Исследование модального способа построения Simulink-моделей ПИД-регуляторов для динамических систем первого порядка с транспортным запаздыванием

Автор: Баканов М.В., Данеев А.В., Сизых В.Н.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Информатика, вычислительная техника и управление
Статья в выпуске: 2 т.24, 2022 года.
Бесплатный доступ
В статье рассматривается методика проектирования модальных ПИД-регуляторов для редуцированных динамических систем первого порядка и динамических объектов первого порядка с транспортным запаздыванием. Разрабатывается Simulink-модель для исследования таких систем и объектов. Приводятся результаты исследования и тестирования разработанной модели в программной среде Matlab/Simulink.
Модальное управление, пид-регулятор, транспортное запаздывание
Короткий адрес: https://sciup.org/148324695
IDR: 148324695 | УДК: 681.5 | DOI: 10.37313/1990-5378-2022-24-2-90-96
Investigation of a model method for constructing Simulink models of PID controllers for first-order dynamic systems with transport delay
The article discusses the methodology of designing modal PID controllers for reduced first-order dynamic systems and first-order dynamic objects with transport delay. A Simulink model is being developed for the study of such systems and objects. The results of the research and testing of the developed model in the Matlab/Simulink software environment are presented.
Текст научной статьи Исследование модального способа построения Simulink-моделей ПИД-регуляторов для динамических систем первого порядка с транспортным запаздыванием
В работе [1] был разработан модальный метод проектирования ПИД-регуляторов для динамических систем второго и более высокого порядков. Суть модального способа ПИД-регулирования сводится к выбору параметров регулятора таким образом, чтобы его нули и полюса соответствовали полюсам аппроксимируемого полиномами первой или второй степени многомерного объекта. Доказано, что в этом случае обеспечивается наилучшее качество переходных процессов замкнутой регулятором системы.
В настоящей статье ставится задача описания и тестирования предложенного в [1] модального метода проектирования для аппроксимированных систем первого порядка и объектов первого порядка с запаздыванием.
1. МЕТОДИКА МОДЕЛИРОВАНИЯ ПИД-РЕГУЛЯТОРОВ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ ПЕРВОГО ПОРЯДКА И СИСТЕМ
С ЗАПАЗДЫВАНИЕМ
Системы первого порядка и системы, которые могут быть аппроксимированы уравнениями первого порядка, главным образом характеризуются постоянной времени Т передаточной функции (1)
W ( 5 ) =
Ts + 1
Коэффициенты ПИД-регулятора, определяемые по постоянным времени для различных систем первого порядка KP, KI, KD и постоянные времени согласно описанной в [1] методике предлагается определять по формулам:
KT KT
T = — = - = 1, td = — = - = 1,- = —
I KI T D KP T в которых дифференциальная составляющая KD и интегральная составляющая KI корректируются, как показали исследования [1], споправочными коэффициентами a=[0.1, 3] и б=[0.1, 2] соответственно (табл. 1), N-коэффициент коррекции постоянной времени фильтра высоких частот.
Большое число промышленных объектов (например, бортовая инерциальная навигационная система самолета [2]) может быть приближенно смоделировано системами первого порядка с запаздыванием (FOPTD-моделями [2]). FOPDT-модели являются комбинацией моделей
систем первого порядка со звеном постоянного
транспортного запаздывания. Их передаточная
функция задается формулой (2)
W ( 5 ) =
e
Ts + 1
Баканов Максим Витальевич, аспирант.
и представляется s-образной кривой на рис. 1. Она характеризуется двумя константами: временем задержки (постоянной транспортного запаздывания) L и постоянной времени Т объекта первого порядка.
Для расчета коэффициентов ПИД-регуляторов в этом случае предлагается использовать формулы, приведенные в табл. 2.
