Исследование параметров транспортно-перегрузочной системы при сопряжении циклических видов транспорта

Автор: Ракаева Т.Г., Плехов П.В.
Журнал: Juvenis scientia @jscientia
Рубрика: Технические науки
Статья в выпуске: 2, 2016 года.
Бесплатный доступ
Рассмотрены параметры транспортно-перегрузочной системы при сопряжении циклических видов транспорта и их влияние на бесперебойную работу системы открытого карьера.
Карьер, управление, транспорт
Короткий адрес: https://sciup.org/14110096
IDR: 14110096
Study of parameters of transport overload of the system when pairing is cyclic modes of transport
Parameters of transport and handling system of opencast mining are described. Their influence to robust working of opencast mining is given.
Текст научной статьи Исследование параметров транспортно-перегрузочной системы при сопряжении циклических видов транспорта
Добыча полезных ископаемых занимает одно из значимых мест в развитии Пермского края. При разработке месторождений полезных ископаемых одной из составляющих себестоимости готовой продукции являются затраты на транспортирование горной массы. В основном транспонируемая горная масса – это горная порода (ГП) засоренная вредными примесями (глина, песок и прочее – не кондиции). Например, известняк, мрамор или гранит для стройматериалов. Прежде чем отправить на рынок сбыта добытые полезные ископаемые от них необходимо отделить вредные примеси, которые в свою очередь должны быть направлены в так называемый отвал пустых пород. На одном из карьеров Пермского края организован опытный перегрузочный пункт для разделения горной породы на чистые и засоренные фракции. При внедрении перегрузочного пункта в транспортном плече добавятся дополнительные транспортные магистрали, которые могут обусловить увеличение затрат на транспортировку горной массы. Возникает вопрос – «как рационально обеспечить работу перегрузочного пункта и где его расположить относительно перерабатывающего производства в готовую для сбыта продукцию (дробильно – сортировочная фабрика), добычных забоев карьера и отвала пустых пород?», что позволит использовать подвижной состав с минимальными транспортными затратами.
Суть проблемы специалистами карьера предложено решить на основе теории систем массового обслуживания (СМО). Расчеты выполнялись по известным математическим методам применяемых при погрузочно-разгрузочных работах [3,4] в основном в ручную, что может обусловить ошибки из-за их громоздкости, математических упрощений и преобразований.
В настоящей статье предлагается постановку первоочередной задачи и пути ее решения определить с использованием современных программных технологий.
Как известно первоочередной задачей является бесперебойное функционирование перегрузочного пункта. В сферу деятельности исследуемого опытного перегрузочного пункта включены следующие функции:
-
• приемка горной породы;
-
• разделение ее на засоренные не кондициями и чистые породы;
-
• складирование очищенной ГП;
-
• складирование не кондиций;
-
• погрузка и транспортировка очищенной породы на ДСФ;
-
• погрузка и транспортировка не кондициив отвал пустых пород.
При этом необходимо минимизировать простои автотранспорта и обеспечить непрерывную отгрузку ГП на ДСФ. Специалистами карьера с этой целью рассматривались два варианта перегрузочной системы (ПС). Первый вариант – это когда ПП является стационарным и объем складирования очищенной породы ограничен. И второй вариант – это когда ПП передвижной, что позволяет создать складирование очищенной породы теоретически неограниченным[5]. Рассмотрим оба варианта.
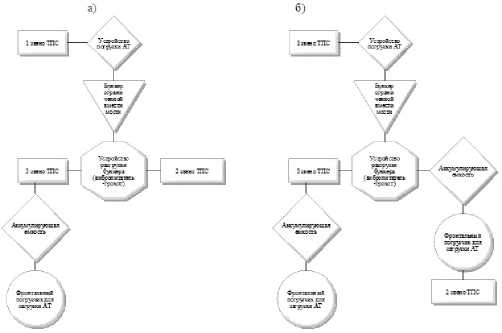
Рис. 1. Схема расположения ТПС
а) стационарное расположение установки по разделению горной породы; б) передвижное расположение установки по разделению горной породы
На рис.1 приведены структурные положения, где происходит разделение ГП.
Первое – когда перегрузочный пункт (ПП), установлен стационарно и взаимодействие системы исследуется в виде структуры изброженной на рис.1(а). Схема предусматривает:
-
• выгрузку ГП в приемный бункер,разделительной установки, сконструированной в ПП;
-
• разделение ГП на чистые и засоренные;
-
• загрузку АТ непосредственно из разделительной установки ПП;
-
• транспортирование конвейером из под разделительной установки и складирование не кондиций в отдельный навал.
