Исследование математической модели управления автоматизированным индивидуальным тепловым пунктом с типовыми регуляторами

Автор: Потапенко Евгений Анатольевич, Солдатенков Алексей Сергеевич, Потапенко Анатолий Николаевич, Глаголев Сергей Николаевич
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Проблемы энергетического машиностроения
Статья в выпуске: 1-2 т.14, 2012 года.
Бесплатный доступ
Показаны возможности математического моделирования управления автоматизированным индивидуальным тепловым пунктом (ИТП) здания с известными типовыми регуляторами. Исследованы законы регулирования 2-х типов: пропорционально-интегральный и интегральный, формируемые блоком регулирования контроллера с учётом применения исполнительного механизма. Показаны возможности использования И-регулятора для процесса отопления в автоматизированном ИТП здания.
Индивидуальный тепловой пункт, автоматическое регулирование, математическое моделирование
Короткий адрес: https://sciup.org/148200675
IDR: 148200675 | УДК: 681.51:664.1(04)
Research the mathematical model of automated individual thermal point management with standard controllers
Possibilities of mathematical modeling of automated individual thermal point management (ITP) of a building with known standard controllers are shown. Laws of regulation of two types are investigated: proportional and integral and integral, regulations of the controller formed by the block taking into account application of operating mechanism. Possibilities of using the I-controller for heating process in automated ITP of a building are shown.
Текст научной статьи Исследование математической модели управления автоматизированным индивидуальным тепловым пунктом с типовыми регуляторами
автоматизированных ИТП и элеваторных узлов может наблюдаться отрицательный эффект, т.е. отсутствовать экономия тепловой энергии. Этот факт экспериментально был зафиксирован в [7]. В [8] на базе разработанной модели [6] были исследованы с помощью математического моделирования особенности управления автоматизированным ИТП с применением различных типов исполнительных механизмов (ИМ), входящих в состав регулятора системы автоматизации объекта управления (ОУ). При этом было показано, например, что при одних и тех же параметрах контроллера, но с увеличением быстродействия ИМ на базе применения AME 30 (Danfoss) в сравнении с AME 20, возникает режим частого переключения электродвигателя ИМ. В целом это недопустимо, так как приводит к преждевременному выходу из строя электродвигателя ИМ, поэтому это явление должно исключаться путем коррекции параметров контроллера.
Постановка задачи. Исследуются с помощью математического моделирования особенности управления автоматизированным ИТП с известными типовыми регуляторами. За основу математического моделирования исследуемых процессов принят подход [6, 8].
Особенности схем моделирования. Структура типового автоматизированного ИТП для зависимой системы отопления, показанная на рис. 1, содержит технологический контроллер ТК1, моноблок циркуляционных насосов Н1 и Н2 с электроприводами М1 и М2, регулирующий клапан К1 с исполнительным механизмом ИМ1, обратный клапан КО1, регулятор перепада давления прямого действия РД1 с клапаном К2, датчик температуры наружного воздуха ДТ1, датчики температуры теплоносителя ДТ2 и ДТ3, датчики давления ДД1 и ДД2, а также узел учета тепловой энергии, например, теплосчетчик с комплектом датчиков температуры, расхода и давления.
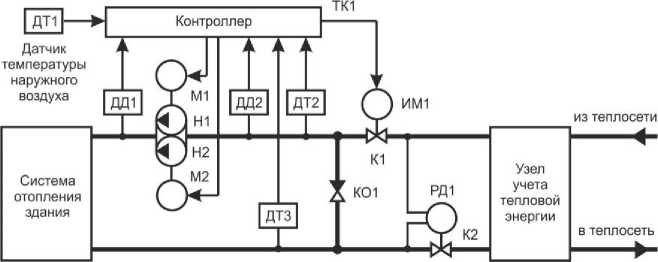
Рис. 1. Блок-схема автоматизированного ИТП здания
Обобщенная функциональная схема системы отопления автоматизированного ИТП здания показана на рис. 2. Состав элементов схемы следующий: блок регулятора по возмущению Р1 (погодная компенсация); двухконтурный блок регулятора Р2 по отклонению технологической величины; П1 – П3 элементы-преобразователи выходных величин датчиков температуры Д1 – Д3 в измеряемые ими физические величины; исполнительный механизм ИМ; регулирующий орган РО в виде седельного клапана; узел смешивания теплоносителей УС (см. рис. 1) от присоединяемых тепловых сетей и от обратного трубопровода системы отопления здания через перемычку с обратным клапаном; объект управления ОУ, представляющий собой СО здания.
