Исследование компромиссного оптимума в MATLAB

Автор: Кибардин В.В., Ковалева О.А., Язев В.Н.
Журнал: Вестник Красноярского государственного аграрного университета @vestnik-kgau
Рубрика: Энергообеспечение и энерготехнологии
Статья в выпуске: 8, 2014 года.
Бесплатный доступ
В статье рассмотрен синтез корректирующего устройства для электромеханического объекта третьего порядка. Разработаны математические модели и приведены результаты моделирования в среде MATLAB + Simulink.
Математическая модель, модульный оптимум, симметричный оптимум, компромиссный оптимум
Короткий адрес: https://sciup.org/14083860
IDR: 14083860 | УДК: 621.3.001.5
Текст научной статьи Исследование компромиссного оптимума в MATLAB
Введение и задача исследования. Для электромеханических объектов второго-третьего порядков рекомендуется выбирать структуру и параметры регулятора по критериям модульного (МО) и симметричного (СО) оптимумов. Критерий МО обеспечивает плавные и быстрые переходные процессы по заданию и медленные по возмущению, критерий СО – быстрые по возмущению и затянутые, с перерегулированием до 54 %, по заданию. Для систем, регулятор которых выбран по критерию СО, рекомендуется включать на входе системы управления фильтр (апериодическое звено первого порядка) с постоянной времени 4Т μ , где Т μ – малая постоянная времени контура. Это позволяет снизить перерегулирование по заданию до 8–10 % [1–3].
Указанные недостатки критерия СО можно устранить, если ввести дополнительно встречнопараллельную коррекцию, которая обеспечит наилучшие динамические характеристики как по заданию, так и по возмущению, при малой чувствительности к вариациям параметров объекта управления. Такая задача называется синтезом регулятора по критерию компромиссного оптимума (КО) [3]. Решать её будем методами математического моделирования в MATLAB+Simulink [4].
Результаты исследования. Рассмотрим две системы управления. Первая (рис. 1) состоит из П-регулятора ( Wcmo) , структура и параметры которого выбраны по критерию МО и объекта управления (инерционное звено первого-второго порядка Wi с малой постоянной времени Т µ и интегрирующее звено Wm с большей постоянной времени Т 0 ) , на входе которого возможно появление возмущающих воздействий f
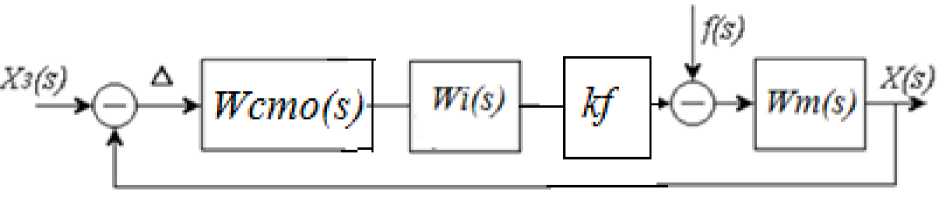
Рис. 1. Структурная схема системы управления
Вторая система (рис. 2) имеет регулятор Wсso , структура и параметры которого выбраны по критерию СО, объект и корректирующее устройство. Задача последнего – обеспечить переходный процесс по заданию в соответствии с критерием МО.
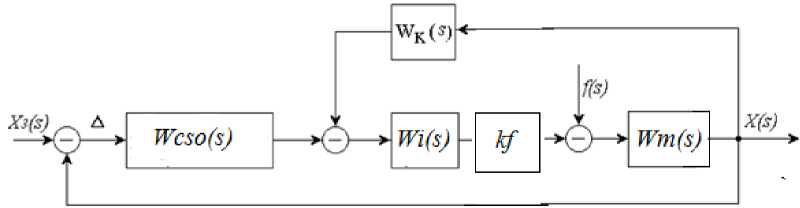
Рис. 2. Структурная схема системы управления с корректором
Для выполнения этого требования необходимо равенство передаточных функций разомкнутых систем по заданию (f = 0), представленных на рисунках 1 и 2
Wim(s)
1 + Wim(s) * Wk(s)
Wcmo(s) * Wim(s) = Wcso(s) *
где Wim(s) = Wi(s)*kf*Wm(s). Следовательно, передаточная функция корректирующего устройства Wk(s) = 1-- * ( Wcso(s^ - 1) .
Wim(s) Wccmo(s)
Будем считать, что
26.67 1
Wi(s) = ; kf = 1.36; Wm(s) = , kds = 0.055;
0.0002s2 + 0.02s + 1 1.3s
0.08s + 1
0.0049s .
Wcmo(s) = 16.2914; Wcso(s) =
Тогда передаточная функция корректирующего устройства
Wk(s) = 1.546e-008 sA3 + 9.134e-005 sA2 + 0.009057 s + 0.449.