Для проверки предложенного метода проектирования ПИД-регуляторов, создадим
Таблица 1. Предлагаемые формулы для расчетов коэффициентов ПИД-регуляторов для систем первого порядка
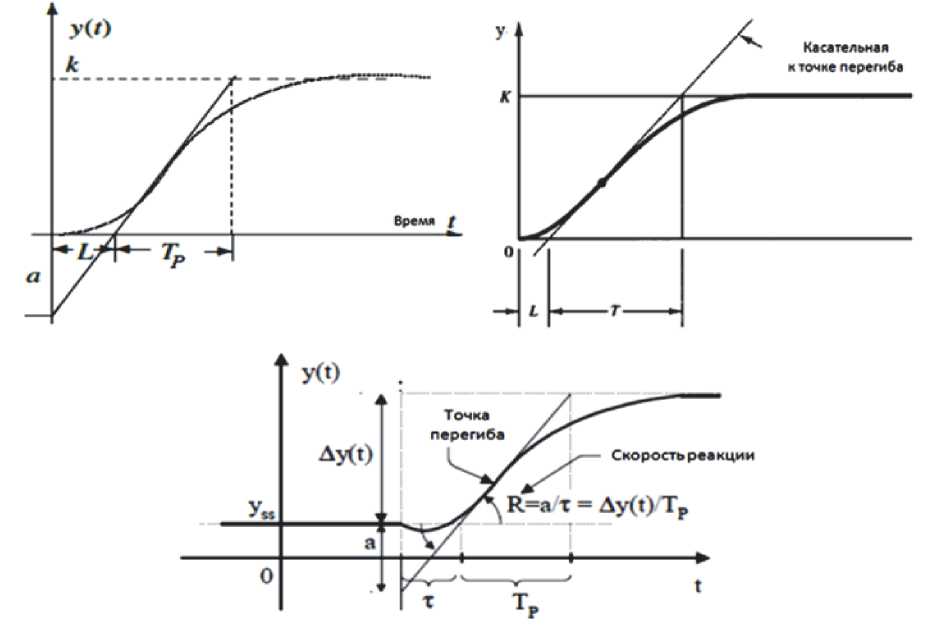
Рис. 1. S- образная крив ая реакции системы с запаздыванием
|
Объект |
Параметры ПИД-регулятора |
|||||
|
KP |
KI |
KD |
т D |
TI |
N |
|
|
T |
T |
а Т |
е Т |
1 |
1 |
2…20 |
|
Пределы ограничений |
T |
а Т а = 0.1...3 |
е Т е = 0.1...2 |
е е = 0.1...2 |
а а = 0.1...3 |
|
Таблица 2. Предлагаемые формулы для расчетов коэффициентов ПИД-регуляторов для систем первого порядка с запаздыванием
|
Объект |
Параметры ПИД-регулятора |
|||||
|
KP |
KI |
KD |
т TD |
TI |
N |
|
|
T |
T |
а Т |
е Т |
1 |
1 |
2…20 |
|
Пределы ограничений |
T |
а Т а = 0.1...3 |
е Т е = 0.1...2 |
е е = 0.1...2 |
а а = 0.1...3 |
|
Simulink-модель, изображенную на рис. 2, с четырьмя различными аппроксимированными системами, три из которых являются системами первого порядка, а четвертая – описывает процесс первого порядка с транспортным запаздыванием.
2. РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ В СРЕДЕ MATLAB/SIMULINK
При тестировании в среде Matlab предложенного метода проектирования ПИД-регуляторов [1] для систем первого порядка и объекта перво- го порядка с запаздыванием, необходимо применить формулы, приведенные в табл. 2, в виде функции, обозначаемой «PID_method». Значения законов ПИД-регулирования, вычисленные по предложенным формулам, а также величины коэффициентов настройкиKD и KI, ускоряющие реакцию системы и снижающие перерегулирование, приведены в табл.3.
При подстановке вычисленных коэффициентов ПИД в Simulink-модель для наблюдения реакции конкретной системы необходимо производить действия с переключателями ManualSwitch. При этом для каждой системы результаты реакции отображаются при помощи блока Scope в виде графиков, изображенных на рис. 3 и 4.
На рис. 3 изображена реакция системы 1 (sys1) при следующем положении переключателей:
ManualSwitch – вверх, ManualSwitch2 – вверх, а положение ManualSwitch1 произвольно; и значениях коэффициентов, вычисленных в табл. 3 в первом случае. Таким образом, наблюдается воздействие обычного ПИД-регулятора на систему 1 (sys1) по методу Николса - Циглера [1].
На рис. 4 изображена реакция системы 1 (sys1) при следующем положении переключателей: ManualSwitch – вниз, ManualSwitch1 – вверх, ManualSwitch2 – вверх; и значениях коэффициентов, вычисленных в таблице 3 в первом случае. Таким образом, наблюдается воздействие встроенного ПИД-контроллера Simulink на систему 1 (sys1).
