Исследование кинематических характеристик цилиндрических прямозубых передач, формообразуемых накатыванием средствами САПР

Автор: Вавилов Денис Владимирович, Колегова Мариямихайловна, Иптышев Андрей Анатольевич, Елисеев Дмитрий Борисович
Журнал: Сибирский аэрокосмический журнал @vestnik-sibsau
Рубрика: Математика, механика, информатика
Статья в выпуске: 1 (34), 2011 года.
Бесплатный доступ
Рассмотрена методика анализа кинематики и управления качественными характеристиками накатной зубчатой передачи при помощи современных средств имитационного моделирования.
Кинематика зубчатой пары, имитационное моделирование, эвольвентные зубчатые передачи
Короткий адрес: https://sciup.org/148176524
IDR: 148176524 | УДК: 62-233.3/.9
Research of rolled spur gears kinematic characteristics by using computer-aided software
In article is presented an analysis method of rolled spur gear kinematics and quality characteristic manage by using modern computer aided software.
Текст научной статьи Исследование кинематических характеристик цилиндрических прямозубых передач, формообразуемых накатыванием средствами САПР
Широкий спектр применения передаточных механизмов на основе зубчатых колес порождает разнообразие требований к их свойствам, что влечет за собой разнообразие применяемого инструментально-технологического обеспечения их качества, выбор которого должен в максимальной степени удовлетворять конкретному набору требований к передаче. Можно отметить, что общим требованием для всех типов передач является обеспечение работоспособности с заданной вероятностью безотказной работы. Однако и здесь различия в реальных условиях работы и расчетный ресурс, от единиц минут до десятков лет, требуют выбора конкретной совокупности средств реализации, начиная с определения адекватных техническому заданию на проектирование геомет-рически-кинематических параметров передачи. Этот подход обусловлен тем, что геометрия профилей контактирующих пар определяетхарактер взаимодействия зубьев при передаче нагрузки и, следовательно, интенсивность их изнашивания, а в конечном счете и ресурс работы.
В многоступенчатых приводах космических аппаратов, в частности механизмах поворота антенн, наиболее важную роль играетпервая ступень привода. Так, например, анализ статистики отказов привода в работе [1], показывает, что наибольшему износу подвержены первая и третья ступень. Установлено [1; 2], что кинематическая неточность первой ступени вызывает динамическую нагрузку на вторую и дальнейшие ступени. На третьей ступени крутящий момент достигает достаточной величины и колебания окружной скорости ведущего колеса, в частности в момент пуска, приводят к возникновению ударной нагрузки. Одним из способов решения данной проблемы является минимизация колебаний угловых скоростей в зубчатых парах привода. Этого можно достигнуть путем оптимизации параметров зубчатой пары и высокой точности изготовления.
В механизмах поворота антенны наиболее критичным параметром являются колебания шага зубьев, которые в первую очередь приводятк возникновению колебаний в угловых скоростях ступеней привода. Второй момент – обеспечение плавного входа в зацепление путем выбора таких параметров пары, при которых угол между касательными к профилям сопряженных зубьев, проходящими через точку контакта в момент входа зубьев в зацепление, будет близким к нулю (либо минимально возможным). Одним из эффективных способов решения данной проблемы является использование накатных зубчатых колес [2].
Существующие технологии изготовления накатных зубчатых колес позволяют получить передачи, обладающие рядом преимуществ по сравнению с полученными резанием, но имеющие более низкую кинематическую точность. Современные средства компьютерного моделирования позволяют на этапе проектирования с достаточной степенью достоверности оценить качество синтезируемой передачи и обеспечить необходимый и достаточный уровень качественных показателей.
