Исследование магнитоанизотропных ключевых элементов для системы контроля тягового электродвигателя

Автор: Дубинин А.Е., Капитуров Р.Е., Дубинин А.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 4-1 т.12, 2010 года.
Бесплатный доступ
Рассматриваются магнитоанизотропный ключевой элемент и его математическая модель в двумерном пространстве. При этом управляемый магнитопровод заменяется эквивалентной пластиной в электромагнитном поле при силовом воздействии на нее, математическая модель которой описывается системой дифференциальных уравнений теорий электромагнитного поля, ферромагнетизма и упругости. Для магнитной цепи ключа составляется схема замещения, которая описывается системой алгебраических уравнений. Решение систем дифференциальных и алгебраических уравнений позволяет определить электрические и магнитные параметры ключа, а также построить его выходную статическую характеристику.
Информационно - измерительная система контроля, тяговый электродвигатель, щеточно - коллекторный узел, магнитоанизотропный ключевой элемент, магнитопровод, выходная статическая характеристика, output statiс characteristic, напряженная магнитоанизотропная структура, математическая модель
Короткий адрес: https://sciup.org/148199386
IDR: 148199386 | УДК: 621.318.134
The study of magnetic anisotropic key elements for the traction motor control system
The magneto-anisotropic key element and its mathematical model are studied in the two dimensional space. The magnetic conductor under control is replaced with an equivalent wafer in the electromagnetic field affected by force action; the wafer's mathematical model is described as the system of differential equations according to the electromagnetic field theory, ferromagnetism, and the elasticity theory. For the key magnetic circuit there is an equivalent circuit which is represented by the system of algebraic equations. The solution of differential and algebraic equations enables us to identify electric and magnetic parameters of the key and to build its output statiс characteristic.
Текст научной статьи Исследование магнитоанизотропных ключевых элементов для системы контроля тягового электродвигателя
Тел. (846) 995-54-13
лировочного винта 1, нажимных пластин 4, 5 и пружины 2. Нажимной элемент выполнен в виде набора сепараторов 7 с выступами, входящими в пазы 10 корпуса 3 для исключения продольного смещения, стальных шариков 6, которые помещены между магнитопроводами 8, 9.
Пластина 4 через пружину 2 связана с регулировочным винтом 1, устанавливающим её сжатие и определяющим величины усилия через шарики 6 на магнитопроводы 8, 9 и корпус 3. Под действием усилия в магнитопроводах возникают внутренние механические напряжения, которые фиксируют магнитные домены в определённом направлении и приводят магнитопроводы в начальное магнитное состояние, определяющее выключенное состояние ключа. При подаче напряжения на обмотку управления домены управляемых магнитопроводов меняют свое направление и остаются фиксированными с помощью
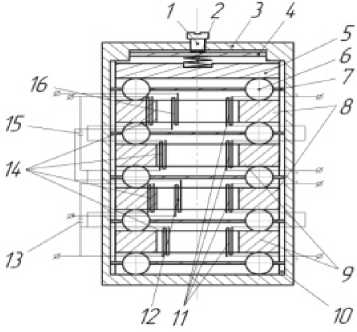
Рис. 1. Магнитоанизотропный ключевой элемент системы контроля ТЭД усилий, определяя включенное состояние. Выключенное состояние определяется подачей обратного напряжения на обмотку управления или его снятием [3].
Математическая модель МКЛ описывается уравнениями теории электромагнитного поля, ферромагнетизма и упругости. Решение этой модели в трехмерном пространстве связано с непреодолимыми трудностями. Поэтому задача реализации модели была сведена к двумерной. При этом управляемый магнитопровод заменяется эквивалентной пластиной в электромагнитном поле при силовом воздействии на нее, и вводятся следующие допущения [1].
