Исследование нестационарных движений физических систем

Автор: Бойкова Л.В., Бойкова Т.А.
Журнал: Известия Самарского научного центра Российской академии наук @izvestiya-ssc
Рубрика: Физика и электроника
Статья в выпуске: 3-2 т.11, 2009 года.
Бесплатный доступ
В работе ставится задача исследования динамики теоретически существующих систем широкого класса. Любая система характеризуется передаточной функцией, которая определяется структурной и параметрами системы. В общем случае рассматриваемые системы могут быть многомерными, то есть иметь n входов и m выходов. Поставим задачу определения входного управляющего воздействия, состоящую в том, чтобы указать такие функции, при которых любое движение системы, начинающееся в окрестности ее рабочего пространства, за ограниченное время попадает в зону этого пространства, и остается там в дальнейшем. В классической формулировке - это задача о стабилизации программного движения системы.
Динамика, передаточная функция, управляющее воздействие, стабилизация программного движения системы
Короткий адрес: https://sciup.org/148198636
IDR: 148198636 | УДК: 65.011.08
Research of non-stationary movements of physical systems
In work the research problem of dynamics of theoretically existing systems of a wide class is put. Any system is characterized by transfer function which is defined structural and parameters of system. Generally considered systems can be multivariate, that is have n inputs and m outputs. Lets set the task of definition of the entrance operating influence, consisting specifying such functions Qy at which any movement of system beginning in a vicinity of its working space, for limited time gets in a zone of this space, and remains there in the further. In the classical formulation is a problem about stabilization of program movement of system.
Текст научной статьи Исследование нестационарных движений физических систем
Рассмотрим нестационарную голономную систему с идеальными связями, положение которой определяется n обобщенными координатами Q . Математическую модель такой системы можно представить уравнениями Лагранжа d ЭТ дТ _ dt 9 q dq ' (1)
где кинетическая энергия
7 = Г2 + 7\ + To , T2(t,q, q) =^qT(t,q)q
Tjfcg, q)= BT(t, q)q, ^(t, V) = ), (3)
где A(t, q) – матрица размерности n H n, B(t,q) – матрица-столбец размерности n H 1, C(t, q) – скалярная функция, Q = Q(t,q,q) – матрица-столбец размерности nЧ1 обобщенных сил, действующих на систему.
При этом предполагаем, что функции переменных C^ Q ) являются дважды непрерывнодифференцируемы и ограничены вместе со своими производными физическими свойствами исследуемого объекта.
Вектор обобщенных сил Q можно представить в виде суммы
Q^,q>4)=Qy(t,q,q) + Qb(t,q), (4) где Qy = – n-вектор управляющих сил, который необходимо определить, а Qb= (^.» Q) – n-вектор внешних сил.
Учитывая выражение кинетической энергии (2), уравнения (1) можно привести к виду
d dT2 dT2 dt dq dq
dt dq ^ Q) Qb , (5)
Если ввести новые обобщенные координаты x = q- q(t), то структура уравнений (3) в силу линейности оператора предложенной замены не изменится. При этом в новых переменных кине- тическая энергия системы имеет вид
T= =
=
+ BT(t,x + q(t))(x + q(t)) +
+C(t,xr + q(t)) =
, где
A(t,x) = A(t,x + q(t)) ,
B(t,x) = B(t,x + q(t)) + A(t,x + q(ty)q(t),
C(t,x) =^qT(t)A(t,x + q(t))Q(C +

В результате указанной замены изучение поведения решений системы (1) в окрестности программного движения ( q.q) сводится к изучению поведения решений преобразованной системы в окрестности x = x = 0 . Поэтому, без ограничения общности, можно считать, что обобщенные координаты Q выбраны таким образом, что программное движение системы определяется тождеством q — 0, q =0.
Будем искать вектор управляющих сил Qy(t, q. q) в виде
=
= . (6)
Для существования программного движения вектор сил Qy(t,q) должен удовлетворять соотношению
Q^t, o) = -Qb (t, o) - ^ (t, o) + ^(t, o) . (7)
Если при этом