На рис. 5 изображена реакция системы 1 (sys1) при следующем положении переключателей: ManualSwitch – вниз, ManualSwitch1 – вниз,
Таблица 3. Вычисленные значения коэффициентов ПИД-регуляторов
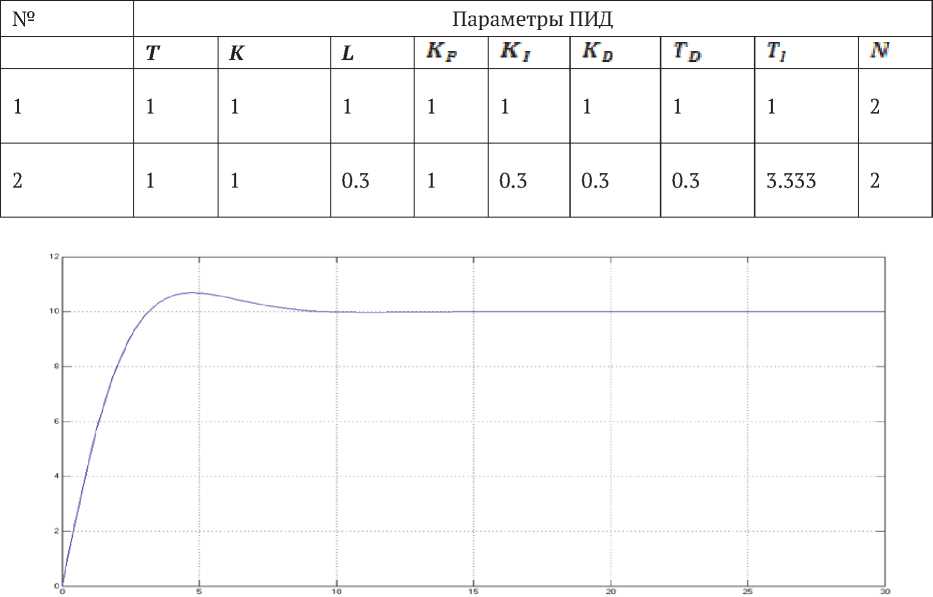
Рис. 3. воздействие обычного ПИД-регулятора на систему 1 (sys1)
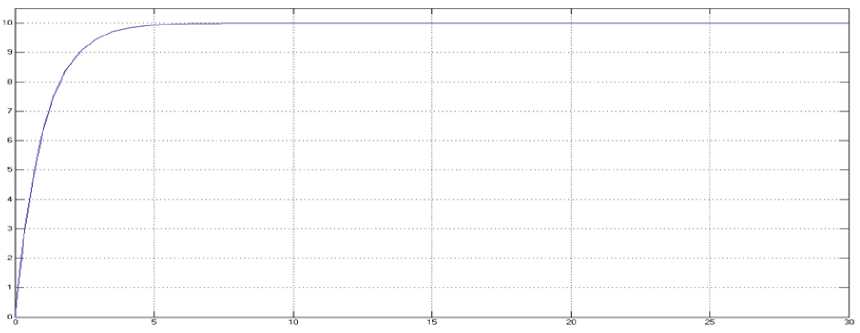
Рис. 4. воздействие встроенного ПИД-регулятора на систему 1 (sys1)
ManualSwitch2 – вверх; и значениях коэффициентов, вычисленных в таблице 3 в первом случае. Таким образом, наблюдается воздействие ПИД-регулятора, смоделированного с учетом фильтра низких частот, на систему 1 (sys1).
На рис. 6 изображена реакция системы 2 (sys2) при следующем положении переключателей: ManualSwitch – вверх, ManualSwitch2 – вверх, а положение остальных переключателей – произвольно; и значениях коэффициентов, вычисленных в табл. 3 во втором случае. Таким образом, наблюдается воздействие обычного ПИД-регулятора на систему 2 (sys2).