В работе [3] разработана методика имитационного моделирования процесса формообразования мелкомодульных зубчатых колес в пакете MSC.Marc 2007. В результате моделирования была получена геометрия накатного колеса. В данной работе представлено сравнительное исследование кинематических характеристик «накатанных» и «нарезных» передач. Исследование кинематических характеристик зубчатой пары проводилось в САЕ-пакете MSC.visualNastran Desktop 2005. Данный САЕ-пакет позволяет моделировать кинематику, динамику и напряженно-деформированное состояние механизмов и узлов деталей машин [4]. Для сравнения кинематических характеристик использовался привод с накатным (полученным по авторской методике) и нарезным (полученным по стандартной методике) зубчатым колесом.
Необходимо отметить, что при численном моделировании кинематики зубчатого привода принимаются следующие допущения: отсутствует погрешность шага зубчатого колеса, полученного резанием, отсутствуют деформации профилей колес под нагрузкой, не учитываются технологические зазоры, не учитывается пятно контакта, материал изотропен. В модели нетпогрешности шага вследствие огрехов изготовления, обусловленных спецификой построения моделей зубчатых колес в CAD-пакетах. В связи с вышеизложенным зубчатая пара с нарезным зубчатым колесом, спроектированным по стандартной методике, выбрана в качестве эталона для сравнения.
В процессе исследования кинематики привода были проанализированы несколько пар с итеративно изменяемыми параметрами геометрии как профиля накатываемого колеса путем смещения накатника в процессе формообразования, так и накатника. В качестве начальных параметров для моделирования была взята зубчатая пара со следующими параметрами: m =0,3 мм, z 1 = 198, z 2 =76, x 1 и x 2 =0.
Все варианты моделировались с одинаковыми граничными условиями. В качестве граничных условий на шестерне задано вращение со скоростью 6 000 град/с
(1 000 об/мин). На колесе задан моментсопротивления 1 Н·м и демпфирование 0,001 Н·м. Перемещения шестер-нииколесаво всех направлениях запрещены (рис. 1).
В качестве параметров решателя заданы:
– точность позиционирования – 1 · 10–5 м;
– точность вращения – 1 · 10–4 град;
– точность сборки – 1 · 10–6 м;
– точность связывания – 1 · 10–4 м;
– количество значимых цифр–6;
– время интегрирования – 5 · 10–6 с.
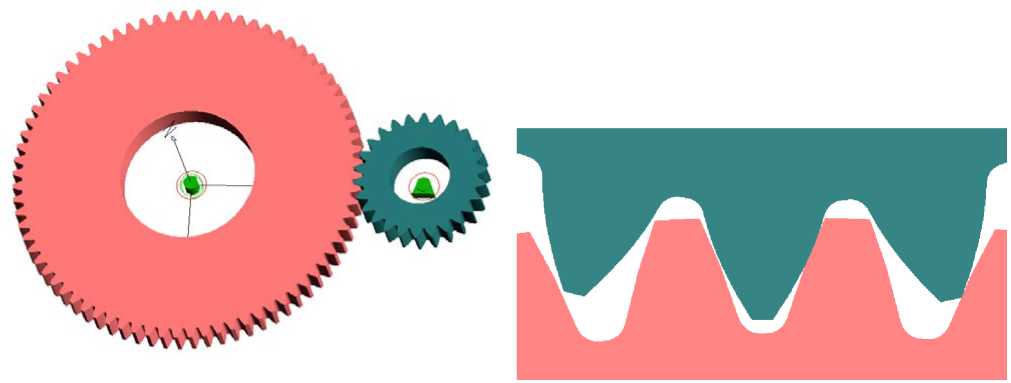
Рис. 1. Модель для исследования кинематики зубчатой пары в MSC.VisualNastran
Параметры материала колес:
– плотность – 7 850 кг/м3;
– модуль упругости – 2.1 · 1011 Па;
– коэффициентПуассона – 0,29;
– коэффициентреституции – 0,7;
– коэффициенттрения – 0,15.
