Исследование эффективности активно-импульсного метода обнаружения световозвращающих объектов

Автор: Алантьев Д.В., Борзов С.М. , Потатуркин О.И., Узилов С.Б.
Журнал: Компьютерная оптика @computer-optics
Рубрика: Обработка изображений, распознавание образов
Статья в выпуске: 4 т.49, 2025 года.
Бесплатный доступ
Данная статья посвящена экспериментальному исследованию эффективности аппаратно-программных средств лазерной импульсной локации без применения электрооптического преобразователя в качестве внешнего затвора. Система предназначена для обнаружения световозвращающих объектов, в т.ч. оптических и оптико-электронных приборов наблюдения. Приведены результаты измерений на многоплановой сцене в зависимости от положения активной зоны видимости лазерной импульсной локации. Показана возможность определения расстояний до объектов за счет обработки последовательностей изображений, полученных при сканировании сцены по дальности и квадратичной аппроксимации полученных значений сигналов с расчетом координат их максимумов. Предложены и продемонстрированы алгоритмы обработки регистрируемых изображений с целью обнаружения слабоконтрастных объектов (с низким показателем световозвращения) на сложном фоне.
Обнаружение световозвращающих объектов, лазерная импульсная локация, показатель световозвращения, обработка изображений
Короткий адрес: https://sciup.org/140310509
IDR: 140310509 | DOI: 10.18287/2412-6179-CO-1582
Investigation of the effectiveness of the active pulse method for detecting retroreflective objects
This work describes an experimental study of the effectiveness of hardware-software means for laser pulse location without using an electron-image tube as an external shutter. The system is designed to detect retroreflective objects, including optical and optoelectronic surveillance devices. Results of measurements on a multidimensional scene are presented depending on the position of the active visibility zone of the laser pulse location. It is shown that distances to objects can be determined by processing image sequences obtained using range scanning of a scene and a quadratic approximation of the obtained signal values with the calculation of coordinates of their maxima. A technique for processing the recorded images in order to detect low-contrast objects (with a low retroreflection index) on a complex background is proposed and demonstrated.
Текст научной статьи Исследование эффективности активно-импульсного метода обнаружения световозвращающих объектов
Задача обнаружения световозвращающих объектов, таких как оптические и оптико-электронные приборы наблюдения (видеокамеры, приборы ночного видения, бинокли, прицельные устройства), уголковые отражатели, катафоты, плёночные покрытия на основе микростеклосфер и т.п., является актуальной и решается на протяжении многих лет, в т.ч. с применением метода лазерной импульсной локации (ЛИЛ) [1 –4]. При этом одной из важных с практической точки зрения функций, отсутствующих у других типов систем видения, является возможность определения дальности до обнаруживаемых объектов [5–7].
Функционирование подобных систем основано на использовании эффекта световозвращения, возникающего при подсветке объектов указанных типов лазерным импульсным излучением, в результате чего в поле зрения в координатах соответствующих световозвращающих объектов формируются светящиеся точки на фоне подстилающей поверхности. Они наблюдаются только из позиции, близкой к позиции излучателя, и их яркость зависит от показателя свето-возвращения (ПСВ) объектов. Для повышения эффективности обнаружения световозвращающих объектов на больших дистанциях осуществляется организация синхронной работы лазерного излучателя, используемого для подсветки сцены, и фотоприемно-го устройства (ФПУ) с быстродействующим затвором. Причем подсветка осуществляется короткими импульсами, а затвор ФПУ открывается на время, близкое к их длительности, с задержкой (относительно срабатывания излучателя), равной времени распространения света до наблюдаемых объектов и обратно. За счет этого ФПУ воспринимает излучение, отраженное от объектов интереса, находящихся только на некотором интервале дальностей (далее АЗВ – активная зона видимости). Ближнюю к источнику излучения дальность называют дальностью АЗВ, разность между границами интервала – глубиной АЗВ.
