измерений
Fig. 6. Real range filtering (estimation) variances at different measurement receipt intervals
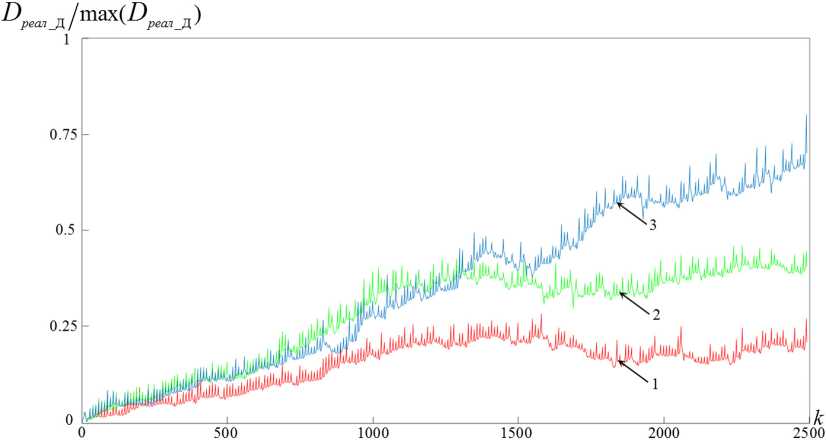
Рис. 7. Реальные дисперсии фильтрации (оценивания) дальности при различных значениях разрешающей способности по дальности
-
Fig. 7. Real range filtering (estimation) variances at different range resolution values
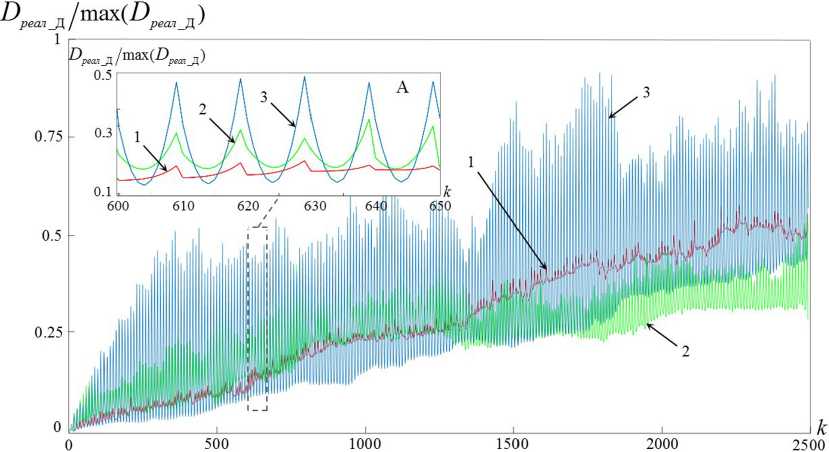
Рис. 8. Реальные дисперсии фильтрации (оценивания) дальности при различных значениях разрешающей способности по скорости
-
Fig. 8. Real range filtering (estimation) variances at different speed resolution values
2-й этап исследования
Отличительной особенностью данного этапа является дополнительное исследование величин потенциальной дисперсии оценивания, коэффициентов невязки измерения и реальной дисперсии оценивания при учёте увеличивающейся в процессе сближения по траекториям, представленным на рис. 2, энергии переотражённого сигнала на входе приёмника БРЛС перехватчика, при интервале поступления измерений Т1=1с. При этом потенциальная дисперсии – 625 – оценивания вычисляется в соответствии с (6), коэффициенты невязки измерения вычисляются в соответствии с (5), с учётом (13) и (14), а реальная дисперсия фильтрации в соответствии с (15). Причём при вычислении реальной дисперсии фильтрации с учётом изменяющейся энергии переотражённого сигнала в (15) при формировании Д^) в соответствии с (10) данная энергия учтена в элементах матрицы коэффициентов невязки измерений (5). В данных элементах энергия учтена в матрице шумов измерений, элементы которой вычисляются в соответствии с (13) с учётом (14) при увеличивающемся q(k).