На рис. 7 изображена реакция системы 2 (sys2) при следующем положении переключателей: ManualSwitch – вверх, ManualSwitch2
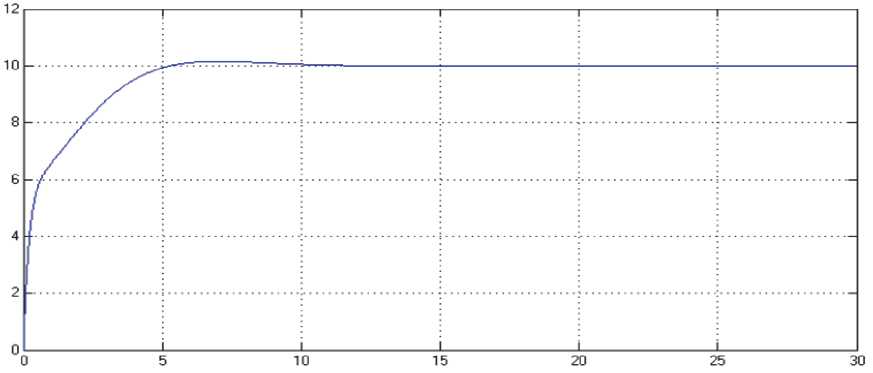
Рис. 5. воздействие регулятора, смоделированного с учетом фильтра низких частот ПИД-регулятора на систему 1 (sys1)
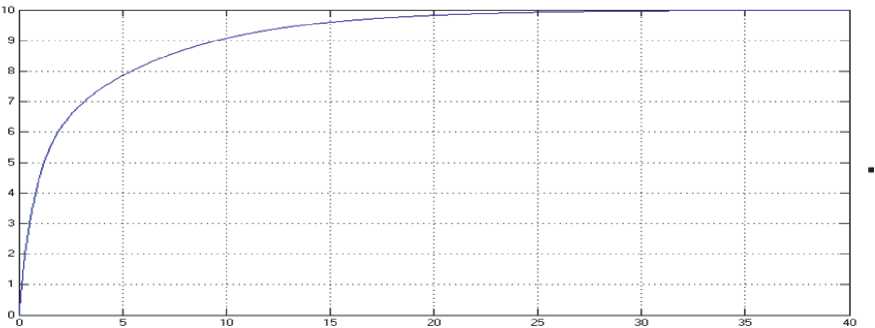
Рис. 6 . воздействие обычного ПИД-регулятора на систему 2 (sys2)
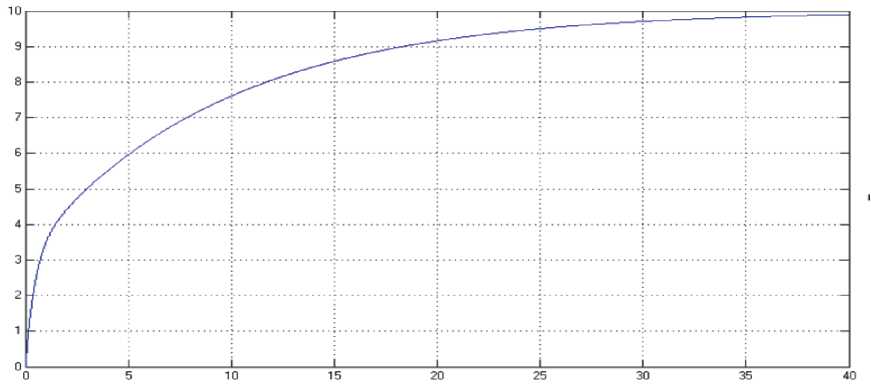
Рис. 7. Воздействие встроенного ПИД-регулятора на систему 2 (sys2)
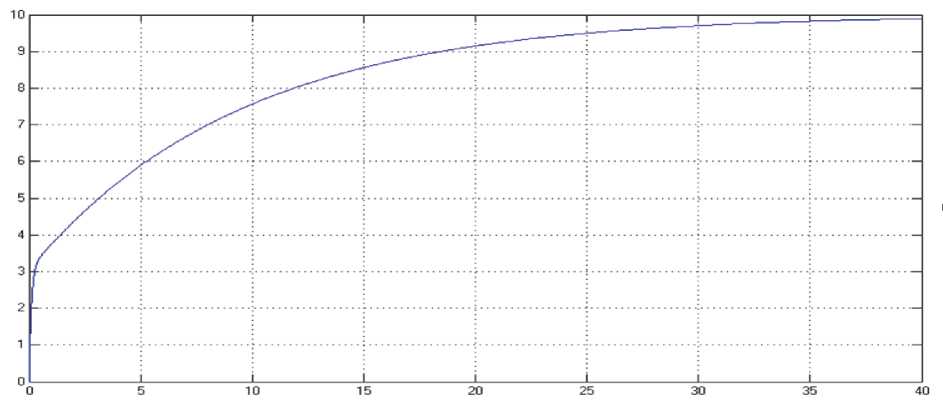
Рис. 8. Воздействие регулятора, смоделированного с учетом фильтра низких частот ПИД-регулятора на систему 2 (sys2)
– вниз, ManualSwitch3 – вверх, а положение остальных переключателей - произвольно; и значениях коэффициентов, вычисленных в табл. 3 во втором случае. Таким образом, наблюдается воздействие встроенного ПИД-регулятора на систему 2 (sys2).
На рис. 8 изображена реакция системы 2 (sys2) при следующем положении переключателей: ManualSwitch – вниз, ManualSwitch1 – вниз, ManualSwitch2 – вниз, ManualSwitch3 – вверх, а положение остальных переключателей - произвольно; и значениях коэффициентов, вычисленных в табл. 3 во втором случае. Таким образом, наблюдается воздействие ПИД-регулятора, смоделированного с учетом фильтра низких частот, на систему 2 (sys2).