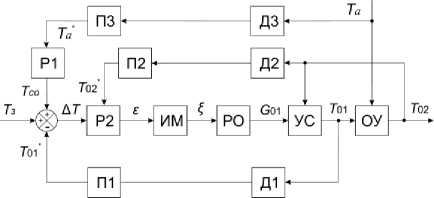
Рис. 2. Функциональная схема автоматизированного ИТП здания
Обозначения основных величин функциональной схемы следующие: Та – исходная температура наружного воздуха; Та* – температура наружного воздуха на входе в блок Р1; Тсо – требуемая в соответствии с принципом погодной компенсации расчетная температура теплоносителя в подающем трубопроводе СО здания после перемычки с обратным клапаном (см. рис. 1); Тз – расчетное отклонение температуры теплоносителя в подающем трубопроводе СО здания, заданное диспетчером с целью коррекции Тсо; ΔТ – отклонение по температуре регулируемой величины T01; ε – приведенный управляющий сигнал регулятора Р2; ξ – приведенная величина перемещения РО; G01 – расход теплоносителя после РО, т.е. перед перемычкой с обратным клапаном; Т01 – температура теплоносителя в подающем трубопроводе внутреннего контура СО здания; Т01 – измеренная температура теплоносителя в СО здания; Т02 – температура теплоносителя в обратном трубопроводе СО здания; Т02* – измеренная температура теплоносителя на входе в Р2.
Система уравнений математического моделирования. Математическая модель СО здания на основе автоматизированного ИТП в соответствии с функциональной схемой и с учётом структур регуляторов Р1 и Р2 (в целях упрощения схемы на рис. 2 их структуры не раскрыты) представлена в виде системы уравнений (1).
dT a *( t ) *
T da 7 + Ta (t) kdaTa (t), dt
*
t- 1 + T01* ( t) = kd 1T01( t), dt
T o ( t ) = f , ( T a ),
AT(t) = Tc0 (t) + T3 (t) - Toi (t), x i(A T) =
0, - X - T ( t ) < X - , k i A T ( t ), |A T ( t )| > X - ,
8( t) - ^ [x 1(A T) Tu+^x^ATI, fk2f(t), - km < 8(t) < km ,
X-) ( t ) = 5 , ,
[ k m , 8 ( t )| > k m ,
-
-( ( t ) = k u x 2 ( t ),
-
-t T u
G 01 ( t ) = G 1 kkek 2 ^ ( t ) ,
T 1 G 01 (t) + T 02 (t)(G co - G 01 0^)) = G co T 01 (t) ,
T 1 T 2 d^T °2^ t ) + ( T 1 + T 2 ) dT 02^ t ) + T 02 ( t ) = kT 01 ( t ), dt dt
*
-
dT 02 ( t ) T *
Td 2 + T02 (t ) kd 2 T 02( t ), dt
Система (1) включает следующие уравнения: уравнения движения датчиков температуры Д3 и Д1; уравнения для регуляторов Р1 и Р2 (уравнение отопительного графика для вычисления расчетной температуры теплоносителя в подающем трубопроводе СО здания Т со ; уравнение связи для определения Δ Т ; нелинейное уравнение зоны нечувствительности регулятора; уравнение регулятора Р2 для управления в системах теплоснабжения, например, по аналогии со специализированными контроллерами типа ECL Comfort; нелинейное уравнение зоны ограничения);
уравнение исполнительного механизма (считается интегрирующим звеном); уравнение РО относительно выходной величины G 01; уравнение связи для УС; уравнение движения ОУ по каналу регулирования «температура теплоносителя Т 02 -температура теплоносителя Т 01 »; уравнение движения датчика температуры Д2.