Характер увеличивающегося в процессе сближения по траекториям, представленным на рис. 2, отношения сигнал/шум q ( k ) (энергии переотражённого сигнала) на входе приёмника БРЛС перехватчика, рассчитанный на основе модели (18), для начального значения отношения сигнал/шум q (0) = 10 и расстояния между перехватчиком и ВЦ Д (0) = 100 имеет вид, изображенный на рис. 9.
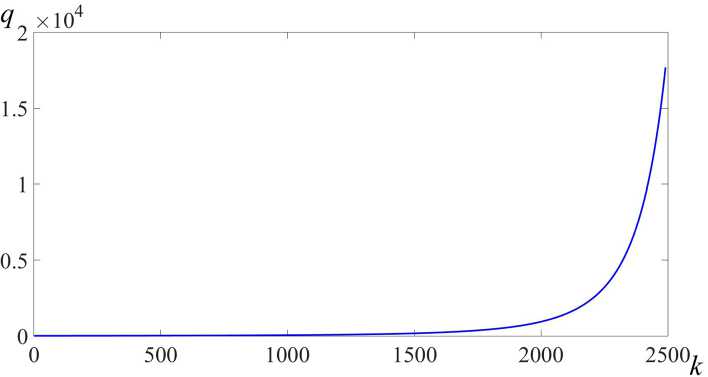
Рис. 9. Отношение сигнал/шум на входе приёмника БРЛС перехватчика
Fig. 9. Signal-to-noise ratio at the input of the interceptor radar receiver
Исходные данные моделирования
Начальные положения перехватчика и ВЦ такие же, как и на первом этапе исследования. Начальное значение отношения сигнал/шум на дальности Д (0) = 100 км принято равным q (0) = 10. Численные значения разрешающих способностей по дальности и скорости, используемые в (14), равны соответственно: δД = 150 м (при длительности импульса 1 мкс), δV = 0,2 м/с (при ширине узкополосного доплеровского фильтра 10 Гц). Шаг работы фильтра (оценивания) T d = 0.1 с.
На рис. 10–12 представлены вычисленные в соответствии с (6) результаты исследования потенциальных дисперсий оценивания координат состояния на всём процессе наведения (время наведения исходя из исходных данных составляет 250 с, или с учётом того, что Td = 0.1 с, k = 2500), представленном на рис. 2 при интервале обращения к цели Т1=1с. Для проведения сравнительного анализа в логарифмическом масштабе даны потенциальные дисперсии фильтрации (оценивания), при формировании которых в (14) учтено увеличение по закону (18) отношения сигнал/шум в матрице шумов измерения (13) (кривая 2 на рис. 10–12), и потенциальные дисперсии фильтрации (оценивания), при формировании которых не учтено увеличение отно-– 626 – шения сигнал/шум, т.е. при вычислении (14) принято q(k) = const = 10 (кривая 1 на рис. 10–12). Кроме того, для обеспечения возможности детального анализа на каждом рисунке показаны области «А», являющиеся увеличенным представлением зависимостей потенциальных дисперсий для диапазона k = [950–1000].
