Исследование маневренных возможностей орбитального самолета при спуске в нештатных ситуациях

Автор: Лазарев Ю.Н., Баяндина Т.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Управление и моделирование в сложных системах
Статья в выпуске: 1 т.2, 2000 года.
Бесплатный доступ
Исследуются маневренные возможности орбитального самол ета при спуске в атмосфере в нештатных ситуациях, связанных с прекращением его выведения на орбиту спутника Земли. Рассчитаны области достижимости и области возможного попадания с уч етом ограничений на управление, режимы движения в атмосфере и терминальные условия.
Короткий адрес: https://sciup.org/148197583
IDR: 148197583
Research of maneuverable possibilities of orbit plane at descent in atmosphere in contingencies
The maneuverable possibilities of an orbit plane are researched at a descent in atmosphere in contingencies, connected with an extinction of its deduction into Earth satellite orbit. The areas of an accessibility and area of probable hit with satisfaction of limitations on control, conditions of driving in atmosphere and terminal conditions are calculated.
Текст научной статьи Исследование маневренных возможностей орбитального самолета при спуске в нештатных ситуациях
В качестве объекта управления рассматривается орбитальный самолет (ОС), который является основным элементом многоцелевой авиационно-космической системы МАКС-ОС [1]. Выведение ОС на орбиту спутника Земли осуществляется следующим образом (рис.1). С поверхности Земли стартует составной летательный аппарат, состоящий из дозвукового самолета-носителя (СН) Ан-225 и ОС с внешним топливным баком (ВТБ). После прибытия в заданную область происходит разделение СН и ОС с ВТБ. Дальнейшее выведение осуществляется с помощью маршевых жидкостных ракетных двигателей ОС до отделения ВТБ. Окончательный вывод на орбиту производится с использованием двигателей орбитального маневрирования ОС.
При возникновении нештатной ситуации на участке движения ОС с ВТБ предполагается экстренное отделение ВТБ и спуск ОС в атмосфере по траектории возвращения. Целью управления в этом случае является приведение ОС к началу участка предпосадочного маневрирования или в область параметров движения, в которой возможно срабатывание специальных средств спасения экипажа.
Управление движением ОС по траектории возвращения осуществляется изменени-
Рис.1. Траектории движения авмационно-космической системы
1 - взлет; 2 - отделение ОС с ВТБ от СН; 3 - движение ОС с ВТБ но траектории выведения; 4 - движение ОС но траектории возвращения; 5 - спуск ВТБ; 6 - посадка ОС
ем угла атаки и угла скоростного крена. При формировании управления учитываются ограничения на управляющие зависимости, режимы движения в атмосфере и терминальные условия.
Исследование маневренных возможностей ОС при спуске в нештатных ситуациях, связанных с движением по траектории возвращения, сводится к построению на высоте начала участка предпосадочного маневрирования областей достижимости и областей возможного попадания при движении из начальных условий, соответствующих параметрам рассматриваемого участка траектории выведения.
Постановка задачи
Участок траектории выведения ОС с ВТБ является множеством точек, фазовые координаты каждой из которых могут являться начальными условиями движения по траектории возвращения. Параметры выведения (скорость V , высота H , угол наклона траектории 0 , продольная дальность L от точки разделения СН и ОС) при движении ОС с ВТБ меняются в широких пределах (рис.2).
Возможность совершения маневров при спуске в атмосфере зависит от располагаемого уровня механической энергии ОС. На рис.3 показано изменение удельной механической энергии Е в зависимости от времени с момента начала движения ОС с ВТБ.
Построение границ областей достижимости и областей возможного попадания связано с формированием номинальных программ управления, обеспечивающих приведение ОС на их границы. Границы областей
Рис. 2. Параметры движения ОС с ВТБ состоят из крайних точек, в которые возможно попадание ОС при спуске по траектории возвращения, поэтому задачи формирования соответствующего управления формулируются как оптимизационные.