ЗАКЛЮЧЕНИЕ
В статье представлены результаты исследований на основе простой и эффективной методики проектирования ПИД-регуляторов, основанной на знании параметров свободного движения объектов. Предложенная модель была протестирована на различных динамических системах, включая системы первого, второго, третьего и четвертого порядков, а также объектов первого порядка с запаздыванием. Приведены результаты численного моделирования: зависимости реакций систем на ступенчатый входной сигнал 10 . 1( t ) .
Анализ результатов тестирования показывает, что важным компромиссом моделирования является компромисс между средней быстротой сглаживания выходного сигнала и приемлемым перерегулированием. Это позволяет получить требуемые показатели качества переходных процессов: апериодичность выходного сигнала и минимальное время регулирования, а также определить величину критического транспорт- ного запаздывания, при котором объект управления становится неустойчивым.
Ряд близких и смежных вопросов управления объектами различной природы рассмотрен в работах [3-14].
Список литературы Исследование модального способа построения Simulink-моделей ПИД-регуляторов для динамических систем первого порядка с транспортным запаздыванием
- Сизых В.Н. Алгоритмы управления мобильным роботом по методу обратных задач динамики / В.Н. Сизых, М.В. Баканов // Инфраструктура и эксплуатация наземного транспорта. - Нижний Новгород, 2019. - С. 139-144.
- Булгаков, В.В. Сравнительный анализ формализованных методов синтеза регулятора следящей системы / В.В. Булгаков, В.С. Кулабухов // Приборы. - 2013. - № 1(151). - С. 39-44.
- Quevedo J., Escobet T. Digital control: past, present and future of PID control // Proc. IFACWorkshop. Terassa, Spain, Apr. 5-7, 2000.
- Антошкин, С.Б. Система управления авто-номно-го робота на основе метода обратных задач динамики / С.Б. Антошкин, М.В. Баканов, В.Н. Сизых // Современные технологии. Системный анализ. Моделирование. - 2019. - № 2 (62). - С. 15-23.
- Ким, Д.П. Алгебраический метод синтеза линейных непрерывных систем управления / Д.П. Ким // Мехатроника, автоматизация, управление. -2011. - № 1. - С. 9-15.
- Ziegler J.G., Nichols N.B. Optimum setting for automatic controllers // Trans. ASME. - 1942. -№ 64. - С. 759-768.
- Farhan A.S. New efficient model-based PID design method // European Scientific Journal Edition. 2013. № 9(15). С. 181-190.
- Сизых, В.Н. Ассоциативный автомат адаптивного управления технологическими процессами на основе нейронных сетей / В.Н. Сизых, А.Ю. Му-хопад // Научный вестник Новосибирского государственного технического университета. - 2014. - № 1(54). - С. 34-45.
- Сизых, В.Н. Алгоритмы управления мобильным роботом на основе метода обратных задач динамики / В.Н. Сизых, М.В. Баканов, И.И. Белобров, Е.Ю. Беляев // Транспортная инфраструктура Сибирского региона. - 2019. - № 1. - С. 284-288.
- Сизых, В.Н. Модальное управление мобильным роботом при дифференциальном отклонении колесной пары / В.Н. Сизых, М.В. Баканов // Информационные технологии и математическое моделирование в управлении сложными системами. - 2019. - № 1 (2). - С. 62-71.
- Сизых, В.Н. Математическая модель для адаптивного управления трёхколёсным мобильным роботом / В.Н. Сизых, М.В. Баканов // Транспортное, горное и строительное машиностроение: наука и производство. - Материалы I международной научно-практической конференции. - 2018. - С. 9-18.
- Данеев А.В. К апостериорному моделированию нестационарных гиперболических систем / А.В. Данеев, В.А. Русанов, М.В. Русанов, В.Н. Сизых // Известия Самарского научного центра Российской академии наук. 2018. - Т. 20. - № 1 (81). - С. 106-113.
- Sizykh V.N.,Daneev A.V.,DambaevJ.G. Methodology of approximately optimal synthesis of fuzzy controllers for circuit of improvement and localization // Far East Journal of Mathematical Sciences. 2017. Т. 101. № 3. С. 487-506.
- Агеев, А.М. Синтез оптимальных регуляторов системы управления самолетом через решение обратной задачи АКОР / А.М. Агеев, В.Н. Сизых // Научный вестник Новосибирского государственного технического университета. - 2014. - № 3 (56). - С. 7-22.