Сравнительный анализ полученных результатов, представленных на рис. 10–12, свидетельствует о следующем. Потенциальная дисперсия фильтрации соответствующих координат состояния (дальности, скорости и ускорения) без учёта изменяющегося отношения сигнал/шум (кривая 1 на рис. 10–12) на протяжении всего процесса наведения имеет периодический характер (зона «А» на рис. 10–12). При этом ввиду неучёта в процессе сближения увеличивающегося отношения сигнал/шум минимальные значения потенциальной дисперсии «Δ» (рис. 10–12) в моменты прихода измерений (т.е. для принятых исходных данных Т1=1с, Td = 0.1 каждые десять отсчётов k, что детально представлено в зоне «А» на рис. 10–12) имеют фиксированные значения. Наряду с этим анализ зависимости 2, характеризующей на рис. 10–12 потенциальные дисперсии оценок соответствующих координат состояния, при формировании которых
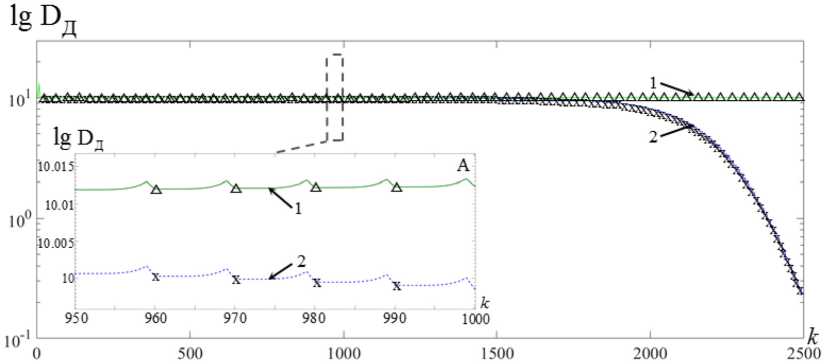
Рис. 10. Потенциальные дисперсии фильтрации (оценивания) дальности
Fig. 10. Potential range filtering (estimation) variances
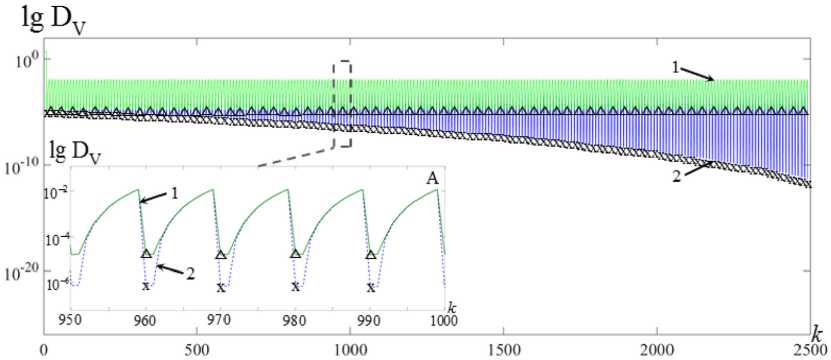
Рис. 11. Потенциальные дисперсии фильтрации (оценивания) скорости
Fig. 11. Potential rate filtering (estimation) variances
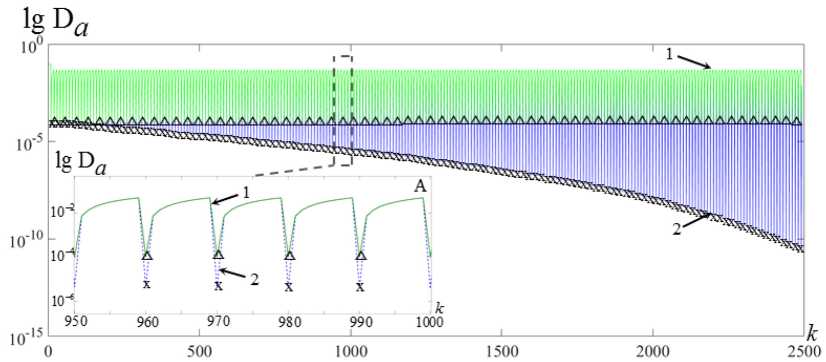
Рис. 12. Потенциальные дисперсии фильтрации (оценивания) ускорения
Fig. 12. Potential variances of acceleration filtering (estimation)
учтено увеличивающееся отношение сигнал/шум на входе приёмника БРЛС, свидетельствует об уменьшении в процессе наведения минимальных значений потенциальной дисперсии фильтрации «x» (кривая 2 на рис. 10–12) в моменты прихода измерений.