Таким образом, требуется сформировать оптимальные управляющие зависимости по каналам углов атаки и скоростного крена, обеспечивающие достижение ОС границ областей достижимости и возможного попадания при спуске в атмосфере по траектории возвращения с различными начальными условиями, соответствующими параметрам траектории выведения ОС с ВТБ, с учетом ограничений на управление, режимы движения в атмосфере и терминальные условия.
Метод решения
При решении задач оптимизации номинального управления использовался численный метод формирования многоканального управления движением в атмосфере, позволяющий учитывать ограничения на функционалы задачи и управляющие зависимости [2]. Численный метод разработан на основе метода последовательной линеаризации [3], который является типичным методом спуска в пространстве управлений и сводится к построению минимизирующей последовательности управлений. В результате применения численного метода формируется многоканальное приближенно-оптимальное управление.
Условия численного решения
В модели движения ОС при спуске в атмосфере учитывалась несферичность поля тяготения Земли и ее вращение вокруг собственной оси. Считалось, что рассматриваемый участок траектории выведения совпадает с плоскостью экватора. В качестве поверхности приведения принималась сфера с центром в центре Земли, проходящая на высоте 20 км над экватором.
Максимальное значение аэродинамического качества ОС на гиперзвуковых скоростях движения в атмосфере принималось равным 2,2. Аэродинамические характеристики ОС задавались таблично, также таблично задавались параметры атмосферы. Удельный
Рис. 3. Располагаемая удельная механическая энергия ОС в зависимости от времени с начала момента начала движения ОС с ВТБ тепловой поток рассчитывался в условной критической точке поверхности аппарата с радиусом кривизны 1 м.
Параметры движения по траектории выведения являлись начальными условиями спуска по траектории возвращения. Значения скорости, угла наклона траектории и высоты (рис. 2) дополнялись нулевыми значениями угла пути, широты и долготы. Во всех задачах на управляющие зависимости накладывались ограничения: угол атаки мог изменяться от 10 ° до 45 ° , а угол скоростного крена по абсолютной величине не мог превышать 80 ° .
Построение областей достижимости и возможного попадания для заданных начальных условий движения выполнялось после решения серии однотипных оптимизационных задач:
-
- безусловной максимизации конечной
продольной дальности;
-
- безусловной максимизации конечной боковой дальности;
-
- безусловной минимизации конечной продольной дальности;
-
- максимизации конечной боковой дальности при различных требуемых значениях конечной продольной дальности;
-
- максимизации конечной продольной дальности при различных требуемых значениях конечной боковой дальности;
-
- минимизации конечной продольной дальности при различных требуемых значениях конечной боковой дальности.
Все оптимизационные задачи решались с учетом ограничений на управление, а также с учетом отдельных ограничений на терминальные условия и режимы движения в атмосфере, так и без их учета.
Результаты
Результаты математического моделирования спуска ОС в атмосфере и решения оптимизационных задач приведены на рис.46, на которых показаны области достижимости и области возможного попадания в координатах продольной L и боковой D дальностей спуска. Продольная дальность отсчитывалась в плоскости экватора по поверхности приведения от проекции точки разделения СН и ОС с ВТБ на эту поверхность, а боковая - по поверхности приведения от плоскости экватора. Значения времени, проставленные на рисунках, соответствуют продолжительности движения ОС с ВТБ по тра-
D,
км
-100
-200
-300
-400
-500
Рис. 4. Области достижимости без учёта и с учетом ограничений на режимы движения в атмосфере
Рис. 5. Области достижимости для разных моментов разделения ОС и ВТБ
ектории выведения до экстренного отделения ВТБ.