-
1. Магнитные индукции внешних электромагнитных полей, в которых находится пластина, изменяются по синусоидальному закону;
-
2. Магнитные поля возбуждения и управления равномерны и имеют только нормальную составляющую магнитной индукции B z + B zo ;
-
3. Комплексная магнитная проницаемость Ца напряженной магнитоанизотропной структуры (НМАС) пластины зависит от значений механических напряжений у силы P , ип = f ( P ) ;
-
4. Плотность токов ( ^ x + 5 xQ Х ^ , + 5 ур ) по толщине с пластины не изменяется, что имеет место при с/(2А) < 0,5 , где А - эквивалентная глубина проникновения электромагнитного поля в пластину;
-
5. Тангенциальные составляющие напряженностей электрического поля ( Ea + E ao ) и ( E b + E bo ) на гранях пластины постоянны;
-
6. Поля выпучивания, идущие в обход пластины, относятся к полям рассеивания;
-
7. Механическая сила P (напряжение у ) направлена к магнитному полю ( Bz + Bz o ) в одной нормальной к пластине плоскости;
-
8. Среда пластины анизотропна.
Физическая модель на рис. 2, с учетом принятых допущений в двухмерном пространстве при одновременном воздействии силового поля и полей возбуждения и управления описывает-
- -
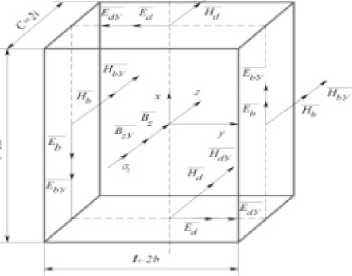
Рис. 2. Модель управляемого МКЛ при сжатии
H z ( y , x ) = 1 H b
H zy ( y , x ) = 1 H b
ся следующими дифференциальными уравнениями в декартовых координатах [1, 2]:
а ( я , + и ,у )
д --- = Y x
5 у
» H + H zy 1
5 x
= Y y E + E yy ) ;
5 E + E yy ) д ( E x + E y )
"Z=- = j(WH -OuJL ) ; (3)
5y ----
(®. B ) H ^H
V - z -У 7 7
+
“ ' ; (4)
z^z 7
z
5v
E = о
5 z z ’
где Y x , Y y , — электрические проводимости НМАС по соответствующим координатам x, y ;
Еx, Еу, ЕxУ, ЕуУ – напряженности электрических полей от обмоток возбуждения и управления соответственно по осям x , y ; Нz, НzУ – напряженности магнитных полей от обмоток возбуждения и управления соответственно по оси z ; Вz, BzУ – магнитные индукции обмоток от возбуждения и управления соответственно; ®=® У - круговые частоты полей возбуждения и управления; ст - нормальные механические напряжения в НМАС; Ца - магнитная проницаемость от механических напряжений о ; v - перемещение точки структуры по оси z .
Граничные условия при этом имеют вид:
H z ( У ) при x ± а ;
H z ( X , У ) =j H a 0
при x = ± а; у = 0; при у = ± b ;
' H zy ( у ) при x ± а ;
H zy ( x , У ) =1 H a
при x = ± a; y = 0; при y = ± b ;
H z ( x ) при y = ± b ;
при y = ± b; x = 0; при x = ± а ;
' H z y ( x ) при y = ± b ;
при y = ± b; x = 0; (7) при x = ± а ;
0 при t < t1;
H zy ( x ) =
H 11 z max
при t 1 < t < t 2 ;
при t > t 2 ;
0 при t < t 1 ;
H zy ( У ) = 1 H z max при t 1 < t < t 2 ;
0 при t > 1 2 ;
где a и b – размеры пластины; t – время срабатывания магнитоанизотропного ключевого элемента; t1, t2 – время включения и выключения магнитоанизотропного ключевого элемента (рис. 4)
Решение уравнения ферромагнетизма (4) в литературе известно и его решение имеет вид [1, 2]:
Mk -My = Мн-AM. + AMy -Мн + AM. = AM.- (9)
2,25 XaM2 p где А м = ——,5 '— - изменение магнит- г a 2 n 2 * 2 1
П B tj ной проницаемости НМАС, созданное механическим напряжением у усилия P; ДмУ – изменение магнитной проницаемости НМАС, созданное полем обмотки управления; Mi = BIH и находится по зависимости: в = f (H) – начальная магнитная проницаемость НМАС управляемого и компенсационного элементов от обмотки возбуждения; μУ и μк – магнитные проницаемости НМАС управляемого и компенсационного элементов; X - изотропная магнитострикция; a – коэффициент намагниченности; B – магнитная индукция ; tк и l – ширина и толщина кольца (пластины).