Дополнительные обозначения в системе уравнений (1) следующие: τ di и k di – соответственно постоянная времени и коэффициент передачи i -го датчика температуры; G co – расход теплоносителя во внутреннем контуре СО здания, определяемый циркуляционным насосом (см. рис. 1); G 1 – номинальный расход теплоносителя на входе РО; Т 1 – температура теплоносителя в подающем трубопроводе на вводе в ИТП; x 1(Δ Т ) – выходная величина нелинейной зоны нечувствительности регулятора Р2; x 2 ( t ) – выходная величина нелинейной зоны ограничения (насыщения) в регуляторе Р2; k 1 и k 2 – коэффициенты пропорциональности соответственно нелинейных зон нечувствительности и ограничения регулятора Р2; Xd – зона нечувствительности регулятора Р2; X p – зона пропорциональности регулятора Р2; Т и – постоянная регулятора Р2.
Основные результаты расчётов. На основе математической модели СО здания (см. систему уравнений (1)) с помощью имитационного моделирования в среде Simulink исследуем законы регулирования 2-х типов: пропорционально-интегрального и интегрального, формируемые блоком регулирования Р2 контроллера с применением определённого типа исполнительного механизма. Уравнение для определения величины тепловой мощности W ( t ) в здании с учётом применения автоматизированного ИТП следующее:
W ( t ) = G 01( t)T*X(.t ) - G 02( t)Tto(tt ) . (2)
Параметры моделирования. Считаем, что в начальный момент времени t =0 выполняется переход автоматизированного ИТП здания в режим пониженного теплопотребления за счет уменьшения Tз на 5°C. В итоге температура теплоносителя T со также уменьшается на 5°C. Исходные параметры для имитационного моделирования в среде Simulink представлены в табл. 1.
Таблица 1. Исходные параметры для моделирования
|
Наименование параметра, его обозначение |
Величина, размерность |
|
коэффициент преобразования объекта управления, k |
0,807 |
|
постоянная времени объекта управления, τ 1 |
1337 с |
|
постоянная времени объекта управления, τ 2 |
759 с |
|
начальная температура теплоносителя в системе, T 2 |
48,2°C |
|
максимальный расход на вводе в ИТП, G 1 |
14,7 м 3 /ч |
|
максимальный расход в СО здания, G со |
16 м 3 /ч |
|
температура наружного воздуха, T a |
-1,0°C |
|
начальное положение штока клапана ИМ |
74,6% |
|
параметр регулятора Р2, k m |
100% |
|
параметр регулятора Р2, X d |
0°C |
Учитывая, что исследуются контроллеры типа ECL Comfort (Danfoss), поэтому и остальные элементы автоматизации объекта управления (ОУ) принимаем этой же фирмы. Основные характеристики датчиков времени представлены в табл. 2.
Таблица 2. Постоянные времени датчиков температуры
|
Тип датчика |
Назначение и условное обозначение |
Величина, размерность |
|
ESMU-100 |
Погружной медный датчик температуры теплоносителя в гильзе, τd 1 |
32 с |
|
ESMT |
Датчик температуры наружного воздуха, τ da |
900 с |
Основные характеристики регулирующего клапана РО типа VB2 фирмы Danfoss, представлены в табл. 3.
Таблица 3. Характеристики регулирующего клапана типа VB2
|
Наименование параметра, его обозначение |
Величина, размерность |
|
диаметр, D у |
40 мм |
|
коэффициент, k kvs |
25 м3/ч |
|
условное давление, Ру |
2,5 МПа |
|
температура, Т min |
5 °C |
|
температура, Т max |
150 °C |
|
ход штока, h |
10 мм |
Технические характеристики исполнительного механизма типа AME 20 фирмы Danfoss для работы с регулирующим клапаном VB2 представлены в табл. 4.