На рис.4 приведены области достижимости без ограничений и с ограничениями на режимы движения в атмосфере и терминальные условия для начальных условий спуска, соответствующих 300-ой секунде движения по траектории выведения после разделения СН и ОС с ВТБ. К этому моменту времени выведения ОС обладает удельной механической энергией примерно вдвое меньшей, чем в конце участка выведения (рис.3). При построении областей достижимости учитывались ограничения на режимы движения в атмосфере: на максимальное значение нормальной перегрузки ( n ymax < 3,5 ) и на максимальное значение удельного теплового потока в критической точке поверхности аппарата ( q T max < 630кДж / м 2 с ), а также на терминальные условия: конечную скорость
( V к = 500 ± 30м / с ) и конечный угол наклона траектории ( 0 к = 10 o ± 1 o ).
На рис.5 приведены области достижимости, построенные для шести вариантов начальных условий без учета ограничений на режимы движения и терминальные условия. При построении областей начальные условия спуска соответствовали 350-ой секунде движения по траектории выведения после разделения СН и ОС с ВТБ, затем 300-ой и далее в сторону уменьшения с шагом 50 секунд до практического вырождения области достижимости в точку (в этом случае начальные условия спуска соответствуют примерно 100ой секунде движения ОС с ВТБ) .
На рис.6 показаны области возможного попадания ОС на поверхность приведения. Каждая область строилась как огибающая областей достижимости, полученных для различных моментов начала движения по тра-
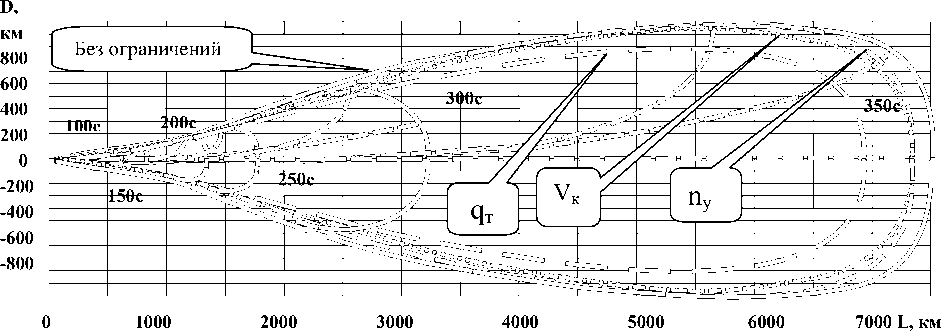
Рис. 6. Области возможного попадания ОС на поверхность приведения для разных моментов разделения ОС и ВТБ
ектории возвращения. Для момента начала движения по траектории возвращения, соответствующего 350-ой секунде, показаны области возможного попадания, рассчитанные с учетом ограничений на режимы движения в атмосфере и терминальные условия. Для области возможного попадания без ограничений штриховой линией показаны траектории спуска для точек, соответствующих максимальной продольной дальности спуска, максимальной боковой дальности спуска и максимальной боковой при фиксированной продольной дальности спуска.
Обсуждение результатов
Существование областей достижимости с учетом ограничений на режимы движения в атмосфере и терминальные условия на высоте начала участка предпосадочного маневрирования свидетельствует о принципиальной возможности приведения ОС в любую точку поверхности внутри области достижимости и выполнения предпосадочных маневров.
Начиная примерно с 100-й секунды движения по траектории выведения ОС с ВТБ в случае нештатной ситуации и экстренного отделения ВТБ от ОС возможно возвращение ОС в некоторую область на сфере приведения, т.е. появляется возможность маневрирования при спуске в атмосфере, целью которого может быть приведение ОС к началу участка предпосадочного маневрирования или в область параметров движения, в которой возможно срабатывание специальных средств спасения экипажа.
Области возможного попадания характеризуют маневренные возможности ОС при возникновении рассматриваемых нештатных ситуаций для всего участка траектории выведения ОС с ВТБ.
Результаты математического моделирования свидетельствуют о значительных маневренных возможностях ОС при спуске в атмосфере в нештатных ситуациях, связанных с прекращением его выведения на орбиту спутника Земли. Эти возможности могут быть реализованы при двухканальном управлении ОС с учетом ограничений на режимы движения в атмосфере, терминальные условия и управляющие зависимости.