На рис. 13 и 14 для тех же условий представлены вычисленные на основе (5) элементы матрицы коэффициентов усиления невязки измерений ( K ф 11 – для дальности и K ф 22 – для скорости). Данные расчёты выполнены с учётом результатов вычислений в соответствии с (6) элементов матрицы потенциальных дисперсий фильтрации D ( k ) дальности и скорости (результаты представлены на рис. 10–12) и результатов вычислений на основе (13) с учётом (14) обратных элементов матрицы шумов измерений D/1^. Для проведения сравнительного анализа на данных рисунках приведены элементы матрицы коэффициентов усиления невязки измерений K ф 11 и K ф 22, при формировании которых не учтено увеличение отношения сигнал/шум, т.е. при вычислении (14) принято q ( k ) = const = 10 (кривая 2 на рис. 13 и 14) и K ф 11, K ф 22 при формировании которых в (14) учтено увеличение по закону (18) отношение сигнал/шум (кривая 1 на рис. 13 и 14). Для возможности детального анализа представлены область «А» (рис. 13 и 14) и область «В» (рис. 14).
Анализ результатов моделирования, представленных на рис. 13 и 14, позволяет заключить следующее. Коэффициент усиления невязки измерений дальности K ф 11 (кривая 1 в зоне «А» на рис. 13), полученный в результате вычислений с учётом увеличивающегося отношения сиг-нал/шум, уже на начальном этапе сопровождения имеет большие абсолютные значения по отношению к K ф 11, полученному без учёта увеличивающегося отношения сигнал/шум (кривая 2 в зоне «А» на рис. 13), а на конечном участке сопровождения превосходство значений, отображаемых кривой 1 над кривой 2, значительно увеличивается (рис. 13). Наряду с этим коэффициент усиления невязки измерений скорости K ф 22, вычисленный с учётом изменяющегося отношения сигнал/шум, уже на начальном этапе сопровождения быстро достигает максимальных значений (кривая 1 в зоне «А» на рис. 14) и далее в процессе всего сопровождения существенно не изменяется. Зона «В» рис. 14, являющаяся увеличенным представлением участка диапазона k = [400–500] области «А», позволяет детально изучить характер зависимости. Зависимость – 628 –
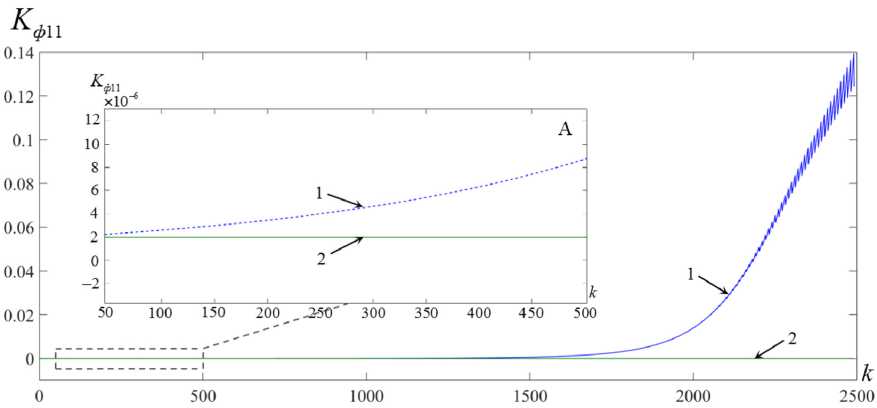
Рис. 13. Коэффициент усиления невязки измерений дальности