Так как коэффициенты передаточной функции при s3 и s2 малы, принимаем, что
Wkk(s) » 0.009057s + 0.449 =0.449* (0.02s +1) = k(Tps+1), где k =T o /(4Tpk p ); k p - коэффициент передачи разомкнутого контура при единичной обратной связи .
Такое корректирующее устройство технически легче реализовать.
На рисунках 3–6 представлены структурные схемы систем с регуляторами МО, СО, СО + корректор МО и системы с фильтром.
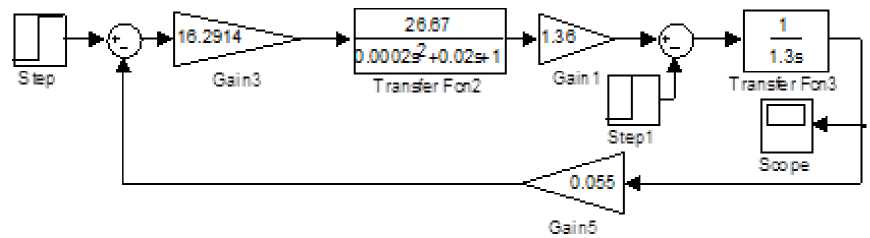
Рис. 3. Система с регулятором МО
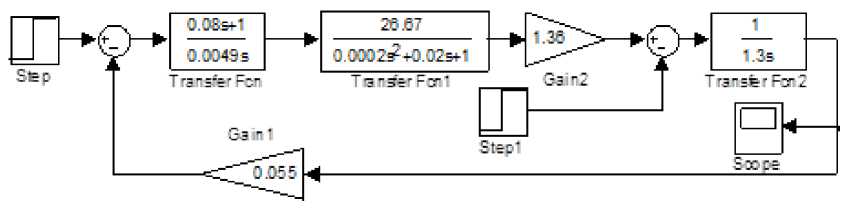
Рис. 4. Система с регулятором СО
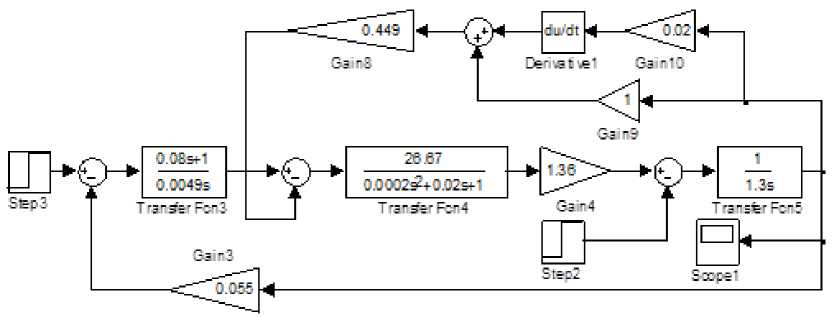
Рис. 5. Система с регулятором СО и корректором МО
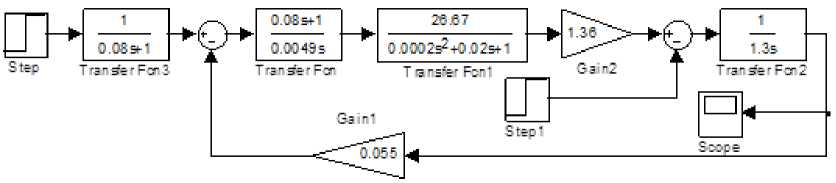
Рис. 6. Система с фильтром
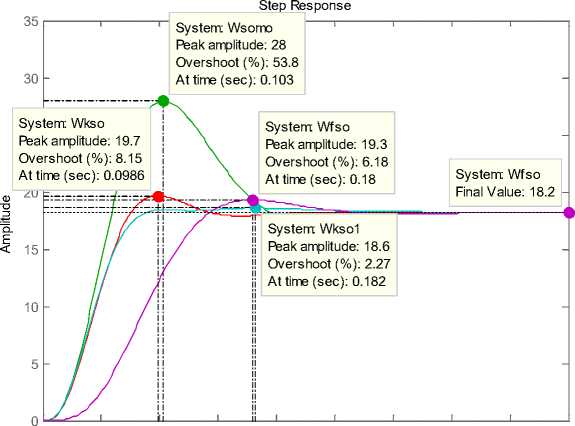
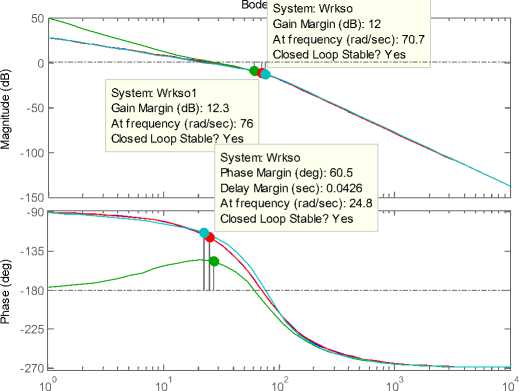
Прямые и частотные показатели качества систем управления оценим по переходным характеристикам (рис. 7) и диаграммам Боде (рис. 8). Результаты анализа представлены в таблице.