Складская емкость в данном случае по вместимости ограничена бункером ПП.
Второе – когда перегрузочный пункт передвижной и складирует очищенную горную породу в штабель вдоль передвижения ПП. В этом случае взаимодействие системы рассматриваются в виде структуры изображенной на рис.1(б). При этом загрузка АТ очищенными породами осуществляется погрузочной техникой из продольного штабеля, например колесным погрузчиком. В этом случае бункером ограниченной вместимости можно пренебречь, так как вместимость штабеля, как отмечалось, может быть теоретически неограниченной.
Основная задача ПС – обеспечить бесперебойную работу первого звена автомобильного транспорта. В первом и во втором случаях это требование выполняется по-разному из-за возможностей складирования ГП. Увеличение объема складирования снижает простои сопрягаемых звеньев транспорта 1 и 2, соответственно снижает зависимость друг от друга. В то же время теоретически неограниченный штабель на самом деле должен иметь определенный объем с целью минимизации затрат на его строительство и дальнейшей эксплуатации. Следовательно, требуется определить его вместимость, обеспечивающую бесперебойную работу второго звена.
Немаловажное значение имеет частота поступления АТ на разгрузку (первое звено), то есть интенсивность поступления ГП в первое звено. В случае, когда интенсивность высока, АТ с горной породой будет простаивать, из-за ограниченности производительности разделительной установки и ограниченном объеме приемного бункера. В другом случае наоборот разделительная установка будет простаивать. Аналогично и во втором звене – при высокой интенсивности поступления АТ на загрузку очищенной породой, погрузочная техника может не справляться с обслуживанием АТ. Поэтому анализ общей ТПС вызывает определенные трудности. Следовательно, для удобства общую ТПС целесообразно разбить на локальные подсистемы с возможностью проведения их анализа как систем независимых:
-
1) карьер – АТ – ДСФ, отвал пустых пород, ПП;
-
2) приемный бункер – разделительная установка;
-
3) АТ – разделительная установка – АТ;
-
4) АТ – разделительная установка – штабель очищенной ГП – погрузочная техника – АТ;
-
5) разделительная техника конвейер транспорт (КТ) – навал не кондиций;
-
6) погрузочная техника – АТ – ДСФ – отвал пустых пород.
Как отмечено, успешная работа всей системы зависит от интенсивности поступающей на ПП горной породы, тогда ее можно определить из простого выражения:
Чм=[№) ~ окч)] ,z(t2 ~ч)=^е * ^ (1)
где ∆t = t2 - t1 (t2 > t1) – интервал времени между поступле- ниями ГП на разгрузку (1 звено АТ); Q(t1), Q(t2) – количество ГП, поступившей к моменту времени t1;t2.
Соответственно мгновенная интенсивность непрерывного грузопотока составит:

Естественно в период рабочей смены могут возникнуть случайные простои, обусловленные нестабильностью горных работ в забое, работой АТ и собственно работой перегрузочного пункта.
Обозначим периоды простояв работе ТПС– τпр.
Как отмечалось, для уменьшения периодов простоя -τпр в общем времени смены является увеличение на ПП емкости складирования очищенной ГП и увеличение производительности транспорта выходного звена. Имея значительный запас очищенной ГП в продольном штабеле, отгрузка ее потребителю уже не будет зависеть от входного звена и работы самого ПП, но будет зависеть от работы АТ на выходном звене. Для обеспечения максимального эффекта необходимо знать зависимость времени простоев ТПС от объема продольного штабеля очищенной ГП и процессов погрузки и перегрузки ГП, которые являются случайными. Следовательно, их можно исследовать вероятностными методами с использованием адекватных математических моделей. [4].
На рис. 2. приведена блок-схема модели расчета вероятностных состояний ТПС при сопряжении цикличных видов карьерного транспорта (автомобильно-автомобильный транспорт).