Fig. 13. Range measurement discrepancy gain factor
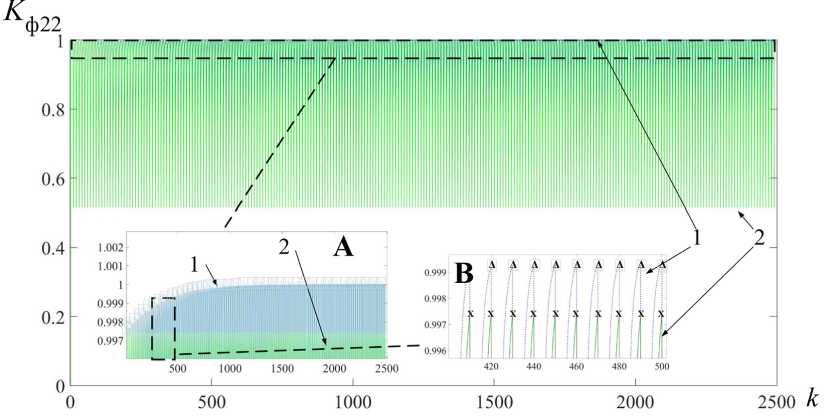
Рис. 14. Коэффициент усиления невязки измерений скорости
Fig. 14. The coefficient of gain of the velocity measurement discrepancy имеет периодический характер, численные значения коэффициентов усиления невязки скорости, полученные с учётом увеличивающегося отношения сигнал/шум, достигают больших значений «Δ» (кривая 1, зона «В» на рис. 14) по сравнению с коэффициентами, рассчитанными без учёта изменяющегося отношения сигнал/шум «х» (кривая 2, зона «В» на рис. 14). Обобщая вышеизложенный анализ результатов, представленных на рис. 13 и 14, следует заключить, что зависимости, отражающие Kф11 и Kф22, построенные с учётом изменяющегося отношения сигнал/шум (кривая 1 на рис. 13 и 14), имеют восходящий тренд и превосходят аналогичные зависимости, построенные без учёта отношения сигнал/шум. Этот факт приводит к большему влиянию невязки измерений [z(k) – Qz(k)H(k)xЭ(k)] в выражении (3), что свидетельствует о сильной значимости результатов измерений при формировании оценок соответствующих коорди-– 629 –
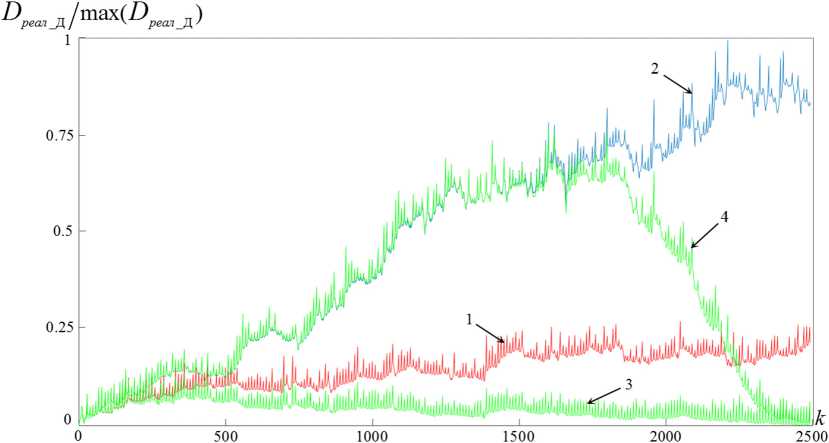
Рис. 15. Реальная дисперсия фильтрации с учётом и без учёта увеличивающейся энергии
Fig. 15. Real filtration dispersion with and without increasing energy нат состояния, что, как следствие, препятствует расходимости фильтрации при реализации в БРЛС режима сопровождения на проходе.
Более наглядно предотвращение расходимости фильтрации за счёт учёта увеличивающейся энергии переотражённого сигнала видно при анализе результатов вычислений, в соответствии с (15), реальной дисперсии оценивания дальности, представленной на рис. 15, на котором принято: зависимости 1,2 – реальная дисперсия фильтрации дальности без учёта увеличивающейся энергии сигнала, полученная для значений разрешающей способности по дальности соответственно 15 м и 150 м, при интервале поступления измерений 1 сек; зависимости 3,4 – реальная дисперсия фильтрации при учёте увеличивающейся энергии переотражённого сигнала, полученная для значений разрешающей способности по дальности соответственно 15 м и 150 м, при интервале поступления измерений 1 сек.