В качестве затвора в устройствах, функционирующих на основе изложенного метода, как правило, применяется быстродействующий электрооптический преобразователь (ЭОП) [8, 9]. Однако использование ЭОП приводит к усложнению конструкции систем ЛИЛ и снижению пространственного разрешения формируемых изображений наблюдаемой сцены. Альтернативным решением является реализация функции затвора с помощью специального алгоритма управления двухсекционным ПЗС-приёмником со строчным переносом [10]. Указанный подход позволяет создавать малогабаритные и энергоэффективные активно-импульсные устройства обнаружения световозвращающих объектов без использования в их кон- струкции ЭОП или иного внешнего быстродействующего затвора [11, 12]. Определенные особенности данного способа связаны с ограниченным быстродействием таких устройств (интервал накопления сигнала не может быть менее 1,4 мкс), что определяет минимальный размер глубины АЗВ (210 м) и затрудняет их функционирование в условиях интенсивного фонового освещения.
Целью данной работы является экспериментальное исследование эффективности разработанных аппаратно-программных средств обнаружения светоотражающих объектов на основе зондирования импульсным лазерным излучением (без применения ЭОП в качестве внешнего затвора) и предложенных алгоритмов обработки данных в режиме обнаружения слабоконтрастных объектов и определения их дальности.
Алгоритмы обработки данных
Исследование метода лазерной импульсной локации выполнено с применением прототипа оптикоэлектронной системы ЛИЛ [12]. Его аппаратная часть состоит из оптико-электронного модуля, опорноповоротного устройства, обеспечивающего наведение по азимуту и углу места, и управляющего компьютера.
Обнаружение объектов в поле зрения осуществляется путём обработки серии из n кадров последовательности, зарегистрированной при периодической импульсной лазерной подсветке. Отметим, что n = n 1 +n 0 , где n 1 – количество кадров с подсветкой лазерным излучением, n 0 – количество кадров без подсветки.
Алгоритм обработки данных включает:
-
1. Формирование разностного изображения
I ( x , y ) =
-
2. Определение пространственного распределения информативных сигналов
1 n 1 1 n 0
— У 1 1 ( x , y ; i )-- У 1 0 ( x , y ; i )
n i “1 n о “Г
где I 1 ( x , y , i ) – i- кадр с подсветкой, и I 0 ( x , y , i ) – i -кадр без подсветки [10], х , у – пространственные координаты пикселей изображения.
F (x, У ) = УI (x + xi, У + У1)_ в
-
- NT У I ( x + x i ’ У + У 1 ) )’
N я я
где ю и Q - центральная и периферийная зоны фрагмента, N в и N - количество пикселей в них, соответственно, x i , y 1 € ю , Я . Таким образом вычисляется интегральный сигнал от объекта (без фона), находящегося в пределах центральной зоны, а вычитаемый фоновый сигнал учитывает соотношение между количеством пикселей центральной и периферийной зон.
Информативный сигнал каждого находящегося в поле зрения объекта Fоибзм определяется как макси- мальное значение по некоторой окрестности ю в полученном распределении F(x, y) с пространственными координатами, соответствующими положению данного объекта (x0, y0):
F F ( x 0 , y 0 ) = max ( x о , y о ) F ( x , y ) = F T ■ (3)
Размер окрестности, по которой определяется максимум, в общем случае может отличаться от размеров центральной окрестности. Он определяется необходимой точностью определения координат обнаруживаемого объекта на изображении. В представленных экспериментах указанные размеры соответствовали друг другу.
Обнаружение световозвращающих объектов в поле зрения осуществляется путём поиска в сформированном распределении F ( x , y ) локальных максимумов F о и б зм и определения среди них отсчётов с аномальными значениями (отличающихся от среднего значения более чем на 3 СКО) [13].
Оценка дальности до конкретного объекта осуществляется путем определения момента прихода отраженного от него излучения. В общем случае для этого после обнаружения объекта необходимо изменять задержку стробирования до тех пор, пока яркость наблюдаемого объекта не станет максимальной, т.е. совместить середину АЗВ с положением данного объекта по дальности [14]. Найденная таким образом задержка стробирования наиболее точно укажет на дальность до объекта. Однако данный способ весьма затратен по времени измерения, особенно при малом шаге изменения задержки стробирования.
В качестве альтернативного предложен метод расчета дальности путем интерполяции значений сигналов при нескольких дальностях АЗВ [15]. В частности, в [16] расчет осуществляется с учетом формы импульсов подсвета пространства. Этот метод позволяет повысить точность измерений, однако, как и предыдущий, не обеспечивает определения дальностей до наблюдаемых объектов в реальном времени. По этой причине в разработанной системе определение момента прихода отраженного от объекта излучения осуществляется путем полиномиальной интерполяции соответствующих информативных сигналов при различной дальности АЗВ и расчета положения максимума.