Совместное решение (2) - (4) дает
Xx , Xy , Xyy , Xxy - постоянные распространения электромагнитной волны в материал НМАС от силового поля, обмотки возбуждения и обмотки управления; А x , А y , А xy , А y y - эквивалентные глубины проникновения электромагнитного поля в материал НМАС от силового поля, обмотки возбуждения и обмотки управления; ψ =π/4 -β/2 – фазовый угол между индуктированной ЭДС и вихревым током; в - угол магнитных потерь.
Поскольку постоянные (11) есть величины комплексные, то решение уравнения (10) ищется в комплексном виде через круговые и гиперболические функции [1]
'( ( H z + H zy )( x , у ) ) = Ach (X x + X xy ) x cos qy
( < H z + H zy )( у , x ) ) = B ch(X y + X yy ) y cos px ; (12)
Из условий (7) - (9) определяются постоянные А и В , которые подставляются в выражения (1.12), преобразуя их к виду
( ( H z + H zy ) ( x , y ) ) = ( H a + H ay ) C h^ Z x + X xy ) x cosqy ch^ X x + X xy ) a
( ( H z + H zy ) ( y , x ) ) = ( H b + H by ) ch X y + X yy ) У cos px ; (13)
[---- ch^ y + X yy ) b
Третьи условия из (7) - (9) удовлетворяются при qb=pa=рn/2 .
((Hz + Hzy У a, У)) = Ё (b« + b»y ) C0S ^ 3 X У n=1 2(b + by )
f 9 2 ( H z + H zy. ) )
l x 2 J
( H z + H ) J l У 2 J
( \ \ ^
Hz + Hzy Ab,x))=E(an i =1
+ a ny )C0S
n n
2( a + ay )
;(14)
= ( H z ( x, y )+ H zy ( x, y ) )+( H z ( y , x )+ H zy ( y , x ) )
;(10)
где an , anУ и bn , bnУ коэффициенты Фурье ( n =1, 3, 5…), определяемые формулами [1]
где
(Xx + Xxy ) = ^ Y (M. + My) = (А J ) ej
( X y + X yy ) = V N, (M. + M y ) = ( А + 1 А ) e j
( a n + a ny ) =
2( a + ay )
f 4(H^'J l nn J
+ ( a + a y )
J ( H z + H zy ) ( b , x )
- ( a + a y )
n nx cos
2( a + ay )
( bn + b y ) =
. nn sin—
+ ( b + b y )
----- ( H + H ) (aa, y )cos——— 2( b + by ) . ( 2 b y z^LV " 2( b + by )
( А x +А xy ) = , ,1 .
v (M. + My )
(а y + А yy ) = I • ( \
J®/( (M. + My )
f 4(H^ J l nn J
. nn sin
Из выражений (12) - (15) окончательно находятся значения
( ( H z + H zy ) ( x , y ) ) = ( H a + H ay ) ch ( X x + X ) x Ф п ( y )
-- --- --- ---- ch ( X x + X x, ) a
( ( H z + H zy ) ( y , x ) ) = ( H b + H by ) ch (( X y + Х / У Ф п ( x ) ;(16)
— --- — --- ch (Xy + Xy,)b и тогда уравнение (10) принимает вид
Единичные функции (20), представляющие граничные условия, существенного влияния на результаты анализа не оказывают [2] и могут быть положены Ф п ( x ) = Ф п ( y ) = 1 .
Вихревые токи в эквивалентном контуре L y = 2( t y + l y ) НМАС находятся путем интегрирования выражений (18):
( H z + H zy ) = ( H a + H ay ) ch ^^^^. ф п (y ) + — --- — --- ch ( X x + X x, ) a
, И A ch ( X y + X yy ) y , .