Анализ результатов, представленных на рис. 15, свидетельствует о следующем:
– учёт увеличивающейся энергии переотражённого сигнала предотвращает расходимость фильтрации, чему свидетельствует спадающий характер зависимостей 3, 4 в сравнении с зависимостями 1, 2;
– учёт увеличивающейся энергии отражённого сигнала может скомпенсировать низкое качество измерителя. В частности, обеспечить лучшие показатели точности формируемых оценок на основе данных измерителя с большой разрешающей способностью (зависимость 4 на рис. 15), чем данные показатели у формирователя оценок дальности на основе данных с выхода измерителя с малой разрешающей способностью по дальности (зависимость 1 на рис. 15). Очевидным этот факт становится на конечном участке полёта, при совместном анализе зависимостей 4 и 1 на рис. 15, когда значения зависимости 4 становятся меньше зависимости 1.
Совместный анализ рис. 10–15 позволяет заключить о целесообразности учёта изменяющегося отношения сигнал/шум при фильтрации координат состояния на крайнем этапе – 630 – наведения в диапазоне k ~ [1500–2500], что при принятых исходных данных относительно Д(0) = 100 км и скорости взаимного сближения перехватчика и ВЦ порядка 340 м/с составляет удаление до ВЦ порядка 50 км. В диапазоне k ~ [2000–2500], что соответствует удалению цели порядка 30 км, учёт изменяющегося отношения сигнал/шум даёт значительный выигрыш, особенно в точностных характеристиках дальности, чему свидетельствует анализ рис. 10 и 15. Это обусловлено тенденцией резкого роста в данном диапазоне отношения сигнал/шум (рис. 9), что определяется относительно малым значением величины Д(k – 1) в знаменателе (18).
Очевидно, что данные результаты могут быть использованы и для других режимов работы БРЛС, например, при непрерывной пеленгации цели и формировании оценок на основе классических уравнений дискретной калмановской фильтрации.
Заключение
Проведённое на примере фильтра дальномерного канала исследование влияния изменяющегося отношения сигнал/шум на входе приёмника БРЛС в процессе сближения перехватчика с ВЦ, а также сопутствующих параметров на потенциальную и реальную точность алгоритма фильтрации параметров ВЦ позволило установить:
-
– использование аппарата аналогово-дискретной фильтрации в интересах непрерывного формирования оценок требуемых координат состояния при сопровождении ВЦ на проходе обуславливает периодический характер потенциальной дисперсии фильтрации с нарастающими её значениями между измерениями;
-
– увеличение интервала обращения к ВЦ (поступлению измерений) приводит к большим абсолютным значениям накопленных ошибок экстраполяции и росту абсолютных значений реальных дисперсий фильтрации дальности;
-
– длительное сопровождение (порядка 250 сек) ВЦ без учёта увеличивающейся энергии переотражённого сигнала обуславливает расходимость процесса фильтрации;
-
– при увеличении разрешающей способности по дальности процесс расходимости становится более ярко выраженным;
-
– при увеличении разрешающей способности по скорости за интервал времени между поступлениями измерений реальная дисперсия фильтрации изменяется в больших диапазонах в сравнении с малыми значениями разрешающей способности по скорости;
-
– учтёт увеличивающегося отношения сигнал/шум на входе приёмника БРЛС приводит к уменьшению потенциальных дисперсий оценивания соответствующих координат состояния;
-
– учёт увеличивающейся энергии переотражённого сигнала предотвращает расходимость фильтрации;
-
– учёт увеличивающейся энергии отражённого сигнала может скомпенсировать низкое качество измерителя.
-
– предпочтительный диапазон расстояний между перехватчиком и ВЦ для рассматриваемой тактической ситуации, с которых требуется учёт изменяющегося отношения сигнал/ шум в алгоритмах фильтрации, составляет порядка 30 км. С учётом этого предпочтительным является учёт увеличивающейся энергии переотражённого сигнала при формировании оценок координат состояния в активных радиолокационных головках самонаведения ракет в сравнении с БРЛС.
В качестве недостатка предложенного подхода следует отметить некоторое усложнение алгоритмов фильтрации.