Отраженный сигнал от каждого знака регистрируется только при его нахождении в пределах активной зоны видимости. При этом сигнал от объекта определяется сверткой двух прямоугольных импульсов различной длительности (импульсов лазерной подсветки и срабатывания затвора ПЗС-приемника), а зависимость сигнала от дальности зоны видимости будет представлять собой трапецию, длина верхней стороны которой определяется длительностью открытия затвора. Горизонтальный размер боковых сторон определяется длительностью зондирующих импульсов. Это позволяет с высокой точностью определить дистанцию до каждого из объектов, измеряя относительный уровень их сигналов в нескольких изображениях, полученных на различных шагах сканирования дальности зоны видимости, и осуществляя полиномиальную интерполяцию соответствующих сигналов.
Определение дальности до объекта осуществляется путем уточнения положения максимума с помощью интерполяции данных измерений полиномом второй степени. Пусть имеются три последовательных отсчета сигнала FofM (/1), FT (12), FT (13) при различной дальности АЗВ l1, l2, l3. Тогда параболическая зависимость в общем случае выглядит
F 3M = a/ 2 + bl + c , (4)
где
b =
( F T ( 1 3 ) - FT ( / 1 ) ) ( 1 2 - 1 ,2 ) - ( F T ( 1 2 ) - F T ( / 1 ) ) ( 1 3 - F )
( 1 3 - 1 1 )( 1 2 - 1 3 )( 1 2 - / 1 )
,
a = FT ( / 2 2 ) - FT ( / 1 ) - ( / 2 - / 1 ) b
/ 22 - / 12
.
Учитывая, что дальность АЗВ меняется с фиксированным шагом, максимум параболической функции, проходящей через эти точки, будет при следующем значении дальности:
I = b + max 2
+ S X (FT (/1)- FT (/3)) (7) 2(FT (/1) + FT (/3) - 2 X FT (/2) ’ где S – шаг сканирования дальности АЗВ, а собственно дальность до объекта будет превосходить указанное значение на половину глубины АЗВ.
Экспериментальные исследования
С целью проверки работоспособности и эффективности разработанных алгоритмов и аппаратнопрограммных средств обнаружения световозвращающих объектов в условиях интенсивного солнечного освещения, а также определения с их помощью дальности до объектов за счет регистрации их сигналов при различном положении активной зоны видимости системы ЛИЛ проведены измерения на тестовой сцене. Ее вид приведен на рис. 1. Данное изображение зарегистрировано с применением обычной телевизионной камеры. Схема наблюдаемого участка местности представлена на рис. 2. Наблюдение осуществлялось в направлении вдоль проспекта Академика Лаврентьева из высотного здания, находящегося на значительном расстоянии за пределами схемы (с левого верхнего угла). Объектами наблюдения в данном эксперименте являлись знаки пешеходных переходов, расположенные в пределах сцены.
Поле зрения системы наблюдения (участок сцены, наблюдаемый системой одномоментно без изменения направления визирования) ограничено и имеет форму прямоугольника. По этой причине следует различать вертикальный и горизонтальный размеры поля зрения и, соответственно, вертикальный и горизонтальный углы обзора.
Угол обзора рассматриваемой системы наблюдения по вертикали составляет ~1 градус, что не позволяло наблюдать всю сцену одновременно, поэтому она была условно разбита на дальний и ближний участки, наведение на которые осуществлялось изменением направления визирования с применением опорно-поворотного устройства. В совокупности на этих двух участках сцены находились 15 знаков пешеходных переходов . Выполнялась регистрация изображений данной сцены в активном режиме при постоянной глубине АЗВ 210 м и различных ее дальностях (от 2400 м до 1000 м) с шагом по дальности 100 м. При уменьшении дальности АЗВ постепенно «проявлялись» все более близкие к системе наблюдения объекты. Каждый знак хорошо виден при трех дальностях зоны видимости. Уровень сигнала, регистрируемого при других шагах сканирования в зонах, соответствующих этим знакам, обусловлен фоновым излучением сцены.

Рис. 1. Изображение сцены
На рис. 3 приведены несколько таких изображений, содержащих в совокупности все наблюдаемые знаки пешеходных переходов. Помимо знаков пешеходных переходов, на изображениях также можно наблюдать отдельные интенсивные сигналы, вызван- ные солнечным отражением от зеркальных поверхностей и собственным свечением автомобилей на проезжей части. Эти сигналы не связаны с импульсами подсветки и в контексте данной работы также являются фоновыми.