+ ( H b + H by ) --- y—T Ф п ( x )
--- ---- ch ( X y + X yy ) b

( a + a y )
+ U ) = c J ( £ y + S y, ) dx =
c ( E a + Ea, ) cha - 1
P ( X + X , ) sh ( X + X , 'a
( b + b , )
+ Ij bY ) = c J ( S x + S x, ) dy =
c ( E b + Eb , 1 chb - 1 . p ( x + X , ) sh ( X + X , ) b’
а уравнения (2), (3)принимают вид для плотно стей токов 5 + 5 xy ) и ( f y + 5 yy ) :
Сопротивления НМАС вихревым токам определяются с учетом выражений (19), (21), (22):
s l d H ( y ’ x ) z + H ( y ’ x ) zy ) )
5 + 5 ) =V d y 7
sh ( X y + X yy ) y . A
= -Y x E + E by iV---. Ф п ( x ) sh ( X + X ) b
( Z tB + Z B У ) = Э t / ( I B + 1 tB y ) = / э \p ey >'
c ( a E + a E У )
( Z IB + Z B У ) = ЭI / ( I B + 1 IB У ) =
t-э p ej' ^ ; c ( bE + b E У )
S y + 6 уу
) p( H ( x , y ) z + H ( x , y ) zy ) ' 2 5 x ,
(23) полное сопротивление вихревому току запишется как сумма выражений (23)
V
= -у , (e„ + E a, ) sh ( X x + X xy ) •x Ф п ( y )
— --- sh ( X x + X xy ) a
= ;(18)
( Z B + Z b, ) = 2 p l^ 2. e j ^ a V c ( aE + aE, )
/
+______12______ e j ^ b
c ( bE + bE, )
где
( E L + E a, ) =- ( P y X x ( H a + H ay ) h X xa ) =- j to V B^ + B ay ) a B
( E + E by ) = - ( p x X y ( H b + H by ) h X b ) = - j m ( B b + B by ) aB ;(19)
(24) где с – удельное электрическое сопротивление НМАС МКЛ; tэ , lэ – стороны эквивалентного контура вихревых токов; aЕ , bЕ , aЕУ , bЕУ – эквивалентные глубины проникновения электрического поля в НМАС от силового поля и обмоток возбуждения и управления, соответственно; с – средняя длина пути магнитного потока,
. 4 1 - пп пnx ф.(x) = —L '"' .cos — п 7Г । п 2 2 a
4 1 . п п п пу
Ф п ( y ) = —L —sm 7-cos tit; (20)
п 7~ 1 п 2 2 b ’ v z
B a , Bb , BaУ , BbУ – комплексы действующих индукций в НМАС от обмотки возбуждения и от обмотки управления, равномерно распределенных на эквивалентных глубинах aB и bB , которые позволяют найти участки lэ и tэ эквивалентного контура Lэ вихревых токов.
В эквивалентном контуре НМАС действует ЭДС
V a , V b , V a, , V by - углы сдвига между вихревым током и ЭДС по соответствующим направлениям эквивалентного контура НМАС от обмоток возбуждения и управления, соответственно.
Эквивалентные глубины проникновения электрического поля в НМАС определяются с учетом выражений (11)
( a E
+ a E У
) = b + bE у== -
E E У k
chK 1
chK 1
- cos K 2
+ cos K 2
;(25)
Э = Э + 3 y , (21) где Э = 2 ( Eat э + Еь1э ) = - ]шф - ЭДС от обмотки возбуждения;
Эу = 2( Ea y t э + E by 1 э ) = - ,1 а фу - ЭДС от обмотки управления.
где
K = a I A = a xjту ( ца + p , ) ;
K 1 = K cos(п 14 - вI2);(26)
K 2 = K sin( п 14 - в 12) ;
у = 1I p = у cos у - jy sin у ;(27)
R - B m H c (pi - P- )
в = arcsin ----———---- - угол магнит-
16 пВ ных потерь[1; 2],
Bm – магнитная индукция; Hc – коэрцитивная сила.
Углы сдвига между вихревым током и ЭДС.