С помощью структурной схемы, представленной на рисунке 9, были получены переходные характеристики по возмущению f (рис. 10) для систем, регуляторы которых были синтезированы с помощью критерия МО (Wfmo), CO (Wfso) и СО+корректор МО (Wfkso). Результаты моделирования также представлены в таблице.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
Time (sec)
Рис. 7. Переходные функции систем, настроенных по критерию МО (Wmomo),СО (Wsomo), с фильтром (Wfso,критерий СО), с корректором (Wkso, критерий СО, корректор МО) и корректором Wk(s) = 0.449(0.03s+1), Wkso1
Frequency (rad/sec)
Рис. 8. Диаграммы Боде систем управления
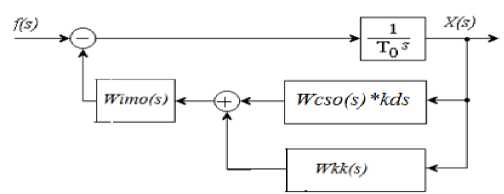
Рис. 9. Структурная схема системы по возмущению
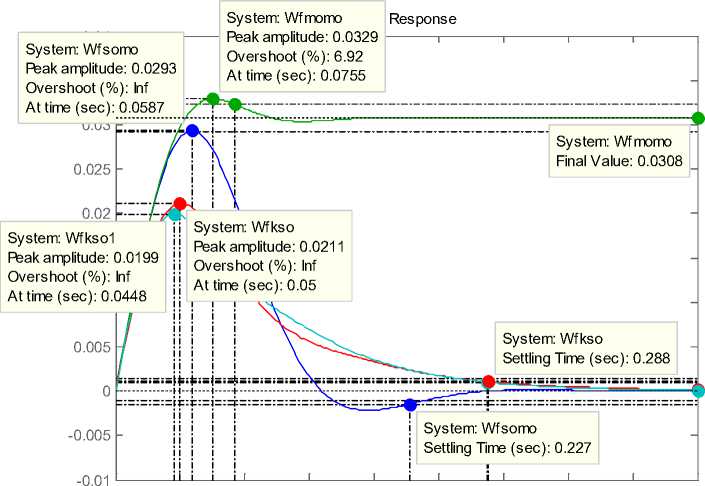
Рис. 10. Переходные функции систем управления по возмущению
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45
Time (sec)
Прямые и частотные показатели качества систем управления по заданию
|
Система |
По заданию |
По возмущению |
|||||
|
t p ,c |
σ, % |
ΔL, д.б. |
Δφ, град |
t pf , c |
σ f , % |
ε |
|
|
МО-МО |
0,119 |
8,15 |
12 |
60,5 |
0,092 |
0,0329 |
0,0308 |
|
СО-МО |
0,182 |
53,8 |
9,52 |
32,7 |
0,227 |
0,0293 |
0 |
|
СО-МО с Ф |
0,202 |
6,18 |
- |
- |
- |
- |
- |
|
СО-МО+К |
0,119 |
8,5 |
12 |
60,5 |
0,288 |
0,0211 |
0 |
|
Wk(s) =0.449(0.03s+1) |
0.076 |
2.27 |
12.3 |
65.9 |
0,288 |
0,0191 |
0 |
Выводы. Все системы имеют нулевую статическую ошибку по заданию, но лучшими по прямым и частотным показателям качества являются системы с корректирующим устройством – параллельным соединением пропорционального и дифференцирующего звена.
Если система с регулятором МО является статической по возмущению, то другие системы астатические. Переходная характеристика по возмущению систем с корректором без колебаний, что важно для электромеханических объектов, хотя длительность переходного процесса возрастает.
Оптимальные статические и динамические свойства, как по заданию, так и по возмущению, в условиях задачи имеет система с корректором, постоянная времени которого находится в диапазоне (1,3–1, 5) Т μ .
Рассмотренная коррекция равноценна введению ПИД-регулятора в контур скорости, система обладает большей устойчивостью по сравнению с нескорректированной. Тем самым обеспечивается меньшая чувствительность динамики контура к изменению параметров Т 0 , Т µ и коэффициента передачи разомкнутого контура [3].
Листинги программ в MATLAB приведены в приложении.