Таблица 4. Характеристики исполнительного механизма AME 20
|
Наименование параметра |
Величина, размерность |
|
напряжение |
24 В |
|
частота |
50/60 Гц |
|
потребляемая мощность |
4 Вт |
|
тип управляющего сигнала |
аналоговый |
|
развиваемое усилие |
450 Н |
|
ход штока |
10 мм |
|
время перемещения штока на 1 мм |
15 с/мм |
|
входной сигнал 1 |
0 – 10 В; R i = 24 кОм |
|
входной сигнал 2 |
0–20 мА; R i =500 кОм |
|
выходной сигнал |
0(2) – 10 В |
|
наличие возвратной пружины |
нет |
|
минимальная температура окружающей среды |
0 °C |
|
максимальная температура окружающей среды |
55 °C |
Результаты моделирования. Регулятор автоматизированной системы для ОУ [9] включает контроллер с блоком регулирования Р2 и исполнительный механизм ИМ (см. рис. 2), их уравнения движения представлены в системе уравнений (1). В отличие от [8] в этой работе на основе применения ИМ типа AME 20 (см. табл. 2) изменяются параметры блока регулирования контроллера и вид закона, который он формирует с учётом исследуемого типа регулятора. Длительность моделирования при исследованиях во всех случаях 1 час 45 мин.
Вариант 1. Исследуется пропорциональноинтегральный закон регулирования (ПИ-регулятор), формируемый блоком регулирования Р2 контроллера с применением ИМ типа AME 20. Уравнение движения блока регулирования Р2, имеет вид (см. систему уравнений (1)):
^ ( t ) = km- x , ( A TT + p -
dx. ( A T ) dt
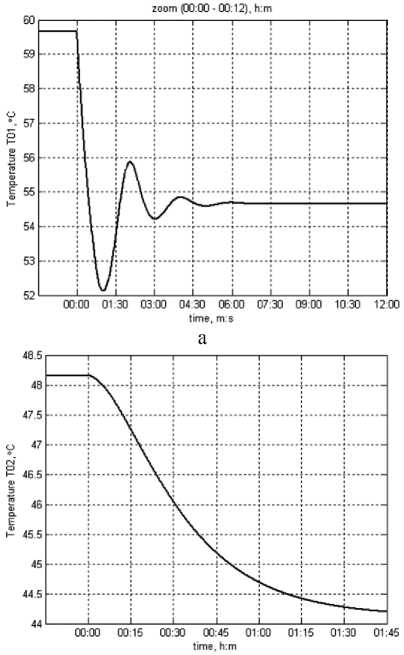
где X p 80°C, T u =10 с. Исходное уравнение (3) в ПИ-регуляторе затем интегрируется ИМ. Это важная особенность рассматриваемого контроллера. Результаты имитационного моделирования с учётом данных X p , и T u по этому варианту исследований показаны на рис. 3.
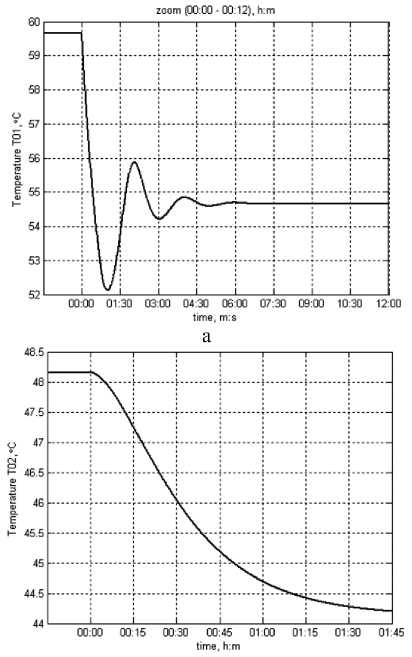
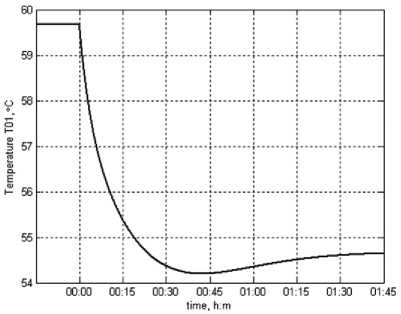
Анализ исследуемых динамических характеристик в виде изменений температуры теплоносителя T 01 на вводе в СО здания в увеличенном масштабе времени (см. рис. 3а) и температуры теплоносителя T 02 в обратном трубопроводе на выходе из СО здания (см. рис. 3б) показывает, что они имеют вид апериодических переходных процессов. В этом случае расчетное теплопо-требление здания составляет величину порядка 1,08502 ГДж. Увеличим в уравнении (2) время, т.е. принимаем его как Tu =60 с. Результаты имитационного моделирования показаны на рис. 4.