cos y а = cos y b
K 1 shK 1 + K 2 sin K 2
K-^sh2 K 1 + sin2 K 2
При отсутствии поверхностного эффекта, что имеет место при K = а^ ю ( цд + ц у ) у < 0,5 , эквивалентные глубины проникновения электрического и магнитного полей равны ( Ьв + Ьву ) = Ь ;
sin Уa = sin Уь
K 2 shK 1 + K 1 sin K 2 ; (28) ky/sh2 k 1 + sin 2 k 2
Сопротивления НМАС магнитопровода намагничивающему току от силового поля и обмоток возбуждения и управления 1ф = c H по со-
( а в + а ву ) a , ( ЬЕ + ЬЕу ) ( a E + аЕу ) 0-5( ав + аву ) , а магнитная индукция распределяется равномерно по сечению элемента в с = в ( а в + а ву )/ а [1]. При этом можно пренебречь составляющими, пропорциональным круговым функциям в выражениях (1.28) (1.32). Тогда
ответствующим направлениям эквивалентного контура определяются с учетом выражений (19) и (21)
(7 .7 \ ^Э В( (Цд + Цу ) e
\ ZtФ + Z tФФ = с
К ™ЧЬ в (М д + М у ) e^ ’ (29) \ Z № + Z lФФ = с
cos y = sin a = K 2 / K = sin( ^ /4 - в /2)
cos a = sin y = K 1 / K = cos( n /2 - y ) ; (33)
С учетом изложенного, сопротивление вихревому току (25) НМАС магнитопровода, приведенное к виткам соответствующей обмотки, приобретает вид:
( Zb + Z hV ) = p
а полное сопротивление НМАС магнитопровода намагничивающему току от силового поля, обмоток возбуждения и управления запишется как сумма выражений (29)
7 + Z . 2 НЦ с Ц ) ( t , ( aB + aB y e + l , ( Ь в + ЬВ у e ) ;(30) где ab , bb , abУ , bbУ – эквивалентные глубины проникновения магнитного поля в НМАС от обмотки возбуждения и обмотки управления; ц у , цу -магнитные проницаемости пластины от механического усилия и поля управления; a a , a b , ааУ ьуьу – углы сдвига между намагничивающим током и магнитным потоком по соответствующим направлениям эквивалентного контура от силового поля и обмоток возбуждения и управления соответственно.
Эквивалентные глубины проникновения магнитного поля определяются с учетом выражений (11)
L э c ( а Е + а Еу )
k 2 ej
где L , = t + 1 - длина эквивалентного контура вихревых токов; t=2b , l=2a – ширина и толщина пластины; kп – w/wУ коэффициент приведения сопротивления управляемого элемента к соответствующей обмотке w .
Активная и индуктивная составляющие сопротивления вихревому току равны
( г в + г ву ) = ( Z в + Z ву ) cos y
( х в + х ву ) = ( Z в + Z BУ ) sin y
( 2 ф + Z ФУ ) = to( S 3 + S эу ) ( Ц д + Ц у ) k„2 ej a ; (36)
где ( S з + S ,у ) =( S + S у ) = L , ( а в + а ву ) = tl при
отсутствии поверхностного эффекта. Активная и индуктивная составляющая ZФ .
/ \ т \ n chK 1 - cos K 2
( а в + а ву ) = ( Ь в + Ьву ) = у J“тт; ■ ;(31)
k \ chK 1 + cos K 2 Л 7
( Г ф + Г фу ) = ( Z Ф + Z фу ) sin a
( Х ф + x-фу ) = ( Z ф + Z ФУ ) cos a
; (37)
где К , К1 и К2 – определяются по (25) - (27)
( М д + Ц у ) = ( М д + Ц у ) cos a - j( М д + Ц у ) sin a .
ЭДС эквивалентного контура, приведенная к первичным виткам
Э = to BcS 3 w 1 ; (38)
Углы сдвига между намагничивающим током и магнитным потоком
cos a a
K.sh 2 K , + K, sin 2 K, = cos a в = — 1, 12 =
K-^sh 2 2 K 1 + sin 2 2 K 2
Так как сопротивления вихревым и намагничивающим токам расположены параллельно друг другу, то комплекс полного результирующего сопротивления НМАС магнитопровода определяется [1]:
sin a = sin a aB
K 2 sh 2 K 1 + K 1 sin 2 K 2 ; (32) k^sh 2 2 k 1 + sin2 2 k 2
( zp + 2ру ) =
( z ь + Z ьу ^(2 ф + 2 фу ) (( Z ^ + 2^7 ) +( | Ф + 2 Фу ))’ <39>
По аналогии определяются активная и реак- тивная составляющие (Zp + Zp, ).