, при всехtER , тогда следует, что
<^М = 0 .
Допустим, что действие управляющих и внешних сил представимо в виде
Qy(t,q) + Qb^q^-^^t-q) +
Эс ^ л _ ^ ^ 9S(t,q}
+ -(t,q) = -p(t,q) — ,
где функции p(t,q"),dS(t,q) удовлетворяют условиям
0 < p0< p(t, q) < pt , где Po , Pi – постоянные,
S(t,qQ) = 0,^| (t,q0) = 0
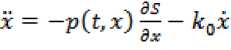
Тогда уравнение движения (5) принимает вид d ^ат„\ ат, as , =-P^+G 4 + Qy. (9) at \ cq J dq dq v 7
Решение уравнения (9) позволяет получить зависимость оптимальных входных сигналов от параметров системы с целью получения необходимого сигнала на выходе.
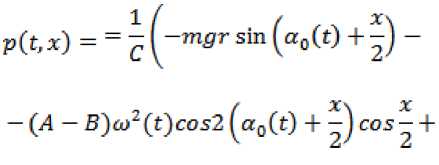
Рассмотрим задачу о стабилизации некоторого нестационарного движения физического маятника fl = y0(t) , которое создается регулируемой скоростью вращения вокруг вертикальной оси. Уравнение движения маятника имеет вид
АУ = — (mgz0
+ (C — S)
Пусть закон вращения щ = щ(t) вокруг вертикальной оси таков, что осуществляется нестационарное движение маятникаУ = y0(t), то есть w2(t)(C — 5) cosi90(t) sini90(t) =
= ЛУ0(1) + mgz0 sin Уо (t) , при этом будем предполагать, что ω (t) представляет собой ограниченную функцию.
Введем x = У — Уо (t) – отклонение истинного движения от программного. Допустим, что в оси качания действует стабилизирующий момент, типа момента вязкого трения, My = —kx , где к = const > 0 .
Из (10) находим, что уравнения возмущенного движения будут иметь вид
,
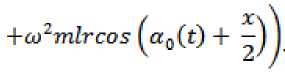
где где ,

+ (C — S)to2(t) cos2^i90(t) +j) cos^
При выполнении условий
p(t, 0) > Pq = const > 0 ,
— (Znp(t,0)) > — 2k0 + a0
(a0 = const > 0) , или p(t, 0) = mgzQ cos Уо (t) +
+ (C — 5)
То есть при выполнении условий (12) имеем равномерную асимптотическую устойчивость положения x = 0 системы (11) или равномерную асимптотическую устойчивость заданного нестационарного движенияУ = ^(t) системы (10). Из этой равномерно асимптотической устойчивости следует также равномерная устойчивость при любых постоянно действующих возмущениях.
В общем случае, условия (12) можно представить как условие определенно-положи-тельности второй вариации 5 на движении » = ^(t) и условие ограниченности логарифмического изменения этой вариации во времени снизу значением 2к0.
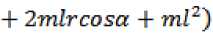
Исследуем устойчивость нестационарных движений центрифуги, изображенной на чертеже (рис. 1). Кабина M центрифуги представляет собой твердое тело, которое может свободно поворачиваться вокруг оси OO' относительно державки AOO'. Ось OO' ортогональна плоскости L, проходящей через ось AD центрифуги и центр масс S кабины. Державка AOO' приводится во вращение вокруг неподвижной оси AD, при этом скорость вращения изменяется согласно заданному закону ω = ω (t) . За обобщенную координату примем угол α – угол поворота кабины вокруг оси OO'.
Пусть L – плоскость симметрии кабины, а ось Ox , проходящая в этой плоскости через точку S и пересекающаяся с осью OO' в точке O, является главной осью центрального эллипсоида инерции. Обозначим через A, B, C моменты инерции кабины M относительно осей Ox, Oy, Oz , рассто-
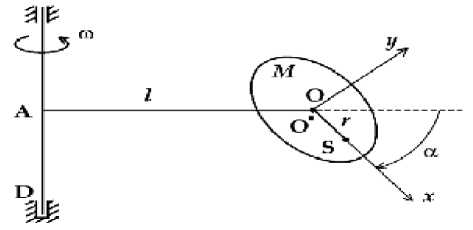
Рис. 1. Устойчивость нестационарных движений центрифуги
При выполнении условий
p(t, 0) > p0 = const > 0,
яние OA через l , расстояние OS через r . Кинетическая энергия кабины имеет вид