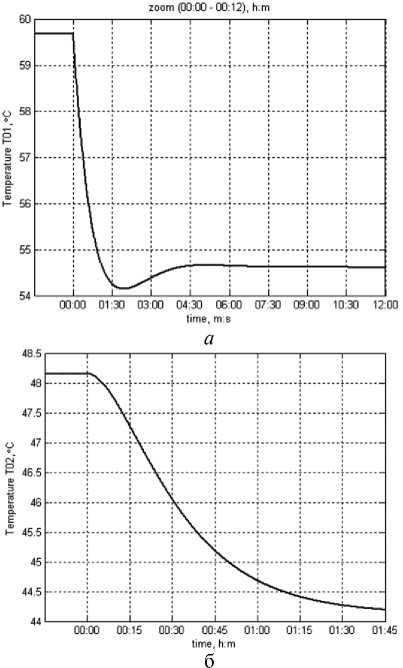
Рис. 3. Зависимости изменений T 01 на вводе в СО здания ( а ) и T 02 в обратном трубопроводе на выходе из СО здания ( б )
б
Рис. 4. Зависимости изменений T 01 ( а ) и T 02 ( б ) СО здания
Анализ исследуемых динамических характеристик в виде изменений T 01 на вводе в СО здания в увеличенном масштабе времени (см. рис. 4а) и температуры теплоносителя T 02 в обратном трубопроводе на выходе из СО здания (см. рис. 4б) показывает, что наблюдается для T 01 переходный процесс колебательного вида. Расчетное теплопотребление порядка 1,08858 ГДж.
Вариант 2. Исследуется интегральный закон регулирования (И-регулятор), формируемый блоком регулирования Р2 контроллера с применением аналогичного ИМ. В связи с этим уравнение движения блока регулирования Р2 заменяется в системе уравнений (1) на уравнение вида:
=( t) = km- [*1(A T )T ], (4)
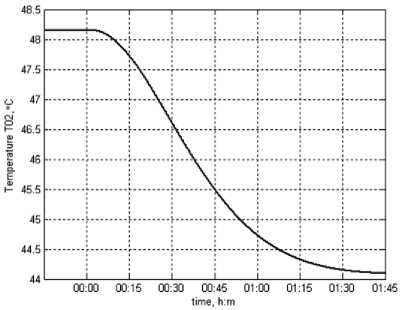
X где Xp=80°C, Tu=60 с. Исходное уравнение (4) в И-регуляторе затем интегрируется ИМ. Результаты имитационного моделирования для этого варианта показаны на рис. 5.
б
Рис. 5. Зависимости изменений T 01 ( а ) и T 02 ( б ) СО здания
Анализ исследуемых динамических характеристик в виде изменений температуры теплоносителя T01 на вводе в СО здания в увеличенном масштабе времени (см. рис. 5а) и температуры теплоносителя T02 в обратном трубопроводе на выходе из СО здания (см. рис. 5б) показывает, что наблюдается для T01 переходный процесс колебательного вида. Расчетное теплопотребление здания в исследуемом случае порядка 1,08535 ГДж.
В уравнении (3) принимаем следующие значения параметров: X p =100°C, T u =1 с. При проведении всех исследований выбирались значения T u =const с учётом того, что T u больше или меньше времени перемещения штока клапана с помощью ИМ (см. табл. 4). Результаты имитационного моделирования с учётом выбранных значений X p и T u показаны на рис. 6.
а
б
Рис. 6. Зависимости изменений T 01 ( а ) и T 02 ( б ) СО здания
Анализ исследуемых динамических характеристик в виде изменений T 01 на вводе в СО здания в увеличенном масштабе времени (см. рис. 6а) и температуры теплоносителя T 02 в обратном трубопроводе на выходе из СО здания (см. рис. 6б) показывает, что они имеют вид апериодических переходных процессов. Как и следовало ожидать, расчетное теплопотребление здания уменьшилось до величины 1,08456 ГДж.