При отсутствии поверхностного эффекта ( К < 0,5 ), что имеет место для НМАС из магнитомягкого феррита, глубины проникновения поля управляемого элемента и его сопротивление вихревому току от обмотки возбуждения и обмотки управления Zb и ZbУ практически не зависят от механических напряжений у силы P . Сопротивление же намагничивающему току ZФ и ZФУ изменяется при действии напряжений у и выражение (36), в зависимости от бокового сжатия НМАС кольцевого магнитопровода с учетом выражений (9) приобретает соответствующий вид [1, 2]:
® ( S3 + S3 y) f 2,25 Я$аЦ P
( 2 ф + 2 фу )= э ——I Ц-- 2 „2^ н + Ц , кe ;(40)
— --- с V п B t l J
По найденным значениям Zр находится на-
Uw пряженность магнитного поля H = —1—L и да-Zpl лее по кривой намагничивания B = f (H) находится B и начальная магнитная проницаемость Ц. = B / H , где U1 - напряжение питания преобразователя.
Для магнитной цепи конструкции МКЛ на рис. 2 составляется схема замещения, которая представлена на рис. 3.
Для схемы замещения по 2-му закону Кирхгофа составляется система уравнений[1]
'и, + U * - U. = U 1 + U , K
'u, - u, - Uz = о • <41> вателя; KУ – коэффициент трансформации обмотки управления.
После перехода к магнитным индукциям система уравнений (41) принимает вид:
' B y + B k - B c = B 1 + B y
\ B y - B k - B = 0 • (42)
где By , Bk - магнитные индукции в сердечниках управляемого и компенсационного элемента; Bc – магнитная индукция в сердечниках элементов за счет напряжения на конденсаторе; B1 – магнитная индукция в сердечниках элементов за счет напряжения питания U 1 ; Bz - магнитная индукция в сердечниках элементов за счет напряжения на нагрузке.
Выражения для магнитных индукций запишем в виде
Bv = ( Н. + Н Цу ; B = ( н. - Н ) ц У 1 2 У к 1 2 к
U 2 Hc UyK
B 1 = ^^ ; B c = 2— 2 ; By = ^-^ , (43)
®
Sw1
—
где ^ 1 - напряженность магнитного поля, со здаваемая в сердечниках управляемого и компенсационного элемента за счет протекания тока в первичной цепи преобразователя; ^ 2 - на пряженность магнитного поля, создаваемая в сердечниках элементов за счет протекания тока во вторичной (измерительной) цепи преобразователя; НУ – напряженность магнитного поля, где Uy, Uk, Uc, Uz – соответствующие напряжения на обмотках управляемого и компенсационного элемента, контурном конденсаторе С и нагрузке Z; U1 - напряжение питания преобразо-

Рис. 3. Схема замещения магнитоанизотропного ключа
создаваемая обмоткой управления; ЦУ и Цк - комплексные магнитные проницаемости управляемого и компенсационного элемента[1]; w1 и w2 – число витков обмоток возбуждения и измерительной; S – сечение магнитопроводов силоизмерительных элементов; KУ – коэффициент трансформации обмоток w1 и wУ.
После подстановки (43) в систему уравнений (42) она преобразуется к виду:
( H 1 + H y ) Ц У + ^ Ц У + Ц к V
+ ( H 2 + Hy )Ц^уу + А д У -s
( H 1 + Hy ) ( ц у + Ац у -
2 c )
^2 SCw - v
oSw1 ц, )+
+ ( H 2 + H y ) Ц у +Ц + Ц к
V
+
U 1 + U y K y
m Sw1
;(44)
cZ ^^
d S^W2 J
= о
Решением системы уравнений (42) находится напряженность магнитного поля H 2 :
H
= ( U 1 + U У K У )( µ У + Δ µ У
2 =
2 c 2
- µ k ) ω Cw 1 2 KT ;(45)
где KT = 2 – коэффициент трансформации w 1
обмоток w2 и w1 .