или
Т = Т Т Т 1 1 ,
Т2 = ^Са2 К = О
' 2 , 1 ,
Tq = -о>2(£)(Л sin2 а + Bcos2a +
+ "Zmlrcosa + ml2) .
Потенциальная энергия кабины в поле тяжести имеет вид силы
П = mgr sin a.
Предположим также, что в шарнирных опорах OOґ действуют силы вязкого трения, образующие момент M = — к a , где к = const > О . Запишем уравнения движения
Ca = —mgr
cos
a
+
H((Л — B) cos a — mlr^ sin a — ka . (13)
Пусть регулируемое вращение державки AOOґ вокруг оси AD по закону щ = щ(t) таково, что осуществляется нестационарное движение кабины a = a0(t), то есть имеет место соотношение co2 (t)((Л — B) cos cr0 — mlrj sin a0(t) =
.
При этом будем предполагать, что ω (t) представляет собой ограниченную функцию.
Рассмотрим задачу об условиях устойчивос- ти указанного нестационарного движения a = a0(t) . Уравнение возмущенного движения можно привести к виду x = — pvt.x) - k^, (14)
гдеx = a — a0(t) – отклонение истинного движения от программного, ки = - 5(л) = 4(1 — cos-)
1 c, X 2 ,
— (lnp(t, 0)) > —2кг + a2, где a2 = const > 0
или
—mgr sin a0(t) + co2(t)(?nZr cos a0 (t) —
— (Л — B)cos2a0(t)) > pQ > 0
2k 2cu(t)w(t)((4 - 8)cos2a0(t) - mZrcosa0(t)) +
C 1 TngrsiTUZQ^t) 4 ,
+fmyrcosa:D (t)+a)2(t)(mirsina:0 (t)-2(A-B) sin2a0 (t))Ja0(t) +ш2(0((Д-В) cos2aB (,t)—mlrcosaB(.i))
где a± = const > 0 .
То есть имеем равномерную асимптотическую устойчивость положения x = 0 системы (14) или равномерную асимптотическую устой- чивость заданного нестационарного движения a = a0(t) системы (13). Из этой равномерной асимптотической устойчивости следует также равномерная устойчивость при любых постоянно действующих возмущениях.
При отсутствии сил вязкого трения в опорах OO', т.е. когда M=0 , и при противоположном условии p(t, 0) < -p0< 0, движение a = a0(t) будет неустойчивым.
Рассмотрим задачу в предположении, что ось OO' параллельна оси AD центрифуги (рис. 2).
За обобщенную координату примем угол Я – угол поворота кабины вокруг оси OO'. Обозначим момент инерции кабины относительно оси OO' через I, расстояние OA через l, расстояние OS через r.
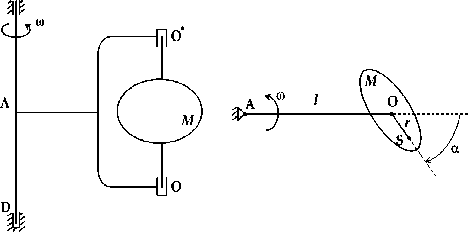
Рис. 2. К решению задачи в предположении, что ось OOґ параллельна оси AD центрифуги
Потенциальная энергия в рассматриваемом случае равна нулю. Кинетическая энергия имеет вид
Т = |z«2 ~ a>(t)(mZrto(t) cos а + /)а +
+ -co2(t)(Z + mZ2 + 2mZr cos a )
2 , или
Г = T2 + Tt + To
,
,r2 = |/<^
Тг =
—
Предположим также, что в шарнирных опо-
рах OO' действуют силы вязкого трения, образующие момент M = —Zea, где к = const > 0 . Запишем уравнения движения la = —to2 (t)mZr sin a +
+ to(t)(2mZrco(t) cos a + 7) — ka . (15)
Пусть регулируемое вращение державки AOO' вокруг оси AD по закону
co
=
Рассмотрим задачу об условиях устойчивости указанного нестационарного движения a = a0(t) .
Уравнение возмущенного движения можно привести к виду x = —pvt.x) — — ktx , (16)
гдеx = a — a0(t) – отклонение истинного движения от программного, k. = - S(x) = 4(1 — cos-)
1 i, v \ 2 ,


При выполнении условий
,
p(t, 0) =
—
^(lnp(t, 0)) > -2^! + a2, где a2 = const > 0, имеем равномерную асимптотическую устойчивость положения x = 0 системы (16) или равномерную асимптотическую устойчивость заданного нестационарного движения a = a0(t). системы (15). Из этой равномерной асимптотической устойчивости следует также равномерная устойчивость при любых постоянно действующих возмущениях.
При отсутствии сил вязкого трения в опорах OO', т.е. когда M=0 , и при противоположном ус-ловииp(t, 0) < -p0< 0, движение a = a0(t) . будет неустойчивым.
Можно отметить, что условия равномерной асимптотической устойчивости программного движения в исследованных задачах можно представить как условие определенной положительности второй вариации приведенной потенциальной энергии или функции 5 на программном движении и условие ограниченности логарифмического изменения этой вариации снизу.
Таким образом, получена зависимость, которая позволяет указать оптимальные выходные сигналы функции параметров исследуемой системы с целью получения требуемого сигнала на выходе.
Список литературы Исследование нестационарных движений физических систем
- Андреев А.С., Бойкова Т.А. Знакопостоянные функции Ляпунова в задачах об устойчивости//Механика твердого тела. 2002. Вып. 32. С.109-116.
- Бойкова Л.В., Бойкова Т.А. Аналитические методы исследования устойчивости движений механических систем с элементами из композиционных материалов.//Известия Самарского научного центра РАН. Специальный выпуск "Четверть века изысканий и экспериментов по созданию уникальных технологий и материалов для авиаракетостроения УТНЦ -ФГУП ВИАМ". 2008. Т.1. С.123-126.
- Рубановский В.Н., Самсонов В.В. Устойчивость стационарных движений в примерах и задачах. М.: Наука, 1988. 303 с.