Пронумеруем объекты начиная с дальних. На дальнем участке:
-
- две пары знаков (1 –4) пешеходных переходов над проезжей частью на небольшом удалении друг от друга в районе перекрестка с проспектом Академика Коптюга (видны на изображениях с дальностью АЗВ 2100–2200 м);
-
- два знака (5, 6) справа от проезжей части в районе этого же перекрестка (видны при этой же дальности АЗВ 2100–2200);
-
- далее один знак (7) слева от проезжей части (виден при дальности АЗВ 1800–2000 м), аналогичный знак справа закрыт растительностью;
-
- две пары перекрывающих друг друга знаков (8 – 11) пешеходных переходов над проезжей частью в районе ближнего перехода (хорошо видны при дальности АЗВ 1700 м, на изображении 1800 м только слегка проявляются), правая из них частично закрыта растительностью.
На ближнем участке:
-
- знак (12) пешеходного перехода слева от проезжей части в районе перекрестка с улицей Николаева (виден при дальности АЗВ 1300 м);
-
- два знака (13, 14) в районе автобусной остановки Институт теплофизики, один (13) слева от проезжей части, один (14) над ней (видны при дальности АЗВ 1000 (на пределе) и уверенно при 1100, 1200 м);
-
- один знак (15) в районе перекрестка с улицей Пирогова над проезжей частью (хорошо виден при дальности АЗВ 900, 1000, 1100 м).
г)
а)
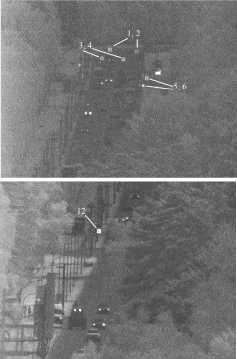

Рис. 2. Схема местности
б)
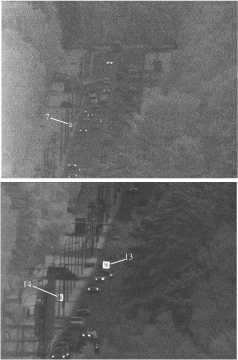
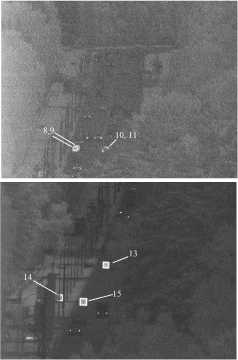
Рис. 3. Изображения, зарегистрированные системой ЛИЛ в активном режиме при различной дальности АЗВ: а) 2200 м, б) 1900 м, в) 1700 м, г) 1300 м, д) 1200 м, е) 1100 м
-
Положение соответствующих пешеходных переходов на схеме показано красными линиями, пересекающими проспект Академика Лаврентьева.
Отметим, что обнаруживаемые знаки установлены на различных высотах от поверхности земли. Так, объекты 13 и 14 – это дорожные знаки, относящиеся к одному и тому же переходу и расположенные на равном удалении от точки наблюдения. Знак 13 расположен на кронштейне над центром проезжей части на уровне 5,5 метров от поверхности земли (как и знаки 1 –4, 8– 11, 15). Знак 14 расположен сбоку от проезжей части на уровне 2 метра (как и знаки 5–7). Поскольку наблюдение ведется под небольшим углом к горизонту визуально возникает ощущение, что объекты 14 и 15 находятся на одной дальности, а объект 13 – существенно дальше. Это ошибочное впечатле- ние, что и продемонстрировали результаты определения дальности методом ЛИЛ.
На рис. 4 в графическом виде представлены значения сигналов 11 объектов дальнего участка сцены от дальности АЗВ, полученные при фиксированном поле зрения.
Определение дальности до каждого из объектов осуществлялось путем вычисления положения максимума параболической функции, проходящей через три точки, соответствующие максимальным значениям сигналов, а собственно дальности до объектов превосходили указанные значения на половину глубины АЗВ, т.е. в данном случае на 105 м.