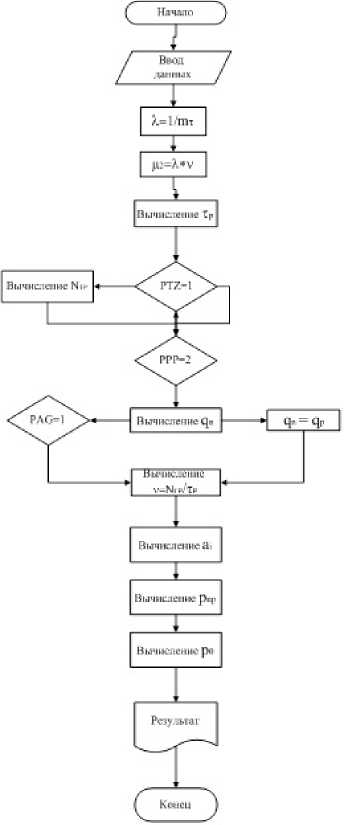
Рис. 2 Блок схема модели
Известно, что работа автотранспорта при перевозке груза является грузопотоком периодического (дискретного) действия и его можно охарактеризовать либо моментами поступления определенных объемов ГП либо временем его отсутствия.
В первом случае условно обозначим моменты поступления ГП через t1, t2, t3,..tn, промежутки между поступлением – τ1, τ2, τ3,...τn.
В общем случае интервалы времени являются случайными и, согласно теории вероятностей их можно рассматривать как независимые одинаково распределенные случайные, а для описания грузопотока достаточно знать распределения вероятностей случайной величины τ и величину горной массы Qвх. С этой целью составлен алгоритм решения (рис. 2).
Основными исходными технологическими показателями ТПС являются:
-
• производительность ТПС по входному грузопотоку ГП – Q c ;
-
• производительность ТПС по очищенной ГП–Q0;
-
• величина отходов ГП, передаваемых в навал не кондиций ленточным конвейером – Qк;
-
• величина грузопотока во вторую фазу обслуживания ТПС – Qʹ с ;
QC=QC-O, (3)
-
• вместимость бункера ТПС – W.
При принятом на карьере конструктивном исполнении ТПС общая вместимость – W может быть предусмотрена в виде:
-
1) накопления ГП только в бункере;
-
2) накоплением частично в бункере – Wб;
-
3) частично в продольном штабеле – Wш.
При сохранении баланса общая вместимость складывается из накопленной ГП частично в бункере и частично в штабеле (4).
п*=п;+п; (4)
-
• грузоподъемность автосамосвалов – qa;
-
• средний интервал прибытия автосамосвалов на разгрузку – mτ;
-
• расстояние транспортирования между подсистемами процесса – L;
-
• и связанное с ним время рейса автосамосвалов –(τр) tр;
-
• количество транспортных средств – Nтр.
Диапазон варьирования исходных показателей приведен в табл. 1.
|
Z |
км. |
1.0, 2.5, 5.0 |
A см |
т/см |
|
W |
т |
1 qa, 3 qa, 8 qa, 12 qa |
Эксплуатационные параметры ТПС можно характеризовать выходными параметрами вероятностных состояний системы:
-
• Р0 – вероятность того, что в ТПС отсутствует ГП, определяющая простои оборудования и задержку отгрузки очищен-нойгорной породы;
-
• Рп– вероятность того, то ТПС переполнена ГП, определяющая простои автомобильного транспорта в первом звене (входной поток груза);
-
• Рр – рабочая вероятность, определяющая промежуточное (рабочее) состояние ТПС, когда вместимость W не пуста и не переполнена.
Эксплуатационная сменная производительность системы – Асм определяется функцией вероятностных состояний системы Р0 и Рп.
Результатами моделирования и программного продукта являются зависимости Рр = f(W), Р0 = f(W), Р = f(W) при варьировании исходных параметров Qc, Qо, qa, mτ, Z. На основании полученных значений вероятностей можно будет определить вместимость приемного бункера и продольного штабеля очищенной горной породы, а также расстояние транспортирования груза с рабочих горизонтов карьера до перегрузочного пункта, обеспечивающие оптимальные эксплуатационные показатели.
Список литературы Исследование параметров транспортно-перегрузочной системы при сопряжении циклических видов транспорта
- Потапов М. Г. Карьерный транспорт М.: Недра, 1982. 347 с
- В.М. Акулиничев Математические методы в эксплуатации железных дорог. М.: Транспорт, 1981. 223 с
- Ананьин Г.П., В.А. Голутзин В.А., Гуляев О.К. Погрузочные и разгрузочные пункты подземного транспорта. М.: Недра, 1980 300с
- Юдин А.В., Кошев Г.Я. Параметры передвижной виброгрохотильной установки для карьеров//Горный журнал: Изв. ВУЗов. 1996. №3-4. С. 92-96