Сравнительный анализ полученных результатов для исследуемых 2-х законов регулирования, формируемых блоком регулирования Р2 контроллера с применения ИМ типа AME 20 при различных параметрах блока контроллера, показал следующее:
-
1) для ПИ-регулятора расчетное теплопотребле-ние здания незначительно увеличивается с 1,08502 ГДж до 1,08858 ГДж при возникновении колебательного переходного процесса;
-
2) для И-регулятора расчетное теплопотребление здания находится на уровне аналогичном как для ПИ-регулятора и незначительно увеличивается
при колебательном переходном процессе с 1,08456 ГДж до 1,08535 ГДж.
Переходные процессы колебательного вида для ИМ должны быть исключены, так как они приводят к преждевременному выходу из строя электродвигателя ИМ. Для устранения колебательных процессов, появившихся в автоматической системе регулирования автоматизированного ИТП при исследуемых процессах, необходимо изменить настроечные параметры регулятора с учётом заданного времени перемещения штока с помощью ИМ.
Выводы:
-
1. Представлены возможности математического моделирования управления автоматизированным ИТП здания с известными типовыми регуляторами. С помощью имитационного моделирования в среде Simulink исследованы и выявлены особенности автоматизированного ИТП на базе применения ПИ- и И-регуляторов.
-
2. В инновационных технологиях, внедряемых при создании автоматизированных ИТП зданий, необходимо учитывать полученные результаты, которые показали, что теплопотребле-ние здания при типовых законах регулирования находится приблизительно на одном и том же уровне и поэтому для регулирования процесса отопления здания имеется возможность практического применения И-регулятора, так как он проще в реализации и в настройке.
-
3. Анализ переходного процесса с учётом температуры теплоносителя T 02 в обратном трубопроводе здания показывает, что ОУ является низкочастотным фильтром по отношению к существенным колебаниям на его вводе (в подающем трубопроводе).
-
4. В отличие от известных методик определения параметров блока регулирования контроллера на основе расчётной переходной характеристики последовательного соединения ОУ и датчика температуры с помощью разработанной математической модели имеется возможность
определять не только оптимальные параметры настройки блока регулирования, но прежде всего параметры теплоносителя при возможных изменениях как в структуре элементов автоматизированного ИТП, так и в СО здания или сооружения.
Список литературы Исследование математической модели управления автоматизированным индивидуальным тепловым пунктом с типовыми регуляторами
- Hartman, T. Индустрия комфорта: возможности XXI века/T Hartman//Вентиляция, отопление, кондиционирование воздуха, теплоснабжение и строительная теплофизика. 2001. №3. С. 16-20.
- Табунщиков, Ю.А. Энергоэффективные здания/Ю.А. Табунщиков, М.М. Бродач, Н.В. Шилкин. -М.: АВОК-ПРЕСС, 2003. -200 с.
- Ицкович, Э.Л. Классификация современных контроллеров и их сетевых комплексов//Оборудование. 2004. № 7. С. 36-41.
- Электронные регуляторы и электрические средства управления. Каталог RC.08.Е3.50 -М.: ООО «Данфосс», 2009. 115 с.
- Оборудование для автоматизации. Каталог продукции 2010 -М.: ООО «ОВЕН», 2010. 384 с.
- Потапенко, А.Н. Математическое моделирование процессов отопления распределенного комплекса зданий при различных схемах теплопотребления/А.Н. Потапенко, А.С. Солдатенков, Е.А. Потапенко//Известия Самарского научного центра Российской академии наук. 2011. Т13, №4(4). С. 998-1002.
- Потапенко, А.Н. Автоматизированное управление процессом централизованного теплоснабжения распределенного комплекса зданий с учетом моделирования этих процессов/А.Н. Потапенко, Е.А. Потапенко, А.С. Солдатенков, А.О. Яковлев//Известия высших учебных заведений. Проблемы энергетики. 2007. № 7-8. С. 120-134.
- Солдатенков, А.С. Разработка и исследование математической модели управления автоматизированным индивидуальным тепловым пунктом/А.С. Солдатенков, А.Н. Потапенко, С.Н. Глаголев//Научно-технические ведомости СПбГПУ. 2012. №1. С. 41-48.
- Клюев, А.С. Наладка средств автоматизации и автоматических систем регулирования: справочное пособие/А.С. Клюев и др.; 2-е изд., перераб. и доп. -М.: Энергоатомиздат, 1989. 368 с.