Выходное напряжение, снимаемое с Zн , записывается выражением
U í = I 2 Z í
H 2 c
Zí w 2 ,
которое после подстановки в него выражения (1.45) приобретает вид:
( U 1 + U У K У )( µУ + Δ µУ - µk ) ω Cw 1 U н =
2 c
1 Z н ;(47)
V 2 J s Δ H 2 0,89 π 2 B 2 t 2 lU У
= β ' = λ Cβα 2 µ 2 PK ω Sw . (50)
sн з
Скорость смещения доменных границ определяется с учетом (1.50) выражением [1]
t = Δс = λsCαs2µн2PKзωУSwУ ср V 0,89π2B2t2lUУ ; (51)
где β ' = 2 πµ 0 λ p γ / 2 υ 2 A – коэффициент затухания движения границ доменов [1]; λ p – релаксационная частота; γ – плотность граничной энергии; υ – магнитомеханическое отношение; А – обменный параметр; µ 0 – магнитная постоянная. Время срабатывания ключа определяется временем установки доменов под действием магнитного поля Δ H 2 , т.е. временем удлинения магнитопровода ключа Δ c под действием Δ H 2 и определяется с учетом (51) выражением:
На выходе обмоток 11 появляется максимальный сигнал, который на Zн определяется выражением (47) с учетом выражений (9) и имеет вид:
t = Δ с = λ sC α s 2 µ н 2 PKз ω УSwУ ср = V = 0,89 π 2 B 2 t 2 lU У ;
U н
1,125( U 1 + UУ KУ ) λ s α s µ н ω w 1 P π 2 B 2 t 2 lc
Исходя из равенства потерь в магнитопроводе и обмотках ключа можно приближенно определить максимальную коммутируемую мощность:
Z н , (48)
Из выражения (47) видно, что для перевода ключевого элемента во включенное состояние необходимо, чтобы Δ µ у ≥Δ µ . Это условие позволяет определить величину напряжения, приложенного к обмотке управления:
Q k . max
fB s Q a S 21012
1,5 δ G ;
U У = К з Δ µ У H 2 ω У Sw У , (49)
где ωу – круговая частота управляющего напряжения; wу – число витков обмотки управления; Кз =1,3 – коэффициент запаса, обеспечивающий надежное срабатывание ключа.
При выключении МКЛ UУ=0 все вышеприведенные выражения упрощаются и параметры связанные с этой обмоткой становятся равными нулю, фиксируя выключенное состояние.
Изменение магнитного поля ΔН под действием напряжения на обмотке управления UУ находится из выражения (49), которое после подстановки в него выражения (9) принимает вид:
где f – частота; Bs – индукция насыщения магнитопровода; Qa – потери в магнитопроводе; S – сечение магнитопровода; G – вес магнитопровода; δ – плотность тока в обмотке.
Разработанная методика была использована для расчета МКЛ на ферритовых кольцах 10 П б П 4,5 мм марки 2000 НМ1 при следующих исходных данных: U1 =4,5 B; f = fУ =40 кГц; UУ =0,8 В; Pmax =50 Н; w1 = wУ =50; w2 =100; С =50 пФ.
Используя выражение (48) для данного МКЛ построена расчетная выходная статическая
характеристика Uн = f ( UУ ) , которая представлена на рис. 4 совместно с экспериментальной зависимостью.
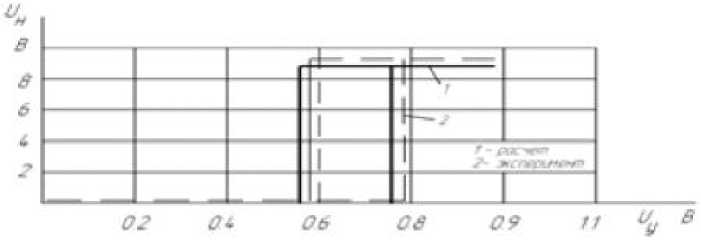
Рис. 4. Выходная статическая характеристика МКЛ U = f ( UУ )
Параметры включения и выключения на рис. 4 отличаются друг от друга вследствие внутренней вязкости феррита, т. е. наличия гистерезиса.
В результате теоретических и экспериментальных исследований установлено, что сходимость выходных характеристик не превышает 5%.
Список литературы Исследование магнитоанизотропных ключевых элементов для системы контроля тягового электродвигателя
- Дубинин А. Е., Кислицын А.Л. Магнитоанизотропные устройства автоматизированных систем. Ульяновск: УлГТУ, 2004. 372 с.
- Дубинин А.Е. Магнитоанизотропные преобразователи силы. М.: Энергоатомиздат, 1991. 112 с.
- Патент на полезную модель № 81861 Российская Федерация МПК Н03К 17/00. Ключевой элемент/Ду! бинин А. Е., Капитуров Р. Е., Бородина А. В.; 2009. № 9.