Так, дальности для дальнего участка сцены составили: до объектов 1 и 2 – 2356 и 2355 м, до объектов 3–6 – 2305, 2290, 2337 и 2274 м, до объекта 7–
1975 м, до объектов 8–11 – 1764, 1774, 1773 и 1764 м. Для ближнего участка сцены дальность до объекта 12 – более 1400 м, до объектов 13, 14 – 1160 м, до объекта 15 – 1040 м. Измерения, выполненные по схеме местности, подтвердили полученные значения дальностей до указанных объектов (отклонение составило не более 20 метров).
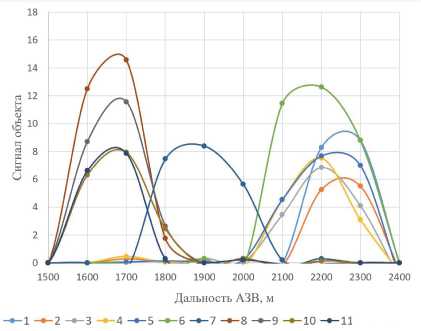
Рис.4. Зависимости сигналов объектов от дальности АЗВ
Разработанные аппаратно-программные средства позволяют с высокой достоверностью обнаруживать световозвращающие объекты с малой световой апертурой на значительной дальности. В качестве примера на рис. 5 приведены изображения сцены, содержащей группу людей с полевым биноклем на дальности 2000 м (поблизости с объектом 7).

Рис. 5. Полевой бинокль на дальности 2000 м
Видно, что обнаружение данного объекта в активно-импульсном режиме может быть выполнено безошибочно даже без применения дополнительной обработки изображений. Однако для эффективного обнаружения объектов низким ПСВ требуется применение специальных методов обработки.
Эффективность обнаружения слабоконтрастных объектов с применением разработанных средств проверена на примере обнаружения миниатюрной видеокамеры на той же дальности. Фрагмент изображения, зарегистрированного в активном режиме, и увеличенный его участок с объектом интереса приведены на рис . 6.
а)

б)
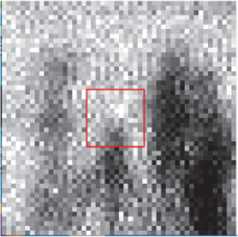
Рис. 6. Видеокамера на дальности 2000 м: а) фрагмент изображения сцены, б) увеличенный его участок
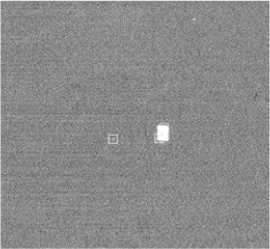
Рис. 7. Разностный кадр с результатами обнаружения при пороге 5 СКО
На рис. 7 приведена разность между изображениями в активном и пассивном режиме и результат обнаружения объектов в поле наблюдения (видеокамеры и знака пешеходного перехода). На разностном кадре сигнал от видеокамеры вполне различим, несмотря на его очень низкий уровень. В данном случае информативный сигнал от объекта
F о и б зм составляет 4,4 условных единиц при среднем значении локальных максимумов фона 1,51 и их СКО 0,42. Это обеспечивает его обнаружение разработанными программными средствами при пороге вплоть до 5 СКО.
Заключение
Экспериментально исследована эффективность аппаратно-программных средств обнаружения светоотражающих объектов на основе зондирования импульсным лазерным излучением без применения ЭОП в качестве внешнего затвора.
Показана возможность определения дальности до обнаруживаемых объектов за счет измерения их сигнала при различном положении активной зоны видимости системы ЛИЛ. При этом использование сканирования сцены по дальности с шагом несколько меньшим половины глубины АЗВ позволяет осуществить определение дальности до обнару- женных объектов путем измерения и квадратичной аппроксимации полученных значений сигналов при трех различных положениях АЗВ и расчета координаты максимума. Это позволяет выполнить определение дальности до объектов с точностью более половины шага сканирования. Дальнейшее повышение точности измерения дальности возможно за счет определения и более точного учета формы АЗВ, однако такая цель в данной работе не ставилась.
Экспериментально продемонстрирована эффективность предложенных алгоритмов обработки данных и разработанных аппаратно-программных средств для обнаружения малоконтрастных световозвращающих объектов в условиях интенсивного солнечного освещения, в том числе при наличии в поле зрения зеркальных и диффузных отражающих поверхностей.
Работа выполнена при поддержке Министерства науки и высшего образования в рамках Государственного задания № 124041700103-1 в ИАиЭ СО РАН.