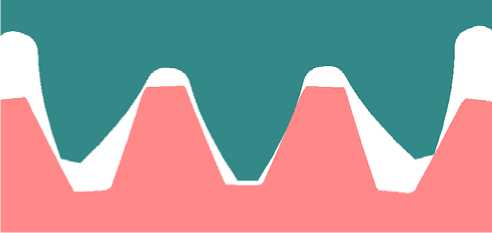
Транслирование геометрии колеса, полученного накатыванием, из MSC.Marc в MSC.VisualNastran напрямую из-за специфики пакетов не представляется возможным. Для этого координаты узлов деформированной конечноэлементной сетки передаются в CAD-пакет Solidworks. Далее при помощи сплайнов происходитвосстановле-ние геометрии колеса. В данном случае неизбежно воз-никаютпогрешности при аппроксимации. Также погрешность возникает в процессе моделирования формообразования накатыванием (из-за постоянного перестроения конечно-элементной сетки происходит «сглаживание» острых кромок) (рис. 2). При визуальном сравнении нарезного (рис. 2, а ) и накатного (рис. 2, б ) колеса видны различия в геометрии. Отличается впадина и вершина зуба – накатной зуб более прямой и имеет сужение вершины. Это сказывается на характере передачи движения и величине бокового зазора.
В качестве основного результата моделирования получаем график изменения угловой скорости колеса (град/с) за время (с) (рис. 3). Так как угловая скорость шестерни – величина постоянная, то разделив угловую скорость колеса на угловую скорость шестерни, получаем график изменения передаточного отношения, идентичный изменению угловой скорости колеса.
В проведенных численных экспериментах моделировалось взаимодействие накатного колеса шестернями, нарезанными с различными коэффициентами смещения. Экспериментальным путем было установлено, что переходные процессы, возникающие в начальный момент движения, заканчиваются за 0,005 с. Все приведенные результаты сравнивались на временном отрезке 0,01 с. За это время в зацепление входят 5 пар зубьев.
а
б
Рис. 2. Сравнение геометрии пар с нарезным ( а ) и накатным ( б ) зубчатым колесом
В результате было промоделировано 10 вариантов с различными параметрами (табл. 1). После каждой итерации производилась оценка результатов и определялись параметры следующего решения.
На графике изменения угловой скорости колеса видны значительные колебания (см. рис. 3). Среднее значение угловой скорости составляет 1 699,47 град/с. Среднее арифметическое отклонение (величина, показывающая среднюю величину отклонения угловой скорости отее среднеарифметического значения за анализируе-
Таблица 1
Параметры колес
|
Параметры |
Варианты |
|||||||||
|
1* |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
|
|
Коэффициентсмещения накатника |
– |
0 |
0 |
0 |
0 |
0,1 |
–0,1 |
–1 |
–2 |
–0,5 |
|
Коэффициентсмещения колеса |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
Коэффициентсмещения шестерни |
0,3 |
0,3 |
0,5 |
0,7 |
0,95 |
0,95 |
0,95 |
0,95 |
0,95 |
0,95 |
* – эталонное нарезное колесо мый период времени) для данной передачи составляет 58,07 град/с.

Рис. 3. График изменения угловой скорости колеса ( x 1 = 0,3)
График сравнения результатов моделирования кинематики зубчатых пар с накатными колесами представлен на рис. 4.
Использование оригинальной методики проектирования накатных зубчатых передач [5] приводов космических аппаратов позволяет оптимизировать геометрию колеса по заданным параметрам. В процессе перебора вариантов (табл. 2) можно наблюдать степень влияния таких параметров, как коэффициенты смещения на накат- нике, коэффициенты смещения на колесе, межосевое расстояние, на колебания угловой скорости.
Предложенная методика предполагает итеративное приближение к заданным показателям качества. Проведенные исследования показали возможность управлять качественными показателями накатных зубчатых колес на этапе проектирования. В результате итерационного изменения параметров накатного зубчатого колеса удалось более чем в два раза повысить плавность хода передачи.
